
Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy Sources



Abstract
:1. Introduction
- ▪
- A new strong JSO-based bio-inspired approach is used to determine the parameters of the MFOPID controller to ensure optimal controller behavior, which is required to control the system’s frequency and power variations.
- ▪
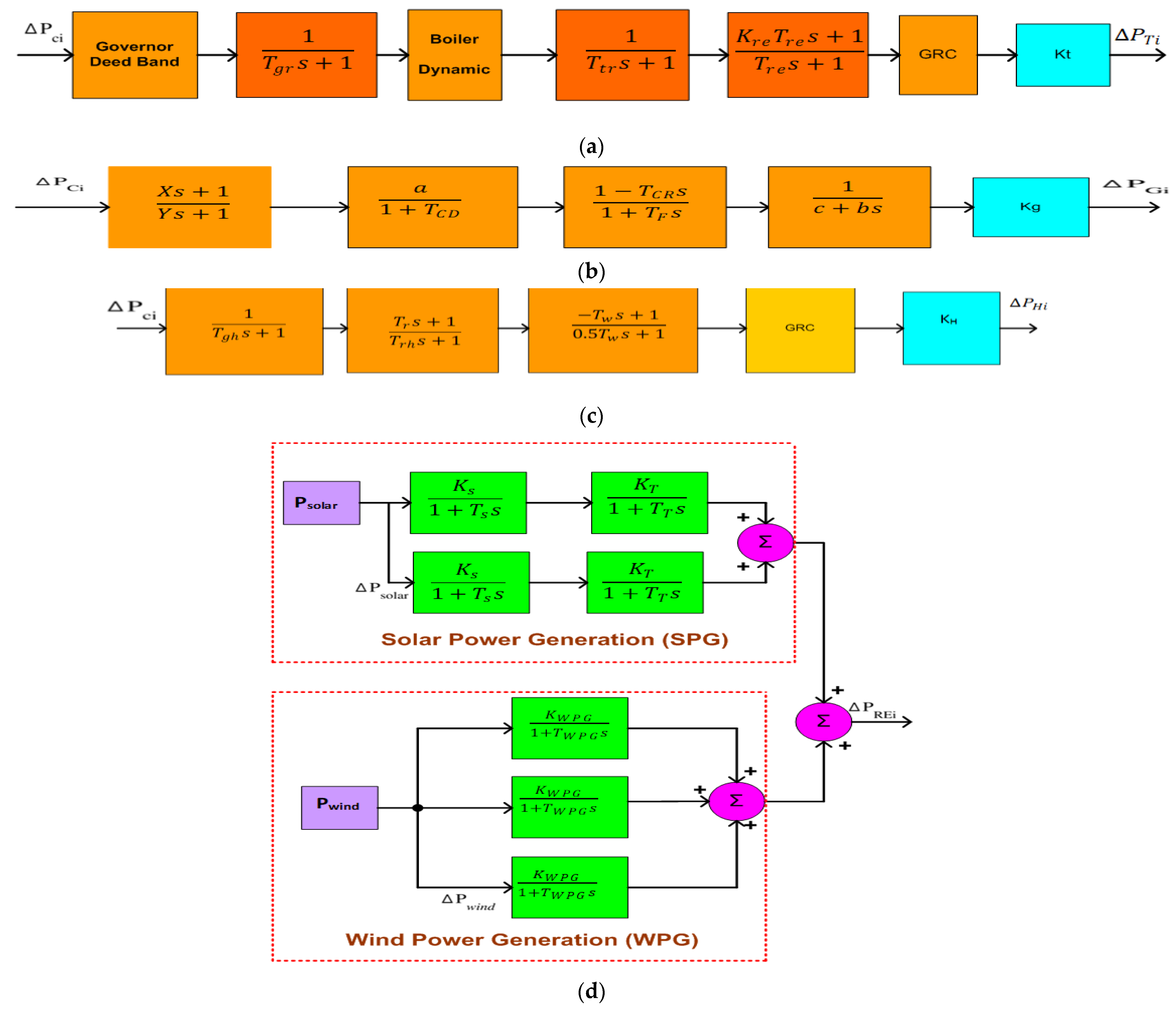
- The realistic model was considered by integrating various nonlinearities such as GDZ, GRL, BD and CTD for a hybrid power system with conventional and RES such as photovoltaic and wind energy.
- ▪
- A comparison of the performance of the MFOPID controller to that of FOPID, PI, and PID controllers to demonstrate its superiority.
- ▪
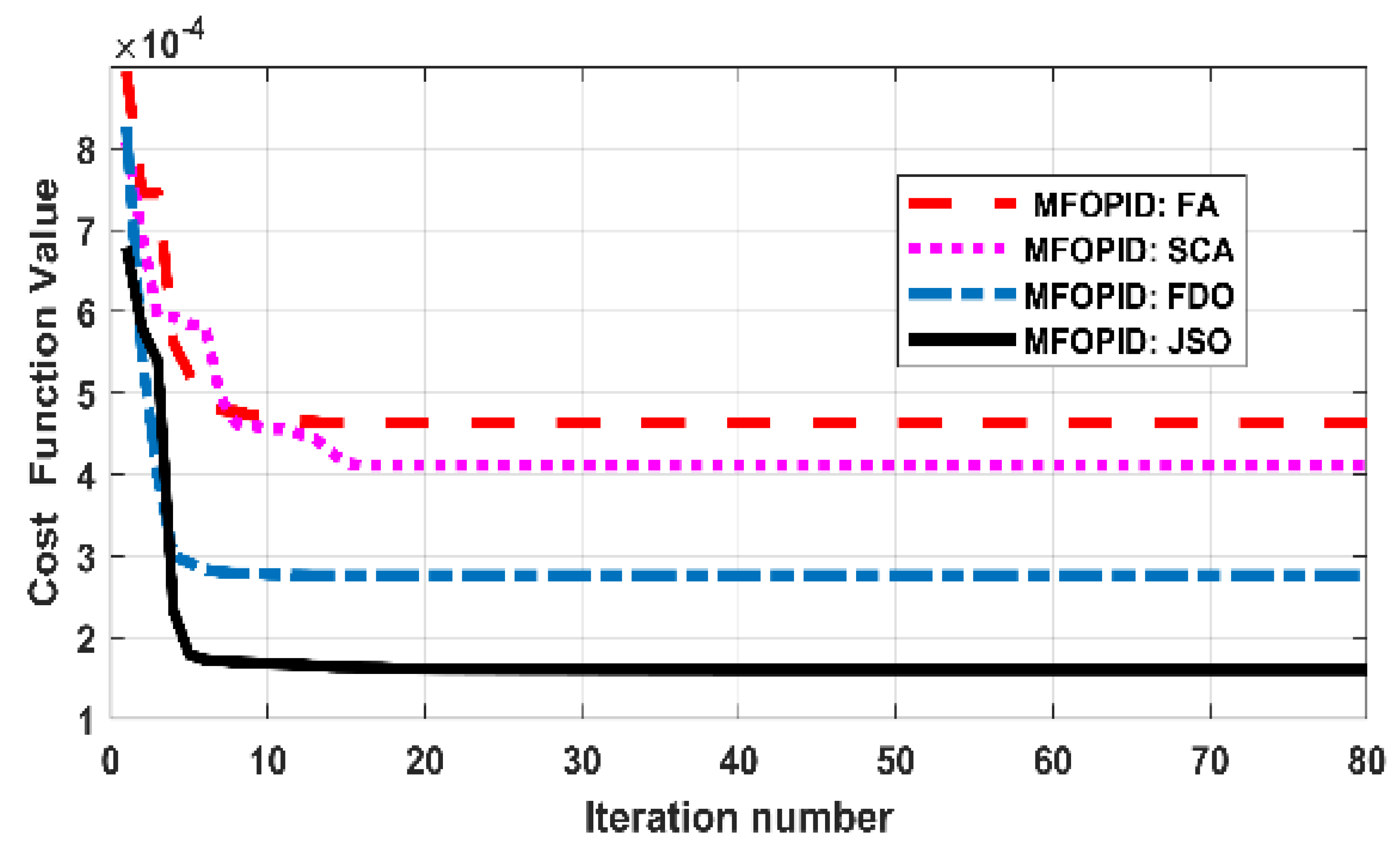
- A demonstration of the efficacy of the JSO algorithm by comparing its performance with benchmark algorithms such as SCA, FA and FDO.
- ▪
- The robustness of the suggested controller algorithm is evaluated using a series of test cases in which the load step perturbation (SLP) and system parameters are randomly altered.
2. Power System Model
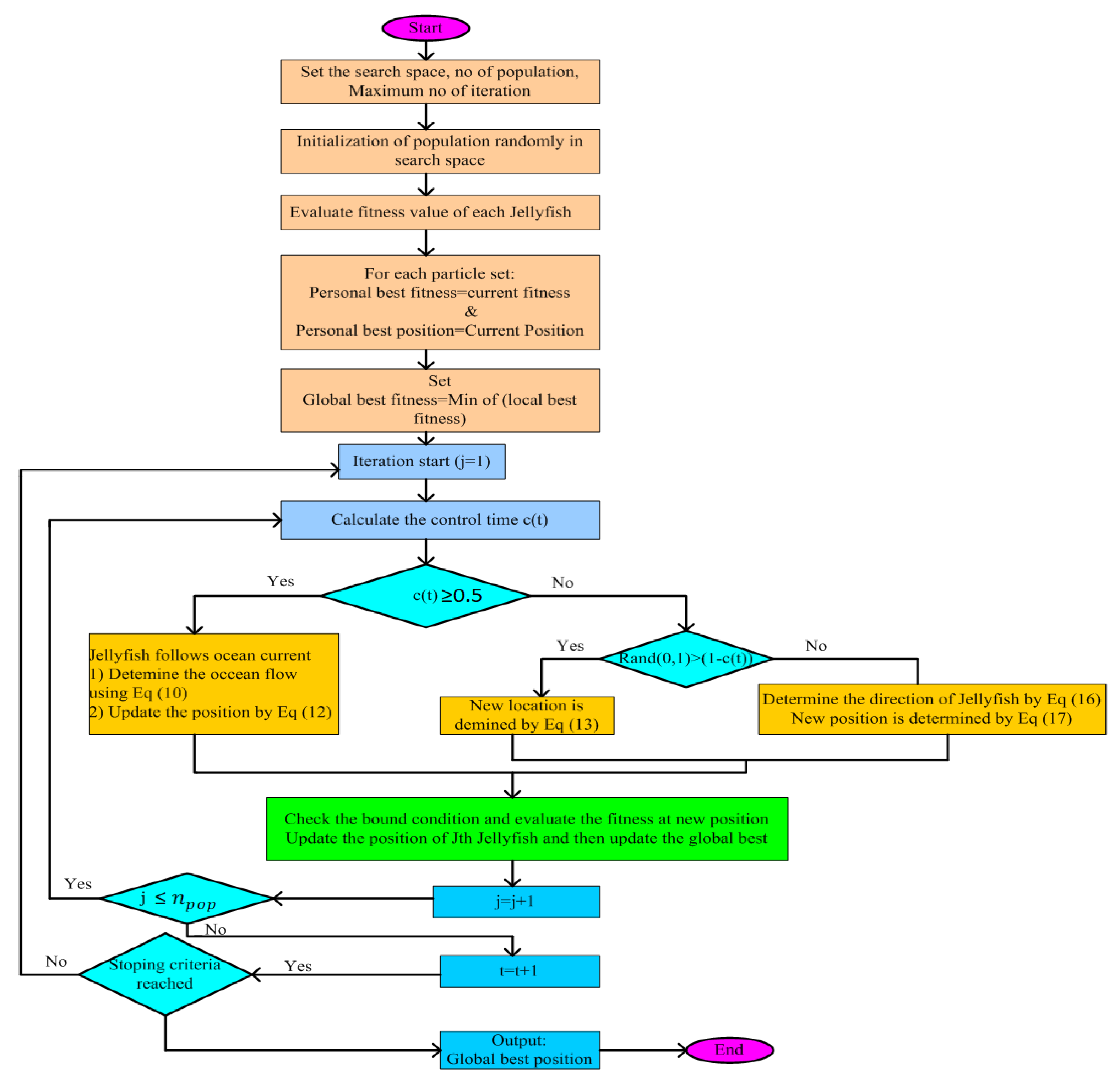
3. Jellyfish Search Algorithm (JSO)
3.1. Initialization of Population
3.2. Following Ocean Current
3.3. Jellyfish Swarm
3.4. Time Control Mechanism
3.5. Boundary Conditions
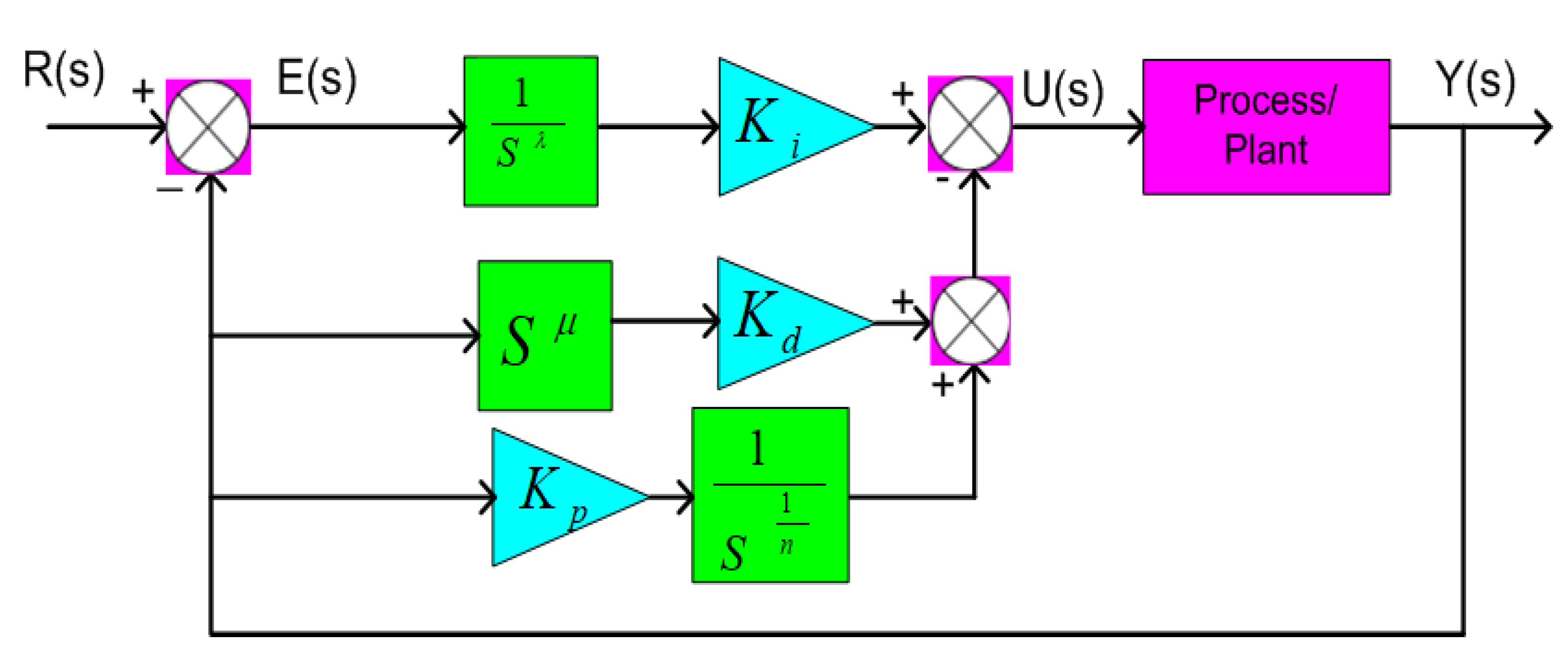
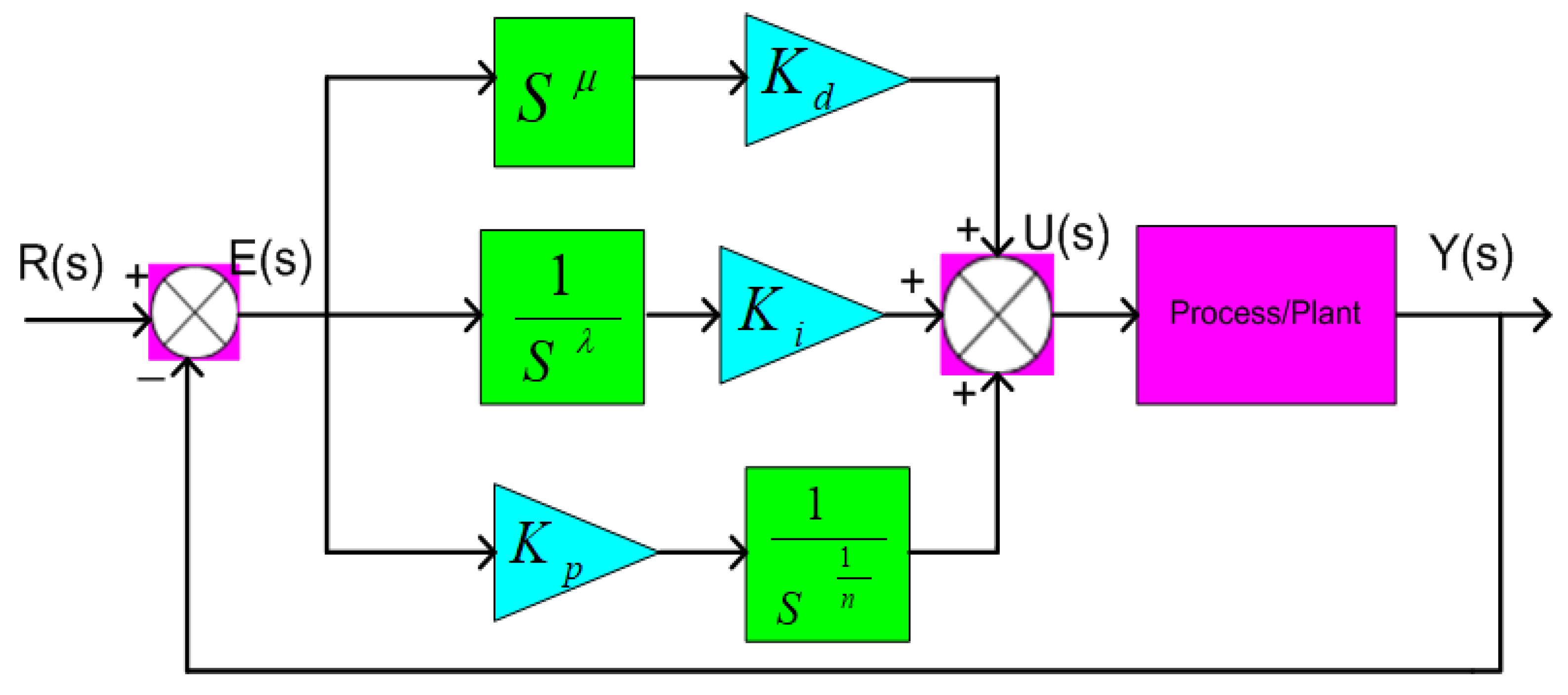
4. Controller Structure and Fitness Function
5. Implementation, Results and Discussion
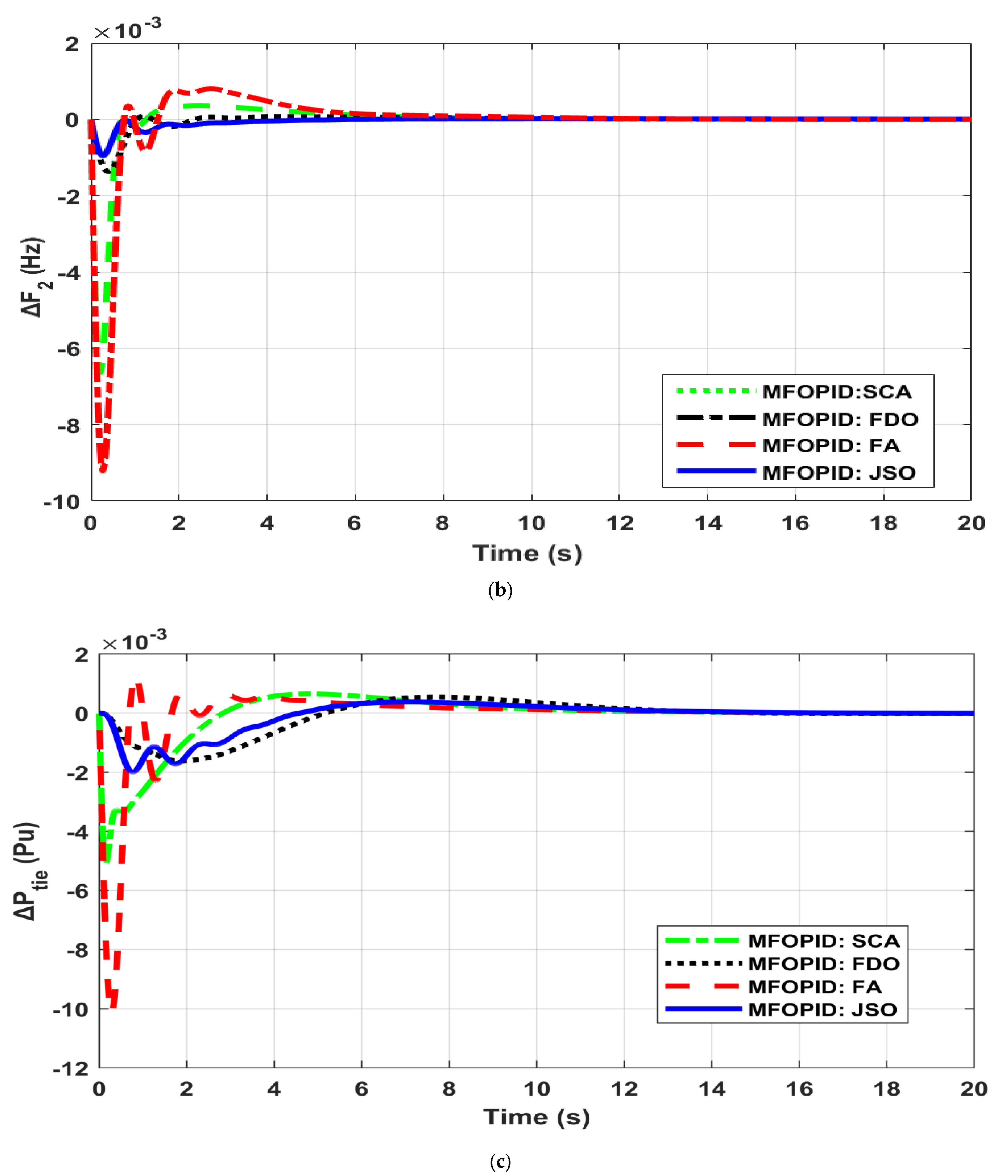
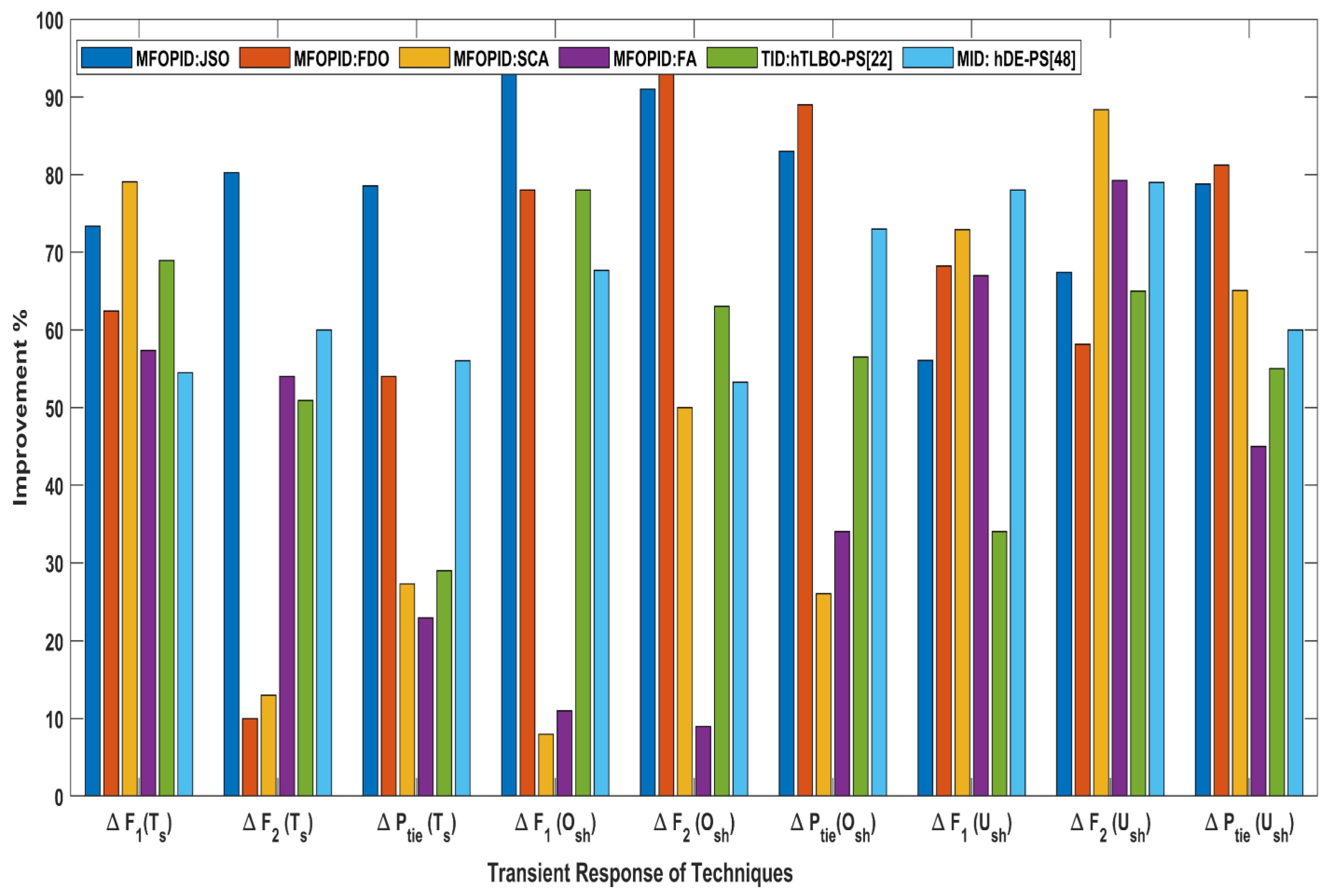
5.1. Case-1 (Comparison in Terms of Algorithm)
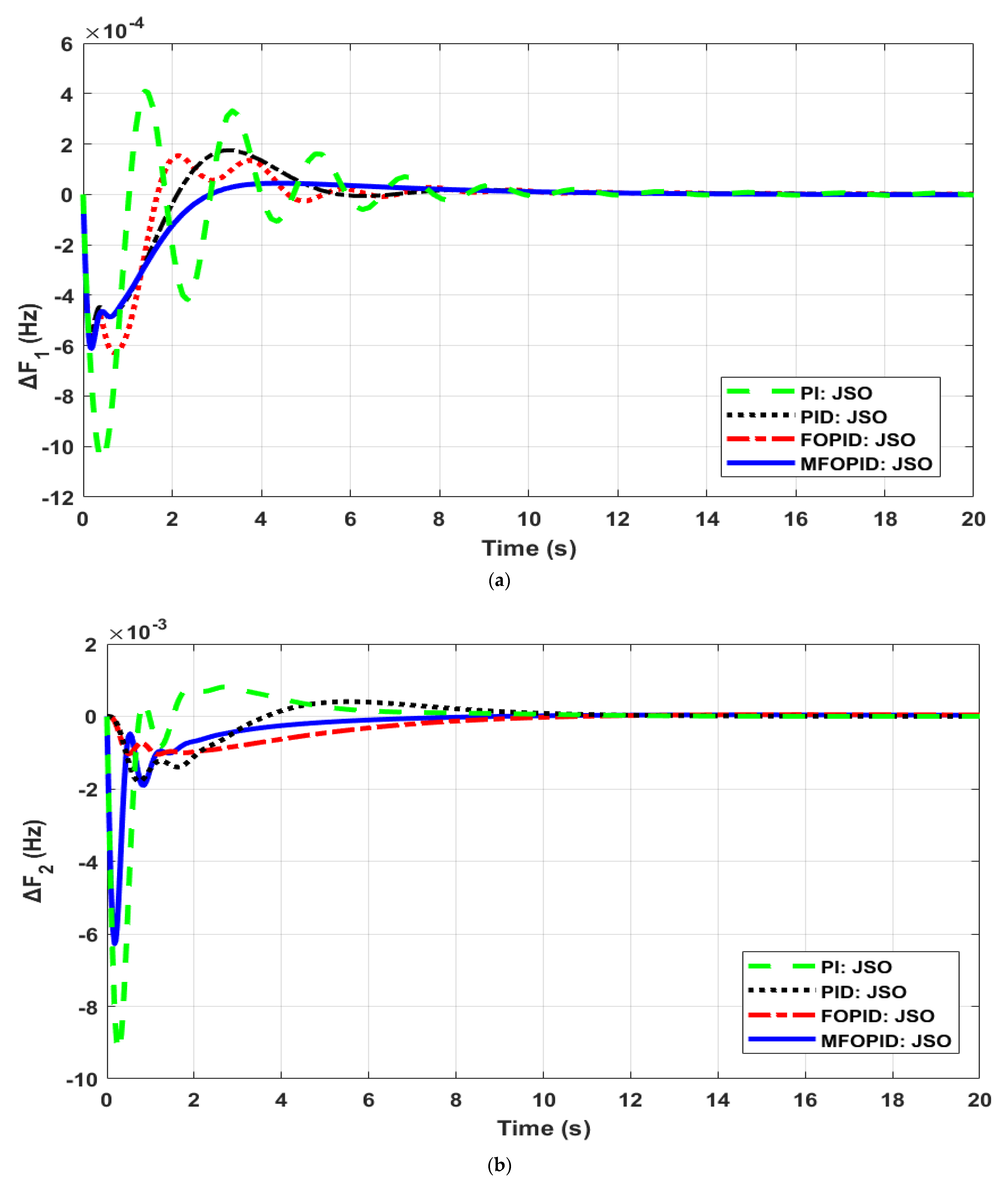
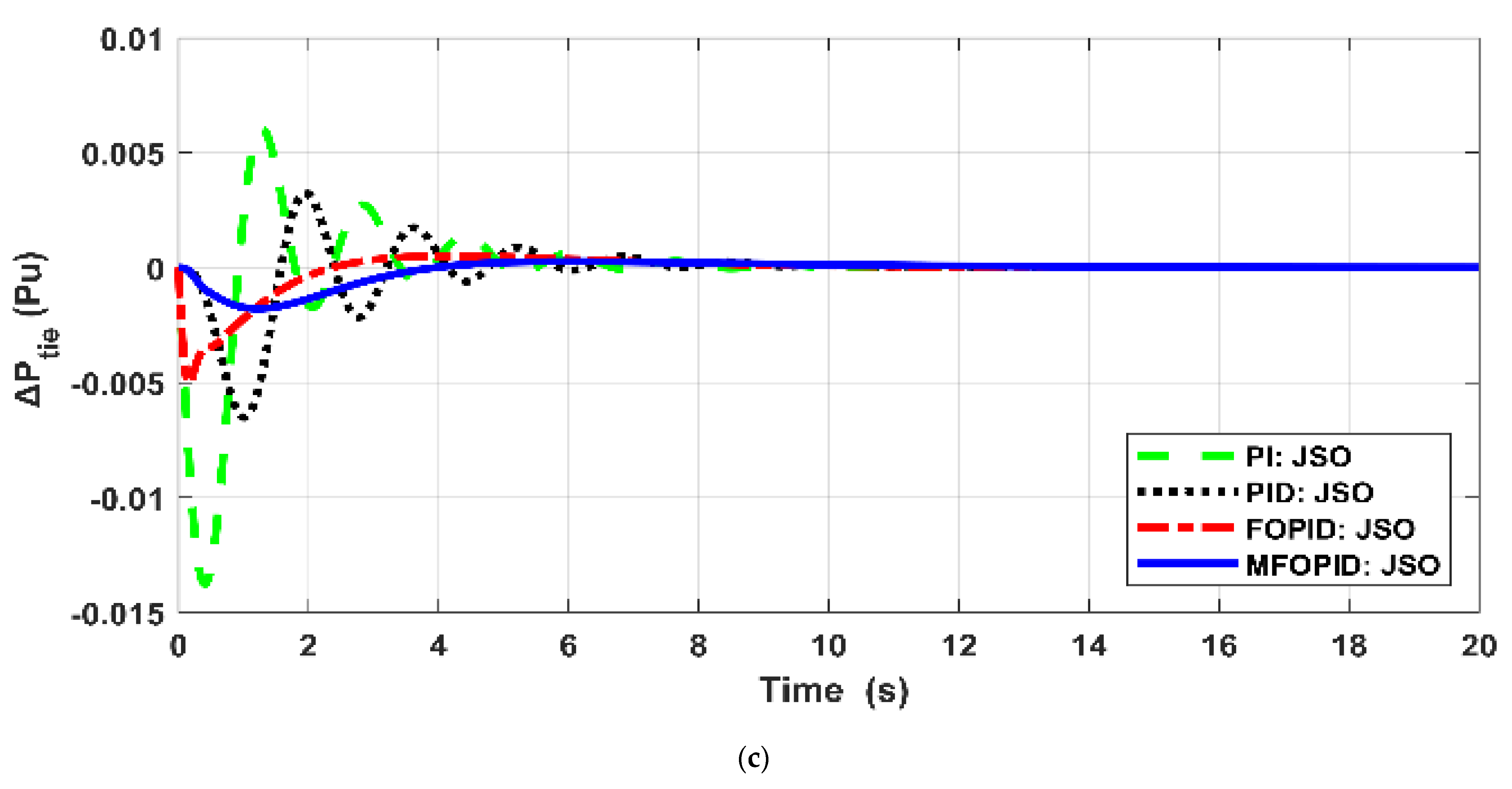
5.2. Case-2 (Comparison in Terms of Controller)
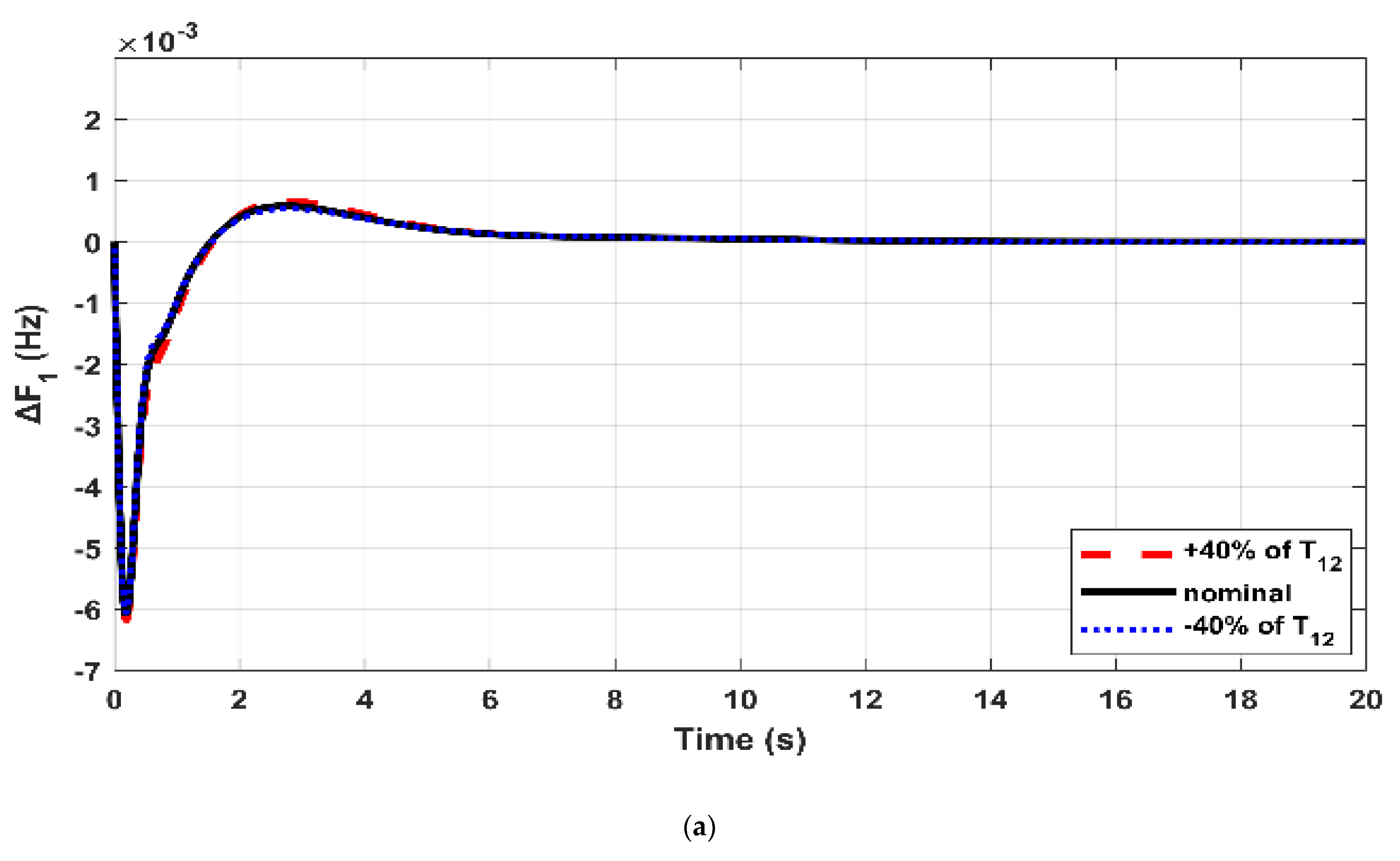
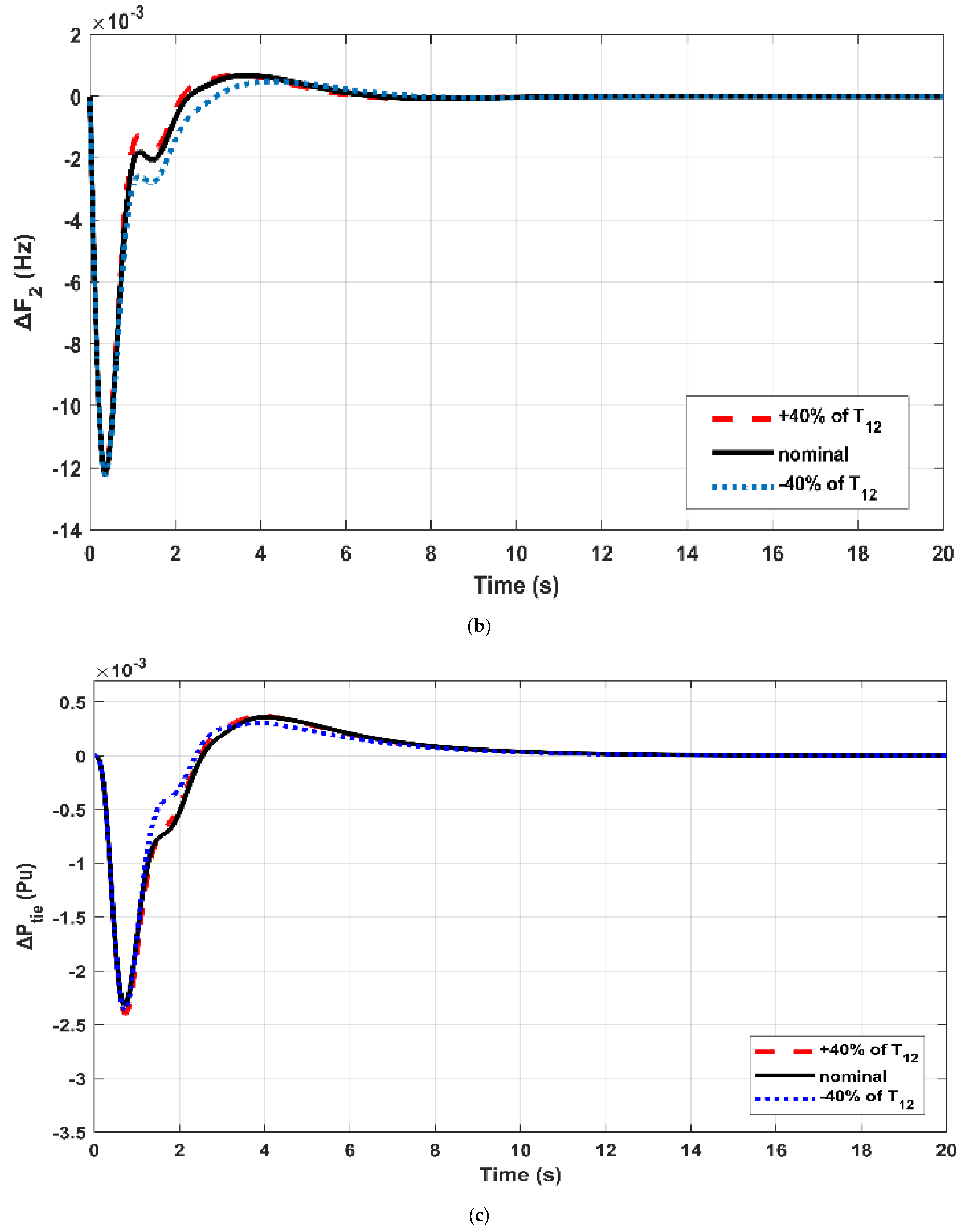
5.3. Sensitivity Analysis
6. Conclusions and Future Direction
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Parametric Values of Hybrid PS [8,23,48]
| Parameters and Their Values for LFC Model | |||
| Parameter | Value | Parameter | Value |
| Rt (Hz/MW) | 2.4 | Rg (Hz/MW) | 2.4 |
| Rh (Hz/MW) | 2.4 | Kps1, Kps2 | 68.97 |
| Tps1, Tps2 | 11.49 | β1, β2 | 0.4312 |
| Parameters and their values for Reheat Thermal Power System | |||
| Kre | 0.3 | Ttr | 0.3 |
| Tre | 10 | Tgr | 0.08 |
| Kt | 0.54367 | ||
| Parameters and their values for Gas Power System | |||
| X | 0.6 | TCR | 0.01 |
| b | 0.049 | C | 1 |
| a | 1 | Y | 1.1 |
| Kg | 0.8 | TCD | 0.2 |
| TF | 0.239 | ||
| Parameters and their values for Hydro Power System | |||
| Tr | 5 | Trh | 28.749 |
| Tw | 1 | Tgh | 0.2 |
| Kh | 0.32586 | ||
| Parameters and their values for Renewable energy resources | |||
| KWTG | 1 | TWTG | 1.5 |
| Ts | 1 | TT | 0.3 |
| Ks | 0.5 | KT | 1 |
| Parameters and their values for Boiler Dynamic | |||
| T1b | 0.545 | K1b | 0.950 |
| Trb | 0.545 | Tf | 0.23 |
| Cb | 200 | K3 | 0.92 |
| K1 | 0.85 | K2 | 0.095 |
| Tr | 1.4 | Trh | 28.75 |
Appendix B. Value of JSO Parameters
| Parameters | Values | Parameters | Values | Parameters | Values | Parameters | Values |
| No of Population (Np) | 40 | No of Iteration | 80 | Lower limit (Lb) | −2 | Upper Limit (Ub) | 2 |
| No of dimension | 5 | Constant factor (c0) | 4 | Coefficient factor (ϒ) | >0 |
References
- Hassan, A.; Aly, M.; Elmelegi, A.; Nasrat, L.; Watanabe, M.; Mohamed, E.A. Optimal Frequency Control of Multi-Area Hybrid Power System Using New Cascaded TID-PIλDμN Controller Incorporating Electric Vehicles. Fractal Fract. 2022, 6, 548. [Google Scholar] [CrossRef]
- Barakat, M. Novel chaos game optimization tuned-fractional-order PID fractional-order PI controller for load–frequency control of interconnected power systems. Prot. Control Mod. Power Syst. 2022, 7, 16. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Waseem, A.; Azar, A.T.; Haq, I.U.; Ullah, Z.; Aslam, S. Automatic generation control of multi-source interconnected power system using FOI-TD controller. Energies 2021, 14, 5867. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Ebeed, M.; Kamel, S. A robust PID controller based on linear quadratic Gaussian approach for improving frequency stability of power systems considering renewables. ISA Trans. 2021, 117, 118–138. [Google Scholar] [CrossRef] [PubMed]
- Debnat, M.K.; Patel, N.C.; Mallick, R.K. Optimal base PD-PID controller for automatic generation control of multi-source tuned by teaching learning base optimization algorithm. In Proceedings of the 7th International Conference on Power Electronics (IICPE), Patiala, India, 17–19 November 2016; pp. 1–6. [Google Scholar]
- Guha, D.; Roy, P.K.; Banerjee, S. Disturbance observer aided optimised fractional-order three-degree-of-freedom tilt-integral-derivative controller for load frequency control of power systems. IET Gener. Transm. Distrib. 2021, 15, 716–736. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Haq, I.U.; Khan, K.B.; Laghari, G.F.; Zafar, F. Modified PID controller for automatic generation control of multisource interconnected power system using fitness dependent optimizer algorithm. PLoS ONE 2020, 15, e0242428. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. BFOA-scaled fractional order fuzzy PID controller applied to AGC of multi-area multi-source electric power generating systems. Swarm Evol. Comput. 2017, 32, 202–218. [Google Scholar] [CrossRef]
- Fathy, A.; Kassem, A.M. Antlion optimizer-ANFIS load frequency control for multi-interconnected plants comprising photovoltaic and wind turbine. ISA Trans. 2019, 87, 282–296. [Google Scholar] [CrossRef]
- Shah, R.; Preece, R.; Barnes, M. The impact of voltage regulation of multi-infeed VSC-HVDC on power system stability. IEEE Trans. Energy Convers. 2018, 33, 1614–1627. [Google Scholar] [CrossRef]
- Zhang, G.; Mccalley, J.; Wang, Q. An AGC dynamics-constrained economic dispatch model. IEEE Trans. Power Syst. 2019, 34, 3931–3940. [Google Scholar] [CrossRef]
- Gupta, A.K. Robust coordinated control for damping low frequency oscillations in high wind penetration power system. Int. Trans. Electr. Energ Syst. 2019, 29, e12006. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. State-of-the-art of controllers and soft computing techniques for regulated load frequency management of single/multi-area traditional and renewable energy-based power systems. Appl. Energy 2020, 266, 114858. [Google Scholar] [CrossRef]
- Khezri, R.; Oshnoei, A.; Oshnoei, S.; Bevrani, H.; Muyeen, S.M. An intelligent coordinator design for GCSC and AGC in a two-area hybrid power system. Appl. Soft Comput. 2019, 76, 491–504. [Google Scholar] [CrossRef]
- Ganguly, S.; Mahto, T.; Mukherjee, V. Integrated frequency and power control of an isolated hybrid power system considering scaling factor based fuzzy classical controller. Swarm Evol. Comput. 2017, 32, 184–201. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.; Banerjee, S. Performance evolution of different controllers for frequency regulation of a hybrid energy power system employing chaotic crow search algorithm. ISA Trans. 2021, 113, 231–241. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Double stage controller optimization for load requency stabilization in hybrid wind-ocean wave energy based maritime microgrid system. Appl. Energy 2021, 282, 116171. [Google Scholar] [CrossRef]
- Prostejovsky, A.M.; Marinelli, M.; Rezkalla, M.; Syed, M.H.; Guillo-Sansano, E. Tuningless load frequency control through active engagement of distributed resources. IEEE Trans. Power Syst. 2018, 33, 2929–2939. [Google Scholar] [CrossRef] [Green Version]
- Irudayaraj, A.X.R.; Wahab, N.I.A.; Umamaheswari, M.; Radzi, M.A.M.; Sulaiman, N.B.; Veerasamy, V.; Prasanna, S.C.; Ramachandran, R. A Matignon’s theorem-based stability analysis of hybrid power system for automatic load frequency control using atom search optimized FOPID controller. IEEE Access 2020, 8, 168751–168772. [Google Scholar] [CrossRef]
- Ahmed, M.; Magdy, G.; Khamies, M.; Kamel, S. Modified TID controller for load frequency control of a two-area interconnected diverse unit power system. Int. J. Electr. Power Energy Syst. 2022, 135, 107528. [Google Scholar] [CrossRef]
- Bhuyan, M.; Das, D.C.; Barik, A.K. Proficient power control strategy for combined solar gas turbine-wind turbine generator-biodiesel generator based two area interconnected microgrid employed with DC link using Harris’s hawk optimization optimised tilt-integral-derivative controller. Int. J. Numer. Model. Electron. Netw. Device Fields 2022, 35, e2991. [Google Scholar] [CrossRef]
- Khamari, D.; Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic generation control of power system in deregulated environment using hybrid TLBO and pattern search technique. Ain Shams Eng. J. 2019, 11, 553–573. [Google Scholar] [CrossRef]
- Daraz, A.; Abdullah, S.; Mokhlis, H.; Haq, I.U.; Fareed, G.; Mansor, N.N. Fitness dependent optimizer-based automatic generation control of multisource interconnected power system with non-linearities. IEEE Access 2020, 8, 100989–101003. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Fathy, A. Recent methodology-based Harris hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Coordinated SMES and TCSC damping controller for load frequency control of multi area power system with diverse sources. Int. J. Electr. Eng. Inform. 2020, 12, 747–769. [Google Scholar] [CrossRef]
- Priyadarshani, S.K.R.; Subhashini; Satapathy, J.K. Path finder algorithm optimized fractional order tilt-integral-derivative (fotid) controller for automatic generation control of multi-source power system. Microsyst. Technol. 2020, 27, 23–35. [Google Scholar] [CrossRef]
- Arya, Y. Effect of electric vehicles on load frequency control in interconnected thermal and hydrothermal power systems utilising CFFOIDF controller. IET Gener. Transm. Distrib. 2020, 14, 2666–2675. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K. Grasshopper algorithm optimized fractional order fuzzy PID frequency controller for hybrid power systems. Recent Adv. Electr. Electron. Eng. 2019, 12, 519–531. [Google Scholar] [CrossRef]
- Hasanien, H.M.; El-Fergany, A.A. Salp swarm algorithm-based optimal load frequency control of hybrid renewable powersystems with communication delay and excitation cross-coupling effect. Electr. Power Syst. Res. 2019, 176, 105938. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; Aboras, K.M.; Abbasy, N.H. Design of Cascaded PI-Fractional Order PID Controller for Improving the Frequency Response of Hybrid Microgrid System Using Gorilla Troops Optimizer. IEEE Access 2021, 9, 150715–150732. [Google Scholar] [CrossRef]
- Nayak, N.; Mishra, S.; Sharma, D.; Sahu, B.K. Application of modified sine cosine algorithm to optimally design PID/fuzzy-PID controllers to deal with AGC issues in deregulated power system. IET Gener. Transm. Distrib. 2019, 13, 2474–2487. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.; Tripathy, M. Grey wolf optimizer algorithm based fuzzy PID controller for AGC of multi-area power system with TCPS. Procedia Comput. Sci. 2016, 92, 99–105. [Google Scholar] [CrossRef] [Green Version]
- Jagatheesan, K.; Anand, B.; Samanta, S.; Dey, N.; Santhi, V.; Ashour, A.S.; Balas, V.E. Application of flower pollination algorithm in load frequency control of multi-area interconnected power system with nonlinearity. Neural Comput. Appl. 2016, 28, 475–488. [Google Scholar] [CrossRef]
- Yakout, A.H.; Sabry, W.; Abdelaziz, A.Y.; Hasanien, H.M.; AboRas, K.M.; Kotb, H. Enhancement of frequency stability of power systems integrated with wind energy using marine predator algorithm based PIDA controlled STATCOM. Alex. Eng. J. 2022, 61, 5851–5867. [Google Scholar] [CrossRef]
- Elkasem, A.H.A.; Khamies, M.; Hassan, M.H.; Agwa, A.M.; Kamel, S. Optimal Design of TD-TI Controller for LFC Considering Renewables Penetration by an Improved Chaos Game Optimizer. Fractal Fract. 2022, 6, 220. [Google Scholar] [CrossRef]
- Kumari, S.; Shankar, G. Novel application of integral-tilt-derivative controller for performance evaluation of load frequency control of interconnected power system. IET Gener. Transm. Distrib. 2018, 12, 3550–3560. [Google Scholar] [CrossRef]
- Chou, J.S.; Molla, A. Recent advances in use of bio-inspired jellyfish search algorithm for solving optimization problems. Sci. Rep. 2022, 12, 19157. [Google Scholar] [CrossRef]
- Chou, J.-S.; Truong, D.-N.; Le, T.-L.; Truong, T.T.H. Bio-inspired optimization of weighted-feature machine learning for strength property prediction of fiber-reinforced soil. Expert Syst. Appl. 2021, 180, 115042. [Google Scholar] [CrossRef]
- Ginidi, A.; Elsayed, A.; Shaheen, A.; Elattar, E.; El-Sehiemy, R. An innovative hybrid heap-based and jellyfish search algorithm for combined heat and power economic dispatch in electrical grids. Mathematics 2021, 9, 2053. [Google Scholar] [CrossRef]
- Chou, J.S.; Tjandrakusuma, S.; Liu, C.Y. Jellyfish search-optimized deep learning for compressive strength prediction in images of ready-mixed concrete. Comput. Intell. Neurosci. 2022, 2022, 9541115. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Azar, A.T.; Aslam, S.; Alkhalifah, T.; Alturise, F. Optimized Fractional Order Integral-Tilt Derivative Controller for Frequency Regulation of Interconnected Diverse Renewable Energy Resources. IEEE Access 2022, 10, 43514–43527. [Google Scholar] [CrossRef]
- Arya, Y. A new optimized fuzzy FOPI-FOPD controller for automatic generation control of electric power systems. J. Frankl. Inst. 2019, 356, 5611–5629. [Google Scholar] [CrossRef]
- Sahu, R.; Gorripotu, T.; Panda, S. A hybrid DE-PS algorithm for load frequency control under deregulated power system with UPFC and RFB. Ain Shams Eng. J. 2015, 6, 893–911. [Google Scholar] [CrossRef] [Green Version]
- Daraz, A.; Malik, S.A.; Mokhlis, H.; Haq, I.U.; Zafar, F.; Mansor, N.N. Improved-fitness dependent optimizer based foi-pd controller for automatic generation control of multi-source interconnected power system in deregulated environment. IEEE Access 2020, 8, 197757–197775. [Google Scholar] [CrossRef]
- Ali, T.; Malik, S.A.; Daraz, A.; Aslam, S.; Alkhalifah, T. Dandelion Optimizer-Based Combined Automatic Voltage Regulation and Load Frequency Control in a Multi-Area, Multi-Source Interconnected Power System with Nonlinearities. Energies 2022, 15, 8499. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Hussein, M.E.; Banakhr, F.A.; Kamel, S. An Efficient Control Strategy for Enhancing Frequency Stability of Multi-Area Power System Considering High Wind Energy Penetration. IEEE Access 2020, 8, 140062–140078. [Google Scholar] [CrossRef]
- Tasnin, W.; Saikia, L.C.; Raju, M. Deregulated AGC of multi-area system incorporating dish-Stirling solar thermal and geothermalpower plants using fractional order cascade controller. Int. J. Electr. Power Energy Syst. 2018, 101, 60–74. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Ahmed, E.M.; Elmelegi, A.; Aly, M.; Elbaksawi, O.; Mohamed, A.-A.A. An optimized hybrid fractional order controller for frequency regulation in multi-area power systems. IEEE Access 2020, 8, 213899–213915. [Google Scholar] [CrossRef]
- Elmelegi, A.; Mohamed, E.A.; Aly, M.; Ahmed, E.M.; Mohamed, A.-A.; Elbaksawi, O. Optimized tilt fractional order cooperative controllers for preserving frequency stability in renewable energy-based power systems. IEEE Access 2021, 9, 8261–8277. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Gains | Case 1 | Case 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| MFOPID (FA) | MFOPID (SCA) | MFOPID (FDO) | MFOPID (JSO) | MFOPID (JSO) | FOPID (JSO) | PID (JSO) | PI (JSO) | |
| Kp1 | 1.543 | 1.903 | 0.998 | 1.340 | 1.101 | 0.789 | 1.234 | 1.230 |
| Ki1 | 0.910 | 1.234 | 1.010 | 1.543 | 0.002 | 1.020 | 1.987 | 1.110 |
| Kd1 | 1.023 | 1.678 | 1.900 | 0.220 | 0.010 | 0.789 | 0.303 | |
| λ1 | 0.789 | 0.006 | 0.100 | 0.223 | 0.090 | 0.765 | ||
| μ1 | 0.675 | 0.124 | 0.165 | 0.972 | 0.002 | 0.013 | ||
| KP2 | 0.032 | 1.011 | 1.810 | 0.011 | 1.009 | 0.303 | 0.300 | 1.009 |
| Ki2 | 0.024 | 1.304 | 1.020 | 0.991 | 1.199 | 1.109 | 0.340 | 1.199 |
| Kd2 | 0.100 | 1.008 | 1.200 | 0.910 | −1.560 | 1.001 | 1.090 | |
| λ2 | 0.165 | 0.165 | 0.010 | 0.165 | 0.059 | 0.090 | ||
| μ2 | 0.003 | 0.003 | 0.090 | 0.013 | 0.564 | 0.002 | ||
| Controller with Algorithms | Settling Time (Ts) | Overshoot (Osh) | Undershoot (Ush) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ∆F1 | ∆F2 | ∆Ptie | ∆F1 | ∆F2 | ∆Ptie | ∆F1 | ∆F2 | ∆Ptie | |
| MFOPID: JSO | 13.1 | 4.42 | 9.81 | 0.000240 | 0.000017 | 0.000378 | −0.00448 | −0.00094 | −0.00199 |
| MFOPID: FDO | 15.9 | 5.02 | 9.83 | 0.000126 | 0.000082 | 0.000651 | −0.00088 | −0.00135 | −0.00507 |
| MFOPID: SCA | 14.8 | 6.53 | 12.7 | 0.000424 | 0.000363 | 0.000542 | −0.00178 | −0.00664 | −0.00162 |
| MFOPID: FA | 14.7 | 8.43 | 9.99 | 0.000548 | 0.000813 | 0.001236 | −0.00156 | −0.00922 | −0.01012 |
| hTLBO-PS: TID [22] | 13.75 | 9.53 | 10.36 | 0.070400 | 0.007222 | 0.003500 | −0.24010 | −0.18888 | −0.06330 |
| hDE-PS: MID [43] | 18.09 | 19.07 | 12.69 | 0.001700 | 0.000800 | 0.000600 | −0.01500 | −0.00100 | −0.00800 |
| Techniques | Settling Time (Ts) | Overshoot (Osh) | Undershoot (Ush) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ∆F1 | ∆F2 | ∆Ptie | ∆F1 | ∆F2 | ∆Ptie | ∆F1 | ∆F2 | ∆Ptie | |
| MFOPID: JSO | 10.9 | 6.23 | 8.23 | 0.000044 | 0.000041 | 0.000272 | −0.00061 | −0.00628 | −0.00178 |
| FOPID: JSO | 11.1 | 7.93 | 8.46 | 0.000174 | 0.000048 | 0.000509 | −0.00056 | −0.00104 | −0.00500 |
| PID: JSO | 11.0 | 8.61 | 9.02 | 0.000153 | 0.000406 | 0.003254 | −0.00062 | −0.00179 | −0.00651 |
| PI: JSO | 12.2 | 10.9 | 10.4 | 0.000409 | 0.000813 | 0.006035 | −0.00105 | −0.00922 | −0.01376 |
| Parameters | % Variation | Settling Time (Ts) | Overshoot (Osh) | Undershoot (Ush) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ∆F1 | ∆F2 | ∆Ptie | ∆F1 | ∆F2 | ∆Ptie | ∆F1 | ∆F2 | ∆Ptie | ||
| Tg | +40 −40 | 6.38 8.01 | 6.78 7.90 | 12.72 12.73 | 0.00068 0.00047 | 0.00064 0.00054 | 0.000323 0.000276 | −0.00240 −0.00236 | −0.00610 −0.00600 | −0.00315 −0.00313 |
| R | +40 −40 | 6.38 8.03 | 6.74 7.91 | 13.01 13.03 | 0.00037 0.00030 | 0.00094 0.00098 | 0.000296 0.000289 | −0.00713 −0.00913 | −0.00693 −0.00678 | −0.00489 −0.00482 |
| Trh | +40 −40 | 6.10 7.80 | 6.14 8.10 | 12.80 12.79 | 0.00014 0.00017 | 0.00083 0.00075 | 0.000310 0.000311 | −0.00780 −0.00740 | −0.00731 −0.00725 | −0.00361 −0.00361 |
| T12 | +40 −40 | 6.09 7.82 | 6.17 8.10 | 13.10 13.08 | 0.00032 0.00031 | 0.00063 0.00061 | 0.000315 0.000316 | −0.00830 −0.00840 | −0.00623 −0.00618 | −0.00251 −0.00257 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Daraz, A.; Malik, S.A.; Basit, A.; Aslam, S.; Zhang, G. Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy Sources. Fractal Fract. 2023, 7, 89. https://doi.org/10.3390/fractalfract7010089
Daraz A, Malik SA, Basit A, Aslam S, Zhang G. Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy Sources. Fractal and Fractional. 2023; 7(1):89. https://doi.org/10.3390/fractalfract7010089
Chicago/Turabian StyleDaraz, Amil, Suheel Abdullah Malik, Abdul Basit, Sheraz Aslam, and Guoqiang Zhang. 2023. "Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy Sources" Fractal and Fractional 7, no. 1: 89. https://doi.org/10.3390/fractalfract7010089