

Spatial Decay Estimates and Continuous Dependence for the Oldroyd Fluid
School of Data Science, Guangzhou Huashang College, Guangzhou 511300, China
Mathematics 2024, 12(8), 1240; https://doi.org/10.3390/math12081240
Submission received: 1 February 2024
/
Revised: 14 April 2024
/
Accepted: 15 April 2024
/
Published: 19 April 2024
(This article belongs to the Special Issue Applications of Differential Equations in Sciences)
{kind=link}
Abstract
:This article investigates the Oldroyd fluid, which is widely used in industrial and engineering environments. When the Oldroyd fluid passes through a three-dimensional semi-infinite cylinder, the asymptotic properties of the solutions are established. On this basis, we also studied the continuous dependence of the viscosity coefficient.
1. Introduction
In this paper, we let R denote that
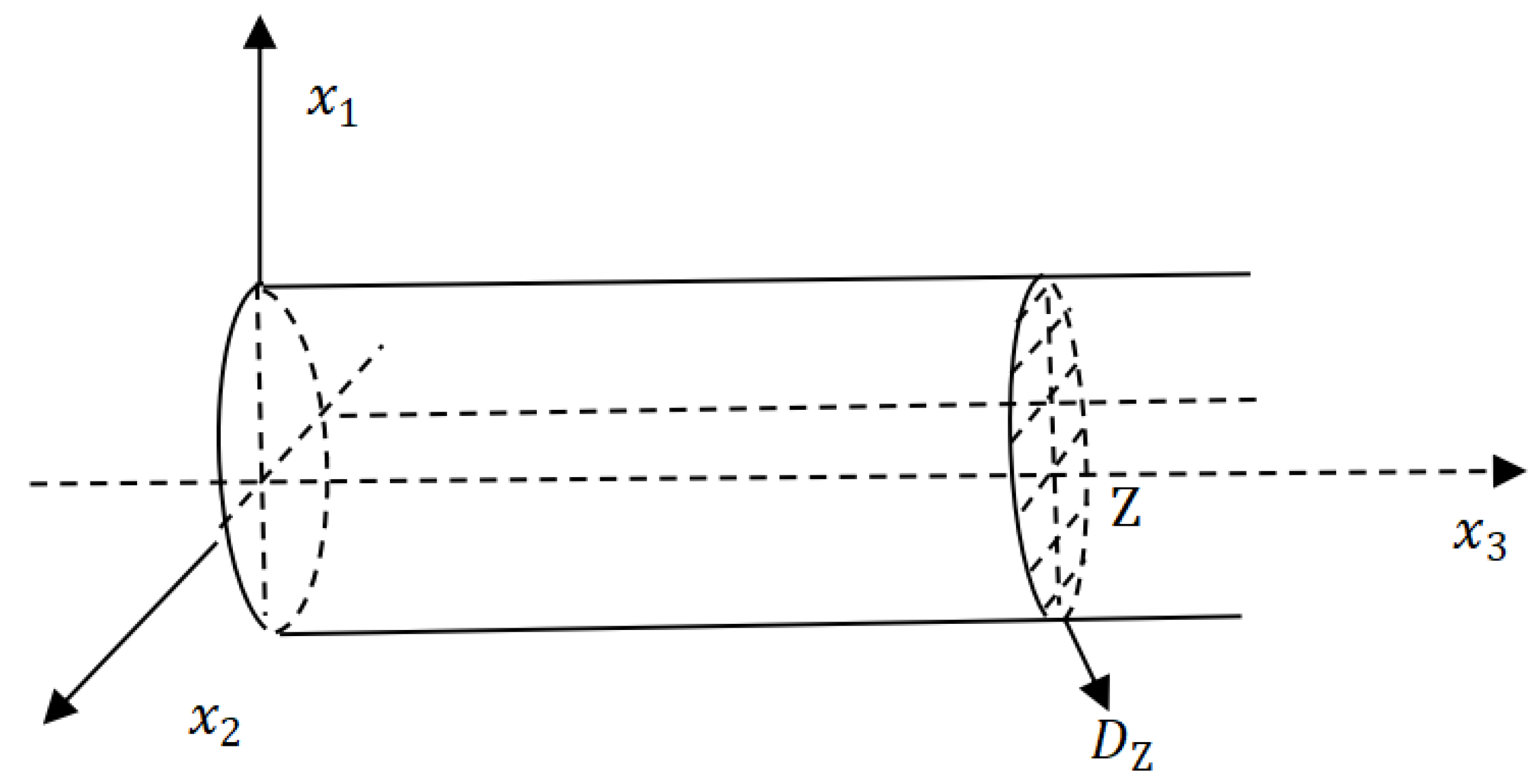
where -plane, and D is bounded (see Figure 1). We also require that D has a smooth boundary .
Let and denote the velocity, the pressure, and viscoelastic variables of the fluid, respectively. These variables satisfy the following Oldroyd fluid equations
In (1)–(4) and the following, we use commas for derivation, repeated English subscripts for summation from 1 to 3, and repeated Greek subscripts for summation from 1 to 2, e.g., and .
On the boundary, Equations (1)–(4) satisfy
where and are given functions, and and are positive constants.
Because viscoelastic fluid is widely used in real life, this type of fluid has attracted more and more attention. The Oldroyd fluid Equations (1)–(3) are not only clearly recorded in [2], but also discussed in [1]. Meanwhile, Oskolkov and Shadiev [2] and Christov and Jordan [3] have proved the existence of the solution to Equations (1)–(3) under different conditions. In the context of industrial and engineering applications, Oldroyd fluids always pass through a cylinder. Therefore, it is necessary to study the properties and continuous dependence of solutions to Oldroyd fluids on a cylinder.
The first purpose of the present paper is to study the spatial decay results of the solutions to Equations (1)–(4) when . In fact, Keiller [4] studied the spatial decay of steady perturbations of plane Poiseuille flow for the Oldroyd-B equations as . For such a type of study, one can also see [5]. After the earlier work of Boley [6], the spatial decay results of fluid equations with spatial variables in a cylinder, which can be thought of as decay results of the Saint-Venant type, have been paid full attention. For more of such Saint-Venant type results, one can see [7,8,9,10,11,12,13,14,15,16]. Compared with references [4,5], the innovation of this paper is the use of the methods of references [9,11] to further extend the attenuation results to a semi-infinite cylinder. We demonstrate that the solution decays exponentially on the semi-infinite cylinder, indicating that the velocity and viscoelastic variables of the fluid decay exponentially with distance from the finite end to the infinite. This is the first result that we establish in the present paper.
The second purpose is to study the continuous dependence of the solutions to Equations (1)–(4) on the viscosity coefficient. When a small disturbance occurs in the viscosity coefficient, we study what kind of disturbance will occur in the solutions of the equation. In past decades, studies on structural stability have received a lot of attention, and a large number of papers have emerged, including those of Liu and Zheng [17], Avalos and Lesiecka [18], Meyvacı [19], Quintanilla [1,20,21], Liu et al. [22,23,24,25,26], Hameed and Harfash [27], Scott et al. [28,29], Li et al. [30,31,32,33], Ciarletta and Straughan [34], and Franchi and Straughan [35]. Straughan [1] proved that Kelvin–Voigt fluid depended continuously on the coefficients of the fluid. Research results have been focused on bounded regions in both two-dimensional and three-dimensional spaces.
In fact, the study of structural stability in the cylindrical region is equally important. Due to its widespread application in practice, it has gradually begun to receive attention (see [36,37,38]). This paper will continue the research in this field. We want to extend the results of [1] to the case of the semi-infinite cylinder. Taking the viscosity coefficient as an example, we demonstrate how to derive the continuous dependence results of the solutions on the other coefficients in Equations (1)–(4). In this process, we adopted methods of energy estimation and prior estimates.
2. The Main Theorems
We first list some lemmas.
Lemma 1
Lemma 2
This lemma in the case of two dimensions has been established by [40].
We consider the identity
where . By using the divergence theorem and (5), (8), we have
where ω is a positive constant.
By (2), we have the following identity:
From (11), it follows that
Based on the energy function , we can obtain the spatial decay theorem.
Theorem 1.
3. The Proof of Theorem 1
In this section, we first state some lemmas that are related to (1)–(8). Using these lemmas, we can obtain Theorem 1.
Proof.
From (13), we also have
Next, we bound each in terms of . By Hölder’s and Young’s inequalities, we have
Next, we will bound . To do this, we note that
In view of we have . Through using Lemma 2, such that
Therefore, we have
Using the Schwarz inequality and Lemmas 1 and 2, we have
We also need the bound of . Therefore, we bound using known data. □
Lemma 4.
Proof.
We let in Lemma 3, and then we can have
Therefore, to bound , it is necessary to seek a bound for . In (23), by choosing , we have
From (14), we have
Now, we let denote
where is a positive constant, and .
Using Equation (1) and the divergence theorem, we have
Combining Hölder’s inequality and Young’s inequality again, we obtain
Since
we have
From Lemma 3, it follows that
Combining (50) and Lemma 4, we can obtain Theorem 1. □
4. The Proof of Theorem 2
From Theorem 1, we have the following result
From Lemma 4, it can be followed that
We let denote
We begin with
Now, we let
It follows from (57) that
where is a positive constant.
In view of Hölder’s and Young’s inequalities, we obtain
Inserting the above inequalities into (56) and choosing , we obtain
Now, we choose in (65) to obtain
From (68), we have
From (60), we obtain
5. Conclusions
In this article, we used energy estimations and prior estimations to obtain the properties and structural stability of the solution on a cylinder. This can also provide reference for further research on other fluid equation systems.
Funding
This research was funded by the Research team project of Guangzhou Huashang College (2021HSKT01).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data was created in the manuscript.
Acknowledgments
The author would like to deeply thank all the reviewers for their insightful and constructive comments.
Conflicts of Interest
The author declares no conflicts of interest.
References and Note
- Straughan, B. Continuous dependence and convergence for a Kelvin-Voigt fluid of order one. Annaidell Univ. Diferrara 2022, 68, 49–61. [Google Scholar] [CrossRef]
- Oskolkov, A.P.; Shadiev, R. Towards a theory of global solvability on [0,∞) of initial-boundary value problems for the equations of motion of Oldroyd and Kelvin-Voigt fluids. J. Math. Sci. 1994, 68, 240–253. [Google Scholar] [CrossRef]
- Christov, I.C.; Jordan, P.M. Maxwell’s “Other” Equations; The Royal Society, Blog: London, UK, 2015. [Google Scholar]
- Keiller, R.A. Spatial decay of steady perturbations of plane Poiseuille flow for the Oldroyd-B equation. J. Non-Newton. Fluid Mech. 1993, 46, 129–142. [Google Scholar] [CrossRef]
- Lozinski, A.; Owens, R.G. An energy estimate for the Oldroyd B model: Theory and applications. J. Non-Newton. Fluid Mech. 2003, 112, 161–176. [Google Scholar] [CrossRef]
- Boley, B. Some observations on Saint-Venant’s principle. Proc. 3rd U.S. Nat. Con 9. Appl. Mech. ASME 1958, 259–264. [Google Scholar]
- Payne, L.E.; Song, J.C. Spatial decay estimates for the Brinkman and Darcy flows in a semi-infinite cylinder. Contin. Mech. Thermodyn. 1997, 9, 175–190. [Google Scholar] [CrossRef]
- Li, Y.F.; Xiao, S.Z.; Chen, X.J. Spatial alternative and stability of type III Thermoelastic equations. Appl. Math. Mech. 2021, 42, 431–440. [Google Scholar]
- Li, Y.F.; Lin, C.H. Spatial Decay for Solutions to 2-D Boussinesq System with Variable Thermal Diffusivity. Acta Appl. Math. 2018, 154, 111–130. [Google Scholar] [CrossRef]
- Quintanilla, R. Some remarks on the fast spatial growth/decay in exterior regions. Z. Angew. Math. Phys. 2019, 70, 83. [Google Scholar] [CrossRef]
- Quintanilla, R.; Racke, R. Spatial behavior in phase-lag heat conduction. Differ. Integral Equ. 2015, 28, 291–308. [Google Scholar] [CrossRef]
- Knops, R.J.; Quintanilla, R. Spatial behaviour in thermoelastostatic cylinders of indefinitely increasing cross-section. J. Elast. 2015, 121, 89–117. [Google Scholar] [CrossRef]
- Knops, R.J.; Quintanilla, R. Spatial decay in transient heat conduction for general elongated regions. Q. Appl. Math. 2018, 76, 611–625. [Google Scholar] [CrossRef]
- Chen, W.H. Cauchy problem for thermoelastic plate equations with different damping mechanisms. Commun. Math. Sci. 2020, 18, 429–457. [Google Scholar] [CrossRef]
- Chen, W.H. Decay properties and asymptotic profiles for elastic waves with Kelvin-Voigt damping in 2D. Asymptot. Anal. 2020, 117, 113–140. [Google Scholar] [CrossRef]
- Bofill, F.; Quintanilla, R. Spatial estimates for dynamical problems in several elasticity theories. Richerche Mat. 1998, 46, 425–441. [Google Scholar]
- Liu, Z.; Zheng, S. Exponential stability of the Kirchhoff plate with thermal or viscoelastic damping. Q. Appl. Math. 1997, 3, 551–564. [Google Scholar] [CrossRef]
- Avalos, G.; Lesiecka, I. Exponential stability of an uncontrolled thermoelastic system with varying boundary conditions. Appl. Anal. 1998, 68, 31–49. [Google Scholar]
- Meyvacı, M. Structural stability for a linear system of thermoelastic plate equations. Appl. Math. Comput. 2014, 242, 664–668. [Google Scholar] [CrossRef]
- Quintanilla, R. Convergence and structural stability in thermoelasticity. Appl. Math. Comput. 2003, 135, 287–300. [Google Scholar] [CrossRef]
- Quintanilla, R. Structural stability and continuous dependence of solutions in thermoelasticity of type III. Discret. Contin. Dyn. Syst. B 2001, 1, 463–470. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, Y.W.; Li, Y.F. Convergence result for the thermoelasticity of type III. Appl. Math. Lett. 2013, 26, 97–102. [Google Scholar] [CrossRef]
- Liu, Y. Continuous dependence for a thermal convection model with temperature-dependent solubitity. Appl. Math. Comput. 2017, 308, 18–30. [Google Scholar]
- Liu, Y.; Xiao, S.Z.; Lin, Y.W. Continuous dependence for the Brinkman-Forchheimer fluid interfacing with a Darcy fluid in a bounded domain. Math. Comput. Simul. 2018, 150, 66–82. [Google Scholar] [CrossRef]
- Shi, J.C.; Liu, Y. Structural stability for the Forchheimer equations interfacing with a Darcy fluid in a bounded region in R3. Bound. Value Probl. 2021, 46. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, X.L.; Shi, J.C.; Zhi, W.J. Structural stability of the Boussinesq fluid interfacing with a Darcy fluid in a bounded region in R2. Appl. Math. Comput. 2021, 411, 126488. [Google Scholar]
- Hameed, A.A.; Harfash, A.J. Continuous dependence of double diffusive convection in a porous medium with temperature-dependent density. Basrah J. Sci. 2019, 37, 1–15. [Google Scholar]
- Scott, N.L. Continuous dependence on boundary reaction terms in a porous mediu od Darcy type. J. Math. Anal. Appl. 2013, 399, 667–675. [Google Scholar] [CrossRef]
- Scott, N.L.; Straughan, B. Continuous dependence on the reaction terms in porous convection with surface reactions. Q. Appl. Math. 2013, 71, 501–508. [Google Scholar] [CrossRef]
- Li, Y.F.; Zeng, P. Continuous dependence on the heat source of 2D large-scale primitive equations in oceanic dynamics. Symmetry 2021, 13, 1961. [Google Scholar] [CrossRef]
- Li, Y.F.; Chen, X.J.; Shi, J.C. Structural stability in resonant penetrative convection in a Brinkman-Forchheimer fluid interfacing with a Darcy fluid. Appl. Math. Optim. 2021, 84, 979–999. [Google Scholar] [CrossRef]
- Li, Y.F.; Xiao, S.Z.; Zeng, P. The applications of some basic mathematical inequalities on the convergence of the primitive equations of moist atmosphere. J. Math. Inequalities 2021, 15, 293–304. [Google Scholar] [CrossRef]
- Li, Y.F.; Xiao, S.Z. Continuous dependence of 2D large scale primitive equtions on the boundary conditions. Appl. Math. 2022, 67, 103–124. [Google Scholar] [CrossRef]
- Ciarletta, M.; Straughan, B.; Tibullo, V. Structural stability for a thermal convection model with temperature-dependent solubility. Nonlinear Anal. Real World Appl. 2015, 22, 34–43. [Google Scholar] [CrossRef]
- Franchi, F.; Straughan, B. Continuous dependence and decay for the Forchheimer equations. Proc. R. Soc. Lond. A 2003, 459, 3195–3202. [Google Scholar] [CrossRef]
- Song, J.C.; Yoon, D.S. Phragmén-Lindelöf type and continuous dependence results in generalized dissipative heat conduction. J. Korean Math. Soc. 1998, 35, 945–960. [Google Scholar]
- Song, J.C. Phragmén—Lindelöf and continuous dependence type results in a Stokes flow. Appl. Math. Mech. 2010, 31, 875–882. [Google Scholar] [CrossRef]
- Li, Y.F.; Lin, C. Continuous dependence for the nonhomogeneous Brinkman-Forchheimer equations in a semi-infinite pipe. Appl. Math. Comput. 2014, 244, 201–208. [Google Scholar] [CrossRef]
- Ladyzhenskaya, O.A.; Solonnikov, V.A. Some problems of vector analysis and generalized formulations of boundary-value problems for the Navier-Stokes equations. Russ. Math. Surv. 1973, 28, 43–82. [Google Scholar] [CrossRef]
- Babuǒska, I.; Aziz, A.K. Survey lectures on the mathematical foundations of the finite element method. In The Mathematical Foundations of the Finite Element Method with Applications to Partial Differential Equations (Proc. Sympos., Univ. Maryland, Baltimore, Md., 1972); Academic Press: New York, NY, USA, 1972; pp. 1–359. [Google Scholar]
Figure 1.
Cylindrical pipe R.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, Y. Spatial Decay Estimates and Continuous Dependence for the Oldroyd Fluid. Mathematics 2024, 12, 1240. https://doi.org/10.3390/math12081240
AMA Style
Li Y. Spatial Decay Estimates and Continuous Dependence for the Oldroyd Fluid. Mathematics. 2024; 12(8):1240. https://doi.org/10.3390/math12081240
Chicago/Turabian StyleLi, Yuanfei. 2024. "Spatial Decay Estimates and Continuous Dependence for the Oldroyd Fluid" Mathematics 12, no. 8: 1240. https://doi.org/10.3390/math12081240
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.