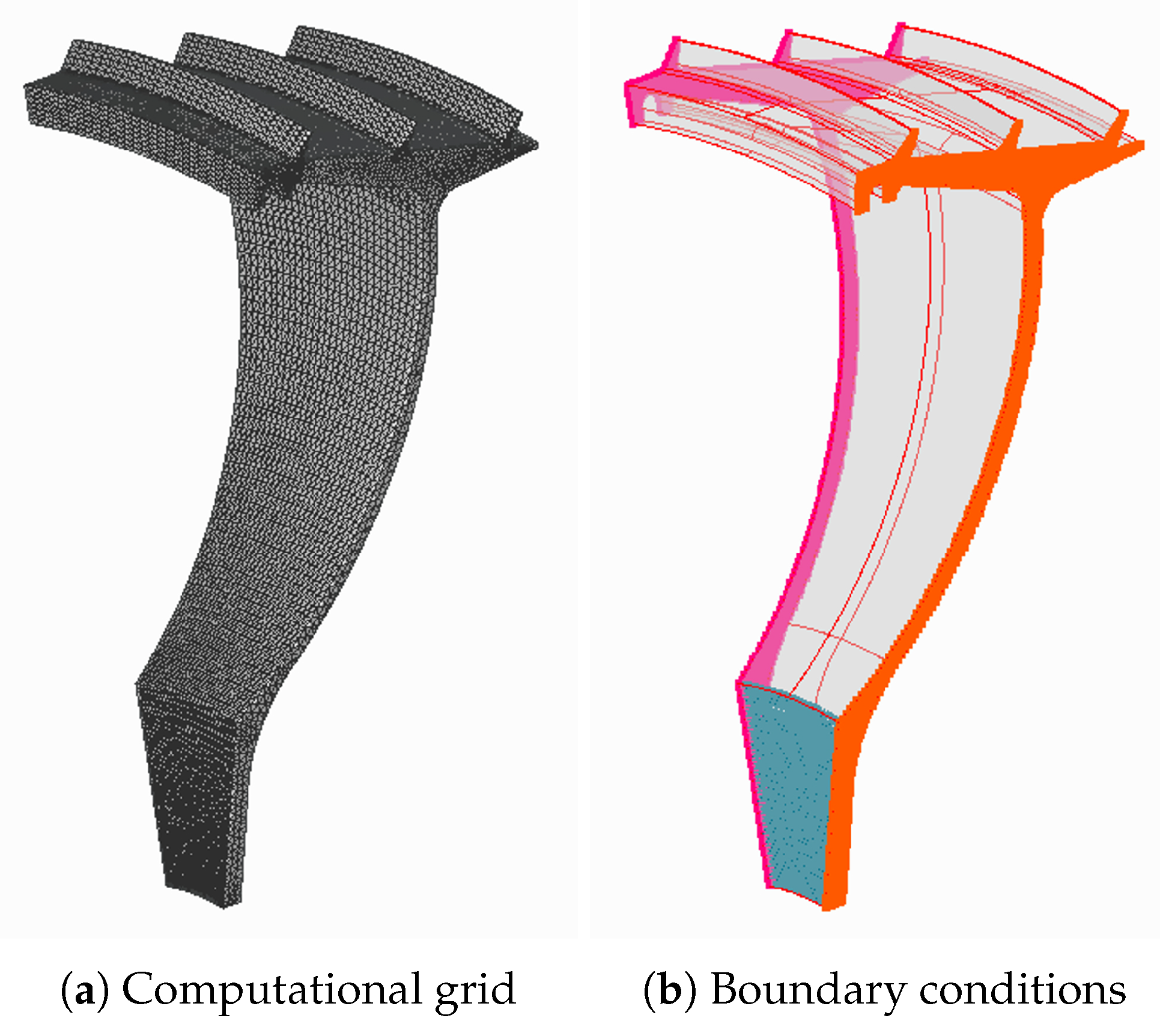
4.1. Structural Analysis
As mentioned in the previous section, the uncoupled methodology requires a modal analysis of the structure to obtain its modal characteristics that will be imposed in the linearised CFD simulation. The calculation of the modal properties considers the static deformation of the seal due to rotational speed and pressure loads through a pre-stress term.
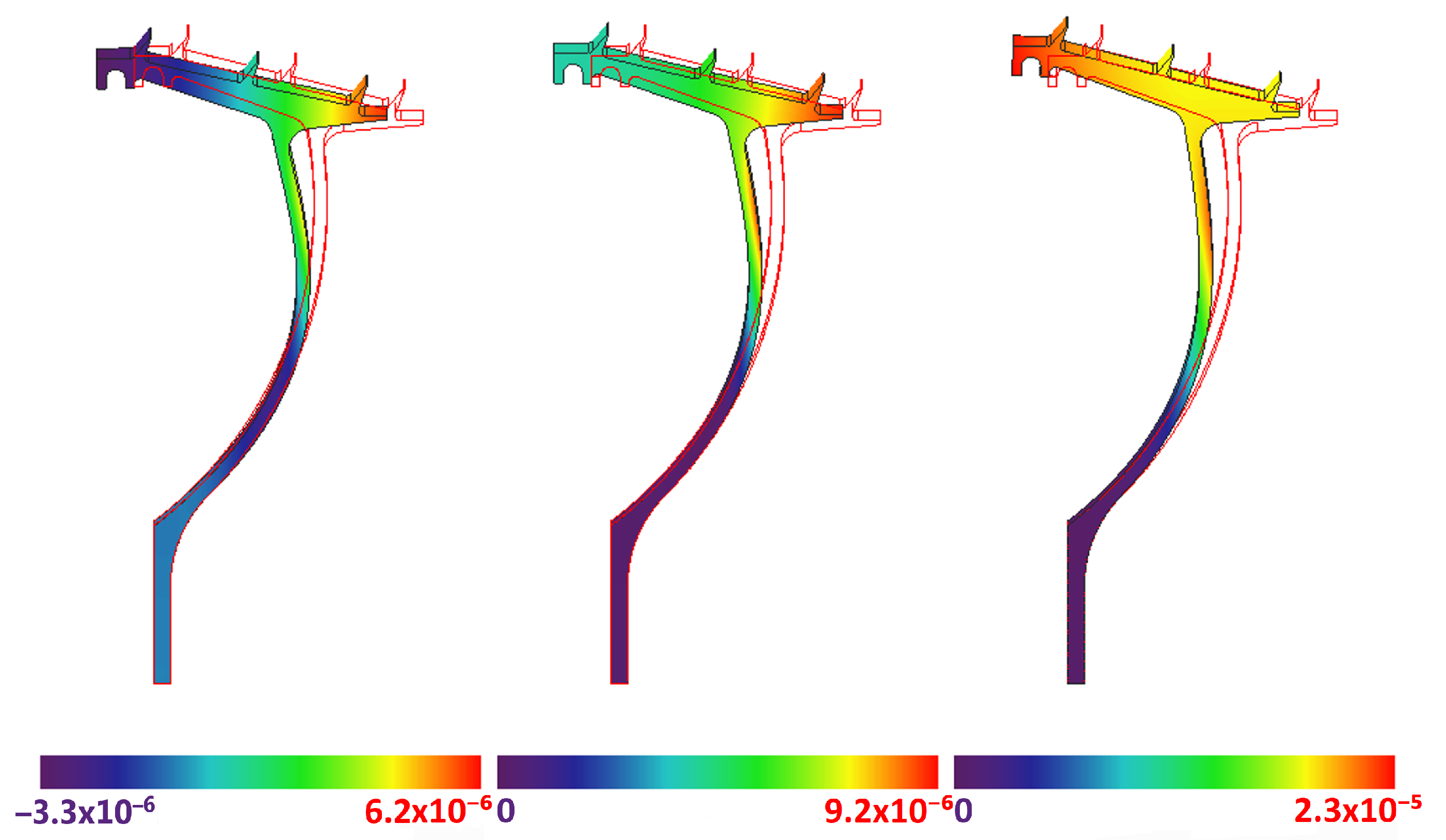
Figure 7 illustrates the static deflection of the baseline seal operating at a different shaft speed. Some interesting conclusions can be drawn. Given the position of the pivot point, pressure loads tend to close the right-most clearance while opening the left-most one (0 rpm case). In contrast, centrifugal forces tend to close all the gaps, given that the effect is stronger in the fins at a higher radial position. The relative strength between both effects at the different shaft speeds produces qualitatively different cases, with the maximum closure moving from the right-most to the left-most fin. For the two-fin seal, the behaviour is simpler as both the pressure loads and centrifugal forces tend to reduce the clearances.
Regarding the calculated modal properties,
Figure 8 plots the modal frequencies of the two specimens along with the acoustic frequencies of the seal cavities, both the forwards and backwards travelling waves. The numeration of the inter-fin cavities follows the flow direction from right (HPS) to left (LPS). Focusing on the vibration frequencies, the two-fin seal exhibits higher frequencies than the baseline configuration, mainly due to its lower mass at the fin head. The other characteristic that should be pointed out is the trend of the curves. As the reader can observe, the behaviour of the frequency against the nodal diameter is very similar to that found in disk modes, which should not be a surprise given the kind of structure we are analysing. It is well known that increasing the nodal diameter number imposes more restrictions to the disk displacements, which in turn produce a stiffening effect in the structure and an increase in the natural frequencies. It has to be mentioned that measured instabilities show discrepancies of 2–3% in frequency when compared with the predicted values, which is considered acceptable.
However, the key information from
Figure 8 is the ratio between vibrational and acoustic frequencies, because this is one of the main parameters that determine the seal stability. At high nodal diameters, the aforementioned stiffening effect rises vibration frequencies above the acoustic ones (NDs 4–5). In contrast, there is an intermediate region where the opposite is true (ND 2).
Figure 9 and
Figure 10 depict the modal shapes for different nodal diameters with the torsion centre overimposed. The position of the torsion centre is of paramount importance when determining the seal stability. In our case, as we are examining the stability of inclined seals, both the radial and axial coordinates of the pivot point should be considered [
8]. We can observe that the torsion centre moves from a position close to the root of the seal to a position close to the joint between the seal head and arm. Consequently, mode shapes evolve from a pure edgewise movement to a torsion mode. According to the axial position of its torsion centre, the baseline geometry is a high-pressure-supported seal (HPS), that is, the torsion centre lies closer to the high-pressure side (right-most side in our case, as depicted in
Figure 1). In contrast, the two-fin seal is a low-pressure-supported seal (LPS). However, the axial or edge-wise modal component is comparatively higher in this second seal (note the radial position of the torsion centre in
Figure 10), making it difficult to foresee whether it will behave as a LPS or HPS seal.
4.2. Steady Flow
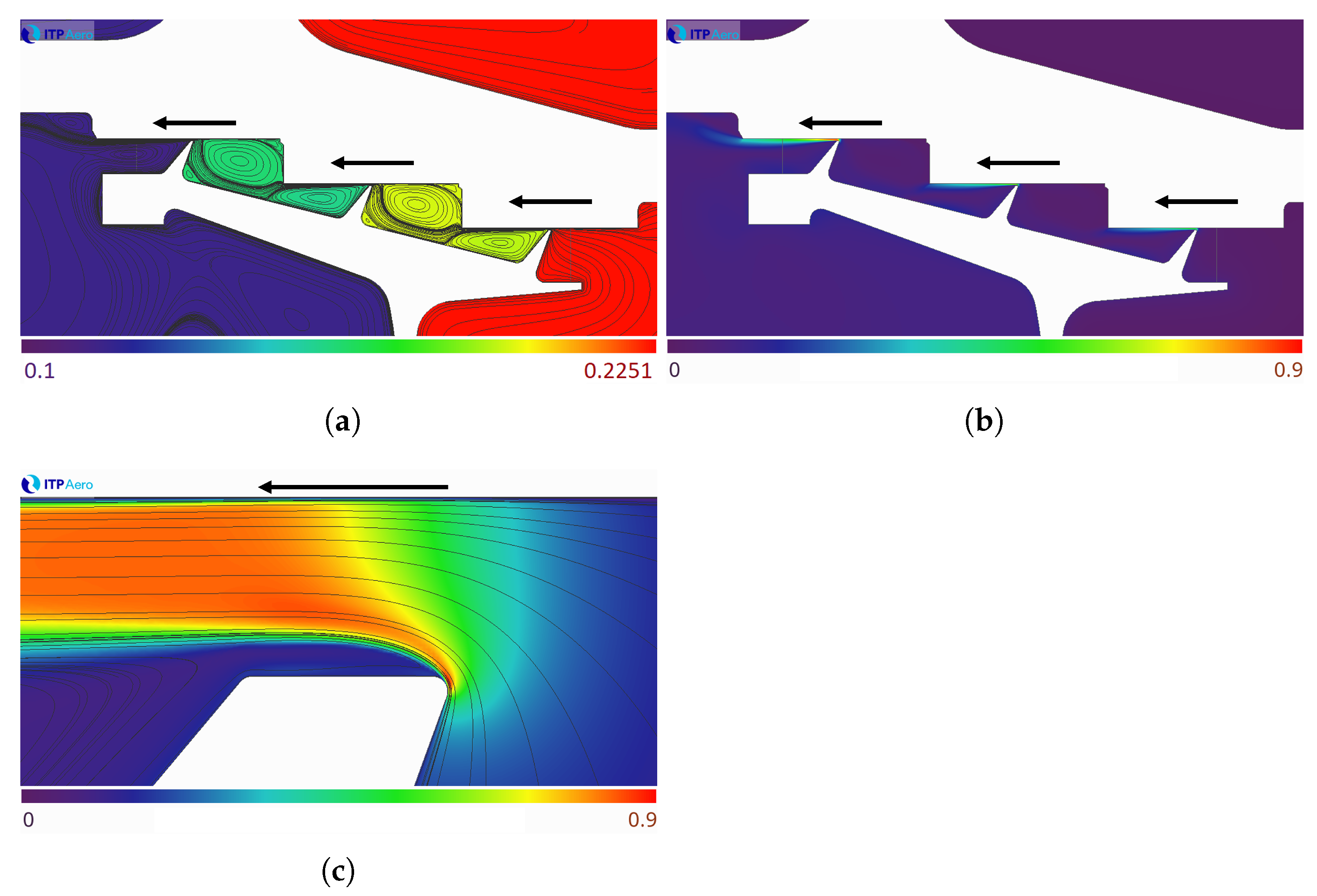
The steady flow in labyrinth seals exhibits a very complex structure with different vortices filling the cavities. Despite this complexity, there are two main regions to consider as depicted in
Figure 11:
The flow inside the cavities (both inner seal cavities and outer cavities) is a low velocity flow. Ignoring the swirl, the meridional Mach number is approximately 0.1 in that region. The static pressure is roughly uniform inside each of the cavities.
The flow in the tip gaps has a much higher Mach number, with the last (left-most) fin being essentially choked in most operation points. This is the region responsible for most of the pressure losses in the seal.
A remarkable feature of the flow in the tip gaps is the re-circulation bubble that often appears. This bubble varies in size depending on the operation point but usually affects a significant part (around 25%) of the gap. In practice, this leads to a significant reduction in the effective gap, leading to smaller mass flow through the seal than could be expected from the nominal gap under ideal conditions.
Such characteristics make the CFD simulations more challenging than in other turbine elements such as the blades. The extremely different length and time scales associated with the gaps and cavities regions are not the ideal conditions for numerical codes. Moreover, boundary layers in the fin gaps should be well captured due to its relevance in the results (i.e., re-circulation bubble size and mass flow), imposing severe restrictions to the mesh in the region. Finally, convergence in the low-speed regions of the external cavities can be slow, especially for the thermal part of the problem, making it advisable to use an initial solution with a reasonable temperature field.
When comparing the measurements obtained in the experimental campaign with the predictions obtained with the aforementioned methodology, non-negligible discrepancies may be found (see
Table 2). There are several possible sources for these discrepancies:
Deformation of the rotating seal due to the steady loading, including centrifugal forces and pressure differences. Note that our CFD simulations considered the nominal geometry of the seal, that is, static deformation was not included.
Manufacturing and/or positioning tolerances changing the gap value from the nominal one.
Mismatch between the CFD predictions and the real flow structure. RANS simulations are inherently limited when dealing with complex flows, and even small errors in the prediction of the size of the re-circulation bubble at the fin tips or the turbulent viscosity in that region can significantly affect the mass flow prediction.
Rubbing or contact between the rotating seal and the stator, which can cause damage both parts and increase the gaps.
In our case, static deformations obtained from the FEM analysis are small (less than 10% of the total gap) and their impact on the steady field is limited. Moreover, as illustrated in
Figure 7, the static deformation tends to close the fin clearances in most of the cases analysed, with the single exception of the 0 rpm case for the baseline configuration in which the left-most fin is opening. Therefore, including the effect in the CFD model would further degrade the matching between simulations and experimental data. Another remarkable point is that the discrepancies found depend on the operating point, which makes us think that the term associated with the CFD (RANS) limitations when calculating the re-circulation bubble has a non-negligible importance, at least as important as manufacturing or assembling tolerances. However, that term alone does not justify differences of up to 20% in mass flow and does not explain why those differences are much smaller for the two-fin seal.
Having said that, the only explanation left is the rubbing. There was evidence of rubbing appearing during the tests leading to a gap widening, which will perfectly explain why the experimental mass flow was higher than that calculated by the CFD. Another interesting point is that as both static and dynamic displacements are higher for the baseline geometry than for the 2-fin seal, it is fair to think that contacts will be more severe in the former, explaining why we are not finding the same level of discrepancies for both seals. However, although rubbing was detected, it was not quantified how much it affected the gaps, which did not allow us to use that information to correctly model the actual geometry in our simulations.
At this point, a different approach had to be followed. Instead of imposing the radial gaps, which essentially were unknown due to the contacts between rotor and stator, it makes sense to try to impose the pressure and mass flow as measured and then develop a numerical procedure to adjust the gaps in order to match those steady magnitudes in our CFD. It consisted of a Newton–Raphson iterative method using numerical differentiation to obtain the Jacobian. For a seal with “N” fins, the system of equations to be solved imply “N-1” equations corresponding to the “N-1” cavities pressure, plus an additional equation corresponding to the mass flow, with “N” gap unknowns (see Equations (
2) and (
3)):
The different partial derivatives are calculated using numerical differentiation by means of CFD simulations with individually modified gaps (+10% in concrete). Additionally, a simulation where all the fin gaps are uniformly modified allows us to calculate the required uniform
that would yield the experimental mass flow. Taking these new gaps as a reference, the right-hand side of Equation (
3) is zero, which simplifies the resolution of the system. The calculated
will then be applied to these new reference gaps, not the nominal ones, yielding the final resulting gaps. The process should be repeated until the desired convergence level is reached. In practice, in most cases, the results were acceptable after a single iteration. The obtained errors both in pressures and mass flow are shown in
Table 3.
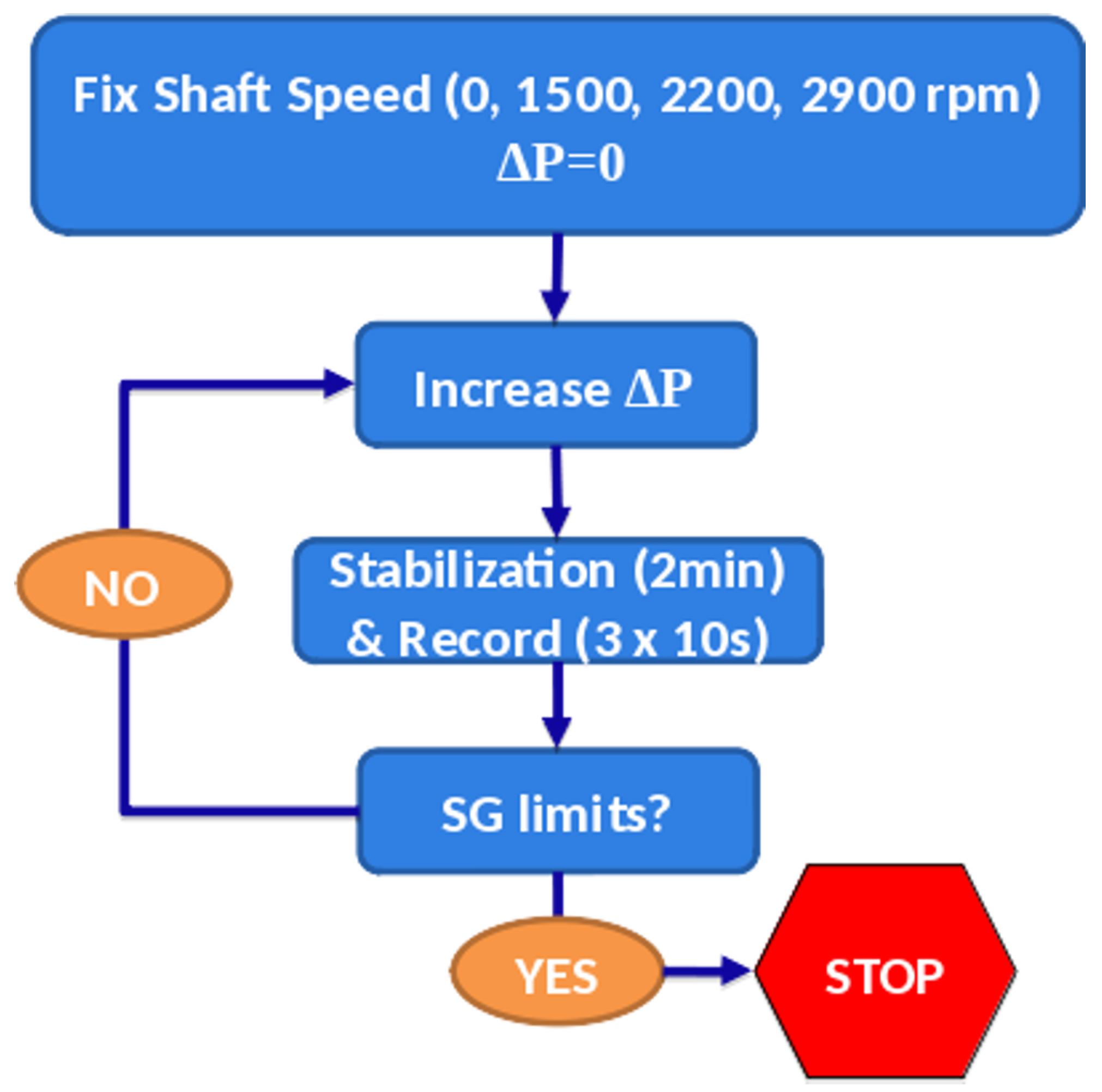
4.4. Seal Stability
The experimental measurements corresponding to the baseline and two-fin specimens are plotted in
Figure 13 and
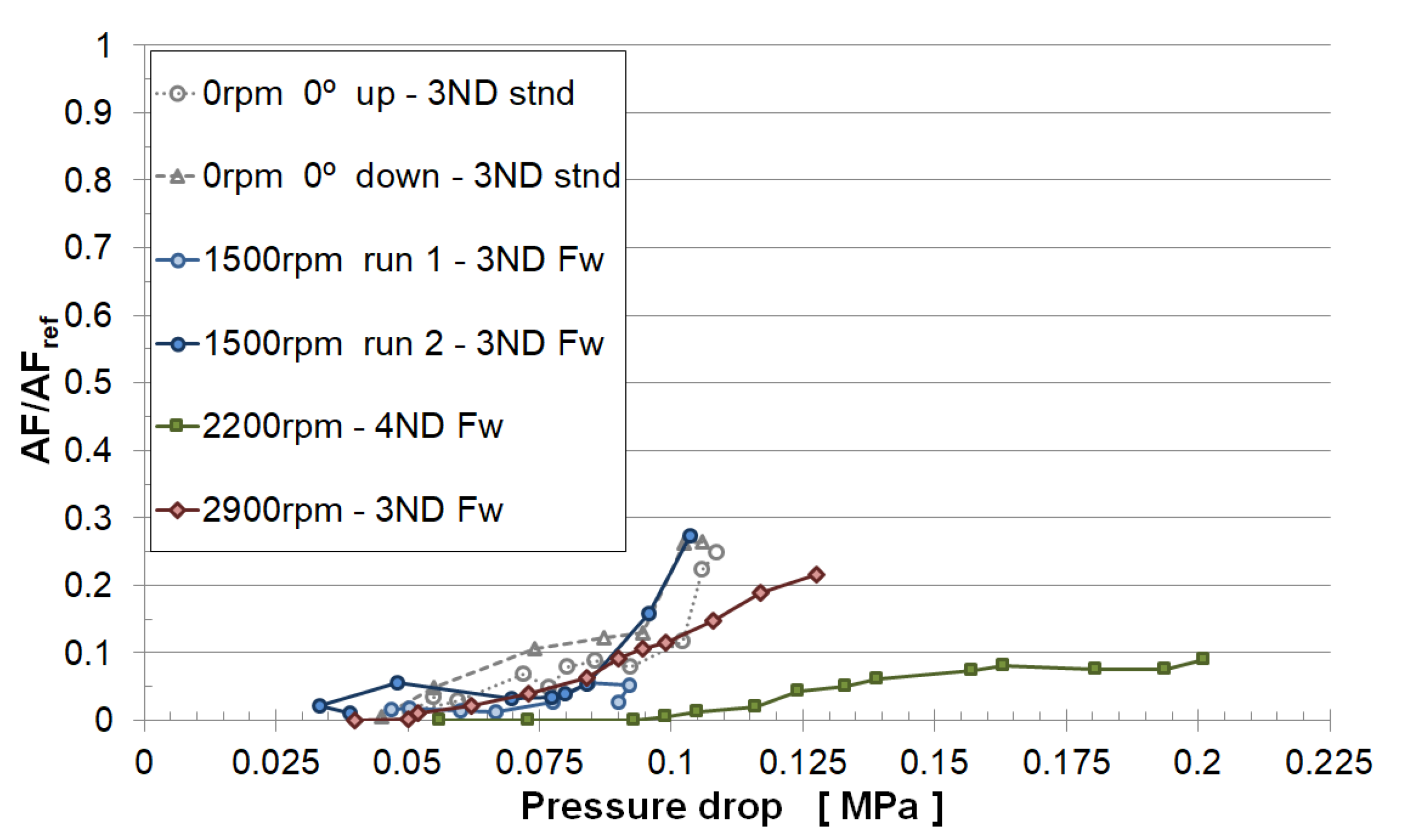
Figure 14, respectively. In concrete, these graphs plot the vibration amplitude–frequency parameter (AF) as a function of the pressure drop across the seal. Note that AF values have been normalised with the maximum AF measured in all the campaign, using that same reference value in all of the plots. Each line represents the different nodal diameters detected, discerning between standing waves (stnd) and forwards (Fw) or backwards (Bw) travelling waves.
The most remarkable outcome from the experiments is that all of the specimens experimented flutter at every rotational speed tested. Depending on the seal specimen and rotational speed chosen, the minimum pressure drop required to initiate the instability was different. Once flutter appeared, the vibration amplitude could grow really fast as results plotted in
Figure 13 show, underlining the importance of a good control system to allow an easy, fast and safe termination of the test.
Comparing results between the baseline and two-fin geometries (
Figure 13 and
Figure 14), two main differences can be found. First, the two-fin seal becomes more unstable at lower pressure ratios than the baseline specimen does, that is, it reaches its unstable region before; second, the vibration amplitudes rise more abruptly in the baseline case, implying a higher absolute aerodynamic damping level (this point is confirmed by CFD simulations, see
Figure 15). Summarising, the two-fin seal reaches its unstable region first, but once we enter that region, the instability itself is less severe than that observed in the baseline configuration.
Both points can be easily related to the modal shapes and frequencies of both seals. Regarding the modal shape or torsion centre position, the baseline seal can be considered as a HPS seal, while the two-fin seal is an LPS seal (see
Figure 9 and
Figure 10). However, the two-fin seal behaves in the opposite sense as a combination of being inclined and having relatively high axial displacements when compared to the radial ones (note the radial position of the corresponding torsion centre in
Figure 10). The Corral–Vega model for stepped seals [
8] covers this fact. Thus, as both seals behave as HPS-supported seals, the one with the higher frequency will be the one closer to the unstable region, according to Abbot’s criteria. As it was mentioned before,
Figure 8 shows that effectively, the two-fin seal is the one with higher modal frequencies.
Finally, regarding the absolute value of the damping itself, it should be taken into account that the baseline configuration has an additional cavity positioned further from the pivot point, thus producing higher unsteady pressure levels and work per cycle. In fact, in the two-fin seal specimen, the pivot point lies somewhere in between the two fins, splitting the inter-fin cavity into two regions that will produce works per cycle with the opposite sign, reducing its capability to produce high levels of aerodynamic damping.
Before showing the stability results from the CFD simulations, a couple of clarifications should be made. The first thing to consider is that our simulations do not include any mechanical damping and do not attempt to calculate any vibration amplitude. That kind of study is beyond the scope of this paper. The target of our analysis is to determine whether the seal is aerodynamically unstable when operating at a given condition. This is a necessary but not sufficient condition to have flutter, as mechanical friction could prevent vibration depending on the relative importance of both terms. In addition, when more than a single unstable nodal diameter coexists, the most unstable one (after considering the mechanical damping) tends to prevail. With that in mind, it is not a surprise that simulations predict a wider set of unstable nodal diameters than those detected by the experimental readings. The only thing that can be demanded to simulations of the kind presented here is that the experimentally measured nodal diameters are among the predicted set of unstable ones.
Figure 15 depicts the impact of the adjusted clearances on the aerodynamic damping both for the baseline and two-fin geometries. It is remarkable how the effect can modify the sign of the damping for some nodal diameters, that is, its stability. The influence of the fin gaps over the aerodynamic damping comes from both the steady and unsteady flow fields modification. Generally, equally closing the gaps tends to destabilise the seal. However, when the seal exhibits dissimilar clearances (as it happens in our adjusted gaps case and in real operation), the behaviour is complex and difficult to predict in advance [
18].
Table 4 and
Table 5 summarise the results for all operating conditions. The first point to highlight is that both geometries have been predicted as unstable (negative aerodynamic damping) for all the shaft speeds, as it happened in the testing campaign. However, the predicted instabilities are only in moderate agreement with the experiments. Regarding the baseline geometry, the nominal gaps simulation correctly predicted all the instabilities; although, the adjustment procedure modifies the results reducing the list of unstable nodal diameters. Note that, for the 2900 rpm case, the simulations with adjusted gaps predict a stabilization of ND + 4, which was the one observed in the experiments. A deeper analysis indicates that ND + 4 (backwards wave) is operating in a region close to the stability limit. This region is really sensitive to details, with minor changes in the involved parameters producing big changes in damping values, both in sign and magnitude, and thus, it is hard to predict by the simulations. For instance, the uncertainties regarding the actual gap values in the experiments could explain the difference.
In contrast, the two-fin specimen simulations do not match the experimental measurements so well, failing to predict the 0 rpm case and not capturing the travelling wave sign in the 2900 rpm case. It should be mentioned that the instability at 1500 rpm (ND − 3) is well captured only after the gap-adjustment process takes place, even though the gap correction for the two-fin geometry was not too big. This fact emphasises the necessity to feed the simulations with the right gap values.
All the results shown so far correspond to the simulations performed with the simplified domain (see
Figure 6). By simplifying the domain, we intend to reduce the computational cost, but at the same time, we are neglecting the effect of outer cavities in the overall stability of the seal. Although this is essentially true in most cases, as unsteady pressure plots in
Figure 12 show, external cavities may play a non-negligible role regarding stability under certain circumstances. When vibration frequencies approach the natural frequencies of those cavities, a resonance occurs and noticeably unsteady pressure levels may appear. Moreover, that pressure will act over a wide seal surface, thus having the potential to become the dominant term of the problem. Keeping that in mind, additional simulations using the full domain have been run. This domain incorporates the whole seal structure along with the actual geometry of the external cavities (see
Figure 6).
Before going on to comment on the stability changes observed in these additional simulations, it is worth mentioning that the steady state remains almost unaffected, and so previously shown results and discussion regarding the steady results still applies. Having said that, the first thing we observe in the unsteady linearised problem solutions is that CFD confirms that the seal vibration is exciting the outer cavities resonances for some nodal diameters, as
Figure 16 shows.
Figure 17 gives a closer look at the effect, comparing the resulting aerodynamic damping curves with and without the external cavities contribution. It can be clearly seen that nodal diameter 0 is stabilised by the external cavity resonance in both configurations. For the baseline configuration, the effect is weak apart from the ND 0 resonance, as expected. In contrast, the same can not be said for the two-fin configuration. As mentioned before, the aerodynamic damping produced by this seal is low when compared to the baseline case. Therefore, it is easier for the external cavities to modify the seal stability, even when no external resonance is being excited.
Table 6 and
Table 7 summarise the stability results from the CFD simulations including the external cavities.
Regarding the agreement between simulations and experimental stability, we must highlight that the new results obtained for the two-fin geometry (shown in
Table 7) perfectly match the experiments in all the operating points analysed. However, for the baseline configuration we obtain mixed results; while we are improving the matching in some aspects, (ND 4 is not predicted as unstable at 0 rpm or ND 5 instability is reduced to the forwards travelling wave at 2200 and 2900 rpm, in line with the tests) it seems we are over predicting the effect of external cavities over the ND 4 backwards travelling wave, which suffers a complete stabilization at 1500 rpm (see
Figure 17a), in contrast with the experimental data. Here, the same comments as before apply. The ND + 4 is close to the stability limit (i.e., aerodynamic damping 0) and in an operating region really sensible to details. Therefore, it is hard to predict by the simulations.
Overall, we think the agreement between the detailed simulations (i.e., adjusted gaps and full domain) and experimental data is really good, only failing to predict the aforementioned travelling wave sign of ND 4 instability in the baseline configuration.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}