
Risk Analysis of the Use of Drones in City Logistics


1
Logistics Department, Faculty of Transport and Traffic Engineering, University of Belgrade, Vojvode Stepe 305, 11000 Belgrade, Serbia
2
Department of Economic Sciences, University of Salento, 73100 Lecce, Italy
3
Air Transport Department, Faculty of Transport and Traffic Engineering, University of Belgrade, Vojvode Stepe 305, 11000 Belgrade, Serbia
*
Author to whom correspondence should be addressed.
Mathematics 2024, 12(8), 1250; https://doi.org/10.3390/math12081250
Submission received: 29 March 2024
/
Revised: 17 April 2024
/
Accepted: 18 April 2024
/
Published: 20 April 2024
(This article belongs to the Special Issue Fuzzy Logic Applications in Traffic and Transportation Engineering)
Abstract
:Drone delivery in city logistics is gaining attention due to road congestion, environmental threats, etc. However, there are risks associated with using drones which can result in hazardous events, such as conflicts in the air, loss of control, and system failures. It is crucial to assess the risks involved in using different types of drones and choose the option with the lowest risk. The existence of different criteria important for this decision imposes the need to apply the multi-criteria decision-making (MCDM) method(s). This paper proposes a new hybrid model that combines the fuzzy Factor Relationship (FARE) method for obtaining the criteria weights and the Axial Distance-based Aggregated Measurement (ADAM) method for obtaining the final ranking of the alternatives. A single-rotor microdrone weighing up to 4.4 lb was chosen as the optimal solution, and after that, the most favorable are also the drones of this size (multi-rotor and fixed-wing microdrones). The establishment of a novel hybrid MCDM model, the identified risks, the set of criteria for evaluating the least risky drones, and the framework for prioritizing the drones are the main novelties and contributions of the paper.
1. Introduction
The central area of the city has the biggest logistics problems. Although it takes up a relatively small space, a significant portion of the population lives here, and there are many jobs. The majority of logistics flows come from small businesses in the trade, service, and catering industries. The historical parts of the city present an additional challenge due to their inherited infrastructure. Streets are often narrow and meant for specific types of traffic, such as pedestrian zones, making it difficult for urban facilities to function efficiently. The transport infrastructure is overloaded and expansion possibilities are limited by a lack of space. To improve the quality of service and create efficient, safe, and environmentally friendly logistics systems, various city logistics initiatives have been introduced. These initiatives aim to improve the city’s attractiveness and quality of life. One such initiative is the use of drones [1].
Drones for delivering packages have become increasingly popular due to the rise of e-commerce and home delivery services. It is estimated that the number of packages delivered by drones worldwide will increase from 220 to 262 billion by 2026 [2].
Considering drones, deliveries to users in various market niches are of the highest interest for city logistics. Retail and e-commerce companies, the fresh food/meal industry, and the hospitality industry are beginning to implement drones for product delivery [3]. Additionally, courier, express, package, or postal services use drones for delivery to customers. Finally, drones are also used to deliver medical supplies to hospitals or patients’ homes [3], and even to patients’ beds [4], which is of particular importance considering the necessity of providing these services promptly.
Three characteristics (strengths) that make drone delivery most suitable for city logistics are the capability to fly over traffic, environmental impact, and the ability to access various areas in various (e.g., emergency) situations [5]. By transporting goods through the air, drones can help reduce road traffic. The drones increase the speed of delivery, reduce the number of drivers and costs, and improve customer satisfaction, especially in combination with rider delivery [6]. They also require only an operator and can be equipped with devices for loading and unloading goods. This makes them ideal for delivering packages in busy urban areas, resulting in shorter delivery times, greater flexibility, and reduced environmental impact. However, there are concerns about noise pollution and underdeveloped regulations [1], as well as the safety of goods, people, and environment, and various risks. For this reason, among other aspects, the probability, consequences, and risk costs of the application of drones for delivery in urban areas are evaluated, concerning the geographical coverage [7], the use of services [8], type of risk [9], etc.
However, according to the best of the authors’ knowledge, risk assessments of the different types of drone applications in city logistics, comprehensively considering significant, diverse criteria, have not been performed so far. The heterogeneity of logistical requirements and risks generated by urban areas, the perspective of application, market development, the ever-growing offering of drones with different characteristics, and the number and variety of criteria that should be taken into account when choosing the optimal type of drone create a research gap, the bridging of which is a complex and significant undertaking. This can be undertaken most effectively by applying multi-criteria decision-making (MCDM) methods. Moreover, their applicability and effectiveness have been demonstrated in related fields, for the assessment and evaluation of concepts [10] and barriers to the application of drones in city logistics [11], strategies for overcoming these barriers [12], etc.
This paper aims to choose the least risky drone for use in city logistics from among the types of drones that differ in size and configuration. To solve the problem, a combination of fuzzy FARE and ADAM methods is used. Considering its numerous advantages (simplicity, ease of understanding, adapted nature, resistance to increasing criteria number, high intuitiveness, minimal risk of ranking changes, etc.), the ADAM [13] MCDM method is adequate for the mentioned problem. Its quality and applicability have been proven through the initial application in logistics, supply chains, and economy. Considering that the method is relatively new, its applicability, flexibility, and quality are additionally tested and validated by its applications in some other areas, by combining it with other MCDM methods, with new sets of input data, and comparing its results with the results of the other MCDM methods. Since the ADAM method requires direct entry of criteria weights, another method must be used to determine them. One of the most suitable is FARE because, compared to other methods, it has a higher accuracy of calculations and requires less expert engagement [14]. Moreover, considering that it is not easy to give precise assessments of the criteria weights, i.e., their importance for the drone use risks, it is suitable to apply the method in a fuzzy environment—fuzzy FARE.
The main novelty of the paper is the development and application of a new hybrid multi-criteria decision-making (MCDM) model that combines fuzzy FARE and ADAM methods for the first time, thus contributing to the MCDM theory. Integration of these methods offers a more robust and adaptable decision-making framework, particularly suited for complex and uncertain environments. Furthermore, the study introduces a comprehensive framework for assessing and selecting drones optimized for city logistics applications, emphasizing risk mitigation as a central goal. This framework lays the groundwork for evaluating drones within urban contexts and delineates actionable criteria for assessing their suitability, thereby fostering safer and more efficient logistics operations.
The paper is composed of seven sections. Following the introduction, the Section 2 offers an overview of the literature. The Section 3 describes the structure of the problem, different drone variants, and the criteria for their evaluation. In the Section 4, the methodology is presented, which includes a description of the methods and application steps. The Section 5 evaluates and ranks alternatives, selects the best option, and performs a sensitivity analysis of the obtained solution. The Section 6 is dedicated to discussion, whereas the Section 7 presents concluding remarks.
2. Literature Review
Whereas MCDM, city logistics, and the use of drones for delivery are popular topics in the literature, relatively few studies have utilized MCDM methods to assess delivery options using various types of drones. A thorough review of the relevant literature on these topics is crucial for successful research in this area.
2.1. Methods Applied in the Model
MCDM aids decisionmakers in assessing alternatives based on various criteria. Every month or two a new method appears, but not all of them find widespread use among researchers or practitioners [15]. Over the past few decades, a large number of MCDM methods have been developed. They are often upgraded, modified, and/or combined with other methods or approaches to optimize the decisionmaking depending on the type of problem. Usually, the goal is to exploit the advantages and suppress the disadvantages of individual methods. A model that combines the fuzzy FARE and ADAM methods for the evaluation, ranking, and selection of drones with the lowest risk for application in city logistics was developed in this study.
The FARE method was developed by Ginevicius [16]. This method establishes the connections and associations among all the elements involved in the decision-making process, including criteria and sub-criteria. The data to be examined are entered into comparison matrices. The consistency check of the comparison matrices ensures that the results will be more reliable and stable, which is a great advantage of this method [17]. FARE belongs to the group of outranking methods [16]. It is characterized by various advantages against other methods from this group (ELECTRE, PROMETHEE, KEMIRA, MABAC, and ITARA) and other groups of MCDM methods. It represents one of the most accurate MCDM methods [14]. Compared to methods that are based on pairwise comparisons (e.g., AHP), the relationships between criteria are formalized and integrated [16] and require fewer evaluations [18]. This method is based on the often subjective and uncertain decision-makers’ opinions. Therefore, a shortcoming of the method can be the reliance on the individuals’ evaluations that do not have a realistic picture of the connections between the criteria. This can be overcome by a fuzzy extension of the FARE method [19]. This modification of the method has found application mostly in combination with other methods, e.g., for the selection of optimal cold chain logistics service providers [20], candidate selection in e-voting [21], selection of logistics service providers [19], production materials [22], machine processes [23], assessment of the impact of technology transfer on the created value [24], and evaluation of cargo vehicles visibility [25].
To overcome the shortcomings of the existing methods, the ADAM method was developed as a pioneer of a new group of so-called geometric MCDM methods [13]. It is an aggregated measurement method based on axial distances. The primary strengths of the ADAM against other methods lie in its simplicity, ease of comprehension, user-friendly nature, resilience to an expanding number of criteria, high intuitiveness, and minimal risk of ranking alterations [13]. The method was applied in an unmodified form or a fuzzy environment, independently or in combination with other methods for evaluating business models based on the circular economy in supply chains [13], the evaluation of strategic alternatives for support to decisionmakers in achieving circularity goals [26], determining the drivers of e-traceability in supply chains [27], the selection of the starting point of delivery of electronically ordered goods [28], the ranking of countries based on the entrepreneurship conditions [29], evaluating Industry 4.0 technologies [30], and transshipment technologies in intermodal terminals [31]. Due to its advantages and proven applicability, it is selected in this study for solving the defined problem.
2.2. Application of Drones in City Logistics
Drones were initially used for military purposes [32,33]. Today, they are applied or tested in various operations, from recording with cameras, through functions provided by a wide range of advanced sensors, to performing physically intensive jobs. They are used indoors or outdoors, underwater, on water, on land, or in the air [33]. Most of the systems of commercial application of drones are still in an early stage, but their development opens up significant potential and opportunities for more massive applications in various fields. Some of them are [3,34] conservation, archaeology, a survey of power facilities, health care, surveillance and monitoring, retail and e-commerce, postal services and package delivery, food and hospitality industry, humanitarian logistics and emergency services, security/disaster management, and agriculture. In logistics, drones are applied for regional transport and deliveries to users, which are the main application areas, but also rescue (emergency logistics) and storage management (inventory, inspection, etc.) [35]. The growing difficulties of logistics in urban areas have fueled an increase in interest in scientific research of the drone application in CL, i.e., various challenges, solutions, initiatives, concepts, and approaches of using drones in CL [36].
Some studies examine drones as supplementary tools for ground delivery vehicles (GDVs). Referred to in papers as a tandem vehicle–drone system, this concept involves employing drones for deliveries to specific locations while GDVs simultaneously handle others [10]. Wang and Sheu [37] proposed a model for the operational planning of ground vehicle–drone tandem delivery, allowing for the interchange of drones between GDVs. Most studies have focused on drone-based delivery, but there are also studies dealing with both drone pickup and delivery [10].
In the literature, there is a distinct drone delivery approach that involves integrating drones with larger vehicles, functioning as mobile depots. Mobile depots play a crucial role in bringing goods and drones closer to the delivery zone, with the final leg of delivery exclusively handled by drones. Within the literature, these variations primarily differ based on the type of vehicle used as mobile depots, encompassing GDVs and means of public transportation like trams, barges, and even unconventional options such as balloons or dirigibles (a type of aerostat) [10].
Whereas the current literature extensively discusses diverse drone delivery models, certain aspects remain relatively unexplored. Specifically, those relying on micro-consolidation and alternative transportation modes are not thoroughly investigated. There are only a few articles that analyze different drone-based delivery variants within the framework of city logistics concepts and select the most favorable among them. One notable article [36] demonstrates that various forms of flow consolidation on the outskirts of urban areas and near flow generators, combined with drones for the final stage of delivery, present a sustainable city logistics solution [10,38,39]. The use of drones in city logistics has many advantages: reducing city road traffic and the number of vehicles on the streets, supporting humanitarian logistics, reducing delivery time, costs, carbon dioxide, and noise emissions, and increasing the flexibility and sustainability of city logistics [40,41]. In addition to the above benefits, there are also negative effects. Regulatory challenges, along with concerns related to privacy and security, emerge as critical barriers to the widespread implementation of drones in city logistics. Additionally, public perception and considerations regarding psychology, environment, technology, and economics are identified as other substantial barriers [42].
2.3. Risk Analysis in Drone Delivery Logistics
Risk analysis can be broken down into several stages [43]: risk management, determining the likelihood of risk occurrence, assessing the severity of risk consequences, determining whether the risk is acceptable, and implementing risk control/mitigation measures. Risk analysis is used to solve many problems, in different fields, for example, meta-analysis of the risk of hypertension in living kidney donors [44], analysis of the impact of lightning strikes on flight safety [45], and risk analysis in engineering and economics [46].
Logistic systems occasionally face disruptions that represent a significant challenge for normal operations. These disruptions were particularly evident during the COVID-19 virus pandemic when the need to deliver products directly to consumers (food, masks, vaccines, etc.) was additionally created [47]. Therefore, in recent years, many studies have indicated the importance of risk management in logistics [48] and focus on creating strategies to improve reliability and risk management in logistics [49].
The reliability of logistics systems, i.e., the creation of risks, is influenced by numerous external (production, demand, globalization, terrorist attacks, thefts, natural disasters, etc.) and internal factors (human: decisions and behavior of employees, character, professional approach, etc.; and technical factors) [48,50,51].
Businesses involved in supply chains and logistics are anticipated to recognize, evaluate, mitigate, and effectively address risks [52]. It is important to carry out risk categorization. According to [53], risk categorization in logistics can be undertaken based on three perspectives: risk sources, risk amplifiers/absorbers, and risk releasers.
Growing apprehension surrounds the risks associated with natural disasters, such as tsunamis, fires, earthquakes, floods, and snowfalls; the threats posed by man-made accidents; and terrorism. Whereas these risks should be acknowledged and evaluated within the realm of city logistics, their full consideration is lacking in both the modeling of city logistics [54] and the implementation of city logistics schemes in urban areas.
Risks stemming from natural and anthropogenic hazards within the city logistics system vary in terms of frequency of occurrence, complexity, uncertainty, and ambiguity [55]. Typically, the focus lies on daily risks, such as potential delays in reaching customers for delivery or goods collection due to common occurrences like traffic jams, accidents, or events like sports gatherings. However, it is necessary to include rare but serious effects caused by cyclones, earthquakes, floods, etc. [55].
The main sources of risk in the application of delivery drones work at low altitudes (danger of collision, fall, injury, etc.), propeller work (noise, the anxiety of people, etc.), and cameras (possibility of endangering privacy) [56]. Risks can relate to three parties: people and property directly related to drone operations, people and property that have nothing to do with drone operations but directly benefit from them, and people and property that are not involved in drone operations and do not directly benefit from them.
The identification of the main risks in drone operations is based on the following categories [43]: conflict in the air (risk of a collision between a drone and another aircraft and similar events, as well as loss of connection with the air traffic control service provider); loss of control (risk of injury to people on the ground depending on the flight plan and maneuvering of the drone itself after a technical malfunction); system failures (engine, control system, software, electrical system failures, etc.); and conflicts with third parties and property damage (accidental impact of the drone on a person or property damage). Barr et al. [57] successfully leveraged information gleaned from numerous drone accident reports to provide an initial risk assessment for small drones.
3. Problem Description
Drones can be classified based on wingspan, wing load, maximum height, speed, configuration, flight-enabling technology, engine type, level of autonomy, size, weight, range and endurance, applications, manufacturing costs, etc. [33]. The classification criteria that will be considered in this paper are size and configuration.
There are drones of various sizes, spanning from dimensions comparable to that of an insect to those matching a commercial aircraft [58]. Drones of smaller dimensions are of particular importance for deliveries (Table 1), which will also be discussed in this paper.
According to the configuration, there are three types of drones, which will be described below: fixed-wing drones, and multi-rotor and single-rotor drones. Multirotor drones are the simplest form of drones. They usually use at least four rotors, do not need a landing strip, are not noisy, and can hover in the air [58]. The disadvantage of such drones is lower endurance (shorter flight time and low payload) and speed [59].
The disadvantage of such drones is lower endurance (shorter flight time and low payload) and speed [59]. Fixed, static-wing drones use a wing-like structure (similar to airplanes) for their operation, and the way they take off is different than in the case of other drones [59]. They have greater endurance (they are more suitable for longer distances and can carry up to 110.2 lb) and speed than multi-rotor drones, but they require more space for take-off and balancing, proper training of the operator, high costs, and cannot hover in place [33]. Unlike multi-rotor drones where a sudden loss of power can cause them to stop working, fixed-wing drones can recover in such situations and continue flying [33]. In such drones, fixed wings can be combined with one or more rotors. Single-rotor drones are provided with greater durability by a throttle control system, and larger rotor blades provide greater system efficiency, but as with fixed-wing drones, they require operator training and high costs [59].
By combining the two mentioned classifications, nine alternatives (variants) were defined, i.e., types of drones: D1—fixed-wing microdrone, D2—multi-rotor microdrone, D3—single-rotor microdrone, D4—fixed-wing mini drone, D5—multirotor mini drone, D6—single-rotor mini drone, D7—small fixed-wing drone, D8—multirotor small drone, D9—single-rotor small drone.
The criteria, according to which the listed variants will be evaluated and the most favorable of them selected from the aspect of risk, are defined as the possibility of occurrence of certain unwanted events [57]: loss of control, leaving the intended flight zone, loss of communication, loss of navigation, unsuccessful landing, unintentional termination of flight, inability to avoid collision with terrain/moving obstacles.
The first criterion according to which the alternatives will be evaluated is the possibility of losing control of the drone (C1). The most common reason for losing control of a drone is operator error, but loss of control can occur for other reasons: too high speed, flying indoors, engine problems, wind gusts, other weather conditions, flying obstacles, etc. Drones should also be evaluated from the aspect of the possibility of leaving the intended flight zone (C2). This phenomenon is prevented by the use of geofencing, i.e., by setting virtual borders to limit the operation of drones in a certain zone, thereby preventing unauthorized entry into the air proctor [60]. Loss of communication with the drone (C3) occurs more often in remote and rural areas, with low demand density, during manual control by the operator, and the consequences of this event can be collisions with other aircraft, objects, injuries to people, etc. [57]. In case of loss of navigation (C4), the drone also poses a danger to the environment. Based on one or more global navigation satellite systems, autonomous navigation control is performed, which helps the drone to move without human control and to minimize the drone’s flight time [61]. Unsuccessful landing (C5) represents inadequate contact with the runway or a crash during landing, which can cause the vehicle to break, catch fire, injure people, etc. [57]. Unintended or unsuccessful flight disruption (C6) may occur during delivery and its consequences such as fire may endanger people, the environment, etc. The final criterion is the inability to avoid collisions with terrain, or fixed or moving obstacles (C7), such as buildings, infrastructure, means of transport, people, animals, etc. It is also an important criterion against which any alternative should be evaluated.
4. Methodology
To solve the problem, i.e., the selection of the least risky drone, a combined model was used that implies the application of two MCDM methods, one for determining the weight of the criteria (fuzzy FARE), and the other for evaluating and obtaining the final ranking of alternatives (ADAM) (Figure 1).
The model comprises the following sequential phases:
Phase 1: Defining the structure of the problem. The sets of alternatives and criteria for their evaluation (shown in the previous section)need to be established.
Phase 2: Defining a scale for evaluating criteria and alternatives. Decisionmakers describe the importance of criteria and alternatives using linguistic ratings that can be transformed into numerical values or triangular fuzzy numbers (TFNs) as shown in Table 2. The evaluation of criteria depends to a greater extent on the subjective ratings of decisionmakers, in contrast to the evaluations of the alternative, which are based more on the concrete characteristics of the alternative about the criteria; fuzzy evaluations were used to evaluate the criteria, that is, to apply the fuzzy FARE method, whereas ordinary numerical values were used to rank the alternative by changing the ADAM method.
Phase 3: Obtaining weights of criteria.
Phase 3.1: Creating the criteria evaluation matrix . Decisionmakers’ linguistic assessments are converted into TFNs by applying the relationships specified in Table 2.
where =(l, m, n) is the evaluation of the importance of criterion i over criterion j. Items l, m, and u are the lower, middle, and upper values of the TFNs. Item n is the number of criteria taken into account. When forming the matrix , the following applies:
and the evaluation is considered consistent if:
Phase 3.2: Obtaining the potential criteria impact as:
where H is the highest value of the scale used for the evaluations.
Phase 3.3: Obtaining the total impact (importance) of criterion j as:
Phase 3.4: Obtaining the final fuzzy criteria weights:
where PH is the total potential importance of criteria obtained as:
where Pj is the real total impact of the criterion j obtained as:
Phase 4: Evaluation of alternatives. The ADAM method is used to evaluate alternatives according to criteria.
Phase 4.1: Defining the decision matrix E, elements of which are evaluations eqj of the alternatives q regarding criteria j, i.e., vector magnitudes that correspond to the evaluations of the alternatives regarding the criteria:
where m is the total number of alternatives and n is the total number of criteria.
Phase 4.2: Defining the sorted decision matrix S elements, which are sqj, indicating the sorted evaluations eqj in descending order according to the importance (weight) of the criterion:
Phase 4.3: Defining the normalized sorted matrix N elements, which are normalized evaluations nqj obtained as:
where B is the set of benefits and C is the set of cost criteria.
Phase 4.4: Finding the coordinates (x, y, z) of the reference (Rqj) and weighted reference (Pqj) points that define the complex polyhedron in the following way:
where αj is the angle that determines the direction of the vector that defines the value of the alternative, which is obtained as:
Phase 4.5: Finding the volumes of complex polyhedra as the sum of the volumes of the pyramids of which it is composed using the following equation:
where Vk is the volume of the pyramid obtained by applying the following equation:
where is the surface of the base of the pyramid defined by the reference and weighted reference points of two consecutive criteria and is obtained by applying the following equation:
where is the Euclidean distance between the reference points of two consecutive criteria, which is obtained by applying the following equation:
and are the magnitudes of the vectors corresponding to the weights of two consecutive criteria, that is:
is the height of the pyramid from the defined base to the top of the pyramid located in the coordinate origin (O) and is obtained by applying the following equation:
where is the semicircumference of the triangle defined by the x and y coordinates of two consecutive criteria and the coordinate origin and is obtained as:
where are the Euclidean distances of the reference points of two consecutive criteria from the coordinate origin, obtained as:
Phase 5: Ranking the alternatives according to the decreasing values of the volumes of complex polyhedra . The best alternative is the one with the highest volume value.
Evaluation and ranking of alternatives are performed using the software ADAM 1.2-beta, http://adam-mcdm.com/ (accessed on 19 March 2024).
5. Risk Assessment and Ranking
The methods described were applied to obtain results, which are presented below. Additionally, to examine the stability of the solution, an analysis of the methods’ sensitivity to changes in criteria weights through multiple iterations is also reported.
The fuzzy FARE method was used to obtain the comparison scores of the criteria (Table 3), and their weights were then normalized (Table 4).
To define the evaluations of the alternatives according to the criteria, it was first necessary to form a focus group and interview the members. This consisted of 29 experts with different scientific/professional interests (city logistics, drones/air transport, risk analysis/management) (Table 5).
Based on the risk assessment for smaller drones [57] and the subjective opinion of decisionmakers (focus group), the alternatives were evaluated according to the criteria (Table 6). The normalized weights of the criteria together with the normalized scores of the alternatives per criteria (Table 6) were given to the ADAM 1.2-beta software.
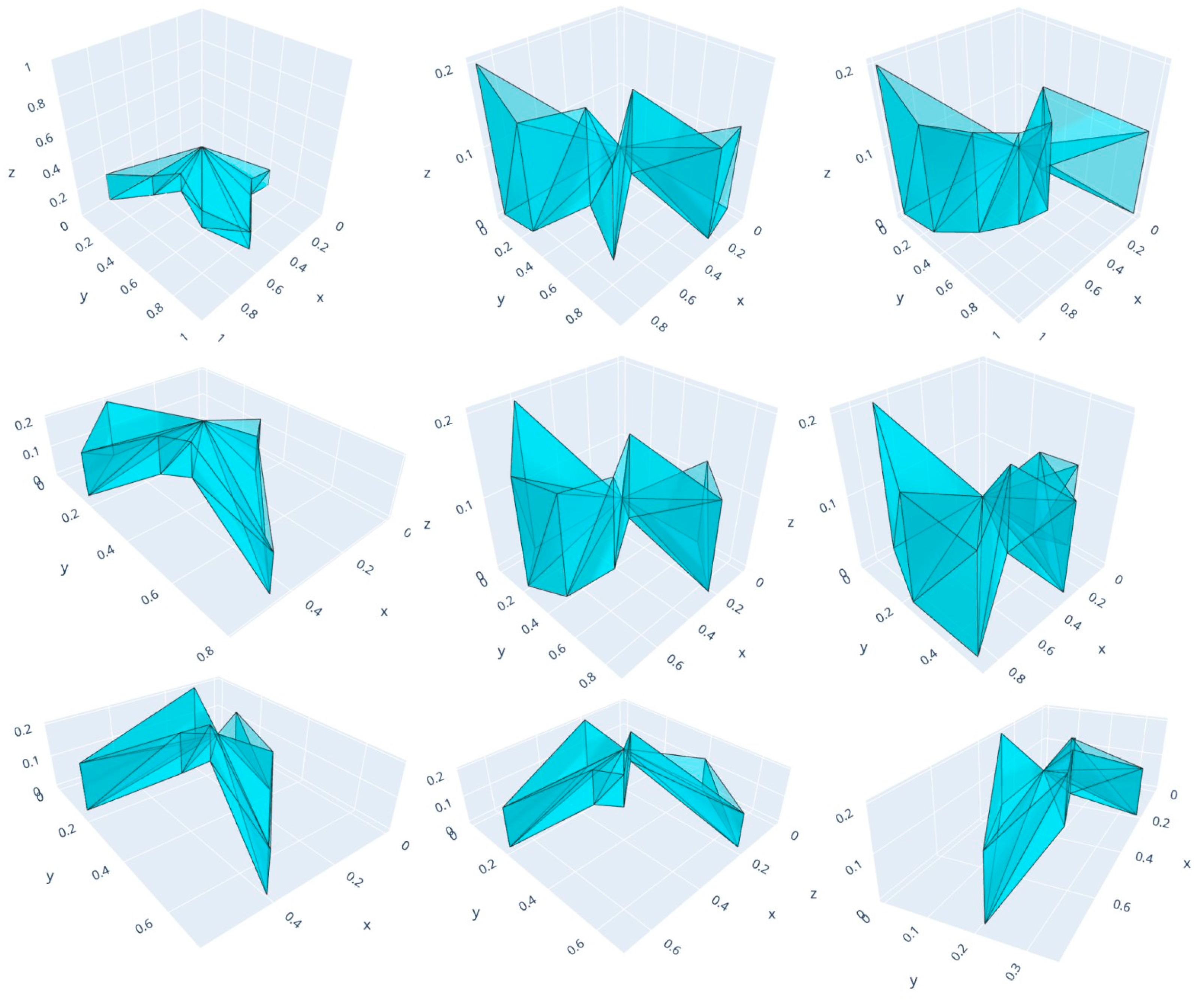
As a result, the software provides numerical values and ranking of alternatives (Table 7), as well as a graphical display of obtained complex polyhedra corresponding to each of the alternatives.
The obtained complex polyhedra of drone alternatives used for their ranking are shown in Figure 2.
Based on the ranking of alternatives, the final solution to the problem is obtained. The best-ranked alternative is the A3 alternative, which means that the least risky drone for use in city logistics is a single-rotor microdrone, which is expected given the characteristics of this aircraft.
To ensure the reliability of the solution, 10 scenarios were implemented in which the weights of the criteria were reduced. First, the weight of all criteria was reduced by 15%, then by 30%, 45%, 60%, 75%, 90%, and finally by 100%. Following that, the weight of criteria C1, C7, and C5 was reduced. The obtained rankings for all scenarios are presented in Table 8 and Figure 3. Additionally, Spearman’s correlation coefficient (SCC) was calculated to determine the correlation between the initial and other scenarios.
Given that a large number of MCDM methods have been developed in recent decades, which can provide different solutions when making the same decisions, the results obtained by applying the ADAM method within the defined model for the basic scenario (Sc.0) were compared with the results of applying the TOPSIS, VIKOR, SAW, COPRAS, AHP, and COBRA methods for identical problem and input data. The obtained ranking and SCCs for cases of application of all listed methods compared to the results obtained with the ADAM method are shown in Table 9 and Figure 4. The average value of SCCs for all methods is 0.969, which confirms the high degree of correlation in the results between the ADAM method and other methods and the validity of the defined model.
6. Discussion
The model’s limitations stem from the shortcomings of the methods used to create it. The recently developed ADAM method requires the direct input of criteria weights. Consequently, in scenarios involving complex interdependencies among criteria, it becomes impractical to independently derive weights. To address this, it is recommended to extend the ADAM method with other approaches [13]. Conversely, the fuzzy FARE method heavily depends on subjective assessments, introducing a potential for unreliability and bias. Additionally, the method proves unsuitable for a substantial number of criteria due to its protracted application process, making it challenging for decisionmakers to facilitate comparisons effectively [13]. Moreover, a notable limitation of the model is its failure to explicitly consider the unique requirements and objectives of various stakeholders during the decision-making process. The decision is made by an individual who can influence the solution of the problem he is dealing with to be in his favor.
The work presented in this study has significant theoretical implications for the fields of MCDM theory, air traffic, logistics, and risk management. The study introduces a new MCDM method, a hybrid model that can be applied to any research field. However, specific adjustments are necessary for criteria, interest groups, and evaluation scales to solve a particular problem. This study can be a starting point for new studies that define and analyze ecologically based models. For example, it can be used to determine which aircraft poses the most risk for traffic and transport in terms of environmental pollution from exhaust gases. Moreover, this method can be used to address numerous problems in traffic and logistics, economy, management, and other areas [13]. Regarding practical implications, the developed model can be used as a tool for decisionmakers, managers, planners, designers, and policymakers at different levels while dealing with problems involving many alternatives and criteria in any field. The ADAM method allows for an effective display of results, making it particularly suitable for managers. On the other hand, the fuzzy FARE method can benefit decisionmakers in companies, firms, and other institutions in employment, purchasing goods, investing in business, etc. [13].
7. Conclusions
The focus of this study was on analyzing the risks associated with using various types of drones in city logistics. The primary objective was to identify the least risky type of drone. To achieve this goal, a hybrid model combining two MCDM methods—fuzzy FARE and ADAM—was employed to evaluate the different types of drones. This model was designed to address the limitations of using these methods individually. Following the evaluation of nine alternatives based on seven criteria, the single-rotor microdrone, weighing up to 4.4 lb, also known as alternative D3, was found to be the least risky option.
The application of this hybrid model, in addition to in the field of transport and logistics, can help in the fields of environmental protection, management, economy, new technologies in companies, agriculture, food and chemicals, etc. In future research, the model can be applied to solve other problems in the areas covered by this study. The model holds potential for application in addressing additional challenges within the domains explored in this study. Furthermore, it may find utility in resolving analogous issues within intermodal transport and other areas of logistics. A crucial direction of future research, i.e., upgrading the model, is the incorporation of interest groups in the decision-making process. Some areas of application of drones in logistics have not yet been sufficiently considered. Thus, although the topic of the application of drones for delivery in urban areas has been largely discussed in the literature, the characteristics, challenges, and problems of application in rural areas have not received adequate attention, and represent a potential area of application of models similar to the one defined in this paper.
Author Contributions
Conceptualization, S.T., M.K., M.V., O.Č. and M.M.; methodology, S.T., M.K., M.V., O.Č. and M.M.; software, M.K. and M.M.; validation, S.T., M.K., M.V., O.Č. and M.M.; formal analysis, S.T., M.K., M.V., O.Č. and M.M., writing—original draft preparation, S.T., M.K., M.V. and M.M.; writing—review and editing, S.T., M.K., M.V. and O.Č.; visualization, S.T., M.K. and M.V.; supervision, S.T., M.K. and O.Č. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tadić, S.R. City Logistics Initiatives for Central Urban Zones. Tehnika 2019, 74, 585–594. [Google Scholar] [CrossRef]
- Benarbia, T.; Kyamakya, K. A Literature Review of Drone-Based Package Delivery Logistics Systems and Their Implementation Feasibility. Sustainability 2021, 14, 360. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research Avenues for Drone-Based Models in Logistics: A Classification and Review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Vlahović, N.; Knežević, B.; Batalić, P. Implementing Delivery Drones in Logistics Business Process: Case of Pharmaceutical Industry. Int. J. Mech. Ind. Eng. 2017, 10, 4026–4031. [Google Scholar]
- Roca-Riu, M.; Menendez, M. Logistic Deliveries with Drones: State of the Art of Practice and Research. In Proceedings of the 19th Swiss Transport Research Conference (STRC 2019), Monte Verità, Ascona, Switzerland, 15–17 May 2019. [Google Scholar]
- Lu, F.; Jiang, R.; Bi, H.; Gao, Z. Order Distribution and Routing Optimization for Takeout Delivery under Drone–Rider Joint Delivery Mode. J. Theor. Appl. Electron. Commer. Res. 2024, 19, 774–796. [Google Scholar] [CrossRef]
- Aurambout, J.P.; Gkoumas, K.; Ciuffo, B. Last mile delivery by drones: An estimation of viable market potential and access to citizens across European cities. Eur. Transp. Res. Rev. 2019, 11, 1–21. [Google Scholar] [CrossRef]
- Shao, Q.; Li, J.; Li, R.; Zhang, J.; Gao, X. Study of Urban Logistics Drone Path Planning Model Incorporating Service Benefit and Risk Cost. Drones 2022, 6, 418. [Google Scholar] [CrossRef]
- Han, P.; Yang, X.; Zhao, Y.; Guan, X.; Wang, S. Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network. Sustainability 2022, 14, 5733. [Google Scholar] [CrossRef]
- Büyüközkan, G.; Mukul, E. Evaluation of smart city logistics solutions with fuzzy MCDM methods. Pamukkale Üniversitesi Mühendislik Bilim. Derg. 2019, 25, 1033–1040. [Google Scholar] [CrossRef]
- Tadić, S.; Radovanović, L.J.; Krstić, M.; Veljović, M. Study of barriers for the use of drones in the last mile logistics. In Proceedings of the 2nd International Conference on Advances in Traffic and Communication Technologies, ATCT 2023, Sarajevo, Bosnia and Herzegovina, 11–12 May 2023. [Google Scholar]
- Tadić, S.; Krstić, M.; Radovanović, L. Assessing Strategies to Overcome Barriers for Drone Usage in Last-Mile Logistics: A Novel Hybrid Fuzzy MCDM Model. Mathematics 2024, 12, 367. [Google Scholar] [CrossRef]
- Krstić, M.; Agnusdei, G.P.; Tadić, S.; Kovač, M.; Miglietta, P.P. A Novel Axial-Distance-Based Aggregated Measurement (ADAM) Method for the Evaluation of Agri-Food Circular-Economy-Based Business Models. Mathematics 2023, 11, 1334. [Google Scholar] [CrossRef]
- Girdzijauskaitė, E.; Radzevičienė, A.; Jakubavičius, A. Impact of international branch campus KPIs on the university competitiveness: FARE method. Insights Reg. Dev. 2019, 1, 171–180. [Google Scholar] [CrossRef] [PubMed]
- Sahoo, S.K.; Goswami, S.S. A comprehensive review of multiple criteria decision-making (MCDM) Methods: Advancements, applications, and future directions. Decis. Mak. Adv. 2023, 1, 25–48. [Google Scholar] [CrossRef]
- Ginevičius, R. A New Determining Method for the Criteria Weights in Multicriteria Evaluation. Int. J. Inf. Technol. Decis. Mak. 2011, 10, 1067–1095. [Google Scholar] [CrossRef]
- Kazan, H.; Özçelik, S.; Hobikoğlu, E.H. Election of deputy candidates for nomination with AHP-Promethee methods. Procedia-Soc. Behav. Sci. 2015, 195, 603–613. [Google Scholar] [CrossRef]
- Ginevicius, R.; Szczepanskawoszczyna, K.; Szarucki, M.; Stasiukynas, A. Assessing Alternatives to the Development of Administrative-Economic Units Applying the FARE. Adm. Manag. Public 2021, 36, 6–24. [Google Scholar]
- Roy, J.; Pamučar, D.; Kar, S. Evaluation and Selection of Third Party Logistics Provider under Sustainability Perspectives: An Interval Valued Fuzzy-Rough Approach. Ann. Oper. Res. 2020, 293, 669–714. [Google Scholar] [CrossRef]
- Krstić, M.; Tadić, S. Hybrid Multi-Criteria Decision-Making Model for Optimal Selection of Cold Chain Logistics Service Providers. J. Organ. Technol. Entrep. 2023, 1, 77–87. [Google Scholar] [CrossRef]
- Alguliyev, R.; Aliguliyev, R.; Yusifov, F. MCDM for candidate selection in e-voting. Int. J. Public Adm. Digit. Age (IJPADA) 2019, 6, 35–48. [Google Scholar] [CrossRef]
- Yazdani, M. New Approach to Select Materials Using MADM Tools. Int. J. Bus. Syst. Res. 2018, 12, 25. [Google Scholar] [CrossRef]
- Chatterjee, P.; Mondal, S.; Boral, S.; Banerjee, A.; Chakraborty, S. A Novel Hybrid Method for Non-Traditional Machining Process Selection Using Factor Relationship and Multi-Attributive Border Approximation Method. Facta Univ. Ser. Mech. Eng. 2017, 15, 439–456. [Google Scholar] [CrossRef]
- Stankevičienė, J.; Kraujalienė, L.; Vaiciukevičiūtė, A. Assessment of Technology Transfer Office Performance for Value Creation in Higher Education Institutions. J. Bus. Econ. Manag. 2017, 18, 1063–1081. [Google Scholar] [CrossRef]
- Pitchipoo, P.; Vincent, D.S.; Rajini, N.; Rajakarunakaran, S. COPRAS Decision Model to Optimize Blind Spot in Heavy Vehicles: A Comparative Perspective. Procedia Eng. 2014, 97, 1049–1059. [Google Scholar] [CrossRef]
- Agnusdei, L.; Krstić, M.; Palmi, P.; Miglietta, P.P. Digitalization as Driver to Achieve Circularity in the Agroindustry: A SWOT-ANP-ADAM Approach. Sci. Total Environ. 2023, 882, 163441. [Google Scholar] [CrossRef] [PubMed]
- Krstić, M.; Agnusdei, G.P.; Tadić, S.; Miglietta, P.P. Prioritization of E-Traceability Drivers in the Agri-Food Supply Chains. Agric. Food Econ. 2023, 11, 42. [Google Scholar] [CrossRef]
- Tadić, S.; Krstić, M.; Veljović, M.; Kovač, M. Selection of the starting point of e-order delivery using ADAM method. In Proceedings of the 50th International Symposium on Operational Research, SYM-OP-IS 2023, Tara, Serbia, 18–21 September 2023. [Google Scholar]
- Popovic, G.; Fedajev, A.; Mitic, P.; Meidute-Kavaliauskiene, I. An ADAM-based approach to unveiling entrepreneurial ecosystems in selected European countries. Manag. Decis. 2024. ahead-of-print. [Google Scholar] [CrossRef]
- Krstić, M.; Tadić, S.; Brnjac, N. Strategic Application of Industry 4.0 Technologies in Enhancing Intermodal Transport Terminal Efficiency. J. Organ. Technol. Entrep. 2023, 1, 98–109. [Google Scholar] [CrossRef]
- Krstić, M.; Tadić, S.; Jolović, M. Evaluation of Transshipment Technologies in Intermodal Terminals: A Hybrid FSWARA-ADAM Approach. J. Organ. Technol. Entrep. 2024, 2, 27–38. [Google Scholar] [CrossRef]
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on Drone Technology and Their Applications: A Comprehensive Review. In Proceedings of the 4th International Conference on Green Design and Manufacture, Ho Chi Minh, Vietnam, 29–30 April 2018. [Google Scholar] [CrossRef]
- Garg, P.K. Characterisation of Fixed-Wing Versus Multirotors UAVs/Drones. J. Geomat. 2022, 16, 152–159. [Google Scholar] [CrossRef]
- Melo, S.; Silva, F.; Abbasi, M.; Ahani, P.; Macedo, J. Public Acceptance of the Use of Drones in City Logistics: A Citizen-Centric Perspective. Sustainability 2023, 15, 2621. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Jiang, D. Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Li, X.; Tupayachi, J.; Sharmin, A.; Martinez Ferguson, M. Drone-aided delivery methods, challenge, and the future: A methodological review. Drones 2023, 7, 191. [Google Scholar] [CrossRef]
- Wang, Z.; Sheu, J.-B. Vehicle Routing Problem with Drones. Trans. Res. Part B Methodol. 2019, 122, 350–364. [Google Scholar] [CrossRef]
- Bachofner, M.; Lemardelé, C.; Estrada, M.; Pagès, L. City logistics: Challenges and opportunities for technology providers. J. Urban Mobil. 2022, 2, 100020. [Google Scholar] [CrossRef]
- Gabani, P.R.; Gala, U.B.; Narwane, V.S.; Raut, R.D.; Govindarajan, U.H.; Narkhede, B.E. A viability study using conceptual models for last mile drone logistics operations in populated urban cities of India. IET Collab. Intell. Manuf. 2021, 3, 262–272. [Google Scholar] [CrossRef]
- Xydianou, T.; Nathanail, E. The Use of Drones in City Logistics—A Case Study Application. In Proceedings of the Conference on Sustainable Urban Mobility (CSUM 2022): Smart Energy for Smart Transport, Skiathos Island, Greece, 31 August–2 September 2022. [Google Scholar]
- Rejeb, A.; Rejeb, K.; Simske, S.J.; Treiblmaier, H. Drones for Supply Chain Management and Logistics: A Review and Research Agenda. Int. J. Logist. 2023, 26, 708–731. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of Barriers to Implement Drone Logistics. Int. J. Logist. 2021, 24, 531–550. [Google Scholar] [CrossRef]
- Čokorilo, O. Aircraft Safety, 2nd ed.; University of Belgrade, Faculty of Transport & Traffic Engineering: Belgrade, Serbia, 2020. (In Serbian) [Google Scholar]
- Boudville, N.; Ramesh Prasad, G.V.; Knoll, G.; Muirhead, N.; Thiessen-Philbrook, H.; Yang, R.C.; Rosas-Arellano, M.P.; Housawi, A.; Garg, A.X. Meta-Analysis: Risk for Hypertension in Living Kidney Donors. Ann. Intern. Med. 2006, 145, 185. [Google Scholar] [CrossRef] [PubMed]
- Milovanović, M.; Čokorilo, O.; Čokorilo, S. Analysis of the impact of lightning strikes of flight safety. Int. J. Traffic Transp. Eng. 2022, 12, 352–360. [Google Scholar]
- Ayyub, B.M. Risk Analysis in Engineering and Economics, 1st ed.; Chapman and Hall/CRC: London, UK; Boca Raton, FL, USA; New York, NY, USA; Washington, DC, USA, 2003. [Google Scholar] [CrossRef]
- Choi, T.M. Risk Analysis in Logistics Systems: A Research Agenda during and after the COVID-19 Pandemic. Transp. Res. Part E Logist. Trans. Rev. 2021, 145, 102190. [Google Scholar] [CrossRef]
- Choi, T.M.; Chiu, C.-H.; Chan, H.-K. Risk Management of Logistics Systems. Transp. Res. Part E Logist. Trans. Rev. 2016, 90, 1–6. [Google Scholar] [CrossRef]
- Chung, S.H.; Tse, Y.K.; Choi, T.M. Managing Disruption Risk in Express Logistics via Proactive Planning. Ind. Manag. Data Syst. 2015, 115, 1481–1509. [Google Scholar] [CrossRef]
- Kulińska, E. Selected Tools for Risk Analysis in Logistics Processes. Arch. Transp. 2012, 24, 27–42. [Google Scholar] [CrossRef]
- Kulińska, E. Aksjologicznywymiarzarządzaniaryzykiemprocesówlogistycznych: Modeleieksperymentyekonomiczne; OficynaWydawniczaPolitechnikiOpolskiej: Opole, Poland, 2011. [Google Scholar]
- Sodhi, M.S.; Son, B.-G.; Tang, C.S. Researchers’ Perspectives on Supply Chain Risk Management. Prod. Oper. Manag. 2012, 21, 1–13. [Google Scholar] [CrossRef]
- Fuchs, H.; Wohinz, J.W. Risk management in logistics systems. Adv. Prod. Eng. Manag. 2009, 4, 233–242. [Google Scholar]
- Hesse, M. City logistics. network modelling and intelligent transport systems. J. Transp. Geogr. 2002, 10, 158–159. [Google Scholar] [CrossRef]
- Taniguchi, E.; Thompson, R.G.; Yamada, T. Incorporating Risks in City Logistics. Procedia Soc. Behav. Sci. 2010, 2, 5899–5910. [Google Scholar] [CrossRef]
- Ren, X.; Cheng, C. Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment. Sustainability 2020, 12, 8318. [Google Scholar] [CrossRef]
- Barr, L.C.; Newman, R.; Ancel, E.; Belcastro, C.M.; Foster, J.V.; Evans, J.; Klyde, D.H. Preliminary Risk Assessment for Small Unmanned Aircraft Systems. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone Technology: Types, Payloads, Applications, Frequency Spectrum Issues and Future Developments. In The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives; Information Technology and Law Series (ITLS); Custers, B., Ed.; T.M.C. Asser Press: The Hague, The Netherlands, 2016; Volume 27, pp. 21–45. [Google Scholar]
- Dileep, M.R.; Navaneeth, A.V.; Ullagaddi, S.; Danti, A. A study and analysis on various types of agricultural drones and its applications. In Proceedings of the Fifth International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN), Bangalore, India, 26–27 November 2020. [Google Scholar]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained control of UAVs in geofencing applications. In Proceedings of the 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018. [Google Scholar]
- Kim, T.H.; Toazza, D. Navigation Control of an Unmanned Aerial Vehicle (UAV). Bachelor’s Thesis, School of Information Science, Computer and Electrical Engineering Halmstad University, Halmstad, Sweden, 2009. [Google Scholar]
Figure 1.
Methodology of the study.

Figure 2.
Complex polyhedra of drone alternatives.

Figure 3.
Sensitivity analysis.

Figure 4.
Rankingcomparison obtained by various MCDM methods.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Smaller drone characteristics [57].
Table 1.
Smaller drone characteristics [57].
| Drone Class | Weight, Max [lb] | Velocity, Max [knots] | Kinetic Energy, Max [ft-lb] |
|---|---|---|---|
| A: Microdrone | 4.4 | 60 | 704 |
| B: Minidrone | 20 | 87 | 6727 |
| C: Small drone | 55 | 87 | 18,498 |
| Linguistic Term | Abbreviation | Fuzzy Scale | Numerical Value |
|---|---|---|---|
| “None” | “N” | (1, 1, 2) | 1 |
| “Very low” | “VL” | (1, 2, 3) | 2 |
| “Low” | “L” | (2, 3, 4) | 3 |
| “Fairly low” | “FL” | (3, 4, 5) | 4 |
| “Medium” | “M” | (4, 5, 6) | 5 |
| “Fairly high” | “FH” | (5, 6, 7) | 6 |
| “High” | “H” | (6, 7, 8) | 7 |
| “Very high” | “VH” | (7, 8, 9) | 8 |
| “Extremely high” | “EH” | (8, 9, 10) | 9 |
Table 3.
Criterion comparison ratings.
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1 | “EH” | “VH” | “FH” | “M” | “H” | “FL” | |||||||||||||||
| C2 | “N” | “L” | “FL” | “VL” | “M” | ||||||||||||||||
| C3 | “VL” | “L” | “N” | “FL” | |||||||||||||||||
| C4 | “N” | “N” | “VL” | ||||||||||||||||||
| C5 | “L” | “N” | |||||||||||||||||||
| C6 | “FL” | ||||||||||||||||||||
| C7 | |||||||||||||||||||||
Table 4.
Criterion weights.
| PJ | Pjr | wj | Crisp (wj) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| C1 | 33.00 | 39.00 | 45.00 | 81 | 93 | 105 | 0.77 | 1.40 | 2.12 | 1.4179 |
| C2 | 11.10 | 15.11 | 20.13 | 59.1 | 69.11 | 80.13 | 0.56 | 1.04 | 1.62 | 1.059 |
| C3 | 7.61 | 11.13 | 15.14 | 55.61 | 65.13 | 75.14 | 0.53 | 0.98 | 1.51 | 0.9965 |
| C4 | 3.73 | 5.00 | 8.70 | 51.73 | 59 | 68.7 | 0.49 | 0.89 | 1.39 | 0.9071 |
| C5 | 4.12 | 5.78 | 8.08 | 52.12 | 59.78 | 68.08 | 0.50 | 0.90 | 1.37 | 0.9135 |
| C6 | 4.71 | 6.98 | 8.67 | 52.71 | 60.98 | 68.67 | 0.50 | 0.92 | 1.38 | 0.9284 |
| C7 | 1.60 | 2.45 | 3.17 | 49.6 | 56.45 | 63.17 | 0.47 | 0.85 | 1.27 | 0.8594 |
Table 5.
The focus group members’ characteristics.
| Sector | Number of Experts | Years of Experience |
|---|---|---|
| 4 | up to 5 | |
| City logistics | 3 | from 5 to 15 |
| 3 | over 15 | |
| 1 | up to 5 | |
| Drones/air transport | 3 | from 5 to 15 |
| 5 | over 15 | |
| 1 | up to 5 | |
| Risk analysis | 7 | from 5 to 15 |
| 2 | over 15 |
Table 6.
Evaluations and normalized numerical evaluations of alternatives according to criteria (ADAM method).
Table 6.
Evaluations and normalized numerical evaluations of alternatives according to criteria (ADAM method).
| Evaluations | Normalized Numerical Evaluations | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | C1 | C2 | C3 | C4 | C5 | C6 | C7 | ||
| D1 | “H” | “M” | “FL” | “FL” | “EH” | “FL” | “FL” | D1 | 0.8 | 0.6 | 0.5 | 0.6 | 1.0 | 0.8 | 0.6 |
| D2 | “VH” | “VH” | “M” | “H” | “L” | “M” | “FH” | D2 | 0.9 | 0.9 | 0.6 | 1.0 | 0.3 | 1.0 | 0.9 |
| D3 | “EH” | “EH” | “H” | “VL” | “FH” | “FL” | “H” | D3 | 1.0 | 1.0 | 0.9 | 0.3 | 0.7 | 0.8 | 1.0 |
| D4 | “FL” | “M” | “L” | “L” | “VH” | “VL” | “VL” | D4 | 0.4 | 0.6 | 0.4 | 0.4 | 0.9 | 0.4 | 0.3 |
| D5 | “M” | “H” | “FH” | “FH” | “VL” | “L” | “FL” | D5 | 0.6 | 0.8 | 0.8 | 0.9 | 0.2 | 0.6 | 0.6 |
| D6 | “FH” | “VH” | “VH” | “VL” | “M” | “VL” | “L” | D6 | 0.7 | 0.9 | 1.0 | 0.3 | 0.6 | 0.4 | 0.4 |
| D7 | “N” | “M” | “VL” | “L” | “H” | “N” | “N” | D7 | 0.1 | 0.6 | 0.3 | 0.4 | 0.8 | 0.2 | 0.1 |
| D8 | “VL” | “FH” | “L” | “M” | “N” | “VL” | “L” | D8 | 0.2 | 0.7 | 0.4 | 0.7 | 0.1 | 0.4 | 0.4 |
| D9 | “L” | “H” | “L” | “N” | “FL” | “N” | “N” | D9 | 0.3 | 0.8 | 0.4 | 0.1 | 0.4 | 0.2 | 0.1 |
Table 7.
Ranking of alternatives according to criteria (ADAM method).
| Alternatives | Volume | Rank |
|---|---|---|
| D1 | 0.175692 | 3 |
| D2 | 0.211696 | 2 |
| D3 | 0.233089 | 1 |
| D4 | 0.089025 | 6 |
| D5 | 0.150036 | 5 |
| D6 | 0.157237 | 4 |
| D7 | 0.048132 | 9 |
| D8 | 0.058588 | 7 |
| D9 | 0.050106 | 8 |
Table 8.
Alternatives ranking by the scenarios.
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | D9 | SCC | |
|---|---|---|---|---|---|---|---|---|---|---|
| Sc.0 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | / |
| Sc.1 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | 1 |
| Sc.2 | 3 | 2 | 1 | 6 | 4 | 5 | 9 | 7 | 8 | 0.983 |
| Sc.3 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | 1 |
| Sc.4 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | 1 |
| Sc.5 | 3 | 2 | 1 | 5 | 6 | 4 | 9 | 8 | 7 | 0.967 |
| Sc.6 | 4 | 2 | 1 | 6 | 5 | 3 | 9 | 7 | 8 | 0.983 |
| Sc.7 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | 1 |
| Sc.8 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | 1 |
| Sc.9 | 3 | 2 | 1 | 6 | 5 | 4 | 9 | 7 | 8 | 1 |
| Sc.10 | 3 | 2 | 1 | 7 | 5 | 4 | 9 | 6 | 8 | 0.983 |
Table 9.
Comparing results of the model with other MCDM methods.
| ADAM | TOPSIS | VIKOR | SAW | COPRAS | AHP | COBRA | |
|---|---|---|---|---|---|---|---|
| D1 | 3 | 3 | 5 | 3 | 3 | 3 | 3 |
| D2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| D3 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| D4 | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
| D5 | 5 | 4 | 4 | 4 | 4 | 4 | 5 |
| D6 | 4 | 5 | 3 | 5 | 5 | 5 | 4 |
| D7 | 9 | 8 | 9 | 8 | 8 | 8 | 8 |
| D8 | 7 | 7 | 8 | 7 | 7 | 7 | 7 |
| D9 | 8 | 9 | 7 | 9 | 9 | 9 | 9 |
| SCC | 1 | 0.96667 | 0.93333 | 0.96667 | 0.96667 | 0.96667 | 0.98333 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tadić, S.; Krstić, M.; Veljović, M.; Čokorilo, O.; Milovanović, M. Risk Analysis of the Use of Drones in City Logistics. Mathematics 2024, 12, 1250. https://doi.org/10.3390/math12081250
AMA Style
Tadić S, Krstić M, Veljović M, Čokorilo O, Milovanović M. Risk Analysis of the Use of Drones in City Logistics. Mathematics. 2024; 12(8):1250. https://doi.org/10.3390/math12081250
Chicago/Turabian StyleTadić, Snežana, Mladen Krstić, Miloš Veljović, Olja Čokorilo, and Milica Milovanović. 2024. "Risk Analysis of the Use of Drones in City Logistics" Mathematics 12, no. 8: 1250. https://doi.org/10.3390/math12081250
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.