
Solitary and Periodic Wave Solutions of Fractional Zoomeron Equation
 , , ,
, , ,
Abstract
:1. Introduction
2. Methodology
- (i)
- ).
- (ii)
- ).
- (iii)
- .
3. Execution of the Problem
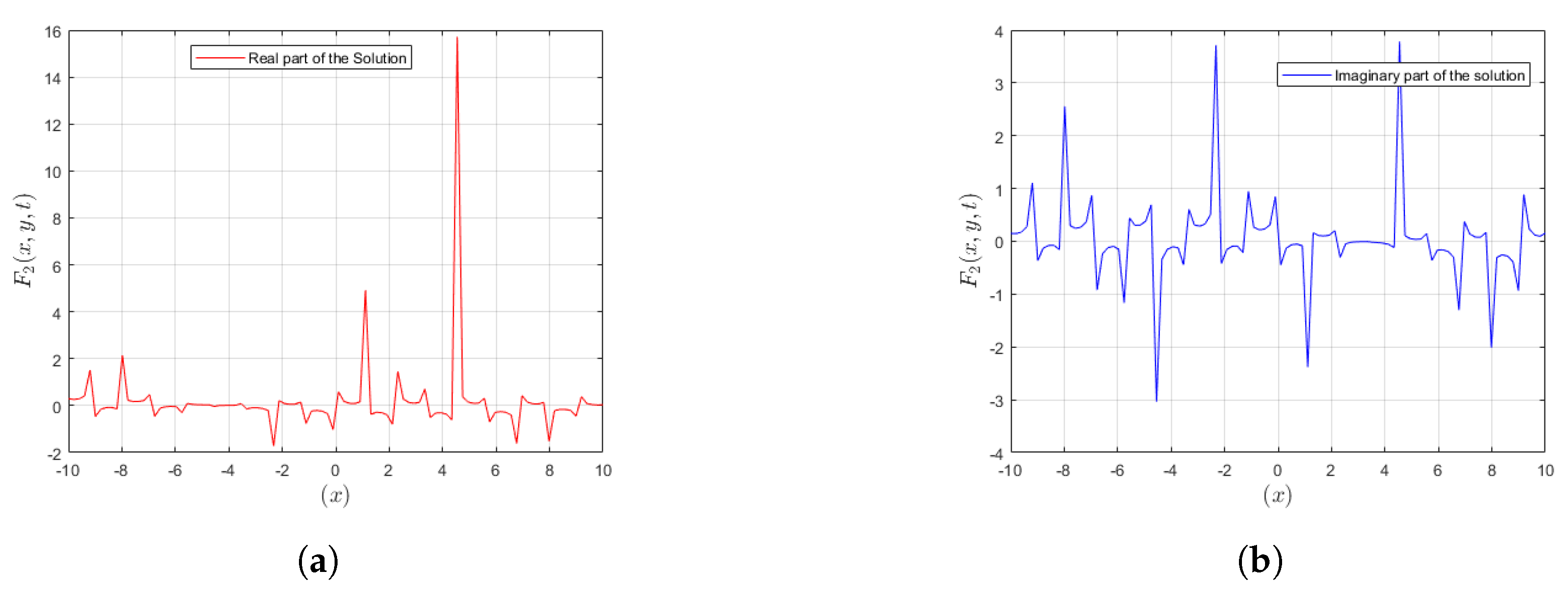
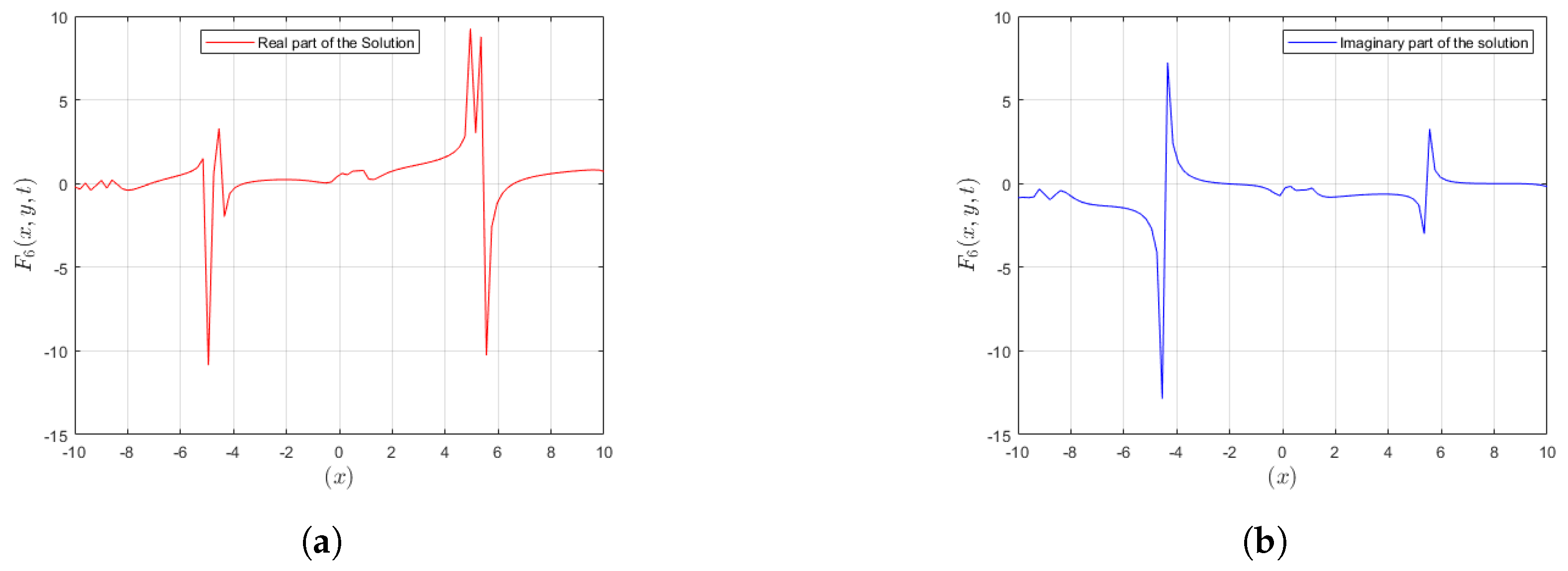
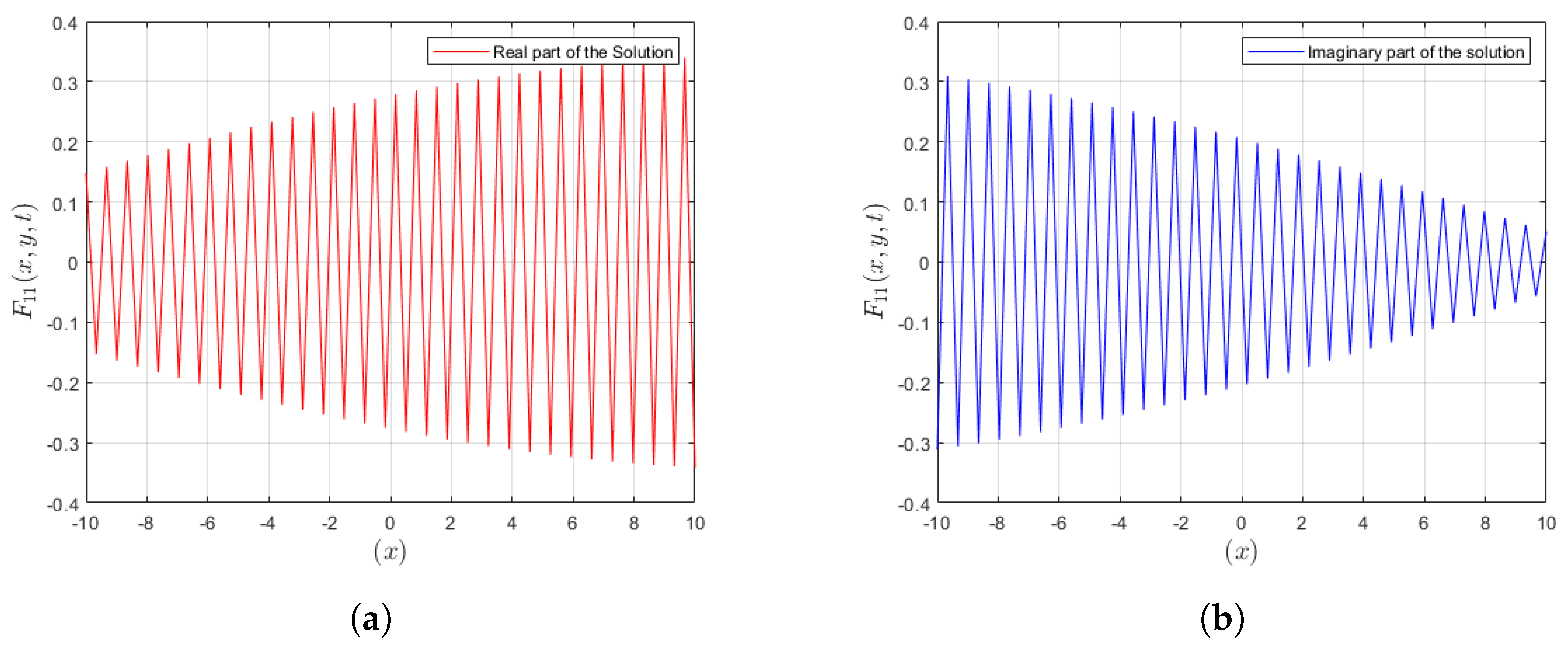
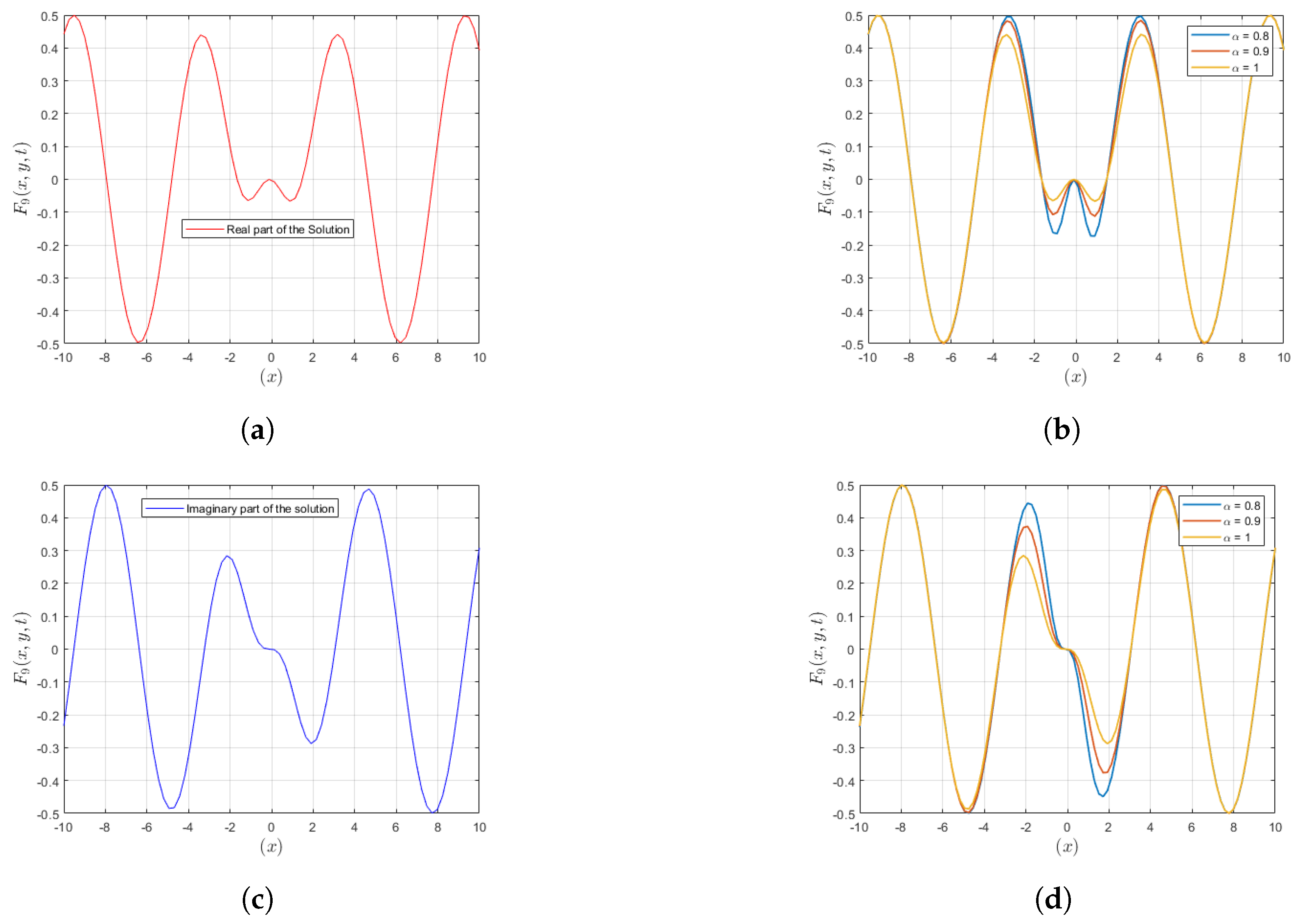
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ullah, M.S.; Ali, M.Z.; Roshid, H.O.; Seadawy, A.R.; Baleanu, D. Collision phenomena among lump, periodic and soliton solutions to a (2+1)-dimensional Bogoyavlenskiis breaking soliton model. Phys. Lett. A 2021, 397, 127263. [Google Scholar] [CrossRef]
- Triki, H.; Pan, A.; Zhou, Q. Pure-quartic solitons in presence of weak nonlocality. Phys. Lett. A 2023, 459, 128608. [Google Scholar] [CrossRef]
- Yang, J.; Liang, S.; Zhang, Y. Travelling waves of a delayed SIR epidemic model with nonlinear incidence rate and spatial diffusion. PLoS ONE 2011, 6, e21128. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.Q.; Zhao, X.H. Resonant solitons of the B-type Kadomtsev-Petviashvili equation. Phys. Lett. A 2023, 458, 128592. [Google Scholar] [CrossRef]
- Zhong, W.P.; Yang, Z.; Belic, M.; Zhong, W.Y. Controllable optical rogue waves in inhomogeneous media. Phys. Lett. A 2022, 453, 128469. [Google Scholar] [CrossRef]
- Zarmi, Y. Sine-Gordon equation in (1+2) and (1+3) dimensions: Existence and classification of traveling-wave solutions. PLoS ONE 2015, 10, e0124306. [Google Scholar] [CrossRef] [PubMed]
- Tian, S.F.; Wang, X.F.; Zang, T.T.; Qiu, W.H. Stability analysis, solitary wave and explicit power series solutions of a (2 + 1)-dimensional nonlinear Schrodinger equation in a multicomponent plasma. Int. J. Numer. Methods Heat Fluid Flow 2021, 3, 1732–1748. [Google Scholar] [CrossRef]
- Manafian, J. Optical soliton solutions for Schrodinger type nonlinear evolution equations by the tan(Θ/2)-expansion method. Optik 2016, 127, 4222–4245. [Google Scholar] [CrossRef]
- Ullah, M.S.; Ahmed, O.; Mahbub, M.A. Collision phenomena between lump and kink wave solutions to a (3+1)-dimensional Jimbo-Miwa-like model. Partial. Differ. Equ. Appl. Math. 2022, 5, 100324. [Google Scholar] [CrossRef]
- Ullah, M.S.; Roshid, H.O.; Ali, M.Z.; Noor, N.F.M. Novel dynamics of wave solutions for Cahn-Allen and diffusive predator-prey models using MSE scheme. Partial. Differ. Equ. Appl. Math. 2021, 3, 100017. [Google Scholar] [CrossRef]
- Nandi, D.C.; Ullah, M.S.; Roshid, H.O.; Ali, M.Z. Application of the unified method to solve the ion sound and Langmuir waves model. Heliyon 2022, 8, e10924. [Google Scholar] [CrossRef]
- Yang, J.J.; Tian, S.F.; Li, Z.Q. Riemann-Hilbert problem for the focusing nonlinear Schrodinger equation with multiple high-order poles under nonzero boundary conditions. Phys. D Nonlinear Phenom. 2022, 432, 133162. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Probing families of optical soliton solutions in fractional perturbed Radhakrishnan Kundu Lakshmanan model with improved versions of extended direct algebraic method. Fractal Fract. 2023, 7, 512. [Google Scholar] [CrossRef]
- Qin, Y.; Khan, A.; Ali, I.; Al Qurashi, M.; Khan, H.; Baleanu, D. An efficient analytical approach for the solution of certain fractional-order dynamical systems. Energies 2020, 13, 2725. [Google Scholar] [CrossRef]
- Saad Alshehry, A.; Imran, M.; Khan, A.; Weera, W. Fractional view analysis of Kuramoto Sivashinsky equations with non-singular kernel operators. Symmetry 2022, 14, 1463. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Khan, H.; Arif, M. Some analytical and numerical investigation of a family of fractional-order Helmholtz equations in two space dimensions. Math. Methods Appl. Sci. 2020, 43, 199–212. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Investigating symmetric soliton solutions for the fractional coupled konno onno system using improved versions of a novel analytical technique. Mathematics 2023, 11, 2686. [Google Scholar] [CrossRef]
- Irshad, A.; Mohyud-Din, S.T. The solitary wave solutions of Zoomeron equation. WJST 2013, 10, 201–208. [Google Scholar]
- Baskonus, H.M.; Sulaiman, T.A.; Bulut, H. New solitary wave solutions to the (2+1)-dimensional Calogero-Bogoyavlenskii-Schiff and the Kadomtsev-Petviashvili hierarchy equations. Indian J. Phys. 2017, 91, 1237–1243. [Google Scholar] [CrossRef]
- Rizvi, S.T.R.; Seadawy, A.R.; Ashraf, F.; Younis, M.; Iqbal, H.; Baleanu, D. Lump and Interaction solutions of a geophysical Korteweg-de Vries equation. Results Phys. 2020, 19, 103661. [Google Scholar] [CrossRef]
- Fan, E.G.; Zhang, J.; Hon, B.Y. A new complex line soliton for the two-dimensional KdV-Burgers equation. Phys. Lett. A 2001, 291, 376–380. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, S.; Dong, H. Hybrid solutions of (3 + 1)-dimensional Jimbo-Miwa equation. Math. Probl. Eng. 2017, 2017, 5453941. [Google Scholar] [CrossRef]
- Sahoo, S.; Ray, S.S. New Travelling Wave and Anti-Kink Wave Solutions of Space-Time Fractional (3 + 1)-Dimensional Jimbo-Miwa Equation. Chin. J. Phys. 2020, 67, 79–85. [Google Scholar] [CrossRef]
- Yokus, A.; Durur, H.; Ahmad, H.; Thounthong, P.; Zhang, Y.-F. Construction of Exact Traveling Wave Solutions of the Bogoyavlenskii Equation by (G/G,1/G)-Expansion and (1/G)-Expansion Techniques. Results Phys. 2020, 19, 103409. [Google Scholar] [CrossRef]
- Arshed, S. New Soliton Solutions to the Perturbed Nonlinear Schrodinger Equation by exp(−ϕ)-Expansion method. Optik 2020, 220, 165123. [Google Scholar] [CrossRef]
- Yldrm, Y. Optical Solitons with Biswas-Arshed Equation by F-Expansion Method. Optik 2021, 227, 165788. [Google Scholar] [CrossRef]
- Akbar, M.A.; Akinyemi, L.; Yao, S.W.; Jhangeer, A.; Rezazadeh, H.; Khater, M.M.; Ahmad, H.; Inc, M. Soliton Solutions to the Boussinesq Equation through Sine-Gordon Method and Kudryashov Method. Results Phys. 2021, 25, 104228. [Google Scholar] [CrossRef]
- Al-Sawalha, M.M.; Khan, A.; Ababneh, O.Y.; Botmart, T. Fractional view analysis of Kersten-Krasilshchik coupled KdV-mKdV systems with non-singular kernel derivatives. AIMS Math. 2022, 7, 18334–18359. [Google Scholar] [CrossRef]
- Alderremy, A.A.; Iqbal, N.; Aly, S.; Nonlaopon, K. Fractional series solution construction for nonlinear fractional reaction-diffusion Brusselator model utilizing Laplace residual power series. Symmetry 2022, 14, 1944. [Google Scholar] [CrossRef]
- Alshammari, S.; Al-Sawalha, M.M.; Shah, R. Approximate analytical methods for a fractional-order nonlinear system of Jaulent Miodek equation with energy-dependent Schrdinger potential. Fractal Fract. 2023, 7, 140. [Google Scholar] [CrossRef]
- Shah, R.; Alkhezi, Y.; Alhamad, K. An analytical approach to solve the fractional Benney equation using the q-homotopy analysis transform method. Symmetry 2023, 15, 669. [Google Scholar] [CrossRef]
- Al-Sawalha, M.M.; Ababneh, O.Y.; Shah, N.A.; Nonlaopon, K. Combination of Laplace transform and residual power series techniques of special fractional-order non-linear partial differential equations. AIMS Math. 2023, 8, 5266–5280. [Google Scholar] [CrossRef]
- Miura, M.R. Backlund Transformation; Springer: Berlin/Heidelberg, Germany, 1978. [Google Scholar]
- Younis, M.; Rizvi, S.T.R. Dispersive dark optical soliton in (2 + 1)-dimensions by (G′/G)-expansion with dual-power law nonlinearity. Optik 2015, 126, 5812–5814. [Google Scholar] [CrossRef]
- Degasperis, A.; Rogers, C.; Schief, W.K. Isothermic surfaces generated via Backlund and Moutard Transformations, Boomeron and Zoomeron connections. Stud. Appl. Math. 2002, 109, 39–65. [Google Scholar] [CrossRef]
- Abazari, R. The solitary wave solutions of Zoomeron equation. Appl. Math. Sci. 2011, 5, 2943–2949. [Google Scholar]
- Khan, K.; Akbar, A.M. Traveling wave solutions of the (2 + 1)-dimensional Zoomeron equation and the Burgers equations via the MSE method and the exp-function method. Ain Shams Eng. J. 2014, 5, 247–256. [Google Scholar] [CrossRef]
- Morris, M.R.; Leach, P.G.L. Symmetry reductions and solutions to the Zoomeron equation. Phys. Scr. 2014, 90, 15. [Google Scholar] [CrossRef]
- Kumar, D.; Kaplan, M. New analytical solutions of (2 + 1)-dimensional conformable time fractional Zoomeron equation via two distinct techniques. Chin. J. Phys. 2018, 56, 2173–2185. [Google Scholar] [CrossRef]
- Li, Z.; Han, T. Bifurcation and exact solutions for the (2 + 1)-dimensional conformable time-fractional Zoomeron equation. Adv. Differ. Equ. 2020, 2020, 656. [Google Scholar] [CrossRef]
- Demirbilek, U.; Ala, V.; Mamedov, K.R. Exact solutions of conformable time fractional Zoomeron equation via IBSEFM. Appl. Math. J. Chin. Univ. 2021, 36, 554–563. [Google Scholar] [CrossRef]
- Sarikaya, M.Z.; Budak, H.; Usta, H. On generalized the conformable fractional calculus. TWMS J. Appl. Eng. Math. 2019, 9, 792799. [Google Scholar]
- Abdelrahman, M.A.E.; Sohaly, M.A. Solitary waves for the modified Korteweg-de Vries equation in deterministic case and random case. J. Phys. Math. 2017, 8, 2090-0902. [Google Scholar]
- Abdelrahman, M.A.E.; Sohaly, M.A. Solitary waves for the nonlinear Schrdinger problem with the probability distribution function in the stochastic input case. Eur. Phys. J. Plus. 2017, 132, 339. [Google Scholar] [CrossRef]
- Yang, X.F.; Deng, Z.C.; Wei, Y. A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Diff. Equa. 2015, 1, 117–133. [Google Scholar] [CrossRef]
- Lu, D.; Shi, Q. New Jacobi elliptic functions solutions for the combined KdV-mKdV equation. Int. J. Nonlinear Sci. 2010, 10, 320–325. [Google Scholar]
- Zhang, Y. Solving STO and KD equations with modified Riemann–Liouville derivative using improved (G/G′)-expansion function method. Int. J. Appl. Math. 2015, 45, 16–22. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case I: Present method |
| Case I: -expansion method |
| Case I: Exp-function method |
| Case II: Present method |
| Case II: Exp-function method |
| where |
| Case III: Present method |
| Case III: , and -expansion method |
| Case I: Present method |
| Case I: MSE method |
| Case II: Present method |
| Case II: |
| . |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshammari, M.; Moaddy, K.; Naeem, M.; Alsheekhhussain, Z.; Alshammari, S.; Al-Sawalha, M.M. Solitary and Periodic Wave Solutions of Fractional Zoomeron Equation. Fractal Fract. 2024, 8, 222. https://doi.org/10.3390/fractalfract8040222
Alshammari M, Moaddy K, Naeem M, Alsheekhhussain Z, Alshammari S, Al-Sawalha MM. Solitary and Periodic Wave Solutions of Fractional Zoomeron Equation. Fractal and Fractional. 2024; 8(4):222. https://doi.org/10.3390/fractalfract8040222
Chicago/Turabian StyleAlshammari, Mohammad, Khaled Moaddy, Muhammad Naeem, Zainab Alsheekhhussain, Saleh Alshammari, and M. Mossa Al-Sawalha. 2024. "Solitary and Periodic Wave Solutions of Fractional Zoomeron Equation" Fractal and Fractional 8, no. 4: 222. https://doi.org/10.3390/fractalfract8040222
APA StyleAlshammari, M., Moaddy, K., Naeem, M., Alsheekhhussain, Z., Alshammari, S., & Al-Sawalha, M. M. (2024). Solitary and Periodic Wave Solutions of Fractional Zoomeron Equation. Fractal and Fractional, 8(4), 222. https://doi.org/10.3390/fractalfract8040222