Numerical Solution of Stochastic Generalized Fractional Diffusion Equation by Finite Difference Method


1
Department of Mathematics, Lorestan University, Khorramabad 68137-17133, Iran
2
Department of Statistics, Lorestan University, Khorramabad 68137-17133, Iran
*
Author to whom correspondence should be addressed.
Math. Comput. Appl. 2018, 23(4), 53; https://doi.org/10.3390/mca23040053
Submission received: 6 July 2018
/
Revised: 25 September 2018
/
Accepted: 25 September 2018
/
Published: 26 September 2018
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:The present study aimed at solving the stochastic generalized fractional diffusion equation (SGFDE) by means of the random finite difference method (FDM). Moreover, the conditions of mean square convergence of the numerical solution are studied and numerical examples are presented to demonstrate the validity and accuracy of the method.
1. Introduction
Many time-dependent processes in science have elements of randomness. In fact, most of the problems in epidemiology and financial mathematics take stochastic effects into account and generally lead to stochastic differential equations (SDEs) [1]. More recently, the development of numerical methods for the approximation of SDEs has become a field of increasing interest, since analytical solutions of SDEs are not usually available [2]. In recent years, some of the main numerical methods for solving stochastic partial differential equations (SPDEs), like finite difference and finite element schemes, have been considered [3,4,5] (e.g., [6,7,8]), based on a finite difference scheme in both space and time.
The field of fractional calculus is almost as old as calculus itself, but over the last few decades the usefulness of this mathematical theory in applications as well as its merits in pure mathematics has become increasingly evident. Although there are too many papers and books in this field to comprehensively address here, we refer readers to some of the main references [9,10,11,12,13,14,15,16].
In this paper, we used generalizations of fractional derivatives as well as applications from [17] and references therein. The generalized fractional diffusion equations can be considered with random parameters imposed by environmental factors on the problem. Addressing such equations with random terms is closer to actual problem modeling. The exact solution of these equations is not possible in general cases. Therefore, efficient numerical methods can be used to describe the solution of these equations. In the current study, we attempt to present an SGFDE and introduce a numerical method based on finite difference for it. We also analyzed the convergence and stability of the proposed method by specific theorems.
This paper is organized as follows: In Section 2, important preliminaries are discussed, and the new generalized fractional derivative (GFD) is introduced. The numerical scheme is shown in Section 3. Section 4 gives convergence analysis. The numerical examples are provided in Section 5, and conclusions in Section 6.
2. Preliminaries
In this section, we present significant preliminaries of generalized fractional calculus and mean square calculus.
2.1. Generalized Fractional Calculus
Definition 1
([18]). Left/forward generalized fractional integral (GFI) of order of a function , with respect to a scale function and a weight function , is defined as
provided the integral exists.
Definition 2
([18]). Left/forward GFD of order 1 of a function , with respect to a scale function and a weight function , is defined as
provided the right side of the equation is finite.
Definition 3
([18]). Left/forward GFD of order m of a function , with respect to a scale function and a weight function , is defined as
provided the right side of the equation is finite, where m is a positive integer.
Definition 4
([18]). Left/forward R-L type GFD of order of a function , with respect to a scale function and a weight function , is defined as
provided the right side of the equation is finite, where , and m is a positive integer.
Definition 5
([18]). Left/forward Caputo type GFD of order of a function , with respect to a scale function and a weight function , is defined as
provided the right side of the equation is finite, where , and m is a positive integer.
In the above definitions, we only listed the “left/forward” sense of GFIs and GFDs. As it is the same with classical fractional integrals and fractional derivatives, they can be defined in the “right/backward” sense, which are referred to in [18]. We will not repeat them here since the derivative of GFDEs considered in this paper is the left Caputo-type GTFD.
Remark 1.
The properties of various fractional integrals and fractional derivatives can be seen in ([19], Chapter 2). The R-L fractional derivatives are closely related to the Caputo fractional derivatives. These two derivatives are used in many areas. The R-L fractional derivative is usually discussed in pure mathematical problems, while the Caputo fractional derivative is always employed for depicting the real-world models, since the initial and boundary conditions required are of classical style.
2.2. Mean Square Calculus
Definition 6
Definition 7
([5]). A stochastic difference scheme approximating SPDE is consistent in mean square at time , if for any differentiable function , we have in mean square
as , , , , and .
Definition 8
([5]). A stochastic difference scheme is stable in mean square if there are positive constants ε, δ and constants k, b such that
for all , , and .
Definition 9
([5]). A stochastic difference scheme approximating SPDE is convergent in mean square at time if
as , , , , and .
3. Stochastic Generalized Fractional Diffusion Equations and Numerical Scheme
In this section, we propose an SGFDE and introduce the finite difference method (FDM) to solve this equation.
3.1. Statement of SGFDEs
According to Equations (1), (2), and (5), the generalized time-fractional derivative (GTFD) of is defined as
where , and .
Now, we define a class of stochastic generalized time-fractional diffusion equations as:
where is the fractional order, is the diffusion coefficient, denotes the space-time white noise process, and is a constant. When and , Equation (7) becomes the common SFDEs. We restrict Equation (7) on a bounded domain . Generally, and can be nonzero functions depending on t. However, for simplicity, we will set in the following discussion. The numerical scheme for solving Equation (7) is discussed below.
3.2. Numerical Scheme
In this part, we introduce the FDM to solve Equation (7) with initial condition and zero-boundary conditions. Without loss of generality, we consider Equation (7) on the bounded regular domain with an equispaced mesh. Let and , the mesh points are , where , and . For simplicity in the following discussion, we denote , , and .
The GTFD at the mesh point can be approximated as:
where
and
The second-order derivative in Equation (7) can be approximated by
and
for .
4. Convergence
The following theorem plays an important role in verifying the convergence and stability of the FDM.
Theorem 1
(A Stochastic Version of Lax-Richtmyer, [20]). A random difference scheme approximating SPDE is convergent in mean square at time if it is consistent and stable in mean square.
From FDM presented by Equation (12), we have the following stability theorem.
Theorem 2.
The numerical scheme in Equation (12) is stable, and hence is convergent, if and only if the coefficient matrix satisfies
with
where , and for all .
Proof.
Note that matrix is strictly diagonally dominant for every j. Therefore is invertible, and Equation (14) is solvable. Now we rewrite Equation (12) in an iteration form
where and I denotes the identity matrix. Equation (15) is formed as a recurrence relation and allows us to compute by using . Thus, if denoting the exact solution of by , we have
for all , where
Let be the a posteriori error. By Equations (15) and (16), we get
where the matrix is called the amplification matrix.
The amplification matrix Q belongs to the algebra of size (see [21,22] and references therein), and hence its eigenvalues are explicitly known so that (see [23]):
with
Furthermore, the algebra is a subset of the normal matrices and hence the spectral radius coincides with the induced Euclidean norm. Hence, in our setting we have
which coincides with
It is easy to conclude that Equation (17) implies the consistence of the numerical scheme.
We assume that since the initial condition is known, then we can easily deduce that
for . By the assumption of , we have
for . This completes the proof. ☐
5. Numerical Examples
We solve all examples by means of FDM with .
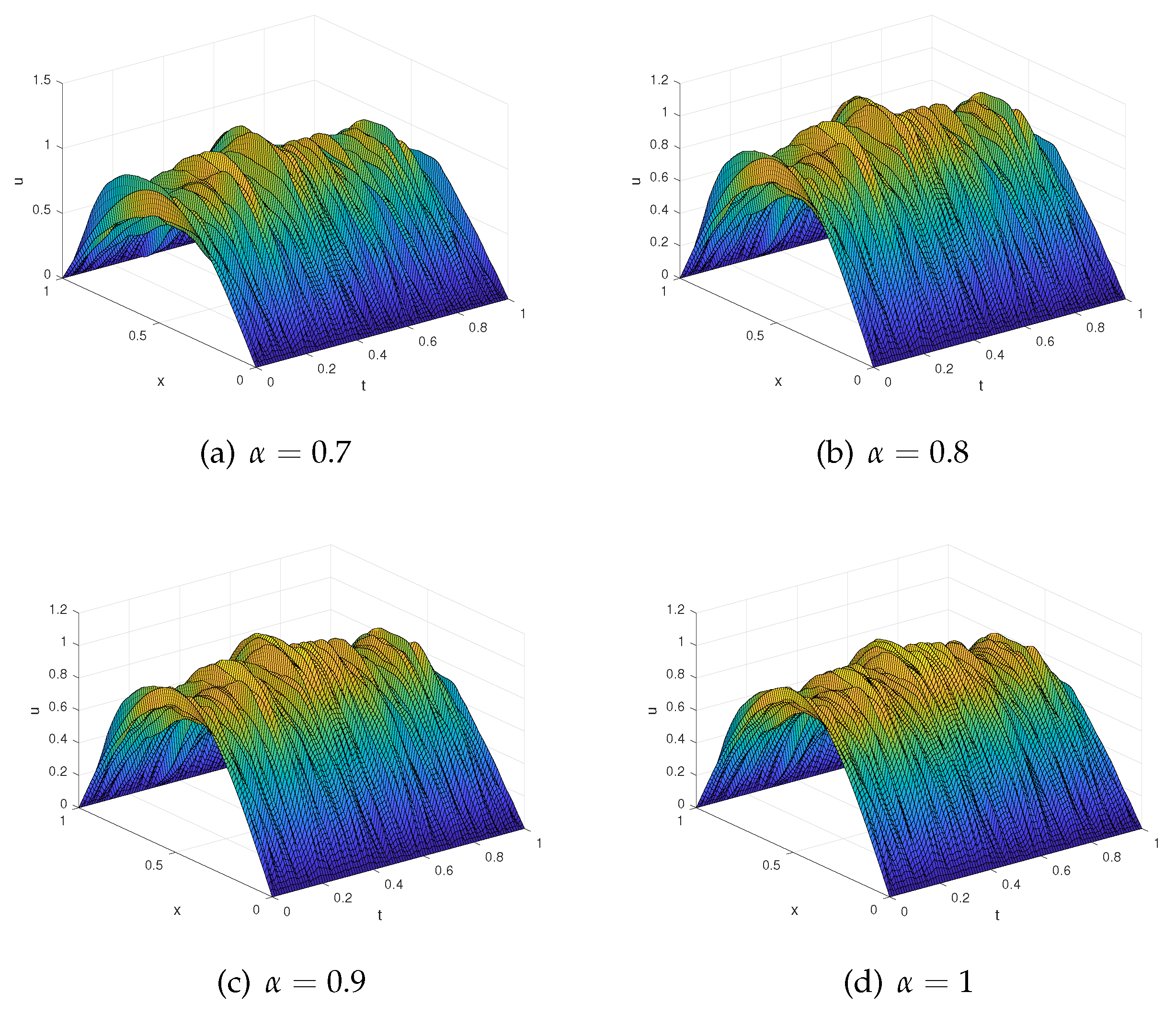
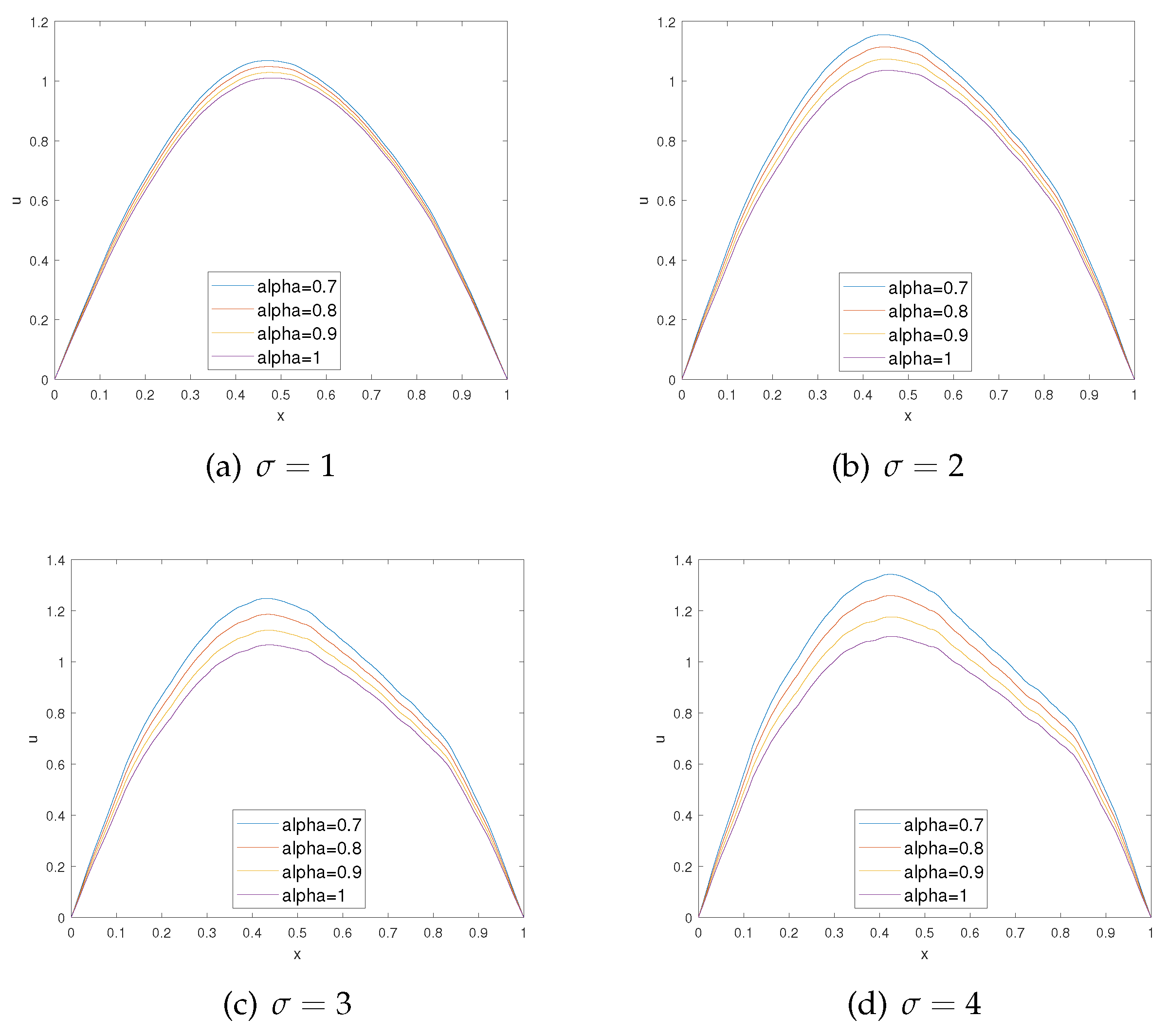
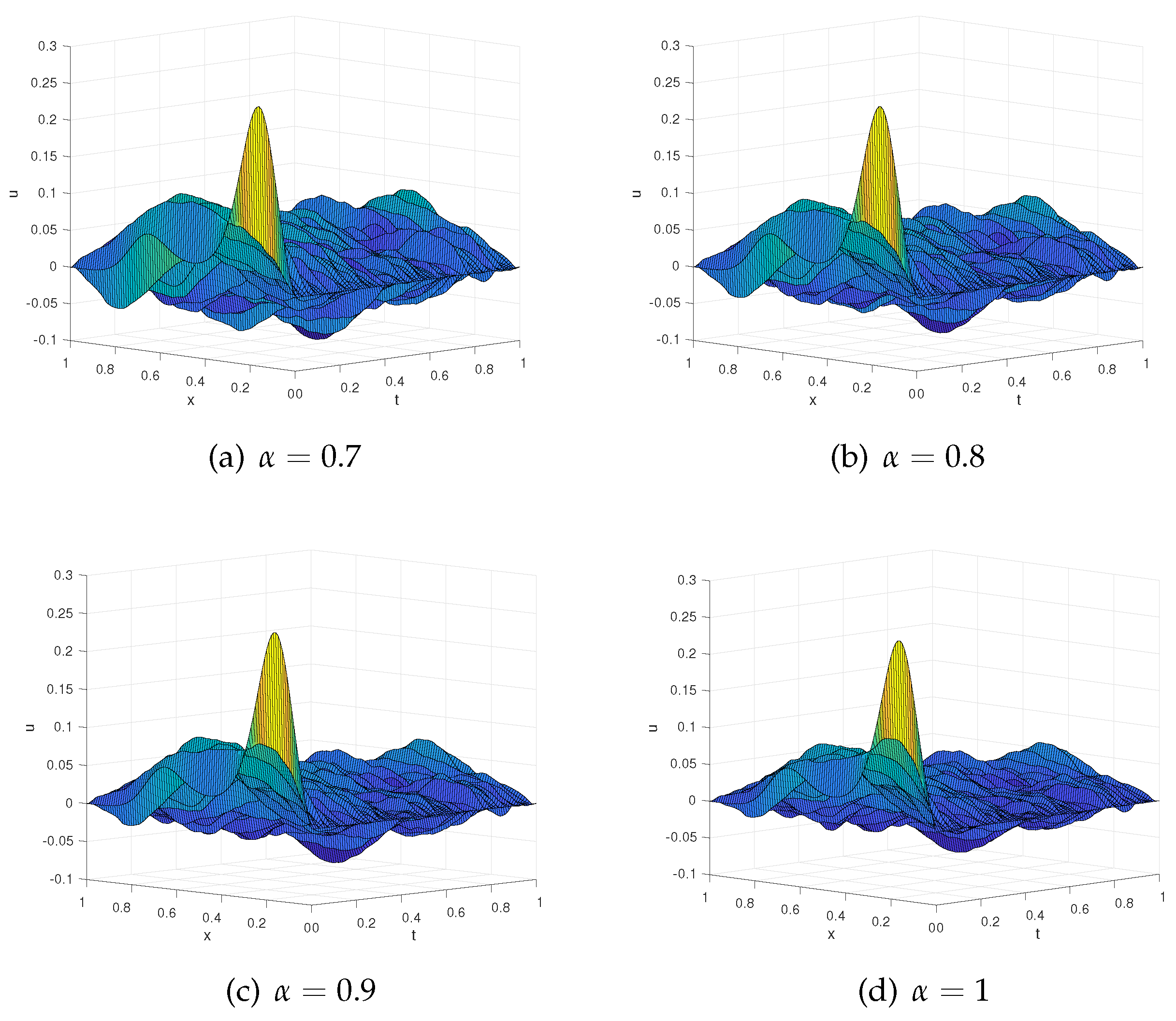
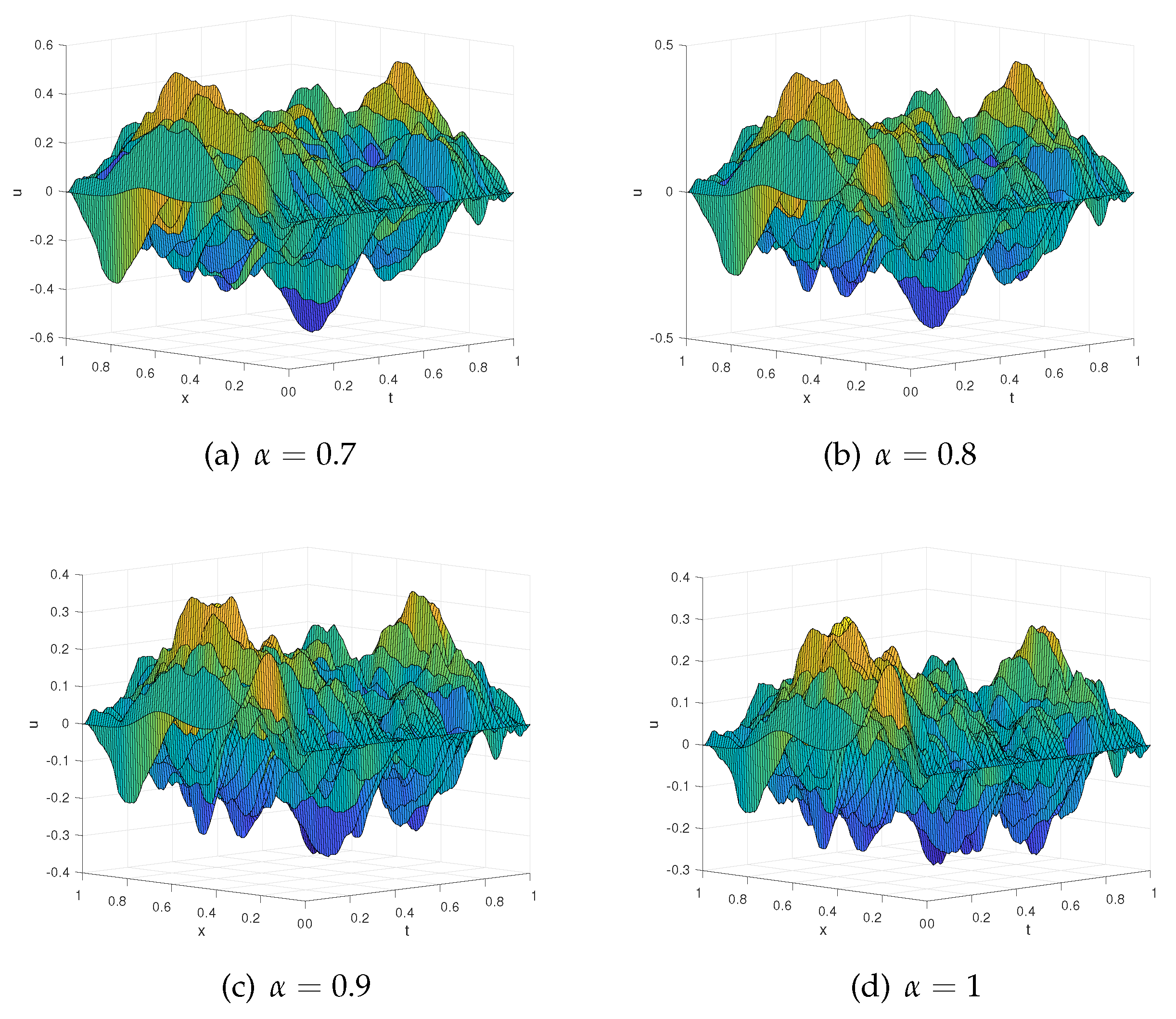
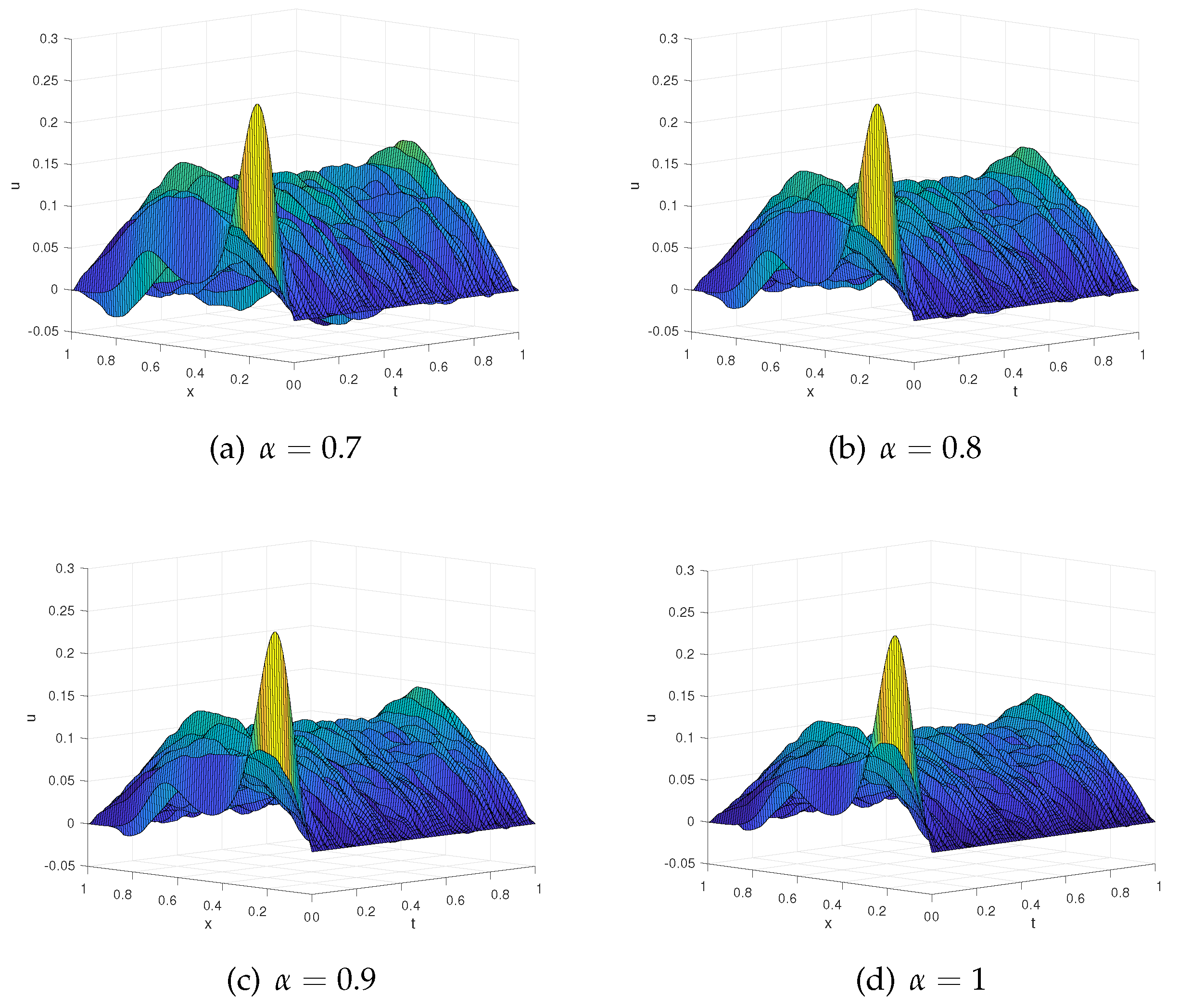
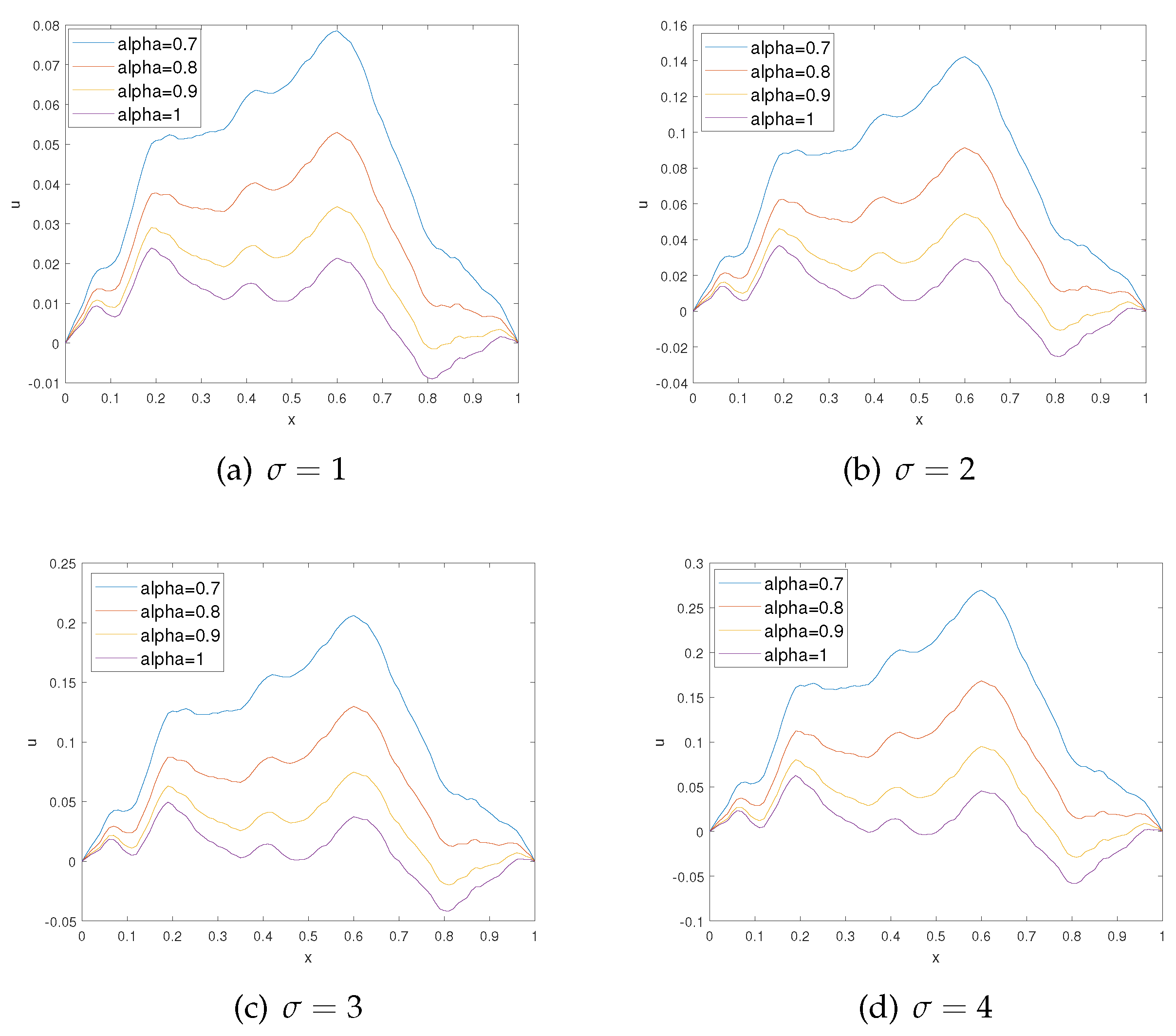
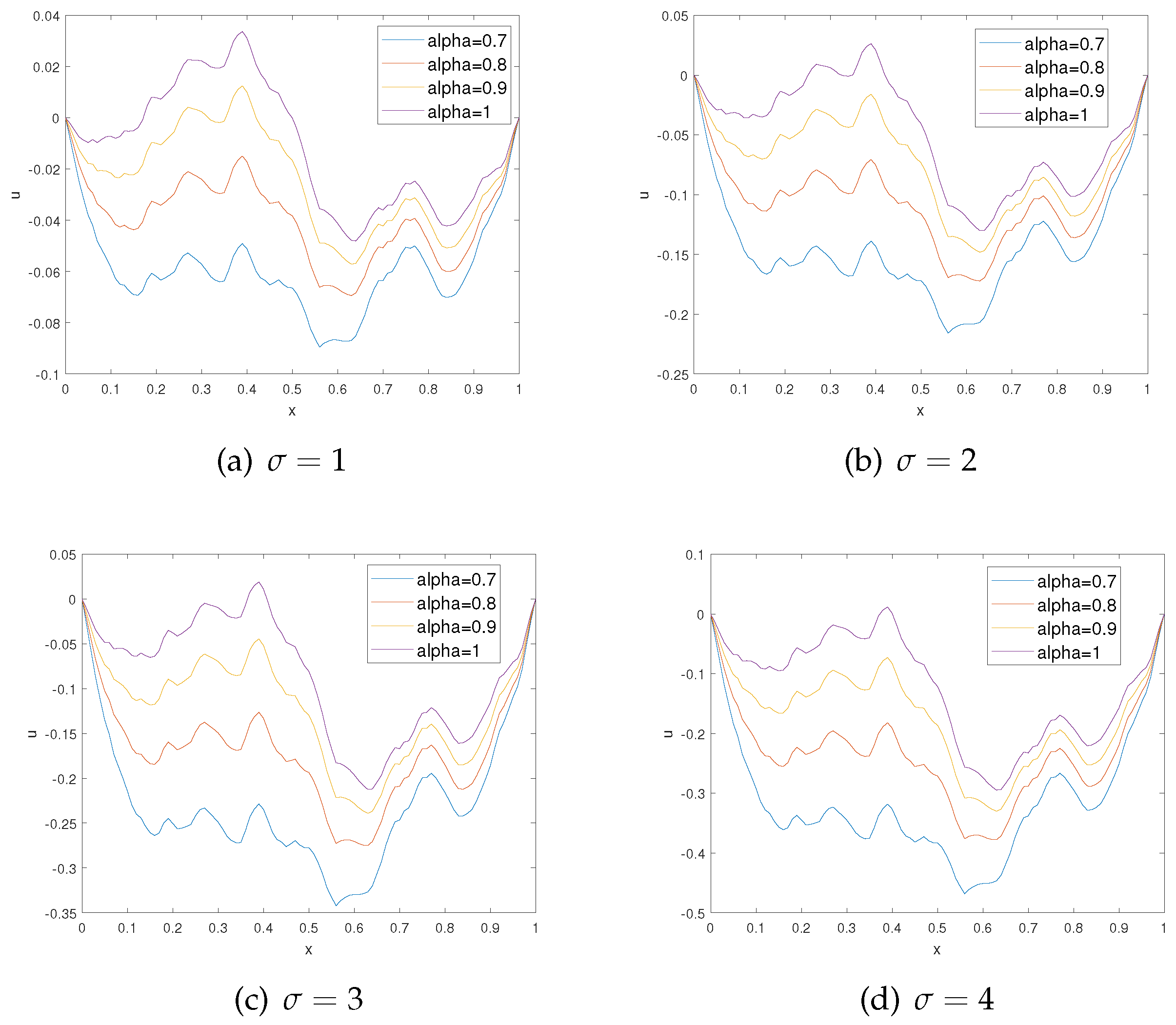
Example 1.
Consider the following SGFDE:
with the initial and boundary conditions: , , and , where , and stand for the GTFD of u(x, t) given by Equation (6). Let , , then Equation (20) reduces to a classical FDE.
Figure 1 and Figure 2 show the numerical solutions for different values of and . Figure 3 shows the numerical solutions at and different values of and .
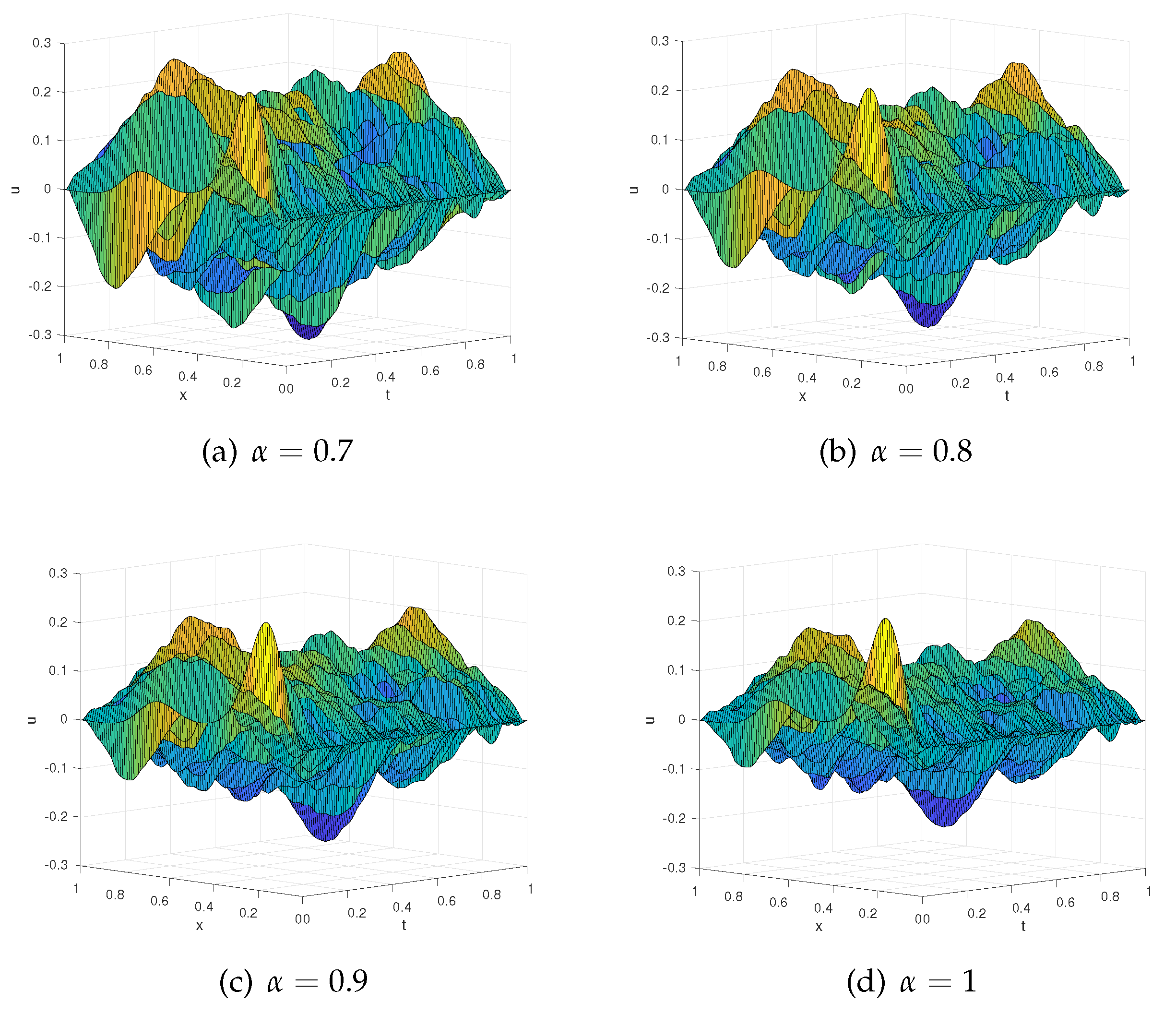
Example 2.
Consider the following SGFDE:
with , and .
- (1)
- , source term , scale function , weight function , and the initial condition as . We observe that the solutions tend to zero eventually, which is because Equation (7) is a diffusion equation with zero-boundary conditions.
- (2)
- , source term , scale function , weight function , and the initial condition as . Comparison of Figure 4 with Figure 6 shows that when the diffusion coefficient ν reduces, the diffusion becomes slow.
- (3)
- , source term , scale function , weight function , and the initial condition as . Comparison of Figure 8 with Figure 4 shows that when the source term is a nonzero constant, which means that the energy will be supplied constantly during diffusion, the diffusion will tend to be a nonzero stationary distribution.
6. Conclusions
This article introduces a model to the GFDEs as SGFDEs including a random term. The finite difference method is also used for finding numerical solution of SGFDEs. Numerical examples with plots of the results are depicted to show the efficiency of the proposed method.
Author Contributions
All authors contributed equally to this work.
Acknowledgments
We thank the referees for their thoughtful comments and suggestions that helped to improve our manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Debrabant, K.; Kværnø, A. B-series analysis of stochastic Runge-Kutta methods that use an iterative scheme to compute their internal stage values. SIAM J. Numer. Anal. 2008, 47, 181–203. [Google Scholar] [CrossRef]
- Kloeden, P.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer: Berlin, Germany, 1999. [Google Scholar]
- Barth, A. A Finite Element Method for Martingale-Stochastic Partial Differential Equations. Commun. Stoch. Anal. 2010, 4, 355–375. [Google Scholar] [CrossRef]
- Mohammed, A.S. Mean Square Convergent Three and Five Points Finite Difference Scheme for Stochastic Parabolic Partial Differential Equations. Electron. J. Math. Anal. Appl. 2014, 2, 164–171. [Google Scholar]
- Soong, T.T. Random Differential Equations in Science and Engineering; Academic Press: New York, NY, USA, 1973. [Google Scholar]
- Alabert, A.; Gyongy, I. On Numerical Approximation of Stochastic Burgers’ Equation. In From Stochastic Calculus to Mathematical Finance; Kabanov, Y., Liptser, R., Stoyanov, J., Eds.; Springer: Berlin, Germany, 2006; pp. 1–15. [Google Scholar]
- Davie, A.M.; Gaines, J.G. Convergence of Numerical Schemes for the Solution of Parabolic Stochastic Partial Differential Equations. Math. Comput. 2011, 70, 121–134. [Google Scholar] [CrossRef]
- Printems, J. On the Discretization in Time of Parabolic Stochastic Partial Differential Equations. ESAIM Math. Model. Numer. Anal. 2001, 35, 1055–1078. [Google Scholar] [CrossRef]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Springer: Berlin, Germany, 2010. [Google Scholar]
- Spanier, J.; Oldham, K.B. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Ross, B. The development of fractional calculus 1695-1900. Hist. Math. 1977, 4, 75–89. [Google Scholar] [CrossRef]
- Rossikhin, Y.A. Reflections on two parallel ways in the progress of fractional calculus in mechanics of solids. Appl. Mech. Rev. 2010, 63, 010701. [Google Scholar] [CrossRef]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Seybold, H.J.; Hilfer, R. Numerical results for the generalized Mittag-Leffler functions. Fract. Calc. Appl. Anal. 2005, 8, 127–139. [Google Scholar]
- Odibat, Z.M. Analytic study on linear systems of fractional differential equations. Comput. Math. Appl. 2010, 59, 1171–1183. [Google Scholar] [CrossRef]
- Odibat, Z.; Momani, S.; Erturk, V.S. Generalized differential transform method: Application to differential equations of fractional order. Appl. Math. Comput. 2008, 197, 467–477. [Google Scholar] [CrossRef]
- Xu, Y.; He, Z.; Agrawal, O. Numerical and analytical solutions of new generalized fractional diffusion equation. Comput. Math. Appl. 2013, 66, 2019–2029. [Google Scholar] [CrossRef]
- Agrawal, O. Some generalized fractional calculus operators and their applications in integral equations. Fract. Calc. Anal. Appl. 2012, 15, 700–711. [Google Scholar] [CrossRef] [Green Version]
- Kilbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- El-Tawil, M.A.; Sohaly, M.A. Mean square convergent three points finite difference scheme for random partial differential equations. J. Egypt. Math. Soc. 2012, 20, 188–204. [Google Scholar] [CrossRef]
- Ekström, S.-E.; Furci, I.; Garoni, C.; Manni, C.; Serra-Capizzano, S.; Speleers, H. Are the eigenvalues of the B-spline IgA approximation of −Δu = λu known in almost closed form? Numer. Linear Algebra Appl. 2018. [Google Scholar] [CrossRef]
- Serra-Capizzano, S. On the extreme spectral properties of symmetric Toeplitz matrices generated by L1 functions with several global minima/maxima. BIT 1996, 36, 135–142. [Google Scholar] [CrossRef]
- Smith, G.D. Numerical Solution of Partial Differential Equations: Finite Difference Methods; Oxford University Press: Oxford, UK, 1985. [Google Scholar]
Figure 1.
The approximation solutions of Example 1 with .

Figure 2.
The approximation solutions of Example 1 with .

Figure 3.
The approximation solutions of Example 1 with .

Figure 4.
The approximation solutions of Example 2 (case (1)) with .

Figure 5.
The approximation solutions of Example 2 (case (1)) with .

Figure 6.
The approximation solutions of Example 2 (case (2)) with .

Figure 7.
The approximation solutions of Example 2 (case (2)) with .

Figure 8.
The approximation solutions of Example 2 (case (3)) with .

Figure 9.
The approximation solutions of Example 2 (case (3)) with .

Figure 10.
The approximation solutions of Example 2 (case (1)) with .

Figure 11.
The approximation solutions of Example 2 (case (2)) with .

Figure 12.
The approximation solutions of Example 2 (case (3)) with .

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sepahvandzadeh, A.; Ghazanfari, B.; Asadian, N. Numerical Solution of Stochastic Generalized Fractional Diffusion Equation by Finite Difference Method. Math. Comput. Appl. 2018, 23, 53. https://doi.org/10.3390/mca23040053
AMA Style
Sepahvandzadeh A, Ghazanfari B, Asadian N. Numerical Solution of Stochastic Generalized Fractional Diffusion Equation by Finite Difference Method. Mathematical and Computational Applications. 2018; 23(4):53. https://doi.org/10.3390/mca23040053
Chicago/Turabian StyleSepahvandzadeh, Amaneh, Bahman Ghazanfari, and Nader Asadian. 2018. "Numerical Solution of Stochastic Generalized Fractional Diffusion Equation by Finite Difference Method" Mathematical and Computational Applications 23, no. 4: 53. https://doi.org/10.3390/mca23040053