
Fault Diagnosis of Power Transformer in One-Key Sequential Control System of Intelligent Substation Based on a Transformer Neural Network Model

Abstract
:1. Introduction
2. Intelligent Substation
2.1. Comparison between Intelligent Substation and Traditional Substation
- 1.
- Automation Level: Intelligent substations employ advanced automation technologies and digital control systems, enabling functionalities such as remote monitoring, intelligent diagnosis, and fault prediction. Figure 1 depicts a remote monitoring device. In contrast, traditional substations heavily rely on manual operations and simple control equipment.
- 2.
- Data Processing Capability: Intelligent substations can collect a vast amount of data in real time and process it through techniques like data analysis and artificial intelligence, enhancing the efficiency and security of the power grid operation. Conversely, traditional substations have relatively weaker data processing capabilities, mainly relying on manual data analysis and handling.
- 3.
- Equipment Status Monitoring: Intelligent substations are equipped with various sensors and monitoring devices that can monitor parameters such as equipment operation status, temperature, and vibration in real time, promptly detecting equipment anomalies and issuing warnings. Figure 2 shows an intelligent inspection robot. Traditional substations typically require manual inspections and regular maintenance.
- 4.
- Response Speed: Due to the adoption of advanced control systems and communication technologies, intelligent substations can quickly respond to changes and faults in the power grid, improving the response speed and reliability of the power system.
- 5.
- Safety and Reliability: Intelligent substations can identify potential fault risks in a timely manner through data analysis and intelligent algorithms, taking preventive measures to enhance the safety and reliability of the power grid operation. In contrast, traditional substations rely more on manual experience and regular maintenance to ensure safety.
2.2. The Short-Circuit Current Level of the Intelligent Substation
- The short-circuit current for the 110 kV voltage level is 40 kA.
- The short-circuit current for the 10 kV voltage level is as follows: 40 kA for the main transformer incoming line and sectional isolators and 31.5 kA for the outgoing lines of 10 kV, 10 kV capacitor banks, 10 kV grounding transformers, and parallel low-resistance sets of arc suppression coils.
3. One-Key Sequential Control System
3.1. Overview
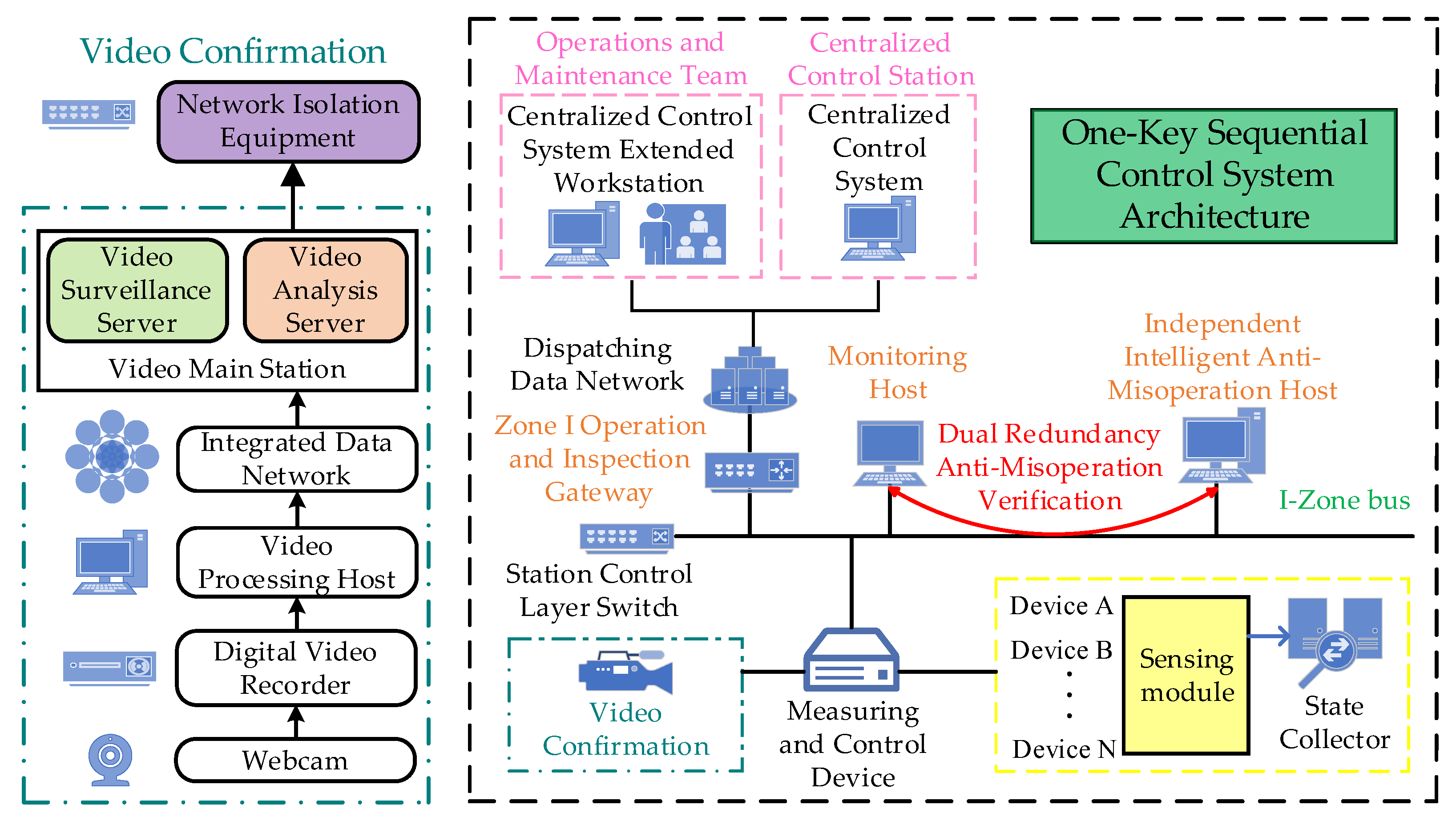
3.2. The Platform Architecture of One-Key Sequential Control System
3.3. Execution of One-Key Sequential Control Operation
3.3.1. Determination of Device Status
3.3.2. Generation of Operation Tickets
3.3.3. Simulation Rehearsal and Instruction Execution of Operation Tickets
3.4. The Main Problems with the One-Key Sequential Control System
3.4.1. Low Data Transmission Efficiency and Long System Response Time
3.4.2. Low Data Quality and Low Data Accuracy
3.4.3. Lack of Monitoring and Diagnosis of Equipment Failures
4. Types of Power Transformer Faults
4.1. Thermal Faults
- Overheating of windings: Prolonged operation at loads exceeding rated capacity can cause overheating of windings and insulation materials, ultimately leading to insulation aging, winding short circuits, or other internal faults.
- Cooling system failure: The transformer’s cooling system includes components such as cooling oil and radiators. If the cooling system fails, such as due to oil leaks, radiator blockages, or improper cooling system design, the transformer may not effectively dissipate heat, leading to overheating.
- Insulation aging: After years of operation, distribution transformers may experience insulation expansion, resulting in blocked oil passages between winding sections, poor oil flow, and insufficient cooling of inter-turn insulation, and aging insulation layers may peel off under prolonged electromagnetic vibration, leading to inter-turn or inter-segment short circuits and eventual transformer failure [10].
- Overheating of tap changers: Mechanical wear, electrical corrosion, and contact contamination resulting from long-term switching operations can cause poor contact, loosening, and overheating of tap changers.
- Faults in transformer leads: Broken leads, poor contact of lead joints, and loose conducting rods can increase contact resistance, generating excessive heat during current flow and leading to localized overheating.
- Magnetic circuit overheating: During operation, transformers generate stray magnetic fields, and eddy currents generated in areas with high stray magnetic flux can cause significant heat buildup, leading to localized overheating.
- High ambient temperatures: If transformers are installed in locations with excessively high ambient temperatures or poor ventilation, the transformer itself may overheat.
4.2. Discharge Faults
- Partial discharge: Partial discharge is a localized electrical discharge phenomenon that occurs in the insulation system due to defects in insulation materials, air bubbles, or impurities in the oil. Partial discharge can lead to insulation material damage, gas generation, oil contamination, and accelerated transformer aging.
- Oil discharge: If the insulation oil in the transformer is contaminated or the gas dissolution rate increases abnormally, it may lead to oil discharge phenomena. Oil discharge can generate gas, heat, and sediment, leading to oil contamination, decreased insulation performance, and equipment damage.
- Flashover discharge: Flashover discharge is a sudden discharge phenomenon that occurs on the surface of insulation or between windings, usually due to insufficient insulation strength or excessive voltage stress. Flashover discharge can lead to insulation material damage, thereby reducing the insulation performance of the transformer.
- External discharge: External discharge refers to discharge phenomena occurring in the atmospheric environment around the transformer, possibly caused by lightning, arcing, pollution, etc. External discharge can generate high-energy arcs, causing severe damage to the transformer.
4.3. One Fault Detection Method for Transformers
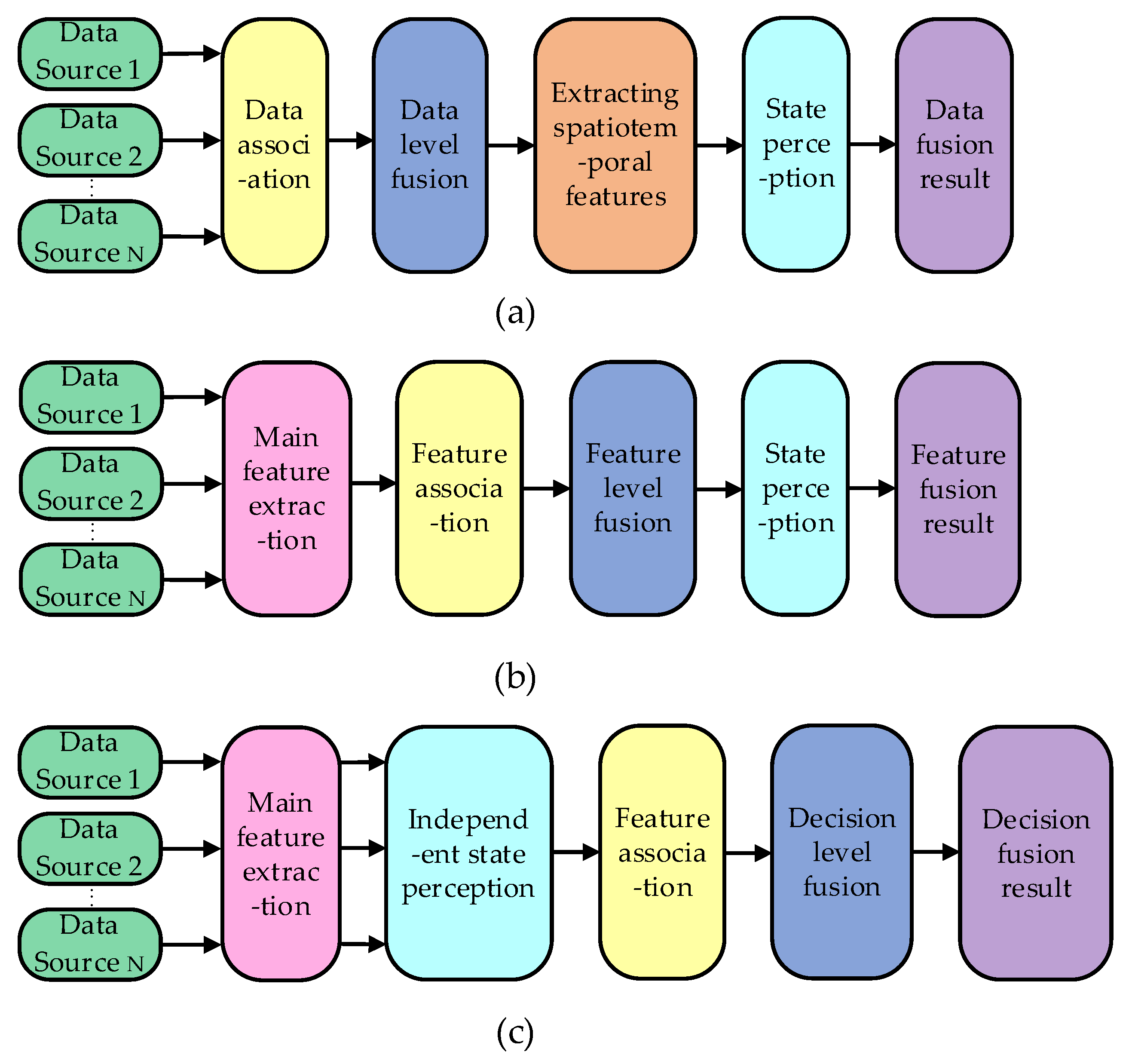
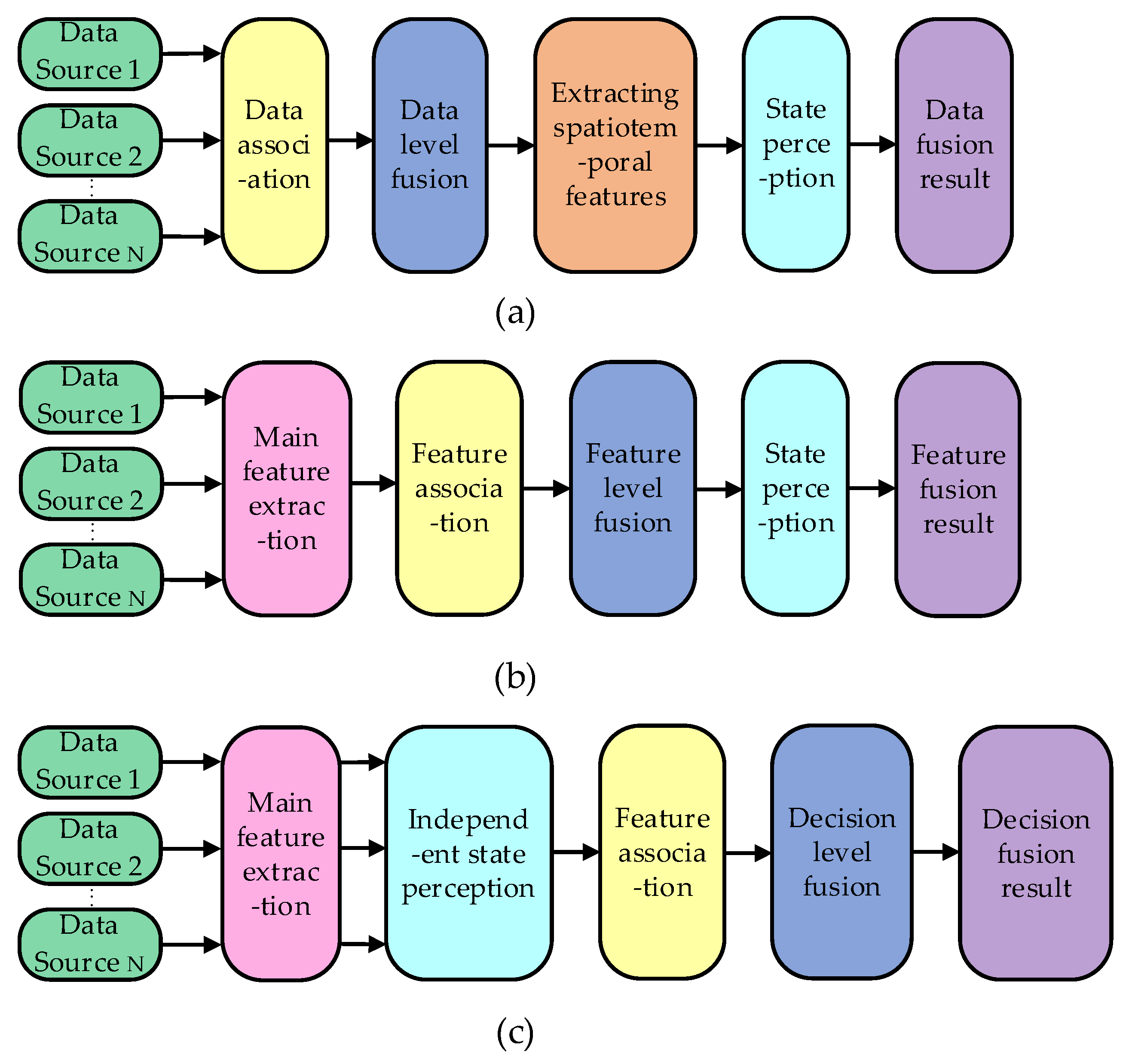
5. Data Fusion
6. Power Transformer-Transformer Neural Network
6.1. Overview
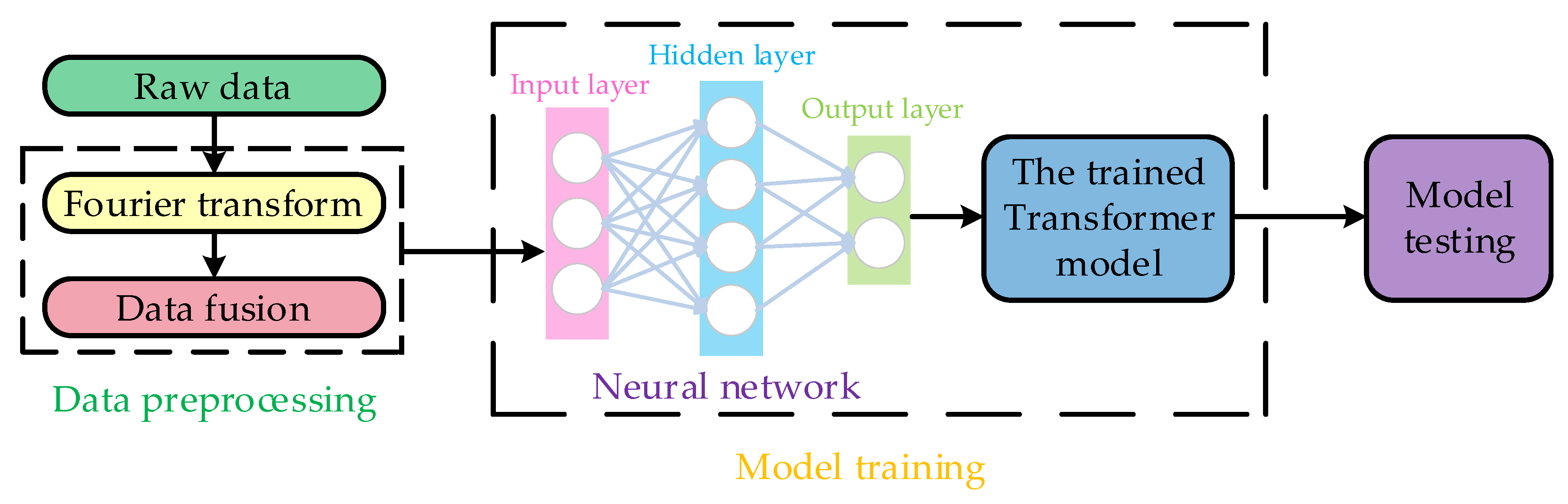
6.2. Data Preprocessing
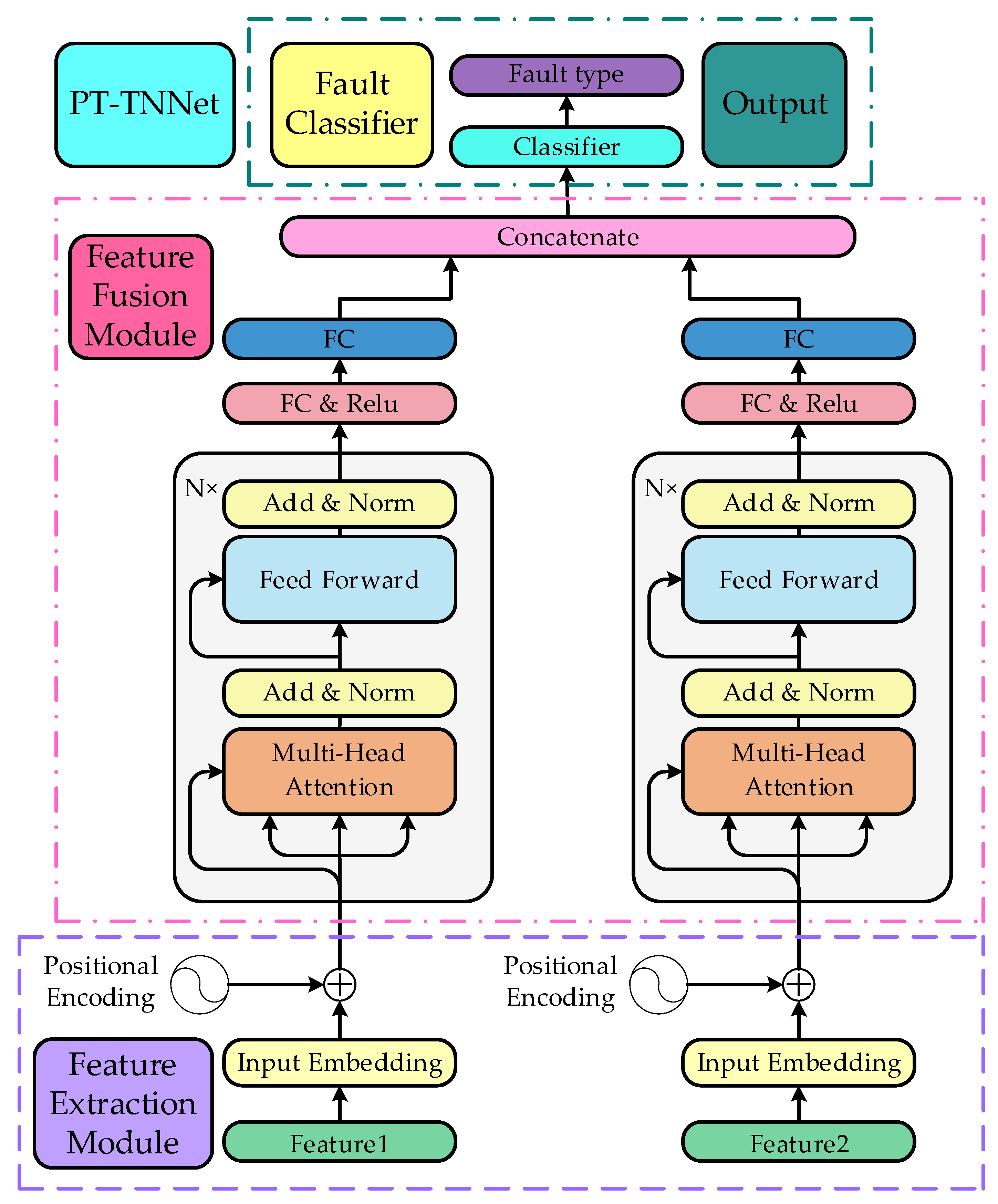
6.3. Design of PT-TNNet Model
6.3.1. Positional Encoding
6.3.2. Transformer Encoder
6.3.3. Structure of PT-TNNet
7. Experimental Results
7.1. Dataset Description and Evaluation Metrics
- 1.
- Winding Temperature
- 2.
- Oil Temperature
- 3.
- Ambient Temperature
7.2. Input Data Ablation Validation
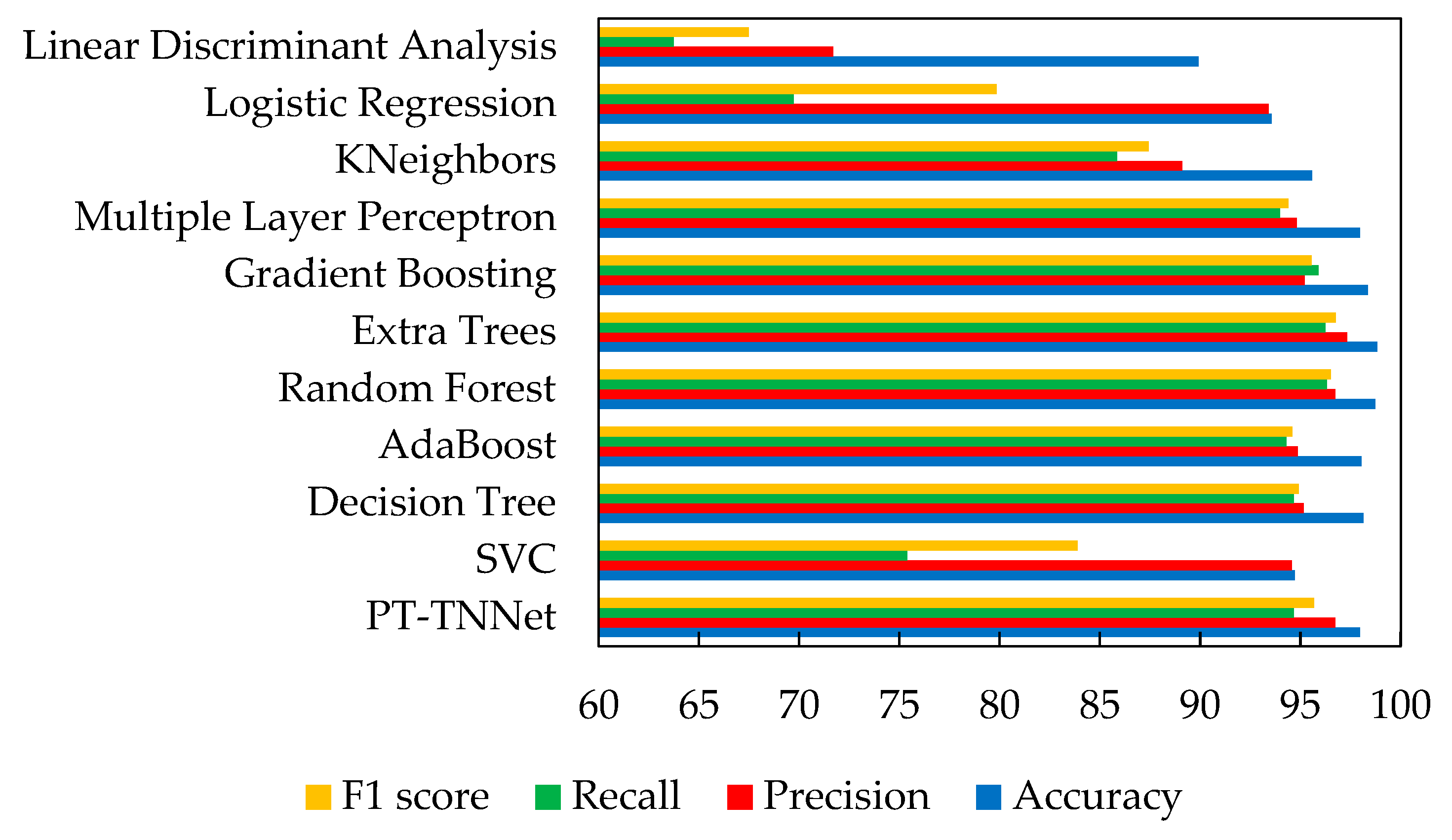
7.3. Analysis of Results and Comparison with Different Methods
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Cai, F.; Lv, C.; Shuai, M. A fish eye recognition algorithm for switch on/off key in sequence control substation. In Proceedings of the 2020 2nd International Conference on Information Technology and Computer Application (ITCA), Guangzhou, China, 18–20 December 2020; pp. 143–146. [Google Scholar]
- Wang, Y.; Li, H.; Shiping, E.; Zhang, K.; Chen, Q.; Guo, Y.; Ye, C. Research on intelligent anti-misoperation technology applied to substation one-button sequential control. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 258–261. [Google Scholar]
- Xiong, Z.; Gan, X.; Gao, Y.; Li, Y.; Ding, D.; Tian, Y. Study on Application of One Key Sequence Control in 750 kV Substation. In Proceedings of the 2021 6th Asia Conference on Power and Electrical Engineering (ACPEE), Chongqing, China, 8–11 April 2021; pp. 269–274. [Google Scholar]
- Wang, X.; Chen, C.; Liang, Y.; Zhou, C. Upgrading Application of One-Key Sequence Control in Substation Automation System. In Proceedings of the 2023 9th International Conference on Electrical Engineering, Control and Robotics (EECR), Wuhan, China, 24–26 February 2023; pp. 1–4. [Google Scholar]
- Ameli, A.; Ghafouri, M.; Zeineldin, H.H.; Salama, M.M.; El-Saadany, E.F. Accurate fault diagnosis in transformers using an auxiliary current-compensation-based framework for differential relays. IEEE Trans. Instrum. Meas. 2021, 70, 9004214. [Google Scholar] [CrossRef]
- Khan, S.A.; Equbal, M.D.; Islam, T. A comprehensive comparative study of DGA based transformer fault diagnosis using fuzzy logic and ANFIS models. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 590–596. [Google Scholar] [CrossRef]
- Qi, B.; Wang, Y.; Zhang, P.; Li, C.; Wang, H.; Chen, J. A novel self-decision fault diagnosis model based on state-oriented correction for power transformer. IEEE Trans. Dielectr. Electr. Insul. 2020, 27, 1778–1786. [Google Scholar] [CrossRef]
- Kari, T.; Gao, W.; Zhao, D.; Zhang, Z.; Mo, W.; Wang, Y.; Luan, L. An integrated method of ANFIS and Dempster-Shafer theory for fault diagnosis of power transformer. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 360–371. [Google Scholar] [CrossRef]
- Wang, X.; Li, Q.; Li, C.; Yang, R.; Su, Q. Reliability assessment of the fault diagnosis methodologies for transformers and a new diagnostic scheme based on fault info integration. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2292–2298. [Google Scholar] [CrossRef]
- Dai, J.; Song, H.; Sheng, G.; Jiang, X. Dissolved gas analysis of insulating oil for power transformer fault diagnosis with deep belief network. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 2828–2835. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.; Wang, K.; Wang, J.; Zhou, T.; Zhang, Y. Optimal dissolved gas ratios selected by genetic algorithm for power transformer fault diagnosis based on support vector machine. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 1198–1206. [Google Scholar] [CrossRef]
- Liao, W.; Zhang, Y.; Cao, D.; Ishizaki, T.; Yang, Z.; Yang, D. Explainable Fault Diagnosis of Oil-Immersed Transformers: A Glass-Box Model. IEEE Trans. Instrum. Meas. 2024, 73, 2506204. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, K.; Ma, H.; Yu, K.; Ren, Z.; Liu, Z. MMFNet: Multisensor data and multiscale feature fusion model for intelligent cross-domain machinery fault diagnosis. IEEE Trans. Instrum. Meas. 2022, 71, 3526311. [Google Scholar] [CrossRef]
- Huang, Z.; Zhou, J.; Huang, W.; Liu, Y.; Zhu, G.; Zhang, K. Multiple classifiers based information fusion for power transformer fault diagnosis. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; pp. 2971–2975. [Google Scholar]
- Wu, H.; Qiao, Z.; Zhang, Y.; Ji, X. Real-time Monitoring of Smart Grid Terminals based on Multi-dimensional Information Fusion. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; pp. 3812–3816. [Google Scholar]
- Zhang, L.; Xie, Y.; Xidao, L.; Zhang, X. Multi-source heterogeneous data fusion. In Proceedings of the 2018 International conference on artificial intelligence and big data (ICAIBD), Chengdu, China, 26–28 May 2018; pp. 47–51. [Google Scholar]
- Wu, B.; Hu, Y. Analysis of substation joint safety control system and model based on multi-source heterogeneous data fusion. IEEE Access 2023, 11, 35281–35297. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Y.; Cui, N.; Xu, D.; Li, J. An effective data fusion model for detecting the risk of transmission line in smart grid. IEEE Internet Things J. 2021, 9, 22256–22266. [Google Scholar] [CrossRef]
- Wu, Y.; Sheng, Y.; Guo, N.; Li, F.; Tian, Y.; Su, X. Hybrid Deep Network Based Multi-Source Sensing Data Fusion for FDIA Detection in Smart Grid. In Proceedings of the 2022 Asia Power and Electrical Technology Conference (APET), Shanghai, China, 11–13 November 2022; pp. 310–315. [Google Scholar]
- Bai, W.; Zhang, D.; An, C.; Chang, P.; Yang, H. Abnormal Detection Scheme of Substation Equipment based on Intelligent Fusion Terminal. In Proceedings of the 2023 4th Information Communication Technologies Conference (ICTC), Nanjing, China, 17–19 May 2023; pp. 384–389. [Google Scholar]
- Weng, C.; Lu, B.; Gu, Q.; Zhao, X. A Novel Multisensor Fusion Transformer and Its Application into Rotating Machinery Fault Diagnosis. IEEE Trans. Instrum. Meas. 2023, 72, 3507512. [Google Scholar] [CrossRef]
- Lu, Z.; Liang, L.; Zhu, J.; Zou, W.; Mao, L. Rotating Machinery Fault Diagnosis Under Multiple Working Conditions via A Time Series Transformer Enhanced by Convolutional Neural Network. IEEE Trans. Instrum. Meas. 2023, 72, 3533611. [Google Scholar] [CrossRef]
- Wu, H.; Huang, P.; Zhang, M.; Tang, W. CTFNet: CNN-Transformer Fusion Network for Remote Sensing Image Semantic Segmentation. IEEE Geosci. Remote Sens. Lett. 2024, 21, 5000305. [Google Scholar] [CrossRef]
- Yan, J.; Wang, Y.; Yang, Z.; Ding, Y.; Wang, J.; Geng, Y. Few-Shot Mechanical Fault Diagnosis for a High-Voltage Circuit Breaker via a Transformer-Convolutional Neural Network and Metric Meta-learning. IEEE Trans. Instrum. Meas. 2023, 72, 3528011. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Feng, Z.; Jin, R.; Luo, C. Transformer State Monitoring based on Transformer Neural Network. Foreign Electron. Meas. Technol. 2023, 42, 145–150. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Number of Samples: 14,760 Rows × 4 Columns (Including the First Column, Which Is the Device Time Stamp.) | |||
|---|---|---|---|
| Number of Valid Samples | Number of Invalid Samples | ||
| Number of Samples during Normal Operation | Number of Samples during Fault Occurrence | ||
| Winding Temperature | 14,354 | 242 | 164 |
| Oil Temperature | 14,335 | 239 | 186 |
| Ambient Temperature | 14,294 | 246 | 220 |
| Methods | Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) |
|---|---|---|---|---|
| PT-TNNet | 95.68 | 94.25 | 95.46 | 94.85 |
| SVC | 85.28 | 81.61 | 90.14 | 85.66 |
| Decision Tree | 90.44 | 87.13 | 87.84 | 87.48 |
| AdaBoost | 91.37 | 88.3 | 89.14 | 88.71 |
| Random Forest | 92.45 | 90.36 | 93.23 | 91.77 |
| Extra Trees | 92.58 | 90.66 | 93.07 | 91.81 |
| Gradient Boosting | 90.99 | 87.07 | 90.99 | 88.98 |
| Multiple Layer Perceptron | 86.06 | 81.74 | 89.01 | 85.22 |
| KNeighbors | 90.39 | 86.61 | 89.08 | 87.82 |
| Logistic Regression | 85.26 | 80.65 | 87.05 | 83.72 |
| Linear Discriminant Analysis | 84.01 | 80.36 | 88.63 | 84.29 |
| Methods | Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) |
|---|---|---|---|---|
| PT-TNNet | 99.95 | 99.89 | 95.45 | 97.61 |
| SVC | 99.79 | 99.89 | 70.45 | 82.62 |
| Decision Tree | 99.95 | 97.6 | 95.45 | 96.5 |
| AdaBoost | 99.95 | 97.6 | 95.45 | 96.5 |
| Random Forest | 99.9 | 94.97 | 90.89 | 92.88 |
| Extra Trees | 99.95 | 97.6 | 95.45 | 96.5 |
| Gradient Boosting | 99.92 | 95.21 | 93.17 | 94.17 |
| Multiple Layer Perceptron | 99.79 | 99.89 | 70.45 | 82.62 |
| KNeighbors | 99.8 | 87.44 | 84.05 | 85.7 |
| Logistic Regression | 99.79 | 99.89 | 70.45 | 82.62 |
| Linear Discriminant Analysis | 99.79 | 99.89 | 70.45 | 82.62 |
| Methods | Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) |
|---|---|---|---|---|
| PT-TNNet | 97.96 | 96.72 | 94.65 | 95.67 |
| SVC | 94.71 | 94.56 | 75.39 | 83.89 |
| Decision Tree | 98.14 | 95.16 | 94.65 | 94.9 |
| AdaBoost | 98.03 | 94.87 | 94.3 | 94.58 |
| Random Forest | 98.73 | 96.72 | 96.32 | 96.52 |
| Extra Trees | 98.83 | 97.31 | 96.23 | 96.76 |
| Gradient Boosting | 98.36 | 95.2 | 95.9 | 95.54 |
| Multiple Layer Perceptron | 97.96 | 94.81 | 93.98 | 94.39 |
| KNeighbors | 95.57 | 89.1 | 85.85 | 87.44 |
| Logistic Regression | 93.57 | 93.42 | 69.72 | 79.84 |
| Linear Discriminant Analysis | 89.92 | 71.7 | 63.73 | 67.48 |
| Methods | CrossValMeans | CrossValErrors |
|---|---|---|
| PT-TNNet | 0.964832 | 0.005056 |
| Random Forest | 0.933822 | 0.005558 |
| Extra Trees | 0.938290 | 0.004977 |
| Methods | CrossValMeans | CrossValErrors |
|---|---|---|
| PT-TNNet | 0.999142 | 0.000682 |
| Random Forest | 0.999162 | 0.000814 |
| Extra Trees | 0.999023 | 0.000640 |
| Input Data | Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) |
|---|---|---|---|---|
| Winding temperature | 95.68 | 94.25 | 95.46 | 94.85 |
| Oil temperature | 99.95 | 99.89 | 95.45 | 97.61 |
| Ambient temperature | 97.96 | 96.72 | 94.65 | 95.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Fu, Z.; Zhang, Z.; Wang, W.; Chen, H.; Xu, D. Fault Diagnosis of Power Transformer in One-Key Sequential Control System of Intelligent Substation Based on a Transformer Neural Network Model. Processes 2024, 12, 824. https://doi.org/10.3390/pr12040824
Wang C, Fu Z, Zhang Z, Wang W, Chen H, Xu D. Fault Diagnosis of Power Transformer in One-Key Sequential Control System of Intelligent Substation Based on a Transformer Neural Network Model. Processes. 2024; 12(4):824. https://doi.org/10.3390/pr12040824
Chicago/Turabian StyleWang, Cheng, Zhixin Fu, Zheng Zhang, Weiping Wang, Huatai Chen, and Da Xu. 2024. "Fault Diagnosis of Power Transformer in One-Key Sequential Control System of Intelligent Substation Based on a Transformer Neural Network Model" Processes 12, no. 4: 824. https://doi.org/10.3390/pr12040824