On the Riemann Function

School of Mathematics and Statistics, University of Sydney, Sydney, NSW 2006, Australia
Mathematics 2018, 6(12), 316; https://doi.org/10.3390/math6120316
Submission received: 26 October 2018
/
Revised: 6 December 2018
/
Accepted: 6 December 2018
/
Published: 10 December 2018
{kind=link}
Abstract
:Riemann’s method is one of the definitive ways of solving Cauchy’s problem for a second order linear hyperbolic partial differential equation in two variables. The first review of Riemann’s method was published by E.T. Copson in 1958. This study extends that work. Firstly, three solution methods were overlooked in Copson’s original paper. Secondly, several new approaches for finding Riemann functions have been developed since 1958. Those techniques are included here and placed in the context of Copson’s original study. There are also numerous equivalences between Riemann functions that have not previously been identified in the literature. Those links are clarified here by showing that many known Riemann functions are often equivalent due to the governing equation admitting a symmetry algebra isomorphic to . Alternatively, the equation admits a Lie-Bäcklund symmetry algebra. Combining the results from several methods, a new class of Riemann functions is then derived which admits no symmetries whatsoever.
1. Introduction
The interest in Riemann’s method is long-standing. The reason is that once the Riemann function is determined, the governing equation can be solved for Cauchy data on any other non-characteristic curve. The value of such a property means that Riemann’s method continues to draw the attention of investigators today. Some applications include solving electromagnetic problems exhibiting rotational symmetry [1], finding existence criteria for the eigenvalues of the solution of focal point problems [2], solving for the solution of transient plane waves [3], and the inverse problem of scattering theory [4,5,6,7,8,9,10,11,12]. More recently, Riemann’s method has been applied to the solution of coupled Korteweg-de Vries equations [13], to boundary value problems for the non-homogeneous wave equation [14,15,16,17,18], to the solution of the non-linear Schrödinger equation [19,20], and modelling hyperbolic quasi-linear equations [21,22,23].
Copson [24] wrote the first review of Riemann’s method in 1958. In total, he listed six different techniques to solve for the Riemann function. However, three other approaches were missed by Copson. They are included here for completeness. Since 1958, another four methodologies have emerged for finding Riemann functions. Often the resulting Riemann functions are not new but rather a reduction of some more general Riemann function or obtainable from another Riemann function by a change of variables. This fact is frequently overlooked in the literature. Here, the new methods are outlined to extend Copson’s review and the equivalences are clarified. One finding is that the Riemann functions are equivalent because the governing equation admits a symmetry algebra isomorphic to . Alternatively, the equation admits a Lie-Bäcklund symmetry algebra. By combining several of the solution techniques, a new class of Riemann functions is then obtained that admits no symmetries whatsoever.
Consider the partial differential equation (PDE) in characteristic variables
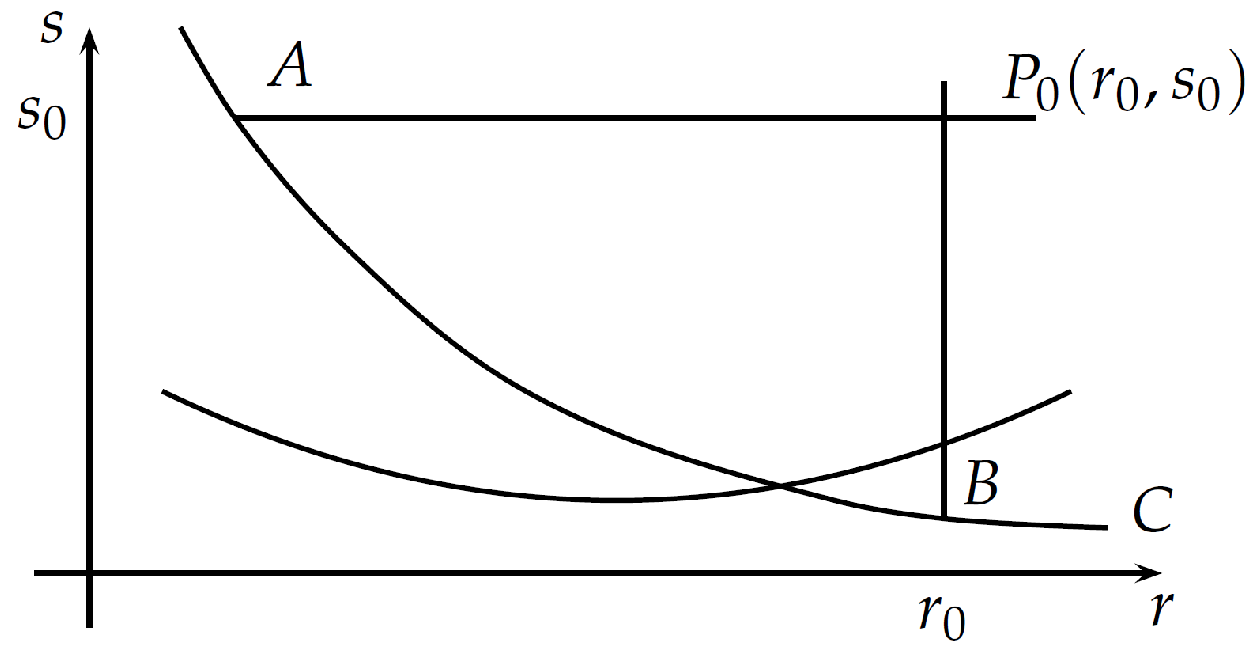
The aim is to represent a solution U at a point in terms of the initial data, which are the values of U and one outgoing derivative of U on the initial curve C. Thus, both and , where and are constants, are known on C from such data as shown in Figure 1. Take the adjoint
and define such that
is called the Riemann function. It is the solution of the characteristic boundary value problem for the adjoint equation denoted by (3)–(6). will hold for arbitrary initial values given along an arbitrary noncharacteristic curve C. The Cauchy problem then has a unique solution given by
An equivalent formulation to that just given can also be obtained by using the canonical variables
2. Copson’s Review
Copson [24] published the first review of Riemann’s method in 1958. In all, Copson listed six different methods for finding the Riemann function. They were:
- Riemann’s original method [25], which was based on the fact that the Riemann function does not depend in any way on the curve carrying the Cauchy data. Solving the Cauchy problem by some other means for a special curve (e.g., a straight line) then yields the Riemann function by a comparison of the two solutions. Riemann only gave explicit formulae for the Riemann function in the two cases which interested him from gas dynamics. The most famous of these is the Euler-Poisson-Darboux equation (EPD)which has Riemann functionwhereand is the hypergeometric function (see the Appendix A for details of all the hypergeometric functions used in this article). Equation (15) was derived via a Fourier cosine transform.
- Hadamard [26] showed that the coefficient of the logarithmic term in his elementary solution is the Riemann function for the adjoint equation.
- For separable equations, Copson found that it is straightforward to construct an integral equation whose unique solution is the Riemann function.
- Mackie [24] constructed complex integral solutions of certain equations. An appropriate choice of contour results in the Riemann function.
- Titchmarsh [34] gave a direct solution for the Riemann function of the equation of damped waves by means of a complex Fourier integral.
Equations (14) and (17) have been singled out here as they occur repeatedly in the literature. Equation (14) is a subcase of (17) in canonical variables, where . In fact in 1958, (17) was the most general self-adjoint equation for which the Riemann function was known.
2.1. Self Adjoint Riemann Functions
In 1979, a summary of all the known self-adjoint Riemann functions was published by Lanckau [35]. For an arbitrary equation,
the cases he listed were:
- , which has Riemann functionwhere is an arbitrary constant, is the modified Bessel function of zero order and
Each of the above cases is easily obtained from Chaundy’s equation (17). Consider case four. If in (17), the corresponding terms in the multiple power series (18) are replaced by unity. Consequently, (17) reduces automatically to the equation given in case four and (18) becomes (26). This is likewise for case two. Cases one and three require a confluence. Starting with an equation in the form of case two, make the change of variables
Taking the limit as yields the equation from case one, with the corresponding Riemann function (22). A similar argument shows that case three is obtainable from case four. For case five, start with Equation (17) and set . Make the change of variables
and let to obtain the equation from case five.
The one equation listed by Lanckau, which has not previously been linked to Chaundy’s equation and its contractions, is
with
where are constants subject to the conditions that
and
Neither Püngel nor Lanckau made any connection from this case to Chaundy’s Equation (17). However, standard calculations show that Püngel’s equation is Möbius equivalent to Chaundy via
3. Methods not Included by Copson
The six approaches listed by Copson [24] were all that were known to him. Likewise, the equations listed in Section 2.1 were the only cases he was aware of, apart from trivial changes of the dependent or independent variables. However, another three methods were not included by Copson. In 1937, Courant and Hilbert [40] derived the Riemann function for the Telegrapher’s equation via Lie-Point symmetries; although this was only really made clear in a 1962 translation of their benchmark text “Methoden Der Mathematischen Physik II”. Their approach represents the first use of symmetry groups for Riemann’s method. Cohn [41] developed an iterative technique to obtain the Riemann function. Olevskiĭ [42] also derived an addition theorem for the Riemann function of an equation based on the Riemann functions of two simpler separable equations.
3.1. The Telegrapher’s Equation
In the original German text, Courant and Hilbert referred to their method as “der Symmetrie der Differentialgleichung den ansatz”. But what this in fact means is a little obscure. In 1937, the process of similarity reduction, instigated by Lie [43], was still embryonic. To understand what was intended, the expanded 1962 translation is more instructive. Take the Telegrapher’s equation
with constant . Courant and Hilbert’s argument is then the following. Since the operator L has constant coefficients, depends only on the relative position of the points and . Moreover, letting be the origin, we observe that if
satisfies conditions (3) to (6) imposed on the Riemann function, then
also satisfies them. Clearly implies so that (3) is satisfied. Condition (4) means (since ) that remains constant along the coordinate axes. If V has this property, then W also has it; and finally implies . Since these conditions determine Riemann’s function uniquely, it follows that is a function of . For general , the Riemann function then has the form
where
The equation then yields the equation for f which, if we set , becomes Bessel’s equation
which has solution
Consequently the Riemann function is
Clearly what Courant and Hilbert had in mind was that the PDE for the Riemann function and the associated boundary conditions are invariant under a three-parameter Lie transformation group. The details of their argument reflect the emerging nature of symmetry groups as a method of solution in this area. More systematic use of symmetry groups to find Riemann functions have subsequently been developed by Bluman [44], Daggit [45], Ibragimov [46], and Iwasaki [47], which will all be explored in Section 4.
3.2. Successive Iterations and the Banach Fixed Point Principle
In 1946, Cohn [41] considered equations of the form
where H is an arbitrary function of its argument to be determined. Cohn sought to prove the existence of by iteration. Hence, he rewrote (31) and condition (6) as the single equation
where is the rectangle formed by the horizontal and vertical lines through and . By continual recursive substitution of the right hand side of (32) into itself, he obtained the formal iterated series
This iterative process is also known as the Banach fixed point principle [48]. Now equals zero, whenever or , thus is also a constant for these values of r or s. This led Cohn to try a Riemann function of the form
Expanding as a power series in , the coefficients of the series must vanish, yielding the non-linear ordinary differential equation for H
which has solution
and are real valued constants. After a few further calculations, Cohn found that the Riemann function for (31), where H is given by (35), is
and
The form of H immediately suggests a few simpler limiting cases. For example, take and rename , , then if we obtain . Applying the limiting process of confluence, the Riemann function is then
Similarly, letting , the Telegrapher’s Equation (30), is recovered.
Apparently unaware of the work of Cohn, in 1986, Vaz et al. [49] proved an existence and uniqueness theorem for the iterative process (33). They considered the more general problem
where
Reformulate Equation (39) in terms of the linear Volterra integral equation
for which and , as defined by Cohn. Writing the solution of (40) as
the existence and uniqueness of (41) was then proven. Cohn chose a specific functional form for . In principle, the approach can be applied to more general functions - hence the usefulness of the theorem. Vaz et al. subsequently used (41) to derive the Riemann function for the Telegrapher’s Equation (30).
3.3. Olevskiĭ’s Addition Formula
Copson’s method three from his review paper [24] proposed a way to derive Riemann functions that extends Riemann’s own contribution to the field. It relies on the separability of the governing equation. However, it turns out that an addition formula, which encompasses Copson’s approach, was already in the Russian literature in 1952 [42]. This was not noted until 1977, in an erratum [50] to Papadakis and Wood’s paper [51], which rederived Olevskiĭ’s result.
In Olevskiĭ’s notation, the Riemann function, , of the equation
is
and are the Riemann functions for
and
Alternatively, integrating by parts yields the equivalent formula
Olevskiĭ obtained this result in part by using the method of successive approximations, which mirrors Cohn’s approach in Section 3.2, but there are not many details in the paper. Mostly, Olevskiĭ limits himself to showing that (43) satisfies (42) and the conditions (11)–(13).
To apply this addition formula efficiently, the following identity, which was first employed by Chaundy [30], can be useful. Within the region of uniform convergence of the infinite series that define the indicated functions, we have
Olevskiĭ included three specific examples in his paper, illustrating the use of the addition formula. We shall consider one of those examples here. Firstly, Olevskiĭ stated that the Riemann function for
was
where
No derivation for this Riemann function was given. In particular, it is not on the list of self-adjoint Equations (21) from Section 2.1. Nevertheless, interchanging the roles of x and y and letting yields
with the associated Riemann function,
and
Equations (46) and (52) are in fact subcases of (17). This will be explored further in Section 4.1 and Section 4.5. Again, this shows the historic difficulty in identifying equivalences in the literature.
4. Developments Since 1958
Several new constructive techniques have been proposed since the publication of Copson’s paper. The resulting Riemann functions are often equivalent, under a change of variables, although that fact has often been missed in the literature. The aim here is to outline the solution methods and clarify the equivalences. A key finding is that the equivalence can be defined in terms of the governing equation admitting a symmetry algebra isomorphic to or to a Lie-Bäcklund symmetry algebra.
4.1. Lie Point Symmetries
As stated in Section 3.1, the use of symmetry groups to find Riemann functions dates to 1937. However, a modern treatment of the technique did not emerge until 1967, in the Ph.D. thesis of Bluman [44,52]. Subsequently, the approach has become an active area of investigation [45,46,53,54,55]. Bluman’s method gave a completely algorithmic way of applying Lie point symmetries to Riemann’s method and thus further developed the technique pioneered by Courant and Hilbert.
Bluman’s treatment employed the (now) well-understood infinitesimal representation for deriving symmetry reductions. Employing the definitions and terminology of Olver [56], let
where
be a vector field defined on an open subset, , of the space of independent and dependent variables. The n-th prolongation of v is the vector field,
defined on the corresponding jet space, , with the second summation being over all unordered multi-indices and , . The coefficient functions of are given by the following formula:
The total differential, , is given by
We also have that
Now suppose that
is an n-th order system of differential equations of maximal rank defined over . If G is a local group of transformations acting on M, and
for every infinitesimal generator v of G, then G is a symmetry group of the system.
Taking these definitions, Bluman analysed the EPD equation written as
which is slightly different to (14) (Any equation where is an arbitrary function, may be put into self-adjoint form by the transformation to obtain Hence, the change of variable will convert (59) to (14).)
Bluman’s idea was to follow the 1962 lead of Mackie [57] and find the Green’s function of (59). Mackie showed that the relationship between the Riemann and Green’s functions can be written as
where was defined in Figure 1.
So given the vector field,
the symmetry group of (59) is found by taking
to obtain a system of seven determining equations for the infinitesimals , , and . Solving these equations produces a four-dimensional symmetry group. The presence of the delta functions (and therefore of their derivatives) gives rise to the extra condition . Applying this condition, Bluman obtained the specific group
Hence
The similarity variables are defined by the integrals
which give
with an arbitrary function of z. Substituting (61) into (59), Bluman found that
Letting , (62) becomes the hypergeometric equation
The solution displaying the desired properties, (3)–(6), is , where A is a normalization constant to be determined. Putting this all together and using (60), the Riemann function for (59) is then
In 1970, Daggit [45] also employed symmetry groups in an effort to find Riemann functions. His idea was to obtain conditions on the coefficients a, b, and c of (1) which allow a similarity reduction to the Riemann function. Daggit found three distinct cases in which the Riemann function could be found. Kokinasidi [53] also presented similar results to those given by Daggit. Extending Daggit’s results, Wood [58] defined any Riemann function
where M and G are functions, to be a simple Riemann function when (i) the equation is almost self-adjoint, (ii) the ODE for f has coefficients depending on G, and (iii) the characteristic conditions for the Riemann function become initial conditions for f (Wood’s assumed form of the solution, when taken in light of the fact that he is essentially discussing similarity solutions, can be thought of as a first step towards the direct method of symmetry calculation derived by Clarkson and Kruskal [59] in 1989). All the results of Daggit [45], Riemann [25] in Section 2 method 1 and Cohn [41] from Section 3.2 are simple Riemann functions. Wood concluded that, for self-adjoint equations, all the simple Riemann functions had been found by these three authors. Geddes and Mackie [60] arrived at essentially the same conclusion when they found Cohn’s method [41] does not produce any new results even if one seeks a Riemann function where R satisfies an ODE.
In other words, the equations
are essentially the only possibilities. The first three are the Telegrapher’s equation, the EPD equation and Cohn’s equation. The fourth equation is (46) from Section 3.3 that was cited, without derivation, by Olevskiĭ. The last one appears to be new.
Wood’s statement that these are the only possible cases needs clarifying. In [61], Bluman showed how to construct invertible point transformations, which map a given PDE into another PDE, in the sense that any solution of the given PDE is mapped into a solution of the target PDE. In general, such a mapping need not be a group transformation. Although, if the mapping from a given PDE to a target PDE is one-to-one (invertible) then the transformation must establish a one-to-one correspondence between the infinitesimal generators of the given PDE and the target PDE. More precisely, it is necessary that any given Lie algebra of infinitesimal generators of the given PDE be isomorphic to a Lie algebra of infinitesimal generators of the target PDE. Recall that a Lie algebra with basis set will be isomorphic to the Lie algebra with basis set if
and
where
is the usual commutator and the structure constants are the same for and . A few calculations show that the symmetry algebras of (65)–(68) satisfy (69)–(71) and (64) is obtained via a confluence. In effect, (64)–(68) form an equivalence class.
In 1991, Ibragimov [46], unaware of the research of Daggit et al., published a unifying result connecting all previous symmetry group studies for Riemann’s method. Again, Ibragimov looked at predicting the form of the Riemann function based on the coefficients a, b, and c of (1). The idea is that any linear hyperbolic PDE can be classified based on the size of the group that it admits. Ovsiannikov [62] showed that (1) admits a four-dimensional Lie algebra, if and only if, the invariants (Ovsiannikov invariants)
are constants (if then swap k and h). When p or q (or both of them) is not constant then the symmetry algebra is two dimensional. Here, h and k are Laplace invariants of (1)
When p and q are constant and , one obtains case one as found by Daggit. Whereas Daggit’s cases two and three correspond to .
As calculated by Bluman, the symmetry algebra of the EPD equation is four dimensional. Furthermore, the symmetry algebra of the EPD equation is isomorphic to [46]. Using standard results from Lie theory [63], the symmetries exponentiate to a local Lie representation of the group by operators , where
and
Using this fact, one can show that the fundamental solution can be represented in terms of the hypergeometric function. In effect, all the Riemann functions given in this section are encompassed by this result.
In 2015, Andrey et al. [55] studied the equation
for which the Riemann function was obtained via a symmetry reduction as
Applying (72) shows that and . Hence, (73) falls into case two of Daggit and it admits a four dimensional symmetry algebra. Equation (73) is simply a confluent form of the EPD Equation (14), under a transformation of variables.
In 2003, an interesting qualitative property linked to (72) was published in [54]. There, it was shown that if and q is a non-zero constant in (72), then (1) can be written as
which can be factorized to give
The Riemann function is then easily obtained from the factorization.
4.2. Laplace Transform for a Klein-Gordon Equation with a Non-Constant Coefficient
The first paper exploring the application of Laplace transforms to Riemann’s method was due to Scott [64]. In 1977, Wahlberg [65] also used the technique to find the Riemann function for
To solve (77), first make the change of variables,
Note that from (72), but . Hence, (79) is not part of the equivalence class of equations admitting a symmetry group isomorphic to that was seen in Section 4.1. By extension, there is no invertible transformation from (79) to the EPD Equation (14).
Equation (79) is then solved by Laplace transform. Write the transform of as
The transformed version of (79) is
after applying the boundary condition (80). The solution to (81) is easily obtained as
The function F is determined from the condition that , or , which yields
Expressing (84) as a contour integral, Wahlberg showed that the Riemann function for (77) can then be represented by
where is defined by , encircling the origin in the positive direction (since the integrand is analytic everywhere except at , can be taken to be any closed contour encircling the origin in the positive direction).
Alternatively, expanding of the integrand as a power series then applying the formula [66]
for the Bessel function of order n, yields
with
4.3. The Multiplication Formula
In 1981, Xin Hua Du [67] derived a multiplication theorem for Riemann functions. Returning to the method of successive approximations, first used by Cohn [41] and Olevskiĭ [42] as outlined in Section 3, Du wrote the Riemann function for the equation
as
where and
For simplicity write
From this starting point, Du supposed that in (89). In this way, the corresponding Riemann function (90) can be denoted by . Then the Riemann function, , for the equation
is
Conversely, if is given, then similarly we have
Again for convenience, write and as and . We are now in a position to state Du’s main result. If and , then the Riemann function, , for the equation
can be given by
where represents a convolution. Furthermore and must possess the properties
4.4. Finite Groups and a Link to Appell’s
First, return to the equation
Recall that it was seen as case 4 of (21), where it was obtained as a reduction of Chaundy’s Equation (17). The Riemann function in characteristic variables was
where and are given by (19). Applying (72), it is straight forward to show that the Riemann function for (99) cannot be obtained by means of point symmetries as the group is trivial. However, Iwasaki [47] found in 1988 that, although a symmetry reduction will not yield the Riemann function, a finite group isomorphic to acting on its Riemann function permitted him to reduce (99) to Appell’s system .
As Iwasaki showed, the Riemann function is invariant under the transformations of the independent variables of the form
- ,
- ,
- .
Taking advantage of transformation 1, define the new variables
The Riemann function must now satisfy
The group G generated by the transformations of have the generators
As is easily seen, , , and are involutions and commutative with each other. Hence the group is and .
Iwasaki then sought an extension to the field where and . With this in mind, he defined the new variables
where runs over all permutations of and , and . Thus . After further examination of the field, Iwasaki was led to try
Substitution of (106) into (101) and (102) gives
where
and is defined by (105). Since and are G-invariant and is not an element of , (107) splits into two parts:
Iwasaki then proposed that if is a solution of (108) (suppose that f makes sense at ), then is also a solution of (108). Hence it is reasonable to expect that is a function depending only on and to consider a system of PDEs
to which (108) reduces if this expectation is correct. Now from (102), implies . If (109) has a solution satisfying this condition then the assumption is correct and R will be given by such a solution. Unfortunately such an expectation is probably specific to this example and may prevent the possibility of building a general method based on Iwasaki’s work. In fact, it is reminiscent of the type of inspired guess for which many classical Riemann function papers have been criticised.
In any event, the substitutions
transform (109) into a system of partial differential equations associated with Appell’s hypergeometric function , where etc., depend on m and n. Iwasaki then shows that the general solution can be expressed as a linear combination of four contiguous functions. After further calculations, he concludes that the Riemann function for (99) is
where
and
4.5. Lie-Bäcklund Symmetries
In 2004, Zeitsch [68,69] was able to establish a new equivalence class of Riemann functions by extending the point symmetry ideas of Section 4.1 to Lie-Bäcklund symmetries. The key result was given in [68]. There it was shown that Chaundy’s Equation (17) admitted a two-dimensional generalized symmetry algebra. A straightforward calculation shows that (17) admits no non-trivial point symmetries. Following [70], define the second-order operator
We say that (110) is a Lie-Bäcklund symmetry operator for (17) provided
where
and
is a first-order differential operator (here Q may vary with S) and are arbitrary functions of r and s.
Solving (111) and equating the coefficients of the derivatives to zero yields a two-dimensional vector space of operators. The symmetries, and , form a basis and have differential part
Following [70], for each inequivalent orbit, a separable coordinate system exists. Taking a linear combination of (114) and (115), there are then four orbits, namely:
- .
- .
- .
- .
Analysing each case, Zeitsch then found:
System 1: The separable coordinates are
where , , and k is the modulus of the Jacobian elliptic functions. See [71] for more detail on the elliptic functions and as well as the other elliptic functions such as . When (116) is substituted into (17), the following separable equation is obtained
The Riemann function for (117) is found by substituting (116) into (18)–(20). Hence
where
System 2: For the symmetry we find the separable coordinate system
The Riemann function for (124) is then
where
System 3: For the symmetry , we find the separable coordinate system
The Riemann function for (129) is now
and
System 4: For the symmetry where , the separable coordinate system is
where , and . As in system 1, a is arbitrary and k is the modulus of the elliptic functions. Substituting (133) into (17) yields
Returning to (124), setting , we recover (52). Hence (52) is in fact a sub-case of Chaundy’s equation, obtainable via a Lie-Bäcklund symmetry. A quick calculation shows that (124) only admits one first order symmetry. As such, the group is not isomorphic to . In this way, a new equivalence class of Riemann functions has been established. Likewise, take (129) and let . The Riemann function for this case was first given in [51] by using the techniques from Section 3.3. It is therefore also part of the equivalence class admitting the two-dimensional generalized symmetry algebra (114) and (115).
5. New Riemann Functions
Based on the link between (124) and (52), seen at the end of Section 4.5, the possibility now exists to construct new Riemann functions, which do not fit into either the point symmetry equivalence class, nor that defined by the generalized symmetries of (17). Taking separable equations and applying them to (43) will result in equations for which there is no invertible transformation to a known Riemann function as the group of the resulting equation will be trivial. Among the separable equations from the previous sections, four possibilities for application to the addition formula arise straight away. If we let and in (124), and in (129), as well as in (14) and (77), we obtain
The Riemann functions for the first three equations are respectively
where and were given by (126) and (127). Similarly, , , and were defined by (16), (131), and (132) respectively. Note also that the roles of and are interchanged, as required. Call the Riemann function for (), which was defined by Equations (86)–(88) (again interchanging the roles of x and y with and as required).
The constants and were introduced trivially into (140) and (141). However, after applying these two equations to the addition formula, the ratio becomes essential. In other words, it is possible to transform away either or , but it is no longer possible to eliminate both and from (147) via a change of variables. Effectively, a five parameter Riemann function has been obtained. It is useful to write the equation as (147) though, which at first glance incorporates six parameters, as the equation is then symmetric. This is now the most general self-adjoint equation for which the Riemann function is known. It incorporates one more essential parameter than Chaundy’s Equation (17). It was first published in [68].
The Riemann function for (150) was first given in [51] by using the addition formula. However, both (149) and (150) can be obtained as confluent reductions of (147). To see this, firstly let in (147). Then if we take the limit as , we obtain (149). In a completely analogous way, to recover (150), start with (147), set , and again take the limit as . The result is (150) as desired.
In order to obtain truly new Riemann functions, Equations (140)–(142) need to be combined with (143). Hence, for the equations
the Riemann functions are respectively
where , , and are given by (144)–(146). is defined by (86)–(88) and the roles of and are interchanged as required. The final possibility is to use (143) twice. That is, to take the equation
The Riemann function for (154) is given by
where remains unchanged. is obtained by interchanging the roles of and in (86)–(88). The Riemann function for (154) first appeared in [69] for the case where . The full equation has not been published before.
Equations (151) to (154) admit no point symmetries. Likewise, they have no non-trivial Lie-Bäcklund symmetries. Hence, they fall outside the equivalence classes of Riemann functions studied in Section 4.1 and Section 4.5. In this way, (151)–(154) represent a completely new class of Riemann functions.
6. Conclusions
Extending the review undertaken by Copson in 1958, seven additional approaches to the original six documented methods, have been detailed. Listing them chronologically, they are:
- Lie point symmetries.
- The method of successive approximations.
- The addition formula.
- Laplace transforms.
- The multiplication formula.
- Finite groups.
- Lie-Bäcklund symmetries.
Furthermore, the equivalences generated by point symmetries, where the governing equation admits a symmetry algebra isomorphic to , have been clarified. This has now been complemented by a new equivalence class of Riemann functions which is obtainable only from a generalized symmetry and admits no non-trivial point symmetries. Hence, we have obtained a useful new diagnostic tool in the hunt for equivalences amongst PDEs and their Riemann functions. By combining several of the solution techniques, several new Riemann functions were then derived that admitted no symmetries whatsoever.
To conclude, other papers have also been published since Copson’s review. For instance, the idea of the complex Riemann function has been considered [38,72,73,74]. It is largely based on the work of Vekua [75]. Qualitative properties of the Riemann function have also been explored [76,77,78]. As far as other qualitative properties go, only the “duality” property is known [40]. Higher dimensional Riemann functions have also been explored by Zhegalov [79] and Koshcheeva [80].
Funding
This research was funded by an Australian Postgraduate Award.
Acknowledgments
The referees are thanked for their feedback. The author is also grateful to Edward D. Fackerell and Christopher M. Cosgrove for their guidance on this work.
Conflicts of Interest
The author declares no conflict of interest.
Appendix A. Hypergeometric Functions
Here, the definitions and key properties of the hypergeometric functions seen in this paper are included for reference. Greater detail can be found in [33,36]. The functions are included in the order in which they appeared.
- whereThis function is a particular solution of the equationOf particular note is the relationship between the Legendre function and the hypergeometric function
- where etc. are given by A1). This function is the solution to the system of equations
- where etc. are given by (A1). This function is the solution to the system of equations
- where etc. are given by (A1). This function satisfies the system of equationsfor .
- This function is a particular solution of the equation
- where etc. are given by (A1). This function is the solution of the system of equations
References
- Solimeno, S. Riemann-Green’s Functions for Solving Electromagnetic Problems Exhibiting Rotational Symmetry in Media Moving with Superluminal Velocities. J. Math. Phys. 1975, 16, 218–223. [Google Scholar] [CrossRef]
- Iraniparast, N. Green-Riemann Functions for a Class of Hyperbolic Focal Point Problems. SIAM J. Math. Anal. 1989, 20, 408–414. [Google Scholar] [CrossRef]
- Asfar, O.R. Riemann-Green Function Solution of Transient Plane Waves in Lossy Media. IEEE Trans. Electromagn. Compat. 1990, 32, 228–231. [Google Scholar] [CrossRef]
- Coz, M.; Coudray, C. Existence of Generalized Translation Operators from the Agranovitch-Marchenko Transformation (Jost Solutions). J. Math. Phys. 1973, 14, 1574–1578. [Google Scholar] [CrossRef]
- Coz, M.; Coudray, C. The Riemann Solution and the Inverse Quantum Mechanical Problem. J. Math. Phys. 1976, 17, 888–893. [Google Scholar] [CrossRef]
- Coz, M. The Riemann Solution in the One-Dimensional Inverse Problem. J. Math. Anal. Appl. 1977, 61, 32–250. [Google Scholar] [CrossRef]
- Coz, M.; Rochus, P. Partial Differential Matrix Equations for the Inverse Problem of Scattering Theory. J. Math. Phys. 1976, 17, 894–899. [Google Scholar] [CrossRef]
- Coz, M.; Rochus, P. The Translation Kernel in the N-Dimensional Scattering Problem. J. Math. Phys. 1977, 18, 2223–2231. [Google Scholar] [CrossRef]
- Coz, M.; Rochus, P. Translation Kernels for Velocity Dependent Interactions. J. Math. Phys. 1977, 18, 2232–2240. [Google Scholar] [CrossRef]
- Coz, M.; Rochus, P. Extension of the Marchenko Equation to Non-Hermitian Differential Systems. Anna. Phys. 1980, 126, 460–499. [Google Scholar] [CrossRef]
- Gugushvili, H.I.; Mentkovsky, Y.L. Inverse Problem of the Theory of Charged Particle Scattering. Ukr. Phys. J. 1969, 13, 1252–1263. [Google Scholar]
- Gugushvili, H.I.; Mentkovsky, Y.L. The Inverse Problem of Scattering Theory and Riemann’s Method. Il Nuovo Cimento 1972, 10, 277–291. [Google Scholar] [CrossRef]
- Matsuno, Y. Reduction of Dispersionless Coupled Korteweg-de Vries Equations to the Euler-Darboux Equation. J. Math. Phys. 2001, 42, 1744–1760. [Google Scholar] [CrossRef]
- Popivanov, N.; Popov, T. Exact Behaviour of Singularities of Protter’s Problem for the 3-D Wave Equation. In Inclusion Methods for Nonlinear Problems; Herzberger, J., Ed.; Springer: New York, NY, USA, 2003; pp. 213–236. [Google Scholar]
- Popivanov, N.; Popov, T.; Scherer, R. Asymptotic Expansions of Singular Solutions for (3 + 1)-D Protter Problems. J. Math. Anal. Appl. 2007, 331, 1093–1112. [Google Scholar] [CrossRef]
- Popivanov, N.; Popov, T.; Scherer, R. Protter-Morawetz Multidimensional Problems. Proc. Steklov Inst. Math. 2012, 278, 179–198. [Google Scholar] [CrossRef]
- Dechevski, L.; Popivanov, N.; Popov, T. Exact Asymptotic Expansion of Singular Solutions for the (2 + 1)-D Protter Problem. Abstr. Appl. Anal. 2012. [Google Scholar] [CrossRef]
- Popivanov, N.; Popov, T.; Tesdall, A. Semi-Fredholm Solvability in the Framework of Singular Solutions for the (3 + 1)-D Protter-Morawetz Problem. Abstr. Appl. Anal. 2014. [Google Scholar] [CrossRef]
- Wright, O.C.; Forest, M.G.; McLaughlin, K.T.-R. On the Exact Solution of the Geometric Optics Approximation of the Defocusing Non-Linear Schrödinger Equation. Phys. Lett. A 1999, 257, 170–174. [Google Scholar] [CrossRef]
- Forest, M.G.; Rosenberg, C.J.; Wright, O.C. On the Exact Solution for Smooth Pulses of the Defocusing nonlinear Schrödinger Modulation Equations Prior to Breaking. Nonlinearity 2009, 9, 2287–2308. [Google Scholar] [CrossRef]
- Shiryaeva, E.V.; Zhukov, M.Y. Hodograph Method and Numerical Integration of Two Hyperbolic Quasilinear Equations. Part I. The Shallow Water Equations; Working Paper; Southern Federal University: Rostov-on-Don, Russia, 2014. [Google Scholar]
- Shiryaeva, E.V.; Zhukov, M.Y. Hodograph Method and Numerical Solution of the Two Hyperbolic Quasilinear Equations System. Part II. Zonal Electrophoresis Equations; Working Paper; Southern Federal University: Rostov-on-Don, Russia, 2014. [Google Scholar]
- Shiryaeva, E.V.; Zhukov, M.Y. Hodograph Method and Numerical Solution of the Two Hyperbolic Quasilinear Equations System. Part III. Two Beam Reduction of the Dense Soliton Gas Equations; Working Paper; Southern Federal University: Rostov-on-Don, Russia, 2014. [Google Scholar]
- Copson, E.T. On the Riemann-Green Function. Arch. Rat. Mech. Anal. 1958, 1, 324–348. [Google Scholar] [CrossRef]
- Riemann, B. Collected Works of Bernhard Riemann; Dover: New York, NY, USA, 1953; pp. 156–175. [Google Scholar]
- Hadamard, J. Lectures on Cauchy’s Problem in Linear Partial Differential Equations; Dover: New York, NY, USA, 1952. [Google Scholar]
- Chaundy, T.W. Hypergeometric Partial Differential Equations (I). Q. J. Math. Oxf. Ser. 1935, 6, 288–303. [Google Scholar] [CrossRef]
- Chaundy, T.W. Hypergeometric Partial Differential Equations (II). Q. J. Math. Oxf. Ser. 1936, 7, 306–315. [Google Scholar] [CrossRef]
- Chaundy, T.W. Partial Differential Equations With Constant Coefficients (II). Q. J. Math. Oxf. Ser. 1937, 8, 280–302. [Google Scholar] [CrossRef]
- Chaundy, T.W. Linear Partial Differential Equations (I). Q. J. Math. Oxf. Ser. 1938, 9, 234–240. [Google Scholar] [CrossRef]
- Chaundy, T.W. Hypergeometric Partial Differential Equations (III). Q. J. Math. Oxf. Ser. 1939, 10, 219–240. [Google Scholar] [CrossRef]
- Chaundy, T.W. Linear Partial Differential Equations (II). Q. J. Math. Oxf. Ser. 1940, 11, 101–110. [Google Scholar] [CrossRef]
- Appell, P.; Kampé de Fériet, J. Fonctions Hypergéométriques et Hypersphériques, Polynomes D’Hermite; Gauthier-Villars: Paris, France, 1926. [Google Scholar]
- Titchmarsh, E.C. Theory of Fourier Integrals; Oxford University Press: London, UK, 1937; pp. 297–298. [Google Scholar]
- Lanckau, E. Die Riemannfunktion Selbstadjungierter Gleichungen. Wiss. Z. Tech. Hochsch. Karl-Marx-Stadt 1979, 21, 535–540. [Google Scholar]
- Erdélyi, A.; Magnus, W.; Oberhettinger, F.; Tricomi, F.G. Higher Transcendental Functions I; McGraw-Hill: New York, NY, USA, 1953. [Google Scholar]
- Henrici, P.A. Survey of I. N. Vekua’s Theory of Elliptic Partial Differential Equations with Analytic Coefficients. Z. Angew. Math. Phys. 1957, 8, 169–202. [Google Scholar] [CrossRef]
- Püngel, J. Zur Darstellung Von Riemannfunktionen Durch Integro Differentialoperatoren. Sitzungsberichte. Abt. 2. Methematik, Astronomie, Physik, Meteorologie Und Technik 1980, 189, 55–66. [Google Scholar]
- Püngel, J. Lineare Abbidungen Zwischen Lösungsmengen Partieller Differentialgleichungen Im Komplexen. Graz Mathematische-Statistiche Sektion; Forschungsgesellschaft Joanneum: Graz, Austria, 1978. [Google Scholar]
- Courant, R.; Hilbert, D. Methods of Mathematical Physics II; Interscience Publishers: New York, NY, USA, 1962. [Google Scholar]
- Cohn, H. The Riemann function for Uxy + H(x + y)U = 0. Duke Math. J. 1947, 14, 297–304. [Google Scholar] [CrossRef]
- Olevskiĭ, M.N. On Riemann’s Function for the Differential Equation (∂2u/∂x2) − (∂2u/∂t2) + [ρ1(x) + ρ2(t)]u = 0. Dokl. Akad. Nauk SSSR 1952, 87, 337–340. [Google Scholar]
- Lie, S. On Integration of a Class of Linear Partial Differential Equations by Means of Definite Integrals. Arch. Math. Bd VI Heft 1881, 3, 328–368. [Google Scholar]
- Bluman, G.W. Construction of Solutions to Partial Differential Equations by the Use of Transformation Groups. Ph.D. Thesis, California Institute Of Technology, Pasadena, CA, USA, 1967. [Google Scholar]
- Daggit, E.A. The Use of Infinitesimal Transformations in Predicting the Form of the Riemann (-Green) Function. J. Math. Anal. Appl. 1970, 29, 91–108. [Google Scholar] [CrossRef]
- Ibragimov, N.H. CRC Handbook of Lie Group Analysis of Differential Equations, Volume 2, Applications in Engineering and Physical Sciences; CRC Press: Boca Raton, FL, USA, 1995; pp. 41–51. [Google Scholar]
- Iwasaki, K. Riemann Function of Harmonic Equation and Appell’s F4. SIAM J. Math. Anal. 1988, 19, 903–917. [Google Scholar] [CrossRef]
- Hille, E. Lectures on Ordinary Differential Equations; Addison Wesley: Reading, MA, USA, 1969. [Google Scholar]
- Vaz, P.T.; Deo, S.G. On a Class of Linear Hyperbolic Differential Equations. Indian J. Pure Appl. Math. 1987, 9, 801–809. [Google Scholar]
- Papadakis, J.S.; Wood, D.H. Addendum: “An Addition Formula for Riemann Functions”. J. Differ. Equ. 1978, 29, 474. [Google Scholar]
- Papadakis, J.S.; Wood, D.H. An Addition Formula for Riemann Functions. J. Differ. Equ. 1977, 24, 397–411. [Google Scholar] [CrossRef]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer: New York, NY, USA, 1996. [Google Scholar]
- Kokinasidi, P.D. Construction of the Riemann Function for Some Hyperbolic Equations. Differ. Uravn. 1983, 19, 703–706. [Google Scholar]
- Johnpillai, I.K.; Mahomed, F.M. Goursat Problem for the Factorizable Hyperbolic Equation in two Independent Variables. Math. Comp. Appl. 2003, 8, 55–62. [Google Scholar] [CrossRef]
- Andrey, A.; Yevgeniya, K.; Anzhelika, V. Construction of the Solution of the Caushy’s Problem by the Riemann’s Method for a Hyperbolic Equation. Am. Res. J. Math. 2015, 1, 44–48. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1993. [Google Scholar]
- Mackie, A.G. Green’s Functions and Riemann’s Method. Proc. Edinb. Math. Soc. 1964, 14, 293–302. [Google Scholar] [CrossRef]
- Wood, D.H. Simple Riemann Functions. Bull. Am. Math. Soc. 1976, 82, 737–739. [Google Scholar] [CrossRef]
- Clarkson, P.A.; Kruskal, M.D. New Similarity Reductions of the Boussinesq Equation. J. Math. Phys. 1989, 30, 2201–2213. [Google Scholar] [CrossRef]
- Geddes, R.L.; Mackie, A.G. Riemann Functions for Self-adjoint Equations. Appl. Anal. 1977, 7, 43–47. [Google Scholar] [CrossRef]
- Bluman, G.W. On Mapping Linear Partial Differential Equations to Constant Coefficient Equations. SIAM J. Appl. Math. 1983, 43, 1259–1273. [Google Scholar] [CrossRef]
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Academic Press: New York, NY, USA, 1982; pp. 105–117. [Google Scholar]
- Miller, W., Jr. Lie Theory and Special Functions; Academic: New York, NY, USA, 1968. [Google Scholar]
- Scott, E.J. Determination of the Riemann Function. Am. Math. Mon. 1973, 80, 907–909. [Google Scholar] [CrossRef]
- Wahlberg, C. Riemann’s Function for a Klein-Gordon Equation with a Non-Constant Coefficient. J. Phys. A Math. Gen. 1977, 10, 867–878. [Google Scholar] [CrossRef]
- Ince, E.L. Ordinary Differential Equations; Dover: New York, NY, USA, 1956; p. 466. [Google Scholar]
- Du, X.H. A Note on Olevskii’s Formula for Self-Adjoint Hyperbolic Equations of the Second Order. Kexue Tongbao 1981, 26, 869–873. [Google Scholar]
- Zeitsch, P.J. Symmetry Operators for Riemann’s Method. J. Math. Phys. 2004, 45, 2993–3000. [Google Scholar] [CrossRef]
- Zeitsch, P.J. Riemann Functions and the Group E(1, 1). J. Math. Phys. 2004, 45, 3001–3018. [Google Scholar] [CrossRef]
- Miller, W., Jr. Symmetry and Separation of Variables; Addison-Wesley: London, UK, 1977. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions; Dover: New York, NY, USA, 1965. [Google Scholar]
- Bauer, K.W. On a Class of Riemann Functions. Appl. Anal. 1982, 13, 109–126. [Google Scholar] [CrossRef]
- Bauer, K.W. On the Determination of Riemann Functions. Complex Var. Theory Appl. 1987, 8, 195–203. [Google Scholar] [CrossRef]
- Markett, C.; Püngell, J.; Wallner, H. Multiple Power Series Representations for Riemann Functions of Self-Adjoint Equations. Appl. Anal. 1990, 38, 179–199. [Google Scholar] [CrossRef]
- Vekua, I.N. New Methods for Solving Elliptic Equations; North Holland Publish. Co.: Amsterdam, The Netherlands, 1968. [Google Scholar]
- Lerner, M.E. Qualitative Properties of the Riemann Function. Differ. Equ. 1992, 27, 1495–1508. [Google Scholar]
- Wallner, H. Die Riemannfunktion der Differentialgleichung Wzζ+[z+φ′(ζ)]W = 0. Arch. Math. 1981, 37, 435–442. [Google Scholar] [CrossRef]
- Zhegalov, V.I.; Kotukhov, M.P. On Integral Equations for Riemann Function. Russ. Math. (Iz. VUZ) 1998, 42, 24–28. [Google Scholar]
- Zhegalov, V.I. On the three-dimensional Riemann Function. Sib. Math. J. 1998, 38, 929–934. [Google Scholar] [CrossRef]
- Koshcheeva, O.A. Construction of the Riemann Function for the Bianchi Equation in an n-Dimensional Space. Russ. Math. (Iz. VUZ) 2008, 52, 35–40. [Google Scholar] [CrossRef]
Figure 1.
The Initial Curve.

© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zeitsch, P.J. On the Riemann Function. Mathematics 2018, 6, 316. https://doi.org/10.3390/math6120316
AMA Style
Zeitsch PJ. On the Riemann Function. Mathematics. 2018; 6(12):316. https://doi.org/10.3390/math6120316
Chicago/Turabian StyleZeitsch, Peter J. 2018. "On the Riemann Function" Mathematics 6, no. 12: 316. https://doi.org/10.3390/math6120316
APA StyleZeitsch, P. J. (2018). On the Riemann Function. Mathematics, 6(12), 316. https://doi.org/10.3390/math6120316
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.