
Solid Isotropic Material with Penalization-Based Topology Optimization of Three-Dimensional Magnetic Circuits with Mechanical Constraints


Abstract
:1. Introduction
2. Formulation of the Coupled Mechanical and Magnetostatic Problem
2.1. Magnetostatic Problem
2.2. Mechanical Problem
- The first criterion to ensure robustness of the structure is to maximize its rigidity, which is equivalent to minimizing its compliance. In other words, we want a distribution which minimizes
- The second criterion is based on the von Mises stress expressed in terms of the components of the stress tensor as follows:The aim here is to minimize the maximal value taken by inside the optimized iron shape where , i.e.,Note that here the stress measure is defined by the relaxed stress instead of in order to ensure that the stress measure is zero in the air region where [14]. As the use of an infinite norm raises difficulties for the optimization method, we will instead use the following Kreisselmeier–Steinhauser (KS) function, , which is valid for large values of p:
2.3. Link between the Two Types of Physics
3. A SIMP-Based Optimization Problem
3.1. Penalization with Material Density Method
3.2. Sensitivity Analysis
- Definition of a constrained optimization problem in which is given by either , or and is either the magnetic potential or the displacement (solution of the PDE ):
- Introduction of a Lagrange multiplier associated with the constraint to obtain a Lagrangian function .
- Determination of the adjoint state solution of an adjoint equation from the Karush–Khun–Tucker theorem (partial derivatives of the Lagrangian with regard to and equal to zero).
- Computation of yields the sensitivity of the objective function with respect to the design variable ; derivation of the Lagrangian with regard to ; and evaluation using the solutions and of the direct and adjoint problems.
3.3. Optimization Algorithm
- The constraints on which are only the lower and upper bounds of the material density: .
4. Numerical Examples
4.1. Design Problem
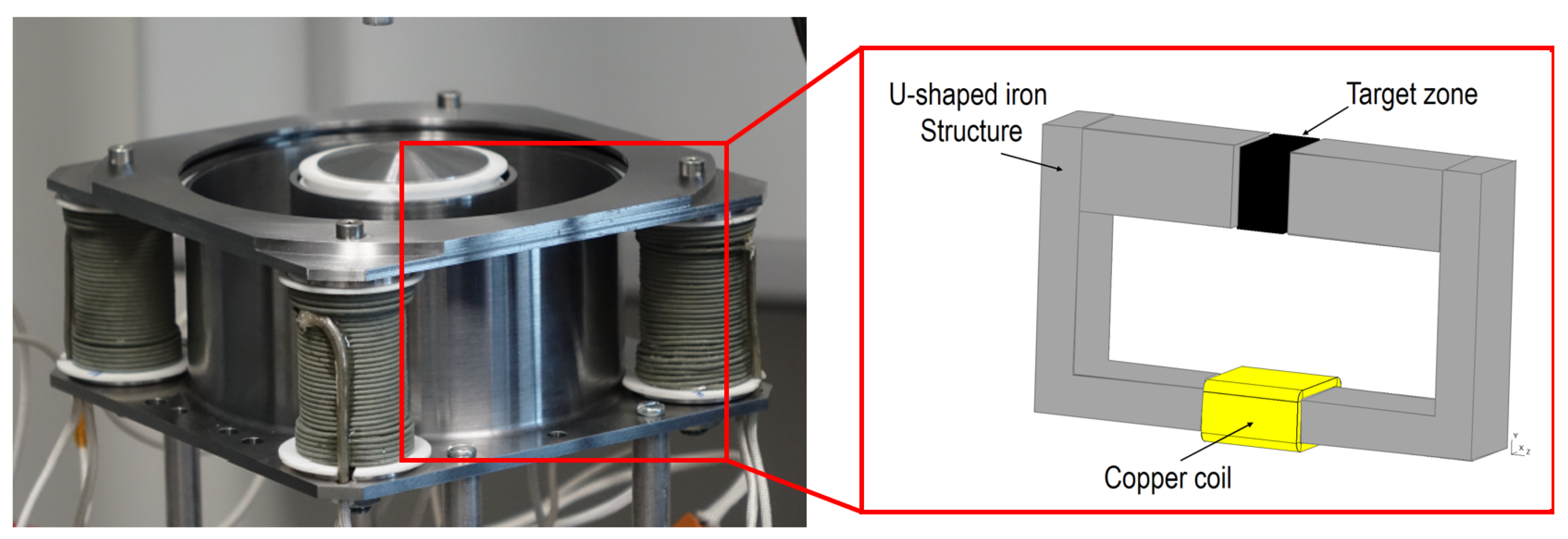
- A fixed part of the U-shaped iron structure represented on Figure 1. Its dimensions are 23 cm × 14 cm × 2 cm, the thickness of the bottom hyper-rectangle containing the coil is 2 cm, and the thickness of both sides of the U-shaped circuit is 4 cm.
- A coil which is represented in yellow on Figure 1. It is made up from two bottom and top bars of 4 cm × 0.4 cm × 5 cm and two lateral bars of 2 cm × 0.4 cm × 5 cm which are linked by four curved bars. This coil is crossed by a current of 4 A and has 300 windings.
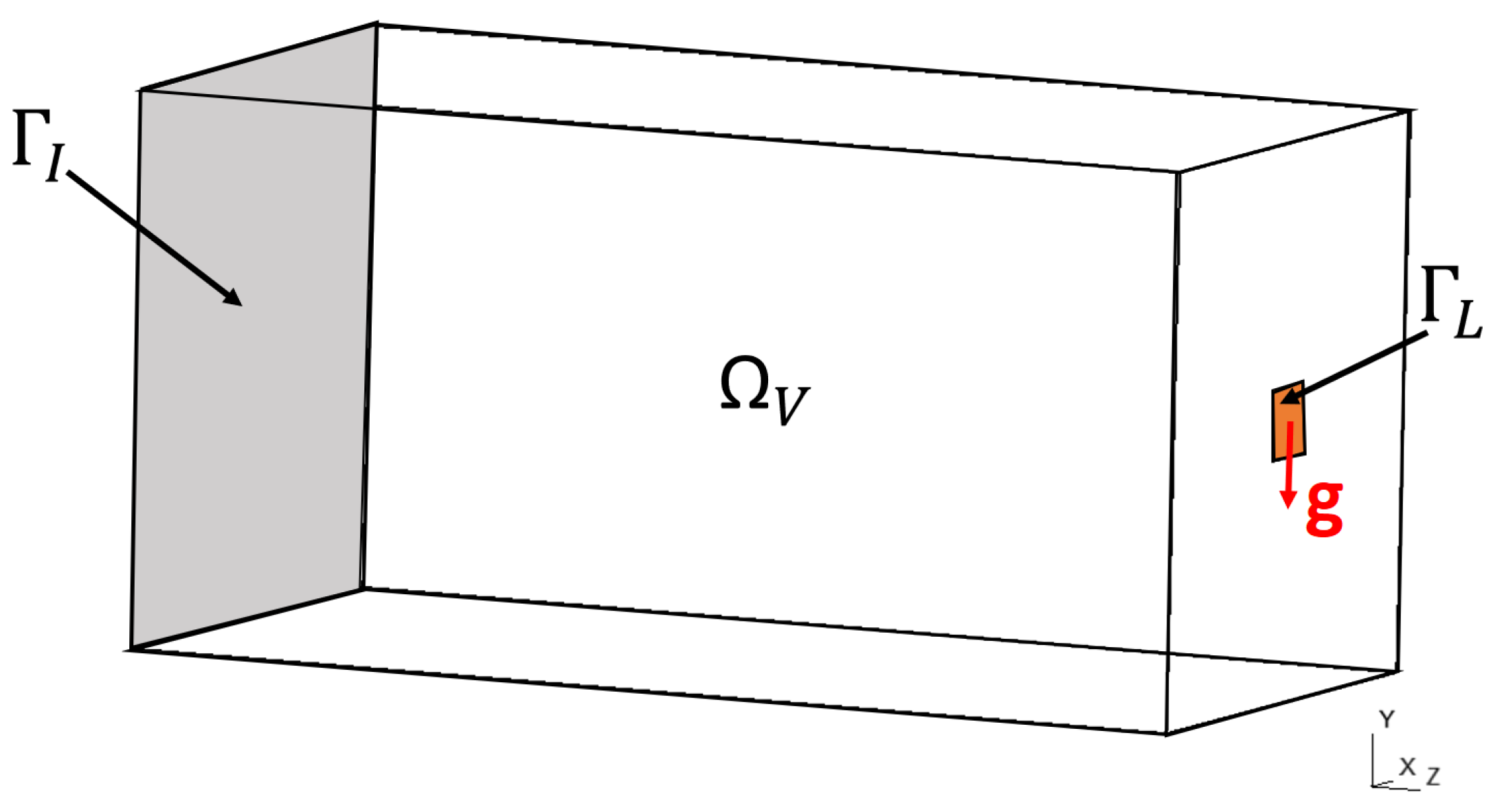
- Two design variable zones which are hyper-rectangles of size 8 cm × 4 cm × 4 cm. Both of these two parts are discretized into 144,800 tetrahedrons corresponding to the finite element mesh, which contains air or ferromagnetic material. Both of these parts are subjected to a surface force of (N/m2) on a small surface of size 0.5 cm × 0.5 cm, as we can see in Figure 3. Note that the mechanical functions and considered in the article are linearly dependent on the amplitude of the surface force . Therefore, the optimal design obtained by minimizing one of these two functions does not depend on this amplitude. Thus, this amplitude has been arbitrarily set to 1 (N/m2).
4.2. Problem Considering Magnetostatics Only
4.3. Problem Combining Compliance Minimization and Magnetostatics
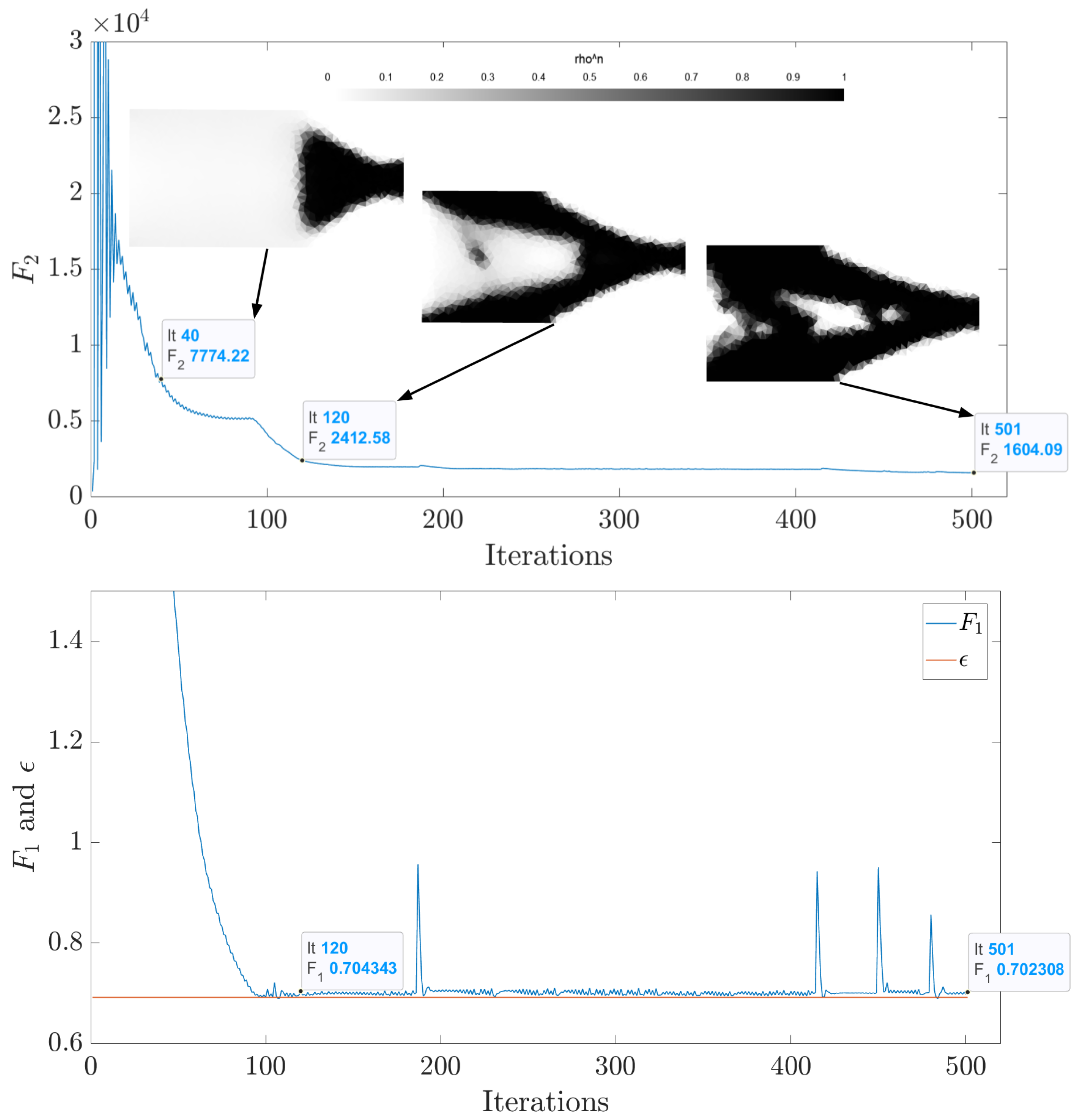
4.4. Problem Combining Global Stress Measure Minimization and Magnetostatics
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Propositions 2 and 3
Appendix A.1. Particular Case of Compliance F2
Appendix A.2. Particular Case of Global Stress Measure :
References
- Allaire, G.; Schoenauer, M. Conception Optimale de Structures; Springer: Berlin, Germany, 2007; Volume 58. [Google Scholar]
- Bendsoe, M.P.; Sigmund, O. Topology Optimization: Theory, Methods, and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Sigmund, O. Morphology-based black and white filters for topology optimization. Struct. Multidiscip. Optim. 2007, 33, 401–424. [Google Scholar] [CrossRef]
- Bendsøe, M.P.; Sigmund, O. Material interpolation schemes in topology optimization. Arch. Appl. Mech. 1999, 69, 635–654. [Google Scholar] [CrossRef]
- Sanogo, S.; Messine, F.; Henaux, C.; Vilamot, R. Topology optimization for magnetic circuits dedicated to electric propulsion. IEEE Trans. Magn. 2014, 50, 1–13. [Google Scholar] [CrossRef]
- Gauthey, T.; Gangl, P.; Hassan, M.H. Multi-material topology optimization with continuous magnetization direction for permanent magnet synchronous reluctance motors. arXiv 2021, arXiv:2107.04825. [Google Scholar]
- Youness, R.; Messine, F. An implementation of adjoint-based topology optimization in magnetostatics: Application to design hall-effect thrusters. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2019, 38, 1023–1035. [Google Scholar] [CrossRef]
- Cherrière, T.; Laurent, L.; Hlioui, S.; Louf, F.; Duysinx, P.; Geuzaine, C.; Ben Ahmed, H.; Gabsi, M.; Fernández, E. Multi-material topology optimization using Wachspress interpolations for designing a 3-phase electrical machine stator. Struct. Multidiscip. Optim. 2022, 65, 352. [Google Scholar] [CrossRef]
- Houta, Z.; Messine, F.; Huguet, T. Topology Optimization for Magnetic Circuits with Adjoint Method in 3D. COMPEL 2023. Available online: https://hal.science/hal-04095069v2 (accessed on 10 March 2024).
- Gangl, P.; Amstutz, S.; Langer, U. Topology optimization of electric motor using topological derivative for nonlinear magnetostatics. IEEE Trans. Magn. 2015, 52, 7201104. [Google Scholar] [CrossRef]
- Brun, O.; Chadebec, O.; Ferrouillat, P.; Niyonzima, I.; Luo, Z.; Le Floch, Y.; Siau, J.; Vi, F.; Gerbaud, L. A Level-Set Based Topology Optimization for Maximizing the Torque of Switch Reluctance Machines. In Proceedings of the 24th International Conference on the Computation of Electromagnetic Fields (Compumag’2023), Kyoto, Japan, 22–26 May 2023. [Google Scholar]
- Cherrière, T. Élaboration de Méthodes et d’Outils Logiciels pour l’Optimisation Topologique Magnéto-Mécanique de Machines Électriques Tournantes. Ph.D. Thesis, Université Paris-Saclay, Paris, France, 2023. [Google Scholar]
- Rossi, A.; Messine, F.; Hénaux, C. Parametric optimization of a Hall Effect Thruster magnetic circuit. Trans. Jpn. Soc. Aeronaut. Space Sci. Aerosp. Technol. Jpn. 2016, 14, 197–202. [Google Scholar] [CrossRef] [PubMed]
- Cheng, G.; Guo, X. ϵ-Relaxed Approach in Structural Topology Optimization. Struct. Optim. 1997, 13, 258–266. [Google Scholar] [CrossRef]
- Céa, J. Conception optimale ou identification de formes, calcul rapide de la dérivée Directionnelle de la Fonction coût. M2AN-Model. Math. Anal. Numer. 1986, 20, 371–402. [Google Scholar] [CrossRef]
- Lukáš, D. An Integration of Optimal Topology and Shape Design for Magnetostatics. In Scientific Computing in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2006; pp. 227–232. [Google Scholar]
- Le, C.; Norato, J.; Bruns, T.; Ha, C.; Tortorelli, D. Stress-based topology optimization for continua. Struct. Multidiscip. Optim. 2010, 41, 605–620. [Google Scholar] [CrossRef]
- Svanberg, K. The method of moving asymptotes—A new method for structural optimization. Int. J. Numer. Methods Eng. 1987, 24, 359–373. [Google Scholar] [CrossRef]
- Li, L.; Khandelwal, K. Volume preserving projection filters and continuation methods in topology optimization. Eng. Struct. 2015, 85, 144–161. [Google Scholar] [CrossRef]
- Guest, J.K.; Prévost, J.H.; Belytschko, T. Achieving minimum length scale in topology optimization using nodal design variables and projection functions. Int. J. Numer. Methods Eng. 2004, 61, 238–254. [Google Scholar] [CrossRef]
- Dular, P.; Geuzaine, C. GetDP Reference Manual. 2024. Available online: https://getdp.info/dev/doc/texinfo/getdp.pdf (accessed on 10 March 2024).
- Geuzaine, C.; Remacle, J.F. Gmsh: A 3-D finite element mesh generator with built-in pre-and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Remacle, J.F.; Geuzaine, C. Gmsh Reference Manual. 2024. Available online: https://gmsh.info/dev/doc/texinfo/gmsh.pdf (accessed on 10 March 2024).
- Lucchini, F.; Torchio, R.; Cirimele, V.; Alotto, P.; Paolo, B. Topology Optimization for Electromagnetics: A Survey. IEEE Access 2022, 10, 98593–98611. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Houta, Z.; Huguet, T.; Lebbe, N.; Messine, F. Solid Isotropic Material with Penalization-Based Topology Optimization of Three-Dimensional Magnetic Circuits with Mechanical Constraints. Mathematics 2024, 12, 1147. https://doi.org/10.3390/math12081147
Houta Z, Huguet T, Lebbe N, Messine F. Solid Isotropic Material with Penalization-Based Topology Optimization of Three-Dimensional Magnetic Circuits with Mechanical Constraints. Mathematics. 2024; 12(8):1147. https://doi.org/10.3390/math12081147
Chicago/Turabian StyleHouta, Zakaria, Thomas Huguet, Nicolas Lebbe, and Frédéric Messine. 2024. "Solid Isotropic Material with Penalization-Based Topology Optimization of Three-Dimensional Magnetic Circuits with Mechanical Constraints" Mathematics 12, no. 8: 1147. https://doi.org/10.3390/math12081147