
New Results on



Department of Mathematics, College of Science, University of Al-Qadisiyah, Diwaniyah 58002, Iraq
*
Author to whom correspondence should be addressed.
Fractal Fract. 2024, 8(3), 165; https://doi.org/10.3390/fractalfract8030165
Submission received: 30 January 2024
/
Revised: 26 February 2024
/
Accepted: 26 February 2024
/
Published: 13 March 2024
(This article belongs to the Section General Mathematics, Analysis)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper introduces fractional operators in the complex domain as generalizations for the Srivastava–Owa operators. Some properties for the above operators are also provided. We discuss the convexity and starlikeness of the generalized Libera integral operator. A condition for the convexity and starlikeness of the solutions of fractional differential equations is provided. Finally, a fractional differential equation is converted into an ordinary differential equation by wave transformation; illustrative examples are provided to clarify the solution within the complex domain.
1. Introduction and Definitions
Fractional calculus theory has found interesting applications in analytic function theory. The standard definitions of fractional operators and their extensions have been effectively utilized to derive various results, such as characterization properties, coefficient estimates [1], and distortion inequalities [2].
The complex modeling of phenomena in nature and society has recently been the object of several investigations based on methods initially developed in a physical context. These systems are the consequence of the ability of individuals to develop strategies. They occur in complex dynamical systems [3], kinetic theory [4], and hyperchaotic complex systems [5]. Fractional differential equations concerning the Riemann-Liouville fractional operators or the Caputo derivative have been recommended by many authors (see [6,7,8,9,10,11]).
In Section 1, we introduce generalizations for the Srivastava-Owa fractional operators. The conditions for the boundedness of the fractional integral operator in Bergman space are provided. Additionally, certain features are also given for these operators. In Section 2, we generalize the Libera integral operator [12], and we discuss the convexity and starlikeness for this operator. Additionally, results are presented for some fractional differential equations that have convex (starlike) solutions. In Section 3, the generalization of the wave transformation is introduced. This transformation converts differential equations in the complex domain from fractional into ordinary, with illustrative examples.
In [13], Srivastava and Owa presented the definitions of fractional operators in the complex domain as follows:
Definition 1.
The fractional integral of order is given for an analytic functionin a simple connected region of a complex plane by
Definition 2.
The fractional derivative of order is defined for an analytic function in a simple connected region of a complex plane as
Remark 1.
From Definitions 1 and 2, we have the following:
- (1)
- .
- (2)
- .
We recall some definitions that can be found in [14]. Let denote the class of analytic functions in the open unit disk . For and , let
Let the class be defined as follows:
The subclass of consists of univalent functions (the functions that are one-to-one and analytic in ). A function is said to be starlike (convex, resp.) of order (where ) if it satisfies (, resp.).
2. -Riemann–Liouville Fractional Operators
Definition 3.
For , the -gamma function is defined as follows (see Figure 1):
Remark 2.
In the above definition, the following hold:
Proposition 1.
Suppose and in with . Then, the following hold:
- (1)
- .
- (2)
- .
- (3)
- .
- (4)
- .
Proof.
From the above definition and direct calculations. □
In the following definitions and results, we present fractional operators in terms of the gamma function.
Definition 4.
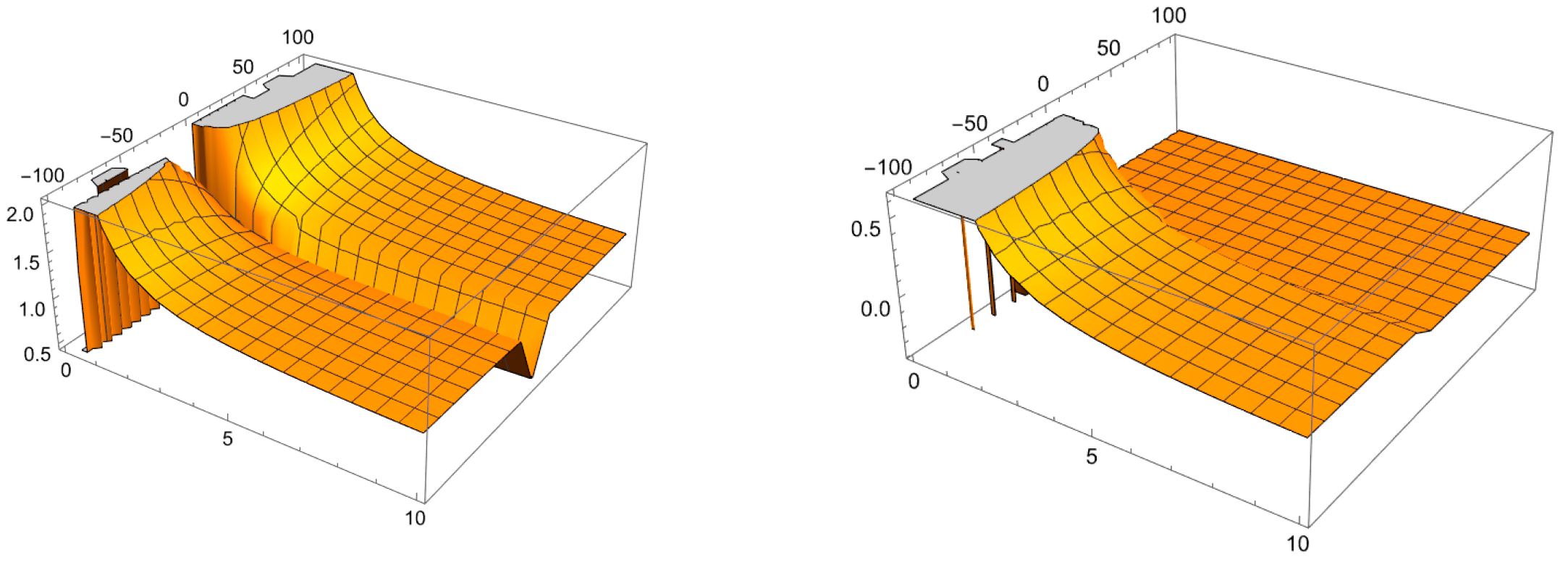
Let be a continuous function in . Then, the -Riemann-Liouville fractional integral is defined as follows (see Figure 2):
Figure 2.
Plots of , , , and .


Definition 5.
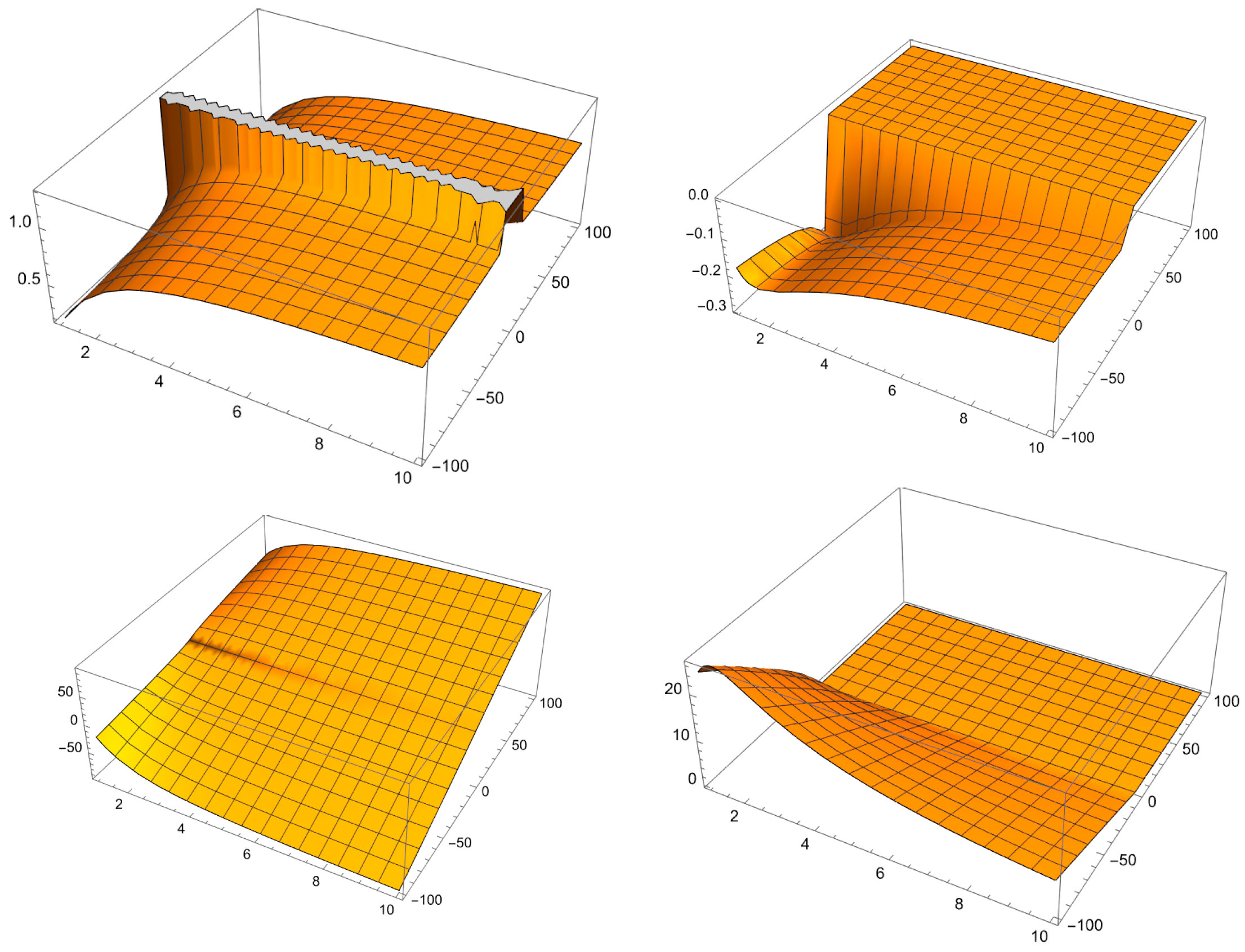
Let and . Then, the -Riemann-Liouville fractional derivative is defined as follows (see Figure 3):
Figure 3.
Plots of , , , and .

Remark 3.
In Definitions 4 and 5, the following hold:
Proposition 2.
For , the following statements hold:
- (1)
- .
- (2)
- and are linear operators.
- (3)
- (4)
- (5)
- (6)
- If is analytic, then .
- (7)
- If and , then
- (8)
- .
- (9)
- If , , and , then
- (10)
- If , , and , then
Proof.
- (1)
- (by Dirichlet equality).Substituting into the above integration yields
- (2)
- Clear.
- (3)
- Set ; then, and, hence,
- (4)
- Set ; then, , yielding
- (5)
- Follows from (3) and (4).
- (6)
- Follows from (5).
- (7)
- If , thenIf , then
- (8)
- (9)
- (10)
□
Example 1.
Consider the fractional differential equation with ; then,
Additionally,
Consequently,
Therefore,
Recall that for the Bergman space is the class of all analytic functions in with , where the norm is defined by
where denotes the Lebesgue area measure. In the following theorem, it is shown that the integral operator is bounded in .
Theorem 1.
Let and . Then, is bounded in and
where
Proof.
Assume that . Then,
where . □
Definition 6.
Let . Then, the -Caputo derivative is defined by
Theorem 2.
Let , and be an analytic function. Then,
Proof.
We have
where
Thus,
□
3. Convexity and Starlikeness
In this section, we generalize the Libera integral operator (see [12]) using an operator of the form
or, equivalently,
Recall that the class of admissible functions consists of those functions that satisfy the admissibility condition (see [17]):
Theorem 3
([17]). Let . If and , then .
Theorem 4.
Let and
Then, is a starlike function.
Proof.
Let . Then, is analytic and . Hence,
This implies that
Consequently,
We then obtain
which leads to . The admissibility condition is satisfied as follows:
Thus, and is starlike. □
Corollary 1.
Let and . If is a starlike function. Then is also a starlike function.
Theorem 5.
Let and . Suppose that
Then, is a convex function.
Proof.
Let . Then, is analytic and . Hence,
Consequently,
After a simple calculation,
which leads to . The admissibility condition is satisfied as follows:
Thus, and is convex. □
Corollary 2.
Let and . If is a convex function. Then is also a convex function.
The following results give some fractional differential equations with convex or starlike solutions.
Theorem 6
([17]). Let , , and , where , . If , then .
Theorem 7.
Let be analytic in with . If is the unique solution to the problem
then is a convex univalent solution in .
Proof.
By applying Proposition 2 (10),
By (11) and (12), we have
Now, let . Then, is analytic and , so
Thus, , so Theorem 6 leads to ; that is, . After simple calculations, . Hence, is convex. □
Theorem 8.
Let be analytic in with . If is the unique solution of the problem
then is a convex univalent solution.
Proof.
By applying Proposition 2 (10),
By (12), (13) and (14), we have
Let . Then, is analytic and , so
Thus, , so Theorem 6 leads to ; that is, . After simple calculations, . Hence, is convex. □
Theorem 9.
Let be analytic in with . If is the unique solution of the problem
thenis a univalent starlike solution.
Proof.
By the same proof technique as for Theorems 7 and 8. □
4. Fractional Complex Transform
Recently, a significant and highly beneficial technique for fractional calculus, known as the fractional complex transform, was introduced in a publication [18,19,20,21,22]. This section illustrates some fractional complex transforms using the
-Riemann–Liouville fractional operator. Analogous to the wave transformation
where and are constants,
is applied to fractional differential equations in the sense of -fractional operators.
We impose the fractional complex transform
where is the fractional index.
Example 2.
Let and . Then,
On the other hand,
Therefore,
In particular, if , we have
Example 3.
Consider the following equation:
.
Assume that
is a formal solution, when and . After direct calculations,
and
yielding
Equivalently,
where . Clearly, is a contraction function whenever ; then, (22) has a unique solution in .
To calculate the fractional index for the equation
we assume that the transform and the solution can be expressed as
By substituting (24) into (23), we obtain
Hence,
By induction,
Therefore,
Hence,
Assume that
Therefore,
yielding
Therefore,
where is the Mittag-Leffler function. Thus, (25) is the exact solution of (20), so the approxi-mate solution of (23) is given by
In the following, we discuss equations of the form
with , where
and are analytic functions.
In functional analysis, recall that the norm on analytic functions is defined by where is the Banach space of analytic functions in .
Theorem 10
(Existence and Uniqueness).
Consider the problem in (26) with , and let satisfy
and
Then, there exists a unique solution .
Proof.
Define and the operator by
Firstly, we prove that is bounded.
Since , then is bounded.
Now, we prove that
is continuous. Since
is continuous on , it is uniformly continuous on compact set , where
. Therefore, given
, there exists
such that for all
, we have
for . Then,
Thus, φ is continuous.
Now, we show that φ is an equicontinuous function on . For such that , for all , we obtain
which is independent on u. Therefore, φ is a function that exhibits equicontinuity on . The Arzela–Ascoli Theorem implies that any sequence of functions from contains a subsequence that converges uniformly. Consequently, is relatively compact. Schander’s fixed point theorem states that φ possesses a fixed point. A fixed point of φ is a solution that is obtained by construction.
Finally, we need to prove that φ has a unique fixed point.
The above follows from
and . Thus, by φ contraction mapping and by the Banach fixed point theorem, φ has a unique fixed point corresponding to the solution. □
Example 4.
Consider the following problem:
where (puncture unit disk). Let with solution . By substituting into (28) and applying (18), we obtain , yielding
By induction for m and , we have
Therefore,
Author Contributions
Conceptualization A.S.T., methodology W.G.A., validation W.G.A., formal analysis W.G.A., investigation A.S.T. and W.G.A., resources W.G.A. and A.S.T., writing—original draft preparation A.S.T., writing—review and editing W.G.A., visualization A.S.T., project administration W.G.A., funding acquisition W.G.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Darus, M.; Ibrahim, R.W. Radius estimates of a subclass of univalent functions. Mat. Vesn. 2011, 63, 55–58. [Google Scholar]
- Srivastava, H.M.; Ling, Y.; Bao, G. Some distortion inequalities associated with the fractional derivatives of analytic and univalent functions. J. Inequalities Pure Appl. Math. 2001, 2, 1–6. [Google Scholar]
- Mahmoud, G.M.; Mahmoud, E.E. Modified projective lag synchronization of two nonidentical hyperchaotic complex nonlinear systems. Int. J. Bifurc. Chaos 2011, 21, 2369–2379. [Google Scholar] [CrossRef]
- Bianca, C. Onset of nonlinearity in thermostatted active particles models for complex systems. Nonlinear Anal. Real World Appl. 2012, 13, 2593–2608. [Google Scholar] [CrossRef]
- Díaz, R.; Pariguan, E. On hypergeometric functions and Pochhammer k-symbol. Divulg. Mat. 2007, 15, 179–192. [Google Scholar]
- Baleanu, D.; Güvenç, Z.B.; Machado, J.A.T. New Trends in Nanotechnology and Fractional Calculus Applications; Springer: Berlin/Heidelberg, Germany, 2010; Volume 10. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1999; Volume 198. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, J.A.T. Advances in Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4. [Google Scholar]
- Libera, R.J. Some classes of regular univalent functions. In Proceedings of the American Mathematical Society; American Mathematical Society: Providence, RI, USA, 1965; pp. 755–758. [Google Scholar]
- Srivastava, H.M.; Owa, S. Univalent Functions, Fractional Calculus, and Their Applications; Wiley: New York, NY, USA, 1989. [Google Scholar]
- Loc, T.G.; Tai, T.D. The generalized gamma functions. ACTA Math. Vietnam. 2011, 37, 219–230. [Google Scholar]
- Ibrahim, R.W. Fractional complex transforms for fractional differential equations. Adv. Differ. Equ. 2012, 2012, 192. [Google Scholar] [CrossRef]
- Aldawish, I.; Ibrahim, R.W. Studies on a new K-symbol analytic functions generated by a modified K-symbol Riemann-Liouville fractional calculus. MethodsX 2023, 11, 102398. [Google Scholar] [CrossRef] [PubMed]
- Miller, K.S.; Mocanu, P.T. Differential Subordinations: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- He, J.H.; Li, Z.B. Application of the fractional complex transform to fractional differential equations. Nonlinear Sci. Lett. Math. Phys. Mech. 2011, 2, 121–126. [Google Scholar]
- He, J.-H.; Elagan, S.K.; Li, Z.B. Geometrical explanation of the fractional complex transform and derivative chain rule for fractional calculus. Phys. Lett. A 2012, 376, 257–259. [Google Scholar] [CrossRef]
- Li, Z.-B.; He, J.-H. Fractional complex transform for fractional differential equations. Math. Comput. Appl. 2010, 15, 970–973. [Google Scholar] [CrossRef]
- Li, Z.-B. An extended fractional complex transform. Int. J. Nonlinear Sci. Numer. Simul. 2010, 11, 335–338. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Mahmoud, E.E.; Ahmed, M.E. On the hyperchaotic complex Lü system. Nonlinear Dyn. 2009, 58, 725–738. [Google Scholar] [CrossRef]
Figure 1.
Plots of , , and .

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tayyah, A.S.; Atshan, W.G.
New Results on
AMA Style
Tayyah AS, Atshan WG.
New Results on
Tayyah, Adel Salim, and Waggas Galib Atshan.
2024. "New Results on