

A Modified Reduced-Order Generalized Integrator–Frequency-Locked Loop-Based Sensorless Vector Control Scheme Including the Maximum Power Point Tracking Algorithm for Grid-Connected Squirrel-Cage Induction Generator Wind Turbine Systems

Abstract
:1. Introduction
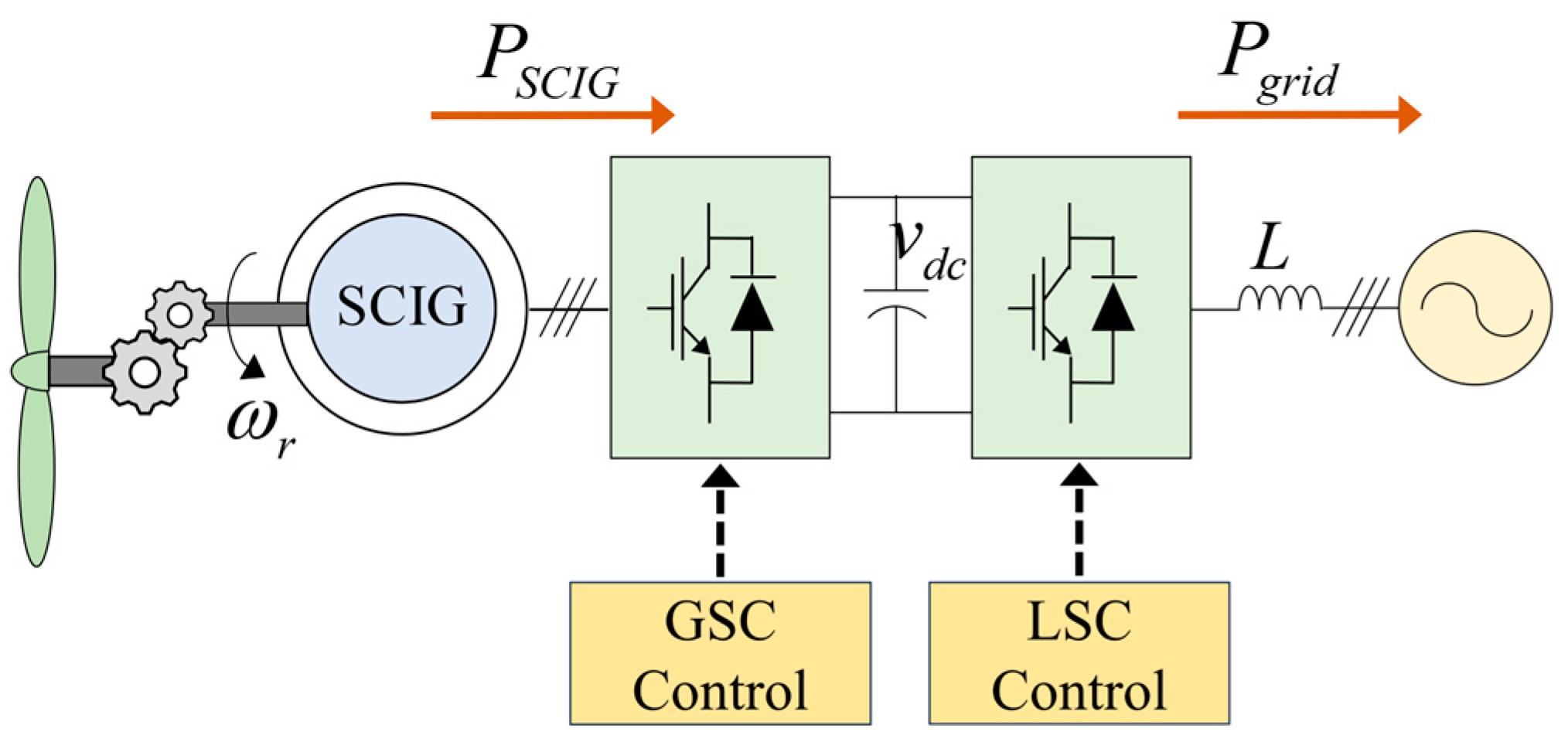
2. SCIG-Based Wind Energy Conversion Systems
2.1. Modeling of SCIG
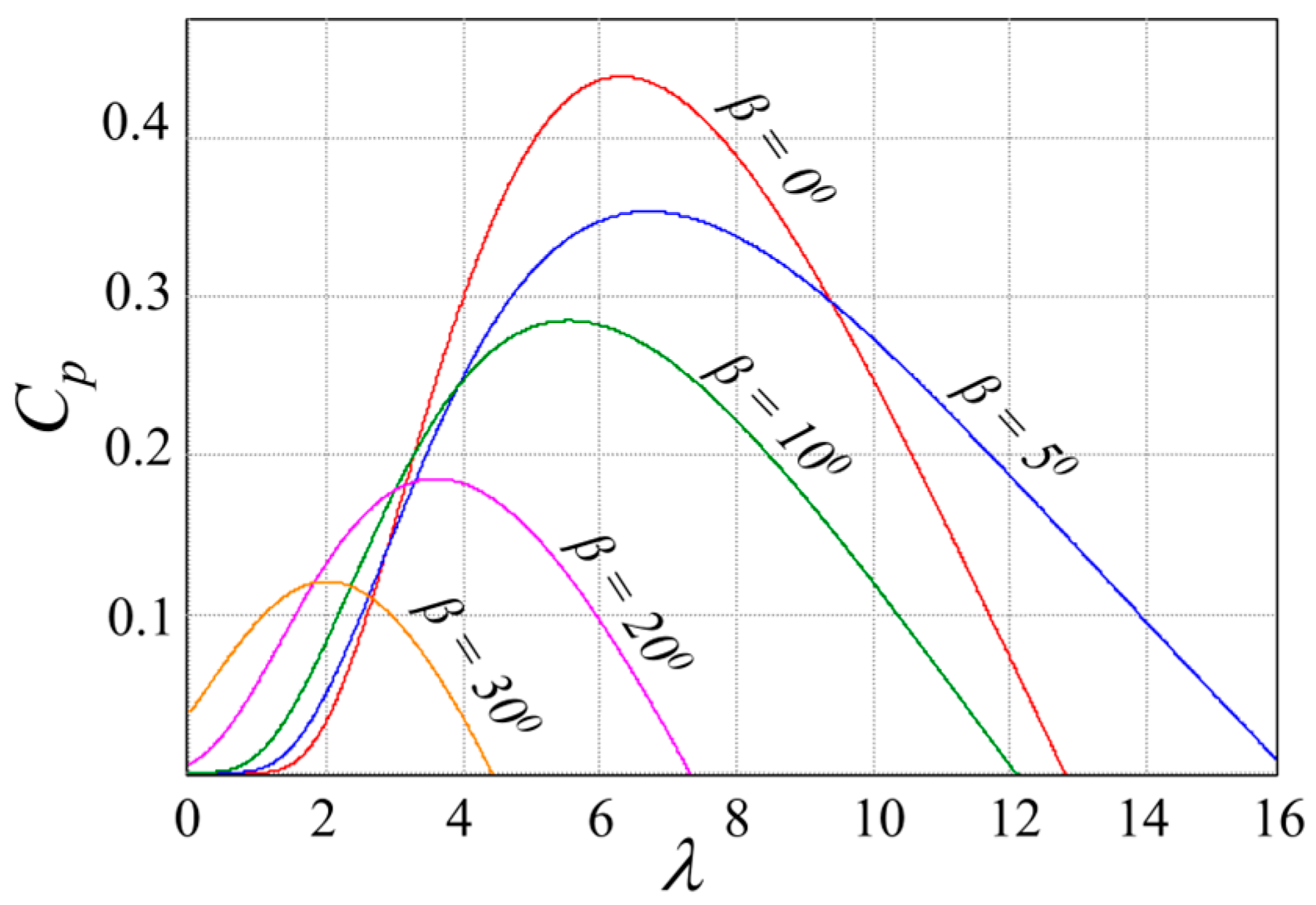
2.2. Modeling of Wind Turbines
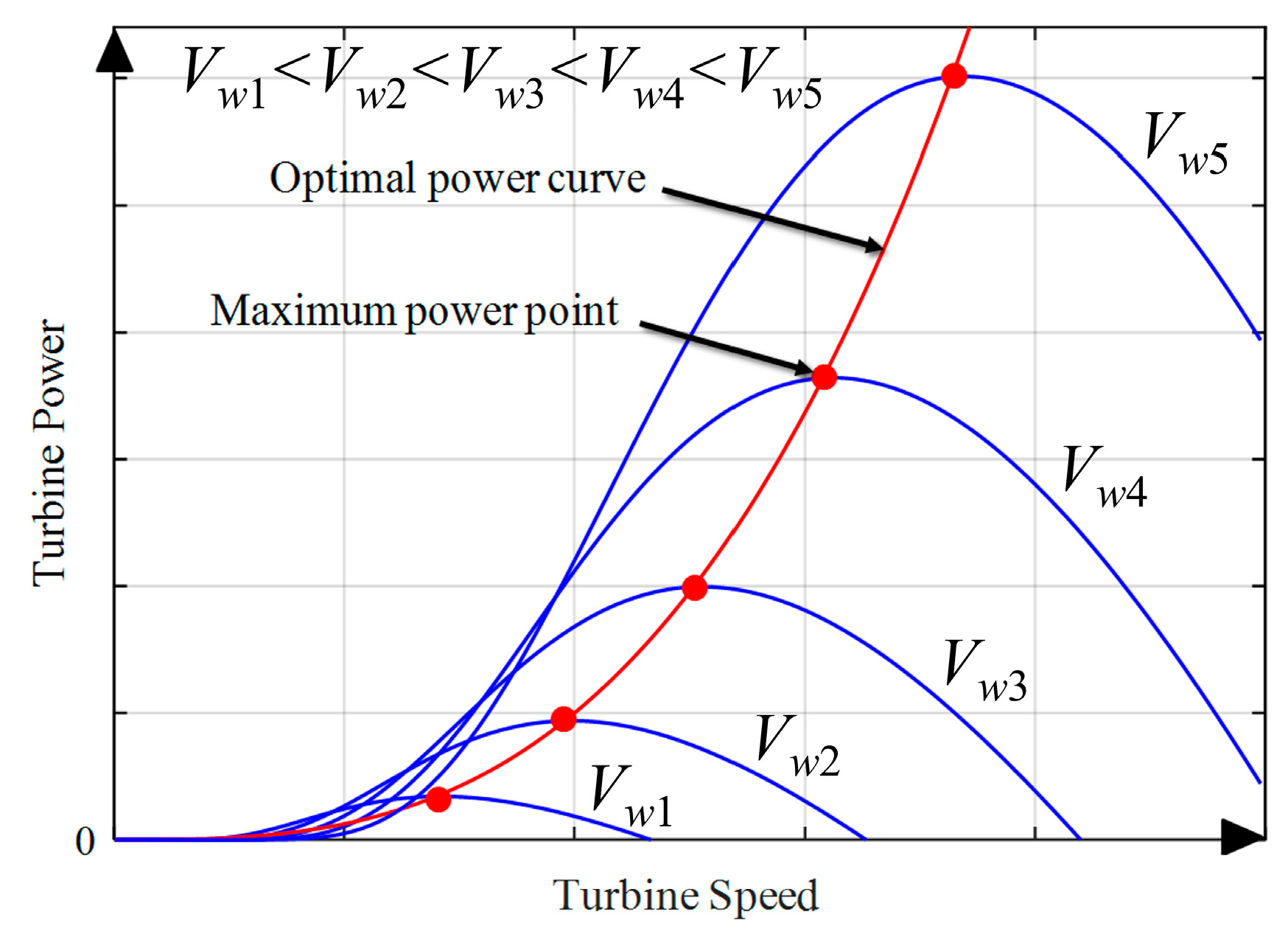
2.3. MPPT Algorithm for Wind Turbine Systems
2.4. Control of SCIG-Based Wind Energy Conversion Systems
3. Proposed Sensorless Control Method
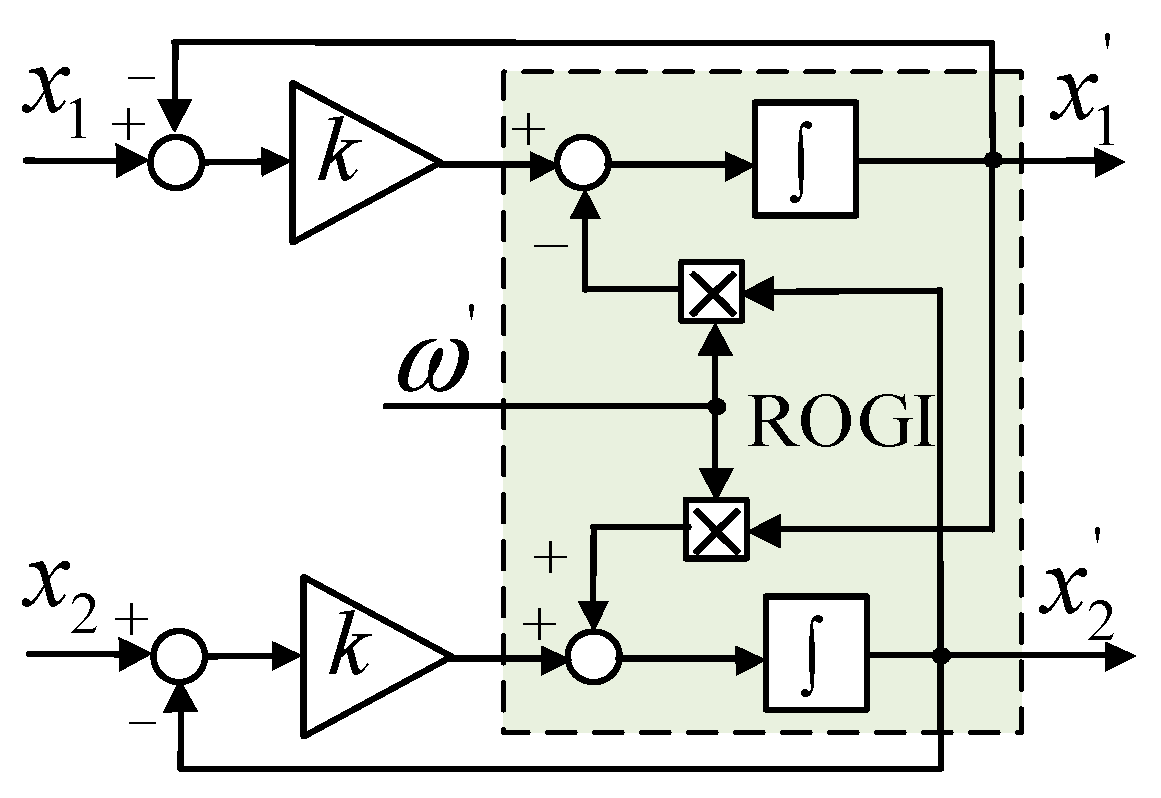
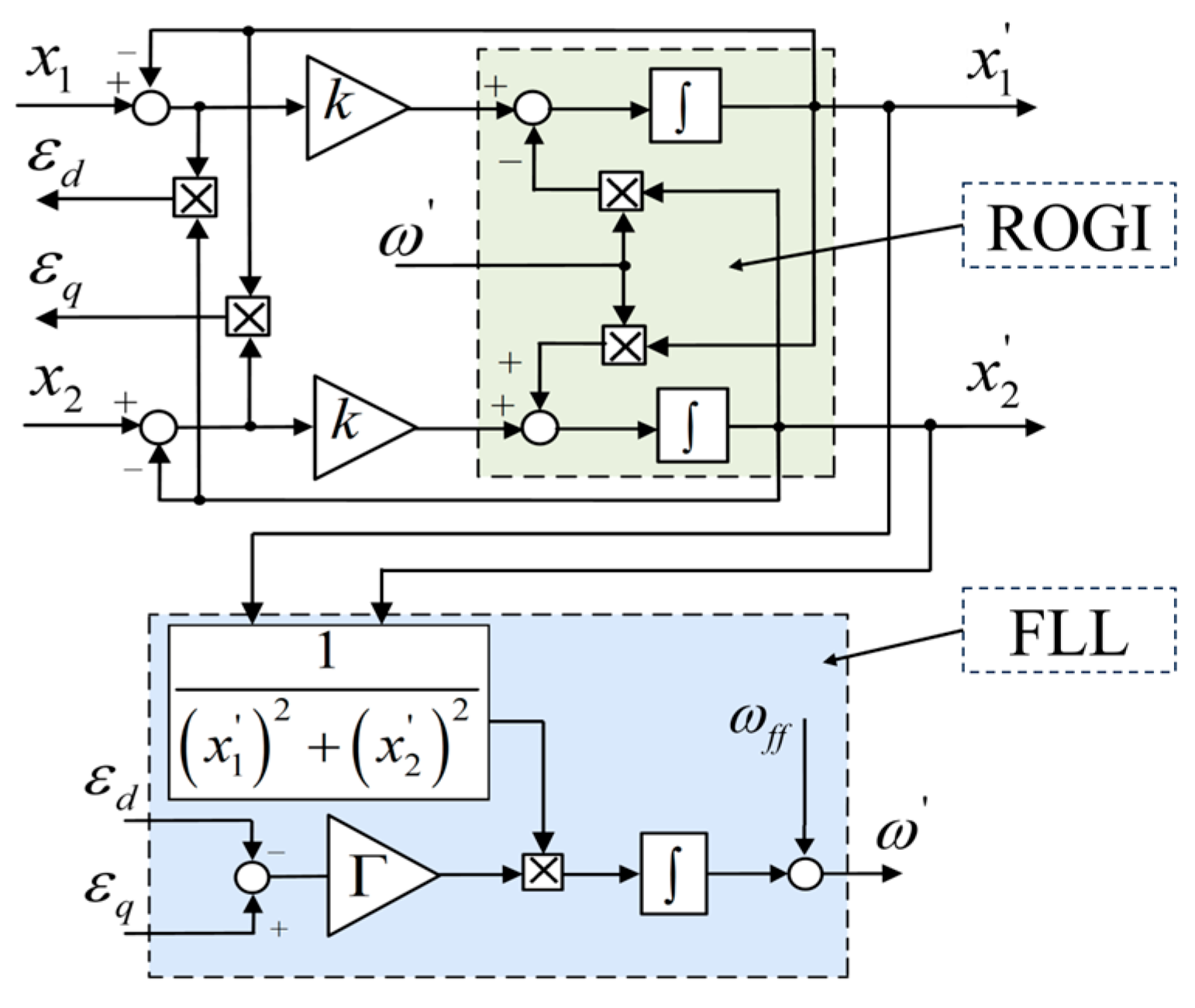
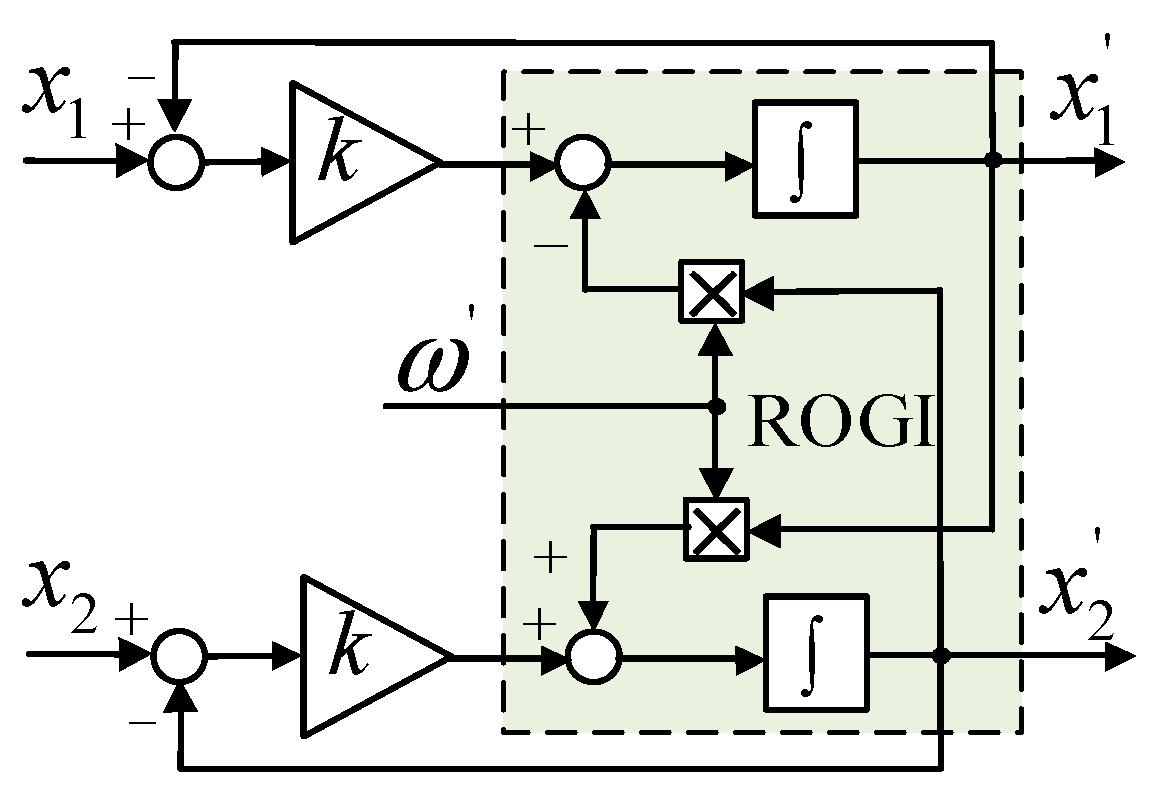
3.1. Standard ROGI Structure
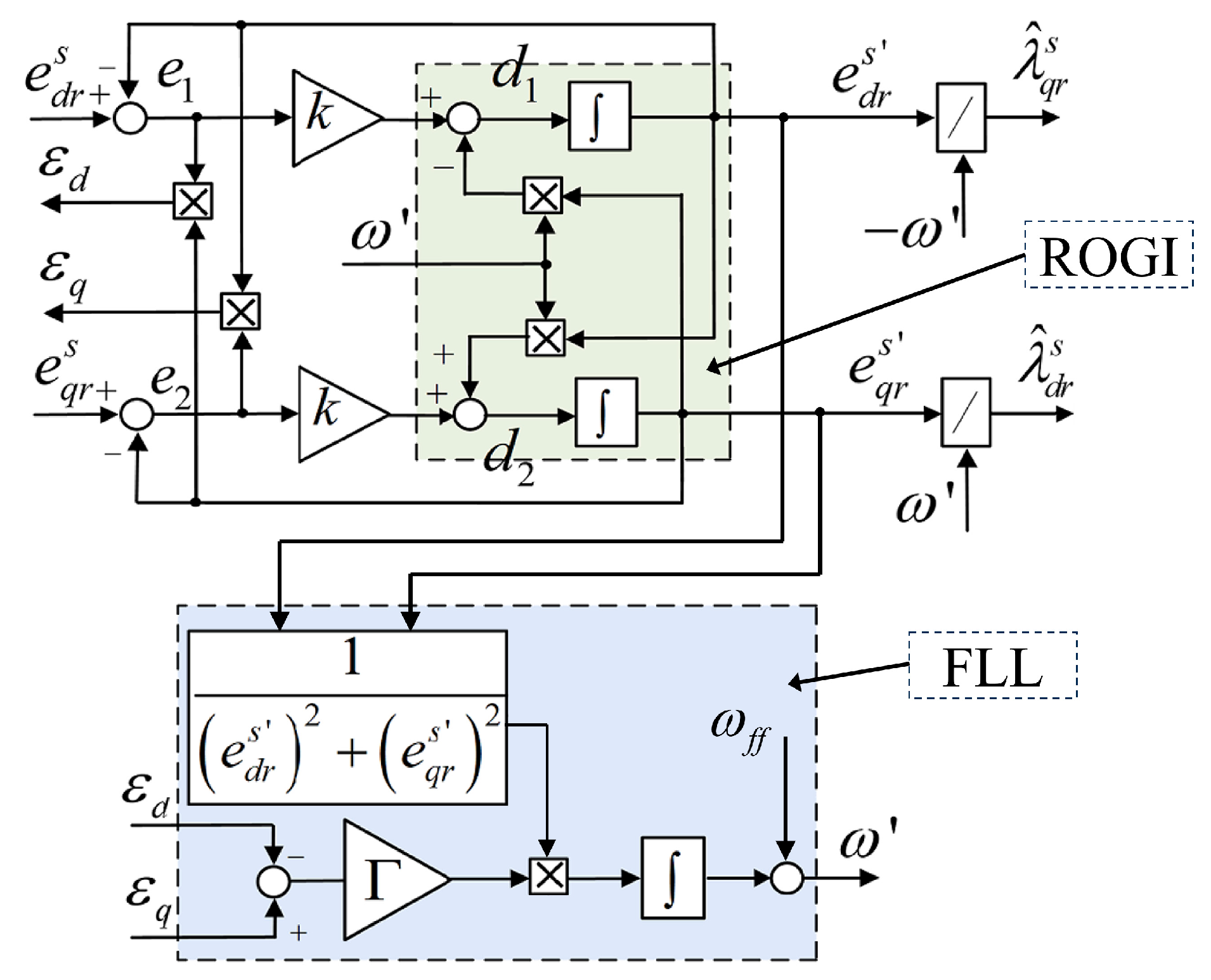
3.2. ROGI-FLL for Rotor Flux Linkage Estimation
3.3. Modified ROGI-FLL Including DC Offset Compensators for Rotor Flux Linkage Estimation
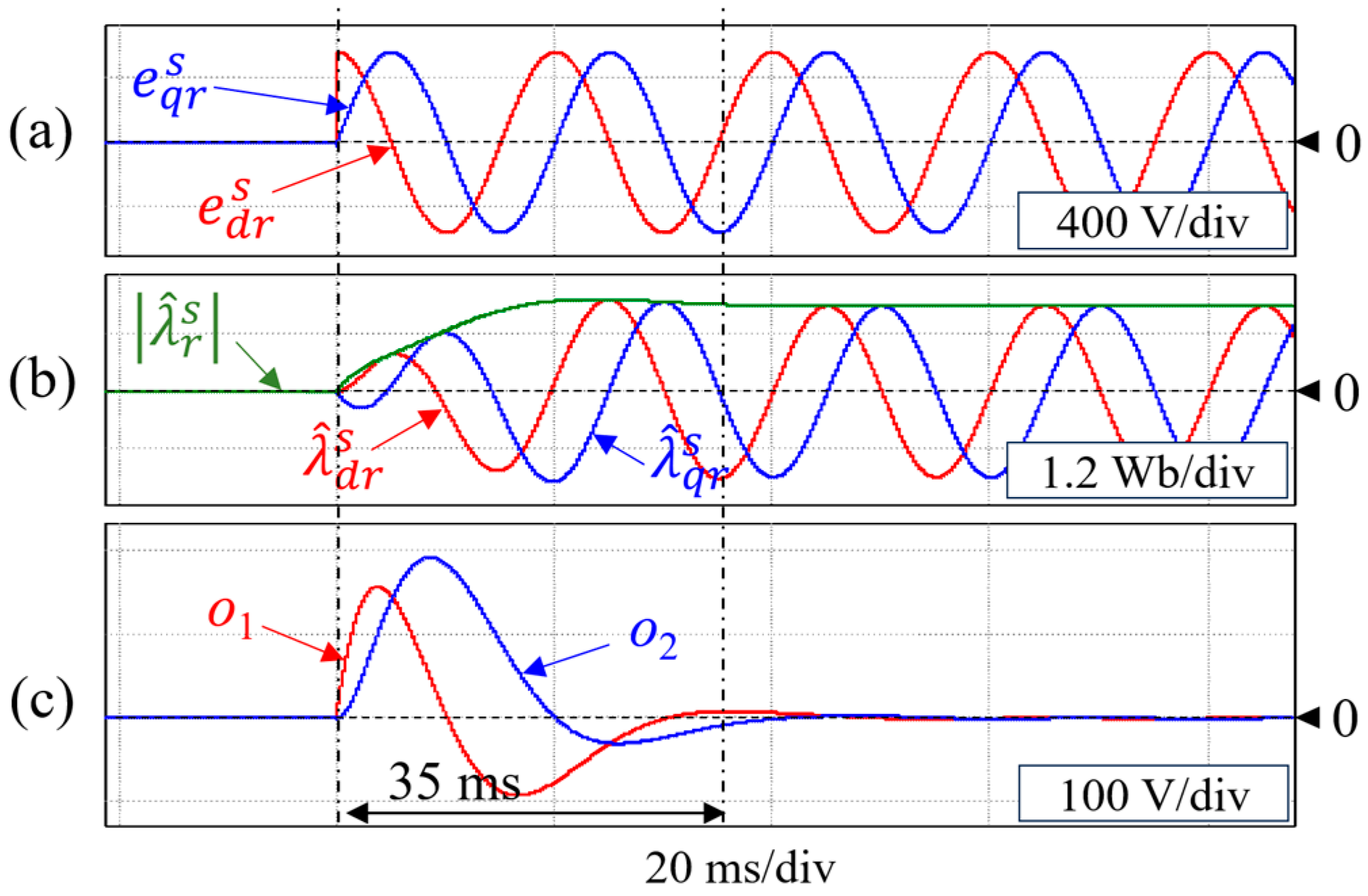
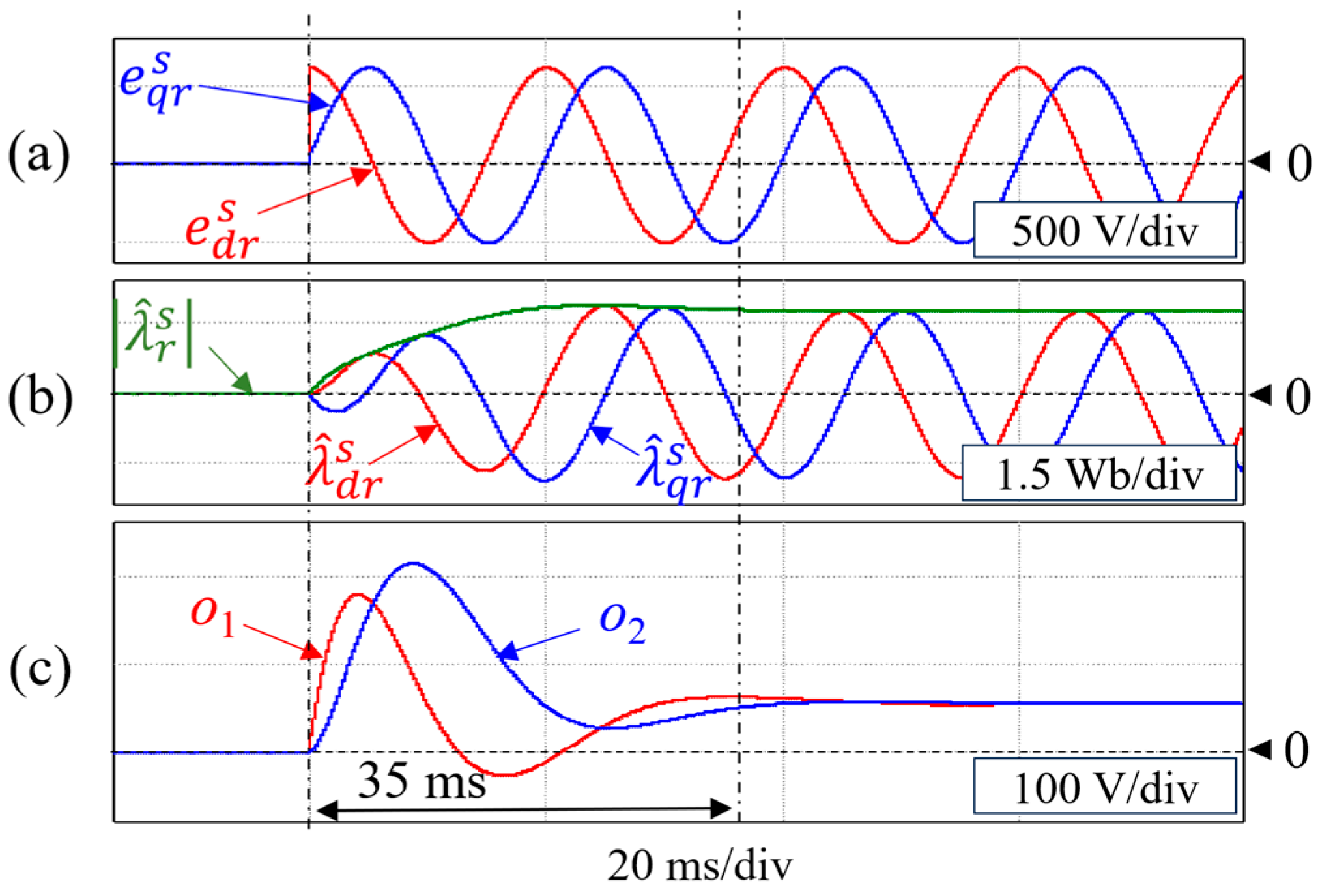
3.4. Dynamic Response Analysis of Proposed Rotor Flux Observer
3.4.1. Influences of k and kd on Rotor Flux Estimation
3.4.2. Influence of Г on Rotor Flux Estimation
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Renewables 2020 Global Status Report. 2020. Available online: https://www.ren21.net/wp-content/uploads/2019/05/gsr_2020_full_report_en.pdf (accessed on 4 March 2024).
- Maktabi, M.; Rusu, E. A review of perspectives on developing floating wind farms. Inventions 2024, 9, 24. [Google Scholar] [CrossRef]
- Luo, J.; Bu, S.; Zhu, J. A Novel PMU-based adaptive coordination strategy to mitigate modal resonance between full converter-based wind generation and grids. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 7173–7182. [Google Scholar] [CrossRef]
- Beik, O.; Al-Adsani, A.S. A wind turbine generator design and optimization for DC collector grids. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 484–493. [Google Scholar] [CrossRef]
- Song, G.; Cao, B.; Chang, L. Advanced soft stall control for protection of small-scale wind generation systems. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 273–284. [Google Scholar] [CrossRef]
- Bashetty, S.; Ozcelik, S. Design and stability analysis of an offshore floating multi-wind turbine platform. Inventions 2022, 7, 58. [Google Scholar] [CrossRef]
- Aissou, R.; Rekioua, T.; Rekioua, D.; Tounzi, A. Robust nonlinear predictive control of permanent magnet synchronous generator turbine using Dspace hardware. Int. J. Hydrogen Energy 2016, 41, 21047–21056. [Google Scholar] [CrossRef]
- Telsnig, T. Wind Energy Technology Development Report 2020-EUR 30503 EN; Publications Office of the European Union: Luxembourg, 2020; ISBN 978-92-76-27273-1. [Google Scholar]
- Thoroughly Tested, Utterly Reliable. Available online: https://pdf.archiexpo.com/pdf/siemens-gamesa/swt-36-120/88089-134487.html (accessed on 4 March 2024).
- Yaramasu, V.; Wu, B.; Sen, P.; Kouro, S.; Narimani, M. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. of the IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Sul, S.-K. Control of Electric Machine Drive Systems; John Willey & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Caruana, C.; Asher, G.M.; Sumner, M. Performance of HF signal injection techniques for zero-low-frequency vector control of induction machines under sensorless conditions. IEEE Trans. Ind. Electron. 2006, 53, 225–238. [Google Scholar] [CrossRef]
- Yoon, Y.-D.; Sul, S.-K. Sensorless control for induction machines based on square-wave voltage injection. IEEE Trans. Power Electron. 2014, 29, 3637–3645. [Google Scholar] [CrossRef]
- Holtz, J.; Quan, J. Drift- and parameter-compensated flux estimator for persistent zero-stator-frequency operation of sensorless-controlled induction motors. IEEE Trans. Ind. Appl. 2003, 39, 1052–1060. [Google Scholar] [CrossRef]
- Das, S.; Kumar, R.; Pal, A. MRAS-based speed estimation of induction motor drive utilizing machines’ d- and q-circuit impedances. IEEE Trans. Ind. Electron. 2019, 66, 4286–4295. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Harnefors, L.; Luomi, J. Reduced-order flux observers with stator-resistance adaptation for speed-sensorless induction motor drives. IEEE Trans. Power Electron. 2010, 25, 1173–1183. [Google Scholar] [CrossRef]
- Zaky, M.S.; Metwaly, M.K. Sensorless torque/speed control of induction motor drives at zero and low frequencies with stator and rotor resistance estimations. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1416–1429. [Google Scholar] [CrossRef]
- Alonge, F.; Cangemi, T.; D’Ippolito, F.; Fagiolini, A.; Sferlazza, A. Convergence analysis of extended Kalman filter for sensorless control of induction motor. IEEE Trans. Ind. Electron. 2015, 62, 2341–2352. [Google Scholar] [CrossRef]
- Zhang, X. Sensorless induction motor drive using indirect vector controller and sliding-mode observer for electric vehicles. IEEE Trans. Veh. Technol. 2013, 62, 3010–3018. [Google Scholar] [CrossRef]
- Hu, J.; Wu, B. New integration algorithms for estimating motor flux over a wide speed range. IEEE Trans. Power Electron. 1998, 13, 969–977. [Google Scholar]
- Comanescu, M.; Xu, L. An improved flux observer based on PLL frequency estimator for sensorless vector control of induction motors. IEEE Trans. Ind. Electron. 2006, 53, 50–56. [Google Scholar] [CrossRef]
- Bose, B.K.; Patel, N.R. A programmable cascaded low-pass filter-based flux synthesis for a stator flux-oriented vector-controlled induction motor drive. IEEE Trans. Ind. Electron. 1997, 44, 140–143. [Google Scholar] [CrossRef]
- Shin, M.-H.; Hyun, D.-S.; Cho, S.-B.; Choe, S.-Y. An improved stator flux estimation for speed sensorless stator flux orientation control of induction motors. IEEE Trans. Power Electron. 2000, 15, 312–318. [Google Scholar] [CrossRef]
- Hackl, C.M.; Landerer, M. Modified second-order generalized integrators with modified frequency locked loop for fast harmonics estimation of distorted single-phase signals. IEEE Trans. Power Electron. 2020, 35, 3298–3309. [Google Scholar] [CrossRef]
- Matas, J.; Castilla, M.; Miret, J.; De Vicuña, L.G.; Guzman, R. An adaptive prefiltering method to improve the speed/accuracy tradeoff of voltage sequence detection methods under adverse grid conditions. IEEE Trans. Ind. Electron. 2014, 61, 2139–2151. [Google Scholar] [CrossRef]
- Rodríguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant frequency-locked loop for grid synchronization of power converters under distorted grid conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef]
- Rodríguez, P.; Luna, A.; Muñoz-Aguilar, R.S.; Etxeberria-Otadui, I.; Teodorescu, R.; Blaabjerg, F. A stationary reference frame grid synchronization system for three-phase grid-connected power converters under adverse grid conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Sreejith, R.; Singh, B. Sensorless predictive current control of PMSM EV drive using DSOGI-FLL based sliding mode observer. IEEE Trans. Ind. Electron. 2021, 68, 5537–5547. [Google Scholar] [CrossRef]
- Kashif, M.; Murshid, S.; Singh, B. Solar PV array fed self-sensing control of PMSM drive with robust adaptive hybrid SOGI based flux observer for water pumping. IEEE Trans. Ind. Electron. 2021, 68, 6962–6972. [Google Scholar] [CrossRef]
- Dao, N.D.; Lee, D.-C.; Lee, S.-M. A simple and robust sensorless control based on stator current vector for PMSG wind power systems. IEEE Access 2018, 7, 8070–8080. [Google Scholar] [CrossRef]
- Xin, Z.; Zhao, E.; Blaabjerg, F.; Zhang, L.; Loh, P.C. An improved flux observer for field-oriented control of induction motors based on dual second-order generalized integrator frequency-locked loop. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 513–525. [Google Scholar] [CrossRef]
- Zhao, R.; Xin, Z.; Loh, P.C.; Blaabjerg, F. A novel flux estimator based on multiple second-order generalized integrators and frequency-locked loop for induction motor drives. IEEE Trans. Power Electron. 2017, 32, 6286–6296. [Google Scholar] [CrossRef]
- Xu, W.; Jiang, Y.; Mu, C.; Blaabjerg, F. Improved nonlinear flux observer-based second-order SOIFO for PMSM sensorless control. IEEE Trans. Power Electron. 2019, 34, 565–579. [Google Scholar] [CrossRef]
- Harnefors, L.; Hinkkanen, M. Complete stability of reduced-order and full-order observers for sensorless IM drives. IEEE Trans. Ind. Electron. 2008, 55, 1319–1329. [Google Scholar] [CrossRef]
- Harnefors, L.; Ottersten, R. Regeneration-mode stabilization of the ‘statically compensated voltage model. IEEE Trans. Ind. Electron. 2007, 54, 818–824. [Google Scholar] [CrossRef]
- Xin, Z.; Zhao, R.; Mattavelli, P.; Loh, P.C.; Blaabjerg, F. Re-investigation of generalized integrator based filters from a first-order system perspective. IEEE Access 2016, 4, 7131–7144. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C. Is using a complex control gain in three-phase FLLs reasonable? IEEE Trans. Ind. Electron. 2020, 67, 2480–2484. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Khajehoddin, S.A.; Jain, P.K.; Bakhshai, A.; Mojiri, M. Addressing DC component in PLL and notch filter algorithms. IEEE Trans. Power Electron. 2012, 27, 78–86. [Google Scholar] [CrossRef]
- Wang, A.J.; Ma, B.Y.; Meng, C.X. A frequency-locked loop technology of three-phase grid-connected inverter based on improved reduced-order generalized integrator. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications, Auckland, New Zealand, 15–17 June 2015; pp. 730–735. [Google Scholar]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.; Abusorrah, A.M.; Al-Turki, Y.A. A study on three-phase FLLs. IEEE Trans. Power Electron. 2019, 34, 213–224. [Google Scholar] [CrossRef]
- Vazquez, S.; Sanchez, J.A.; Reyes, M.R.; Leon, J.I.; Carrasco, J.M. Adaptive vectorial filter for grid synchronization of power converters under unbalanced and/or distorted grid conditions. IEEE Trans. Ind. Electron. 2014, 61, 1355–1367. [Google Scholar] [CrossRef]
- Busada, C.A.; Jorge, S.G.; Leon, A.E.; Solsona, J.A. Current controller based on reduced order generalized integrators for distributed generation systems. IEEE Trans. Ind. Electron. 2012, 59, 2898–2909. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Lee, D.-C. Sensorless control of variable-speed SCIG wind energy conversion systems based on rotor flux estimation using ROGI-FLL. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7786–7796. [Google Scholar] [CrossRef]
- Rekioua, D.; Rekioua, T.; Idjdarene, K.; Tounzi, A. An approach for the modeling of an autonomous induction generator taking into account the saturation effect. Int. J. Emerg. Electr. Power Syst. 2005, 4. [Google Scholar] [CrossRef]
- Yin, M.; Li, G.; Zhou, M.; Zhao, C. Modelling of the wind turbine with permanent magnet synchronous generator for integration. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Thongam, J.S.; Ouhrouche, M. MPPT control methods in wind energy conversion systems. In Fundamental and Advanced Topics in Wind Power; Carriveau, R., Ed.; InTech: Houston, TX, USA, 2011; pp. 339–360. [Google Scholar]
- Apata, O.; Oyedokun, D. An overview of control techniques for wind turbine systems. Sci. Afr. 2020, 10, e00566. [Google Scholar] [CrossRef]
- Kumar, D.; Chatterjee, K. A review of conventional and advanced MPPT algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Macan, M.; Bahun, I.; Jakopovíc, Ž. Output DC voltage elimination in PWM converters for railway applications. In Proceedings of the 17th International Conference on Electrical Drives and Power Electronics, The High Tatras, Slovakia, 28–30 September 2011; pp. 49–54. [Google Scholar]
- Long, B.; Zhang, M.; Liao, Y.; Huang, L.; Chong, K.T. An overview of DC component generation, detection and suppression for grid-connected converter systems. IEEE Access 2019, 7, 110426–110438. [Google Scholar] [CrossRef]
- Zhang, H.; Eng, J. DC Component Elimination at Output Voltage of PWM Inverters. U.S. Patent 7 830 682 B2, 9 November 2010. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A. Feedback Control of Dynamic Systems, 6th ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2009. [Google Scholar]
- Nguyen, A.T.; Lee, D.-C. Sensorless control of DFIG wind turbine systems based on SOGI and rotor position correction. IEEE Trans. Power Electron. 2021, 36, 5486–5495. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Stator frequency | 50 Hz |
| Rated stator power | 2 MW |
| Rated line–line stator voltage | 690 V |
| Rated stator current | 2000 A |
| Pole pairs | 2 |
| Stator resistance | 1.102 mΩ |
| Magnetizing inductance | 2.1346 mH |
| Stator leakage inductance | 0.0649 mH |
| Rated speed | 1520 rpm |
| Parameters | Values |
|---|---|
| Rated power | 2 MW |
| Blade radius | 45 m |
| Gear ratio | 1:123 |
| Cut-in/Cut-off speed | 4 m/s~25 m/s |
| Rated wind speed | 12 m/s |
| Operating speed range | 675 rpm~1500 rpm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, T.V.; Nguyen, A.T. A Modified Reduced-Order Generalized Integrator–Frequency-Locked Loop-Based Sensorless Vector Control Scheme Including the Maximum Power Point Tracking Algorithm for Grid-Connected Squirrel-Cage Induction Generator Wind Turbine Systems. Inventions 2024, 9, 44. https://doi.org/10.3390/inventions9020044
Pham TV, Nguyen AT. A Modified Reduced-Order Generalized Integrator–Frequency-Locked Loop-Based Sensorless Vector Control Scheme Including the Maximum Power Point Tracking Algorithm for Grid-Connected Squirrel-Cage Induction Generator Wind Turbine Systems. Inventions. 2024; 9(2):44. https://doi.org/10.3390/inventions9020044
Chicago/Turabian StylePham, Tuynh Van, and Anh Tan Nguyen. 2024. "A Modified Reduced-Order Generalized Integrator–Frequency-Locked Loop-Based Sensorless Vector Control Scheme Including the Maximum Power Point Tracking Algorithm for Grid-Connected Squirrel-Cage Induction Generator Wind Turbine Systems" Inventions 9, no. 2: 44. https://doi.org/10.3390/inventions9020044