
Dynamics of Classical Solutions of a Two-Stage Structured Population Model with Nonlocal Dispersal


1
Department of Mathematical Sciences, Northern Illinois University, DeKalb, IL 60115, USA
2
Department of Mathematical Sciences, University of Nevada Las Vegas, Las Vegas, NV 89154, USA
3
Department of Applied Mathematics and Statistics, Comenius University in Bratislava, Mlynská dolina, 84248 Bratislava, Slovakia
*
Author to whom correspondence should be addressed.
Mathematics 2023, 11(4), 925; https://doi.org/10.3390/math11040925
Submission received: 31 December 2022
/
Revised: 4 February 2023
/
Accepted: 10 February 2023
/
Published: 12 February 2023
(This article belongs to the Special Issue Dynamical Systems and System Analysis)
{kind=link}
Abstract
:We study the dynamics of classical solutions of a two-stage structured population model with nonlocal dispersal in a spatially heterogeneous environment and address the question of the persistence of the species. In particular, we show that the species’ persistence is completely determined by the sign of the principal spectrum point, , of the linearized system at the trivial solution: the species goes extinct if , while it persists uniformly in space if . Sufficient conditions are provided to guarantee the existence, uniqueness, and stability of a positive steady state when the parameters are spatially heterogeneous. Furthermore, when the model parameters are spatially homogeneous, we show that the unique positive equilibrium is globally stable with respect to positive perturbations.
MSC:
92D40; 92D50; 35P15; 35K571. Introduction
In this work, we study the dynamics of solutions of the nonlocal system of partial differential equations (PDE)
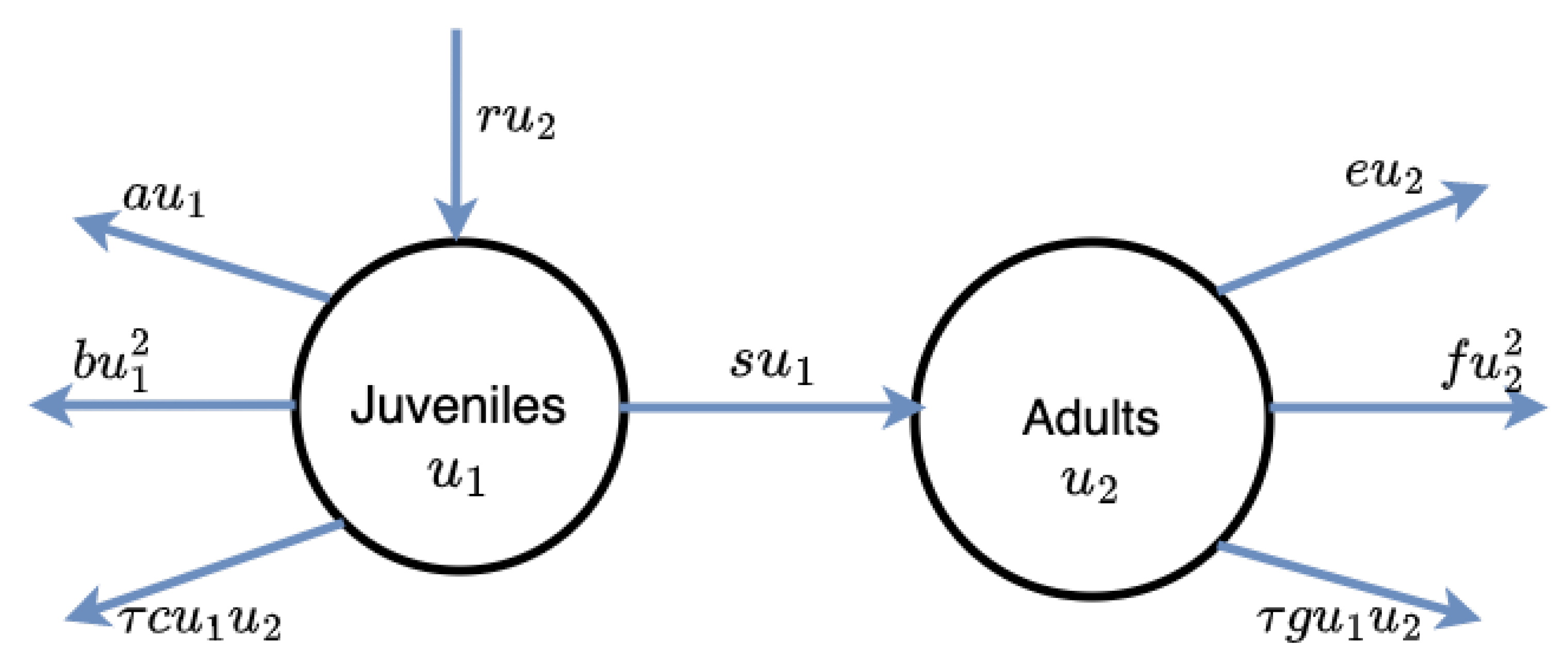
where represents the density function of a single species structured into two stages (juveniles and adults) and living in a bounded habitat : denotes the density function of the juveniles and that of the adults who have reached reproductive maturity age. The adults have local reproductive rate and the juveniles attain reproductive maturity at the rate . The juveniles have local death rate and self-limitation rate due to their size in space. The adults have a local death rate and local self-limitation rate induced by their size. Due to the interaction between the adults and the juveniles, there may exist an interspecific competition for local resources. Then, we denote by and the interspecific local competition rates of the adults and juveniles, respectively. Here, is a non-negative number and measures the strength of the interspecific competition. See Figure 1 below for a schematic illustration of the model. Throughout this work, we shall suppose that the kernel function is uniformly continuous, positive, and symmetric, i.e., for every . Furthermore, we suppose that the parameters of system (1) satisfy the following standing hypothesis.
Hypothesis 1.
The functions , and s are Hölder continuous on and non-negative, r and s are non-identically zero, and b and f are strictly positive.
System (1) is the nonlocal dispersal counterpart of the following population system with random (local) dispersal and Neumann boundary conditions
where is the outward unit normal to The parameters of system (2) have the same meaning as those of system (1). The models (1) and (2) describe the population dynamics of a dispersing species structured into two-stage subpopulations. The authors in [1,2] studied the model (2) as a problem in optimal control. Most studies on population models typically investigate different species competing for shared resources under the assumption that each species has similar characteristics among its kind. However, it is natural for species to involve individuals at different maturity stages who exhibit varying characteristics which significantly influence their survival or extinction. Consequently, several authors have studied the population dynamics of stage-structured species with a random dispersal mechanism (see for example [1,2,3,4,5,6,7] and the references therein). Typically, their analysis on the dynamics of the system depends on the sign of the principal eigenvalue of the linearization of the system at the zero solution. In particular, it was shown in [3] that when and are positive constants, system (2) has a positive steady state if and only if the principal eigenvalue of its linearization at the zero solution is positive.
For unstructured population models for which species dispersal is modeled by pure diffusion, it is known that slow diffusion is advantageous for species’ survival (see [8,9,10,11] and the references therein). Recently, in [4], the authors examined the influence of diffusion rates on the persistence and extinction of the stage-structured model with random dispersal (2). Their theoretical results indicated that the persistence and extinction of the species depend on the spatial distribution of favorable habitats for the different subpopulations. Essentially, if the regions where adults can reproduce are the same as those where juveniles can mature, typically slow diffusion guarantees persistence, but if those regions are separated, then faster diffusion may be advantageous for the species’ survival.
It is typical to assume that a species’ dispersal is governed by random walking between adjacent spatial locations. Such an assumption give rise to local dispersal models such as (2). However, some organisms can move between non-adjacent spatial locations, exhibiting long-range dispersal. Nonlocal dispersal equations of the form (1) have been employed to model the population dynamics of such species (see [12,13,14,15,16,17]). For the nonlocal dispersal operator in (1), is a probability density function that gives the probability of jumping from location y to x. Thus, since gives the population density at time t and location x, gives the rate at which individuals from other places arrive at location x and gives the rate at which they leave location x.
Typical examples of such kernel function include the probability density function of the normal distribution
In [16], the authors established the relationship between such random dispersal equations such as (2) with Neumann boundary conditions and the nonlocal dispersal Equation (1). Hence, Equation (1) can be said to have a Neumann-type boundary condition. The techniques developed in the current work hold for general kernel functions having singularities at . Depending on the strength of the singularity in the later types of kernels at , they can be used to approximate solutions of fractional Laplacian operators (see [16,18,19,20,21] and the references therein ).
Our goal in this study is to examine to what extent the results obtained for model (2) extend to (1); hence, we study the dynamics of the model (1). Our analysis is based on the spectral bound of the linearization of the model (1) at the zero solution. Our results show that the principal spectrum point (see Definition 2 below) completely determines the persistence or extinction of the species modeled by (1) in the sense that the species die out if the principal spectrum point is nonpositive, but persist uniformly in time when it is positive (see Theorem 1). When persistence occurs, it is appropriate to examine the existence of a strictly positive steady state for the model and its stability with respect to positive perturbations. Understandably, such a steady state depends on the interaction magnitude . In the case of a spatially homogeneous environment, our studies show that for any , the system (1) has a unique positive steady state which attracts every positive solution (see Theorem 2). It is pertinent to mention that due to the lack of compactness induced by the nonlocal operators, the analysis of nonlocal dispersal systems pose extra challenge than their local dispersal counterparts. Nevertheless, for the spatially heterogeneous environment, we obtained sufficient conditions for the existence, uniqueness and local stability of a positive stationary solution of (1) when (see Theorems 3 and 4). Given that the persistence of the species modeled by (1) depends on the sign of the principal spectrum point, we established some criteria on the model parameters for the positivity or otherwise of the principal spectrum point. Thus, Theorem 5 provides sufficient conditions on the parameters for the persistence or extinction of the species.
The rest of the paper is organized as follows. Section 2 contains notations, definitions, and the main results. In Section 3, we provide a brief discussion of our theoretical results on model (1), compare them to some related results on model (2), and highlight some future directions. The proof of our main results are presented in Appendix A, Appendix B and Appendix C.
2. Notations, Definitions and Main Results
2.1. Notations and Definitions
Before stating our main results on the classical solutions of (1), we first introduce a few notations and definitions. Let denote the Banach space of uniformly continuous and bounded functions on endowed with the sup-norm; for every . Since the density functions are non-negative, we will be interested in the following subsets of X:
and
We shall use bold-face letters to represent vectors. In particular, we use to denote vectors in . For convenience, we also use for elements of . Hence, any vector in can be understood as a constant vector valued function on ; this would not cause any confusion in the paper. We endow with the norm
Hence, is also a Banach space. Given a function , we set
We consider the following ordering in :
We adopt the following definition for classical solutions of (1).
Definition 1.
Thanks to the type of nonlinearity in (1), the following result on the existence and uniqueness of classical solutions of system (1) follows from standard arguments from the literature on semigroup theory and positivity of semigroup generated by nonlocal operators [22,23].
Proposition 1.
Let . Given any initial data , there is a unique corresponding global and bounded classical solution . Moreover, if is not identically null, then for all .
It is clear that the null function , called the trivial solution, is an equilibrium solution of (1). To study the stability of the trivial solution, the sign of the "principal spectrum point" of the linearization of model (1) at will be essential. For convenience, we first recall the following definition.
Definition 2
(Principal spectrum point). Let E be a Banach space and be a linear map where is a linear subspace of E. Let denote the spectrum of B. The principal spectrum point (PSP) of B, denoted by , is defined as
For our purpose in the current work, the Banach space in Definition 2 will be either or , while the linear operator B will always be a bounded linear map on E. Hence, in the current work, will always be nonempty and bounded, so that the PSP is a real number.
Given , consider the bounded linear operators
and
Next, given a bounded linear operator on X and a real vector , we denote by the bounded linear operator on given by
For convenience, set
and define the bounded linear operator ,
Note that by the Perron-Frobenius theorem, for every , the cooperative matrix has a maximal eigenvalue, which we shall denote by .
2.2. Main-Results
We state our main results in the current subsection. Our first result is on the global stability of the trivial solution .
Theorem 1.
Let and be the PSP of the bounded linear map . Let be a classical solution of (1) with a positive initial data .
- (i)
- If , then for every , there is , independent of initial data and τ such that
- (ii)
- If , then
- (iii)
- If , then there is , independent of initial data, such thatFurthermore if and , then there is which depends on the initial data and τ, such that
It follows from Theorem 1 that the sign of determines completely the persistence of the species. Indeed, if , then by Theorem 1 (i) and (ii), every classical solution eventually goes extinct in the long run uniformly in space. However, if , then the species persists uniformly in the sense of (13). It is important to note that is independent of the non-negative parameter . Hence, the persistence or extinction of the species is independent of the magnitude of .
A natural quest is to understand the long-time behavior of classical solutions of (1) when . In particular, we are interested in whether (1) has a stable steady-state solution which attracts all positive solutions whenever . In this direction, when all the parameters are independent of x, our next result shows that (1) has a unique positive equilibrium point which attracts every classical solution. More specifically, the following result holds.
Theorem 2.
Suppose that and r, and s are spatially homogeneous. Then for every , (1) has a unique constant positive steady-state solution . Moreover, given any positive initial data , converges to as t tends to infinity in the sense that
Thanks to Theorems 1 and 2, the global dynamics of classical solutions of system (1) are well understood when the parameters in the model are spatially homogeneous. However, when these parameters depend on x and , the existence and uniqueness of a positive steady state remain unclear. This is due to the lack of compactness induced by the nonlocal operators used to describe the dispersal modes of the species and the fact that the flow of classical solutions induced by (1) is not monotone when .
When the parameters depend on x and , system (1) is cooperative, and some standard methods, based on the theory of monotone dynamical systems from the literature, can be employed to study the global dynamics of the classical solutions (see [24]). Our next result provides some sufficient conditions, which guarantees the existence, uniqueness, and local stability of a positive steady state of system (1) when . In the next two results, we suppose that the parameter functions depend on the variable x.
Theorem 3.
- (i)
- Let such that . Then there is such that for every , (1) has a unique positive steady state solution . Moreover, for every , is linearly stable.
- (ii)
- If , then for every , there is such that for every diffusion rate satisfying , (1) has a unique positive steady state solution . Furthermore, is linearly stable.
For each for which , Theorem 3 (i) shows that system (1) has a unique and linearly stable positive steady state for every . Note from Theorem 2 that when the parameters are spatially homogeneous. In general, when the parameters depend on the spatial variable, it is unclear whether . Our next result is concerned with the global stability of the positive steady state given by Theorem 3.
Theorem 4.
Suppose that . The following conclusions hold.
- (i)
- (ii)
Next, we examine some sufficient conditions on the spatial heterogeneity of model (1) to determine the sign of for any diffusion rate . First, note that is independent of the diffusion rate when all the parameters are spatially homogeneous. In this case, equals the maximal eigenvalue of the cooperative matrix A. In general, when the parameters depend on the space variable x, may not be an eigenvalue (see [25,26] for examples). Moreover, in such a case, there is no explicit variational characterization formula for . From the application viewpoint, it is of particular importance to find sufficient conditions to determine the sign of . Inspired by the results in [4], we have the following result.
Theorem 5.
Suppose that and .
- (i)
- If either or , then for any diffusion rate .
- (ii)
- If either or , then for any diffusion rate .
Theorem 5 provides sufficient hypotheses on the parameters which guarantee that the sign of is independent of the diffusion rate of the species. Note that, when the parameters are spatially homogeneous, is independent of and if , if , and if . Hence, the first assumption in Theorem 5 (i) and (ii) are consistent with that of the ODE model. Next, observe that (resp. ) is the ratio of the growth rate to the self-limitation rate of the adults (resp. juveniles). Hence, on one hand, Theorem 5 (i) indicates that if the product of the maximum of these ratios is smaller than one, then species cannot survive and will go extinct in the long run irrespective of the diffusion rate. On the other hand, if the product of the minimum of these ratios is greater than one, Theorem 5 (ii) indicates that the species will always persist uniformly in space for any diffusion rate.
3. Conclusions and Future Directions
In this study, we examined the dynamics of classical solutions of a population adopting a long-range dispersal migration and structured in two stages, juveniles and adults. In particular, we addressed the question of the persistence of the species. In this direction, Theorem 1 indicates that the sign of the principal spectrum point of the linearization of system (1) at the trivial solution completely determines the species’ persistence or extinction. More precisely, if , the species eventually goes extinct uniformly in space while it persists uniformly in space if . This result agrees with the dynamics of classical solutions of model (2) where a random local dispersal is used to describe the evolution of the species. Indeed, Cantrell, Cosner, and Martinez (Lemma 2 in [4]) showed that if the principal eigenvalue, , of the linearization of system (2) at the trivial solution is positive, then the species persists uniformly in space while it goes extinct otherwise. Note that the analyses of system (2) rely largely on the compactness of its solution operator; however, the semiflow generated by classical solutions of (1) is not compact. Consequently, might not be an eigenvalue. This lack of compactness of the semiflow generated by classical solutions of system (1) induces some difficulties, and several techniques developed for system (2) cannot be applied to system (1).
When and the environment is homogeneous, Theorem 2 shows that the species eventually stabilize in the long run at the unique stationary equilibrium solution. Our proof of this result relies on constructing a delicate Lyapunov function (see Lemma A3). This Lyapunov function is concave and can also be used to obtain the global stability of classical solutions of system (2) and the corresponding kinetic model. It is important to note that Bouguima and Mehlia (Theorem 2.1 in [27]) used the Poincaré–Bendixon theory to conclude the uniqueness and global stability of the unique stationary equilibrium for the kinetic model. However, this method is only suitable for the ODE model.
When the environment is heterogeneous, and under suitable smallest assumption on the interspecific competitions terms between the juveniles and the adults, Theorems 3 and 4 guaranteed the existence and stability of a positive steady state solution of system (1). It would be of great interest to know whether (1) always has a unique and globally stable positive steady state solution whenever . This question also remains open for system (2). In this direction, for system (2) and when , it is important to note that Brown and Zhang (Theorem 3.2 in [3]) established the existence of at least one positive steady state, Bouguima and Mehlia (Propositision 6.1 in [27]) obtained a sufficient condition of the initial data which guarantee the global stability of the unique positive steady state solution, and Cantrell, Cosner, and Martinez (Lemma 3 in [4]) conclude the global stability of the positive steady solution if is sufficiently small.
There are several important prospects to consider in future studies on the dynamics of solutions of (1).
- (i)
- Effect of dispersal rates on The necessary and sufficient condition for persistence is the positivity of . Unlike the case of unstructured single species and local reaction diffusion equation, there is no explicit formula for . This makes the study of with respect to the diffusion rates difficult. However, in several instances, juveniles do not move or move very slowly whereas adults have a high movement rate. This is the case for some species of birds. Hence, it is of great biological interest to study the asymptotic behavior of when one of the diffusion rates is small while the other is large.
- (ii)
- Global stability of positive steady states. Understanding the long-time behavior of classical solutions of model (1) is essential since it helps to provide some accurate prediction on the future of the species. In the current work, we completely settled this question in the case of a homogeneous environment or the smallest assumption on . Further efforts are needed for the case of arbitrary .
- (iii)
- Asymptotic profile of positive steady states with respect to diffusion rates. When species persist and eventually stabilize, from an ecological viewpoint, it is important to know the spatial distribution of the species. This would be determined by the influence of the diffusion rates on the steady states. In this direction, we hope that future works would explore the dependence of positive steady-state solutions of system (1) on the diffusion rates.
- (iv)
- Effect of temporal heterogeneity on the dynamics of (1). An important fact not considered in our study is the effect of temporal heterogeneity on the dynamics of solutions of model (1). It would be of important biological interest to study the dynamics of solutions of (1) in time-periodic environments.
Author Contributions
Conceptualization, methodology, formal analysis, writing—original draft preparation, writing—review and editing, visualization, M.A.O., R.B.S., M.O.U., C.I.U. All authors have read and agreed to the published version of the manuscript.
Funding
C. I. U. acknowledges the support of the Slovak Research and Development Agency under the project APVV-20-0311.
Data Availability Statement
Not applicable.
Acknowledgments
The authors appreciate Daniel Ševčovič for making helpful suggestions. They also thank the anonymous reviewers for carefully reading through the manuscript and their insightful suggestions which improved the presentation of the study.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Proof of Theorem 1
For convenience, we first present some preliminary results to be used in the proofs of our main results in the subsequent sections. Linearizing (1) at the trivial solution gives
Note that (A1) can be rewritten as
Let denote the uniformly continuous semigroup generated by the bounded linear operator on . Hence, for every , is the unique solution of (A2), equivalently (A1), with initial data . Since is cooperative for each , the uniformly continuous semigroup is strongly positive, in the sense that
Define the nonlinear continuous function ,
Hence, the nonlocal PDE (1) can be rewritten in the compact form
Therefore, by the variation of constants formula, for a given initial data , if exists on a time interval for some , then it can be rewritten as
The following result shows that the principal spectrum point equals the exponential growth bound of the uniformly continuous semigroup . This result turns out to be of particular importance in the arguments used to prove some our main results.
Proposition A1.
and
Proof.
Let denote the uniformly continuous semigroup of bounded linear operators generated by the bounded linear operator on X. This means that given any , is the unique solution of
By the comparison principle for linear nonlocal operators, is strongly monotone, in the sense that
Finally, we introduce the function
Note that .
Now, observe that when in (1), it reduces to the following cooperative system
Choose a positive constant vector such that
Then, is a supper solution of (A10), which implies that the unique classical solution of system (A10), equivalently of (1) with , with initial data decreases over time. Let
The following result holds.
Lemma A1.
Proof.
Step 1. We first show that is a steady state solution of (A10). To do this, we observe that is a solution to (A10) with initial ; therefore,
Observe that, for each ,
Taking the limit of both sides, using the dominated convergence theorem yields
which implies that
Similar arguments can be applied to the second equation of (A10) to show that
Hence, is a steady state solution of (A12).
Step 2. We show that this limit function is continuous, i.e., . First note that satisfies
where
Now, we distinguish two cases.
Case 1. In this case, we suppose that there is some and such that . Without loss of generality, we suppose that . Then, from the first equation of (A13), we obtain that
since and on . It then follows from the formula for , the positivity of the kernel , and the fact that on and measurable, that equals zero almost everywhere on and . Consequently, we obtain from the first equation of (A13) that almost everywhere on . Thus, by multiplying the second equation of (A13) by r and using the fact that almost everywhere on , we obtain that
from which we deduce that for some because on a set of positive measure. Whence, as above, we also obtain that almost everywhere on and . Let
Since for every and on , we then obtain from (A13) and the fact that almost everywhere on , that
Now, we claim that . To this end, we assume that . Let , and be Hölder continuous functions which extend the functions and s on some open neighborhood, , of , respectively. Consider the function by
where
and
Clearly, is Hölder continuous in locally uniformly for and of class in . Calculating the Jacobian of at yields
Evaluating the determinant of at for , we obtain
In this case, we observe that (A13) yields
and
Therefore, the above determinant becomes
Hence, by the implicit function theorem (Theorem 1.1 in [29]), there exist open neighborhoods of and of , and a continuous function such that for every , the algebraic equation has a solution if and only if . Therefore, for all . Moreover, by the continuity of at and the fact that , there is an open neighborhood of such that . In particular,
which implies that . Hence, , which gives a contradiction. Therefore, . Therefore, we obtain here that .
Case 2. Suppose here that for every . We show that . Consider again the function defined above. This time, for every , we have
Hence, it follows from the implicit function theorem (Theorem 1.1 in [29]) that the continuous function exists on as in the previous case and that on . Therefore, is continuous on .
From cases 1 and 2 above, we have that .
Step 3. Suppose that ; we show that . From the above, we have that either or . Suppose, for contradiction, that . We observe that since is a steady state solution of (A10) and (H) holds, taking , then
This implies that
Hence, since for every then
Thus, using (A7), we obtain
This contradicts the fact that . Therefore, we must have
Step 4. Suppose that . We show that . Since , by Dini’s theorem, the limit in (A12) holds uniformly in . This implies that for every , there is such that
Hence, taking , and observing that
we obtain,
Now, choose such that for each . It then follows from the above inequality that
From which we deduce that
Since for every , we deduce that
(A15) and (A16) yield
Therefore, since (A7) holds and for all , letting in (A17) gives
We then conclude that since is arbitrary chosen and . It then follows from case 2 of step 1 that . Moreover, since , it is easily seen that (1) is strongly cooperative and subhomogeneous, therefore, is the unique strictly positive steady-state of (1). □
Remark A1.
Lemma A2.
Suppose that and let be fixed. Suppose also that and . Let be the unique positive steady state solution of (A10) given by Lemma A1. There is such that for every , for all whenever .
Proof.
Let and
Let and satisfy . Consider the mapping , defined by
and
for every . Since solves (1), then satisfies
Next, fix and let
Since and , then . Now, we claim that . If not, then there is some and such that
Without loss of generality, we may suppose that , since the case of can be proved similarly. From (A18), is the unique classical solution of
Now, since is a positive steady state solution of (A10), then
for all , where . As a result, choosing such that
the function satisfies
for all . Therefore, by the comparison principle for single-species nonlocal equations we obtain that for all . In particular,
which contradicts (A19). Therefore, . This implies that for any and . Letting , yields the desired result. □
Now, we present the proof of Theorem 1.
Proof of Theorem 1.
(i) Let be a classical solution of (1) with a non-negative initial data . We first suppose that . Observe that is a subsolution of the linear cooperative system (A1), that is
Hence for all . If then for every , and the result follows. Now, suppose that . Hence for all . Since for all , then
Now, let . By (A7), there is , independent of and , such that
which together with (A21) yields
Hence, (10) holds.
(ii) Choose such that . Since is a subsolution of (A10), it follows that
Hence, from Lemma A1, we have that if , then
(iii) Set . For all there exists such that
Taking , , and we have
Whence,
Following a similar argument as in Step 4 of Lemma A1 we obtain that
Since is arbitrary, we conclude that
where depends only on but is independent of the initial This proves (12). Finally, since , there is (where is given by Lemma A2) such that . It then follows from Lemma A2 that for every , which yields (13). □
Appendix B. Proof of Theorem 2
We shall suppose that all the parameters , and s are constant. In this case, we have that is independent of the diffusion rate and . Throughout this section, we suppose that . By Remark A2, the kinetic model of (1), i.e., , is weakly uniformly persistent. Therefore, since solutions of (1) are eventually bounded, we can apply the persistence theory of dynamical systems [30,31] to conclude that for every , there is a positive equilibrium solution of
Note that is a positive spatially homogeneous equilibrium solution of (1). As we shall see from Lemma A3 below, is the unique positive solution of system (A22). For convenience, let
Observe from (A22) that
Observe also from (A22) that
Hence,
Next, let
It follows from the above computations that , and . Finally, we introduce the function
Note that for all with equality if and only if . Note also that the function is strictly convex. The function will be used to construct a Lyapunov function in the proof of Theorem 4.
Lemma A3.
Proof.
Note also that , and h are constants. For convenience, we set
By computations, thanks to (A22) and the fact that is symmetric, we obtain
Similarly,
It follows from (A26) and (A27) that
Next, since is symmetric, for every ,
Then, by (A28) and (A29),
Now, note that
Observe from (A23) that
from which we obtain
Combining (A32) and (A31) and the fact that yield
where . It is clear that is a positive constant and that for every . Therefore, by (A30), we have
Using the inequality
we obtain
and
By (A34) and (A35),
By rewriting (A28) as
where we have used the fact
it follows from (A36) that
Finally, we deduce from (A37) and (A38) that
which shows that (A25) holds. □
Observe from Lemma A3, mainly inequality (A25), that is the unique positive steady state solution of (1). In particular, system (A22) has a unique positive solution. As a first application of Lemma A3, we have the convergence of to as in the -space for any finite .
Lemma A4.
Proof.
Since for every and is eventually bounded, to complete the proof of the lemma, it is enough to show the result for . It is easy to see from (1) and the uniform boundedness of that the function is Lipschitz continuous on . On the other hand, by Lemma A3, there is a positive constant such that
However, since for all , then for all , which in view of the above inequality yield
Hence, as since the mapping is Lipschitz. □
Next, we show that is uniformly bounded away from zero.
Lemma A5.
Let be fixed. Let be a classical solution of (1) with a positive initial data . Then there is such that
Proof.
It follows from Theorem 1(iii). □
Thanks to Lemmas A4 and A5, we can now complete the proof of Theorem 2.
Proof of Theorem 2.
We proceed by contradiction. Suppose that there exist with such that
Consider the sequence . Observe that for , solves
Since is compact, without loss of generality (if possible after passing to a subsequence), we may suppose there is such that as . By Lemma A4 and Holder’s inequality, we have
uniformly for for every . Furthermore, since , then
Therefore, it follows from Arzela–Ascoli’s theorem that there is a non-negative function such that, up to a subsequence, as , locally uniformly on . Moreover, satisfies
Furthermore, using Lemma A5 and uniform boundedness of , there is such that
Moreover, it follows from (A39) that
Next, define the Lyapunov function
where h is the positive number in (A23) and is given by (A24). Using computations similar to those leading to (A25), we obtain
where and are the constants in (A23). Taking , it follows from (A41) and (A43) that
Hence,
Notice from (A43) and (A41) that , we then conclude from the last inequality that
Hence,
This, in turn, yields
Consequently, we deduce from (A44) that , which yield that for all . This clearly contradicts (A42). Therefore, the result follows. □
Appendix C. Proof of Theorems 3 and 4
Notice that the function in (A4) satisfies and
Thus, we have the following:
Lemma A6.
Suppose that and let be given by Lemma A1. Then there is and a -map satisfying such that
Moreover, for every , is the unique solution of (A45) in and .
Proof.
Observe that the mapping on , defined by
is cooperative. Furthermore, setting , since is a steady state solution of (1), we have
Hence, since and , . This implies that the linear functional is invertible. Hence, by the implicit function theorem, there is and a map satisfying such that for all . Moreover, for every , is the unique positive solution of in . Furthermore, since and is continuous in , if possible, by taking sufficiently small, we have that for every . □
Proof of Theorem 3.
(i) It follows from Lemma A6.
(ii) Suppose that and let . Then, by Theorem 2, for every , there is a unique positive equilibrium solution of the system
which we denote by . Moreover, the function . Now, consider the function defined by
where is defined in (A4). Hence, the function is of class . Furthermore, for every ,
Note from (A46) that
and
for every . Hence, is cooperative. Furthermore,
where . This shows that . Therefore, we can apply the implicit function theorem as in the proof of Lemma A6 to derive the desired result. □
We give a proof of Theorem 4.
Proof of Theorem 4.
(i) Suppose that and . In this case, (1) is cooperative and subhomogeneous. By Lemma A1, we know that (1) has a unique strictly positive steady state, . Furthermore, since (1) is cooperative and subhomogeneous, it follows from standards arguments that is globally stable with respect to positive perturbationS.
(ii) Suppose that and . Take
where is the unique strictly positive steady state solution of (1) for , is given by Theorem 3. Next, consider the closed-bounded interval
Let be fixed and be the unique strictly positive steady state solution of (1) guaranteed by Theorem 3. Since every non-negative classical solution of (1) is subsolution of (A10), and is globally stable for (A10), then every solution of (1) eventually lies in . Observe that, on , the semiflow generated by the classical solution of (1) is positive and subhomogeneous. Therefore, the unique strictly positive steady state, , is globally stable with respect to positive perturbations. □
The rest of this section will be devoted to prove Theorem 5. Hence, throughout the rest of the paper, we suppose that and and prove Theorem 5.
Proof.
(i) We divide the proof in two cases.
Case 1.
Suppose that . Chose satisfying
Now, choose two positive numbers and satisfying
and consider the constant vector . It follows from (A47) that
Therefore,
Hence, in view of the monotonicity of , we obtain
This along with the fact that implies that
Whence, by Proposition A1
Case 2.
Suppose that . Let be fixed and . Consider, the cooperative two-stage nonlocal system,
Since , it follows from Lemma A1 that (A48) has a unique positive steady state solution , that is solves
Moreover, since the right hand side of (A48) is strictly increasing in , is strictly increasing in . Therefore, by the arguments in the proof of Lemma A1, there is such that as uniformly in . In addition, solves
Hence, since , we conclude from Lemma A1 and (A50) that . Now, for every , multiply the first equation of (A49) by and integrate on to obtain
Similarly, multiplying the second equation of (A49) by yields
From (A51) and (A52), we obtain
Now, observe that
and
Hence, it follows from (A53) that
from which we deduce that
since . Letting in the last inequality yields
(ii) We also distinguish two cases.
Case 1.
Suppose that and choose such that
Now, choose two positive numbers such that and
and consider the constant vector . It follows from (A54) that
Therefore,
Hence, the monotonicity of yields
This along with the fact that implies that
Whence, by Proposition A1
Case 2.
Next, we suppose that . Let be fixed and . Let be the unique positive solution of (A49). Divide the first equation of (A49) by , integrate the resulting equation, and after using (A29), we obtain
Similarly, we obtain
Adding up the last two inequality and using the inequality , we obtain
Therefore, since as uniformly in , we deduce from the last inequality, after letting ,
□
References
- Arino, O.; Montero, J.A. Optimal control of a nonlinear elliptic population system. Proc. Edinb. Math. Soc. 2000, 116, 225–241. [Google Scholar] [CrossRef]
- Canada, A.; Magal, P.; Montero, J.A. Optimal control of harvesting in a nonlinear elliptic system arising from population dynamics. J. Math. Anal. Appl. 2001, 254, 571–586. [Google Scholar] [CrossRef]
- Brown, K.J.; Zhang, Y. On a system of reaction-diffusion equations describing a population with two age groups. J. Math. Anal. Appl. 1980, 282, 444–452. [Google Scholar] [CrossRef]
- Cantrell, R.S.; Cosner, C.; Martinez, S. Persistence for a two-stage reaction-diffusion system. Mathematics 2020, 8, 396. [Google Scholar] [CrossRef]
- Cantrell, R.S.; Cosner, C.; Yu, X. Population with individual variation in dispersal in heterogeneous environments: Dynamics and competition with simply diffusing populations. Sci. Chi. Math. 2020, 63, 441–464. [Google Scholar] [CrossRef]
- Cantrell, R.S.; Cosner, C.; Yu, X. Dynamics of populations with individual variation in dispersal in bounded domains. J. Biol. Dyn. 2018, 12, 288–317. [Google Scholar] [CrossRef]
- Henaoui, O. An elliptic system modeling two subpopulations. Nonlinear Anal. Real World Appl. 2012, 13, 2447–2458. [Google Scholar] [CrossRef]
- Cosner, C.; Lazer, A.C. Stable coexistence states in the Volterra-Lotka competition model with diffusion. SIAM J. Appl. Math. 1984, 44, 1112–1132. [Google Scholar] [CrossRef]
- Dockery, J.; Hutson, V.; Mischaikow, K.; Pernarowski, M. The evolution of slow dispersal rates: A reaction-diffusion model. J. Math. Biol. 1998, 37, 61–83. [Google Scholar] [CrossRef]
- Hastings, A. Can spatial variation alone lead to selection for dispersal? Theor. Popul. Biol. 1983, 24, 244–251. [Google Scholar] [CrossRef]
- Hetzer, G.; Nguyen, T.; Shen, W. Coexistence and extinction in the volterra-Lotka competition model with nonlocal dispersal. Commun. Pure Appl. Anal. 2012, 11, 1699–1722. [Google Scholar] [CrossRef]
- Bao, X.; Shen, W. Criteria for the existence of principal eigenvalues of time periodic cooperative linear systems with nonlocal dispersal. Proc. Am. Math. Soc. 2017, 145, 2881–2894. [Google Scholar] [CrossRef]
- Rawal, N.; Shen, W. Criteria for the existence and lower bounds of principal eigenvalues of time periodic nonlocal dispersal operators and applications. J. Dynam. Differ. Equ. 2012, 24, 927–954. [Google Scholar] [CrossRef]
- Onyido, M.A.; Shen, W. Nonlocal dispersal equations with almost periodic dependence. I. Principal spectral theory. J. Differ. Equ. 2021, 295, 1–38. [Google Scholar] [CrossRef]
- Shen, W.; Xie, X. On principal spectrum points/principal eigenvalues of nonlocal dispersal operators and applications. Disc. Cont. Dyn. Syst. 2015, 35, 1665–1696. [Google Scholar] [CrossRef]
- Shen, W.; Xie, X. Approximations of random dispersal operators/equations by nonlocal dispersal operators/equations. J. Differ. Equ. 2015, 259, 7375–7405. [Google Scholar] [CrossRef]
- Shen, W.; Zhang, A. Traveling wave solutions of Spatially periodic Nonlocal monstable equations. Commun. Appl. Nonlinear Anal. 2012, 19, 73–101. [Google Scholar]
- Antil, H.; Dondl, P.; Striet, L. Analysis and Approximation of Nonlocal Diffusion Problems with Volume Constraints. SIAM Rev. 2012, 54, 667–696. [Google Scholar]
- Cortazar, C.; Elgueta, M.; Rossi, J.D.; Wolanski, N. How to approximate the heat equation with Neumann boundary conditions by nonlocal diffusion problems. Arch. Ration. Mech. Anal. 2007, 187, 137–156. [Google Scholar] [CrossRef]
- D’Elia, M.; Gunzburger, M. The fractional Laplacian operator on bounded domains as a special case of the nonlocal diffusion operator. Comput. Math. Appl. 2013, 66, 1245–1260. [Google Scholar] [CrossRef]
- Duo, S.; Wang, H.; Zhang, Y. A comparative study on nonlocal diffusion operators related to the fractional Laplacian. Discret. Contin. Dyn. Syst. B 2019, 24, 231–256. [Google Scholar] [CrossRef]
- Henry, D. Geometric Theory of Semilinear Parabolic Equations; Lecture Notes in Mathematics (LNM); Springer: Berlin/Heidelberg, Germany, 2006; Volume 840. [Google Scholar]
- Pazy, A.L. Semigroups of Linear Operators and Applications to Partial Differential Equations; Springer: New York, NY, USA, 1983. [Google Scholar]
- Hess, P. Periodic-Parabolic Boundary Value Problems and Positivity; Pitman Research Notes in Mathematics 247; Longman Scientific & Technical: Harlow, UK, 1991. [Google Scholar]
- Coville, J. On a simple criterion for the existence of a principal eigenfunction of some nonlocal operators. J. Differ. Equ. 2010, 249, 2921–2953. [Google Scholar] [CrossRef]
- Shen, W.; Zhang, A. Spreading speeds for monostable equations with nonlocal dispersal in space periodic habitats. J. Differ. Equ. 2010, 249, 747–795. [Google Scholar] [CrossRef]
- Bouguima1, S.M.; Mehlia, F.Z. Asymptotic behavior of an age-structured population with diffusion. J. Appl. Anal. Comp. 2012, 2, 351–362. [Google Scholar]
- Engel, K.-J.; Nagel, R. One-Parameter Semigroups for Linear Evolution Equations; Springer: New York, NY, USA, 2000. [Google Scholar]
- Kumagai, S. An implicit function theorem: Comment. J. Opt. Theory Appl. 1980, 31, 285–288. [Google Scholar] [CrossRef]
- Magal, P.; Zhao, X.Q. Global attractors and steady states for uniformly persistent dynamical systems. SIAM J. Math. Anal. 2005, 37, 251–275. [Google Scholar] [CrossRef]
- Smith, H.L.; Thieme, H.R. Dynamical Systems and Population Persistence; American Mathematical Society: Providence, RI, USA, 2011; Volume 118. [Google Scholar]
Figure 1.
Illustrative diagram of the dynamics of a population structured in two stages, where is the density of the juveniles and is the density of the adults.
Figure 1.
Illustrative diagram of the dynamics of a population structured in two stages, where is the density of the juveniles and is the density of the adults.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Onyido, M.A.; Salako, R.B.; Uba, M.O.; Udeani, C.I. Dynamics of Classical Solutions of a Two-Stage Structured Population Model with Nonlocal Dispersal. Mathematics 2023, 11, 925. https://doi.org/10.3390/math11040925
AMA Style
Onyido MA, Salako RB, Uba MO, Udeani CI. Dynamics of Classical Solutions of a Two-Stage Structured Population Model with Nonlocal Dispersal. Mathematics. 2023; 11(4):925. https://doi.org/10.3390/math11040925
Chicago/Turabian StyleOnyido, Maria A., Rachidi B. Salako, Markjoe O. Uba, and Cyril I. Udeani. 2023. "Dynamics of Classical Solutions of a Two-Stage Structured Population Model with Nonlocal Dispersal" Mathematics 11, no. 4: 925. https://doi.org/10.3390/math11040925
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.