Abstract
GNSS is widely used in professional athletic training as an outdoor location based services, and the indoor positioning technology has gradually flourished in the gymnasium. To keep up with the demand for athletic training in indoor and outdoor environment, integration of indoor and outdoor positioning technology can achieve a seamless indoor/outdoor position solution. The proposed method uses GPS/BEIDOU with IMU-MEMS technology for outdoor positioning and UWB with IMU-MEMS technology for indoor positioning to provide high precision positioning services. The experimental results show that the proposed method can achieve meter level position accuracy in outdoor environment and centimeter level position accuracy in indoor environment, it can provide precise and real-time positioning service for effective athletic training aid.
1. Introduction
Global Navigation Satellite System (GNSS) has been practically used for wide variety of sports, such as the measurement of distance, velocity, trajectory and so on. It can also be used in conjunction with accelerometer, heart rate meter and geographic information system to provide more detailed physical indicators for comprehensive analyzing [].
Nevertheless, location based service (LBS) of indoor sports cannot be carried out by GNSS because of the signal attenuation and multipath effect in the indoor environment []. Indoor localization technology has becme an effective way for indoor sports activities. The conventional indoor localization technology mainly includes the following: Wireless Fidelity (Wi-Fi), Visible light, Geomagnetic, Radio Frequency Identification (RFID), ZigBee, Ultrasonic, Bluetooth, Computer vision, Ultra Wideband (UWB), Strap-down Inertial Navigation System (SINS), Cellular network and Infrared.
To keep up with the demand for athletic training in indoor and outdoor environment, integration of indoor and outdoor positioning technology can achieve a seamless indoor/outdoor position solution [,,,,]. Drishti uses a precise position measurement system to guide blind users in indoor and outdoor environment []. But the adaptive positioning switching had not been implemented, the user switches the system from an outdoor to an indoor environment by a vocal command. The combination of GPS and WLAN for indoor and outdoor positioning was proposed [,], but the WLAN indoor localization technology has some shortcomings such as heavy workload of fingerprint collecting, susceptible to movement of Wi-Fi device and sensitive to multipath effect.
The proposed method uses Global Positioning System/BeiDou Navigation Satellite System (GPS/BEIDOU) with Inertial Measurement Unit—Micro Electro Mechanical System (IMU-MEMS) technology for outdoor positioning and Ultra Wideband (UWB) with IMU-MEMS technology for indoor positioning to provide high precision positioning services.
2. Methods
2.1. GNSS & IMU
Since the satellite is far away from earth and the channel environment is complex, GNSS receiver may lose lock to GNSS signal in some cases, such as occlusions, multipath effect, intentional or unintentional interference, high-dynamic, which will lead to a rapid reduction in positioning accuracy in a short time.
IMU can provide position, velocity and attitude of the carrier in any situation, because it is not affected by external electromagnetic signals. By using IMU based on MEMS technology can achieve LBS with low power consumption, low cost and compact size.
The GNSS/IMU navigation is superior to the single navigation strategy, this is mainly reflected in the following two points: (1) GNSS not only constrains the error characteristics of IMU over time, but also can estimate the error of the sensor on-line; (2) IMU can improve the reliability and integrity of LBS, that is to say, the GNSS/IMU navigation can skip the estimation of position and speed while GNSS receiver loses lock to GNSS signal.
The GNSS/IMU outdoor navigation program is shown in Figure 1. The GNSS/IMU outdoor navigation using loose integrated mode by feeding the measured value of IMU and GNSS such as position and velocity into Kalman filter for estimating and correcting the error [].
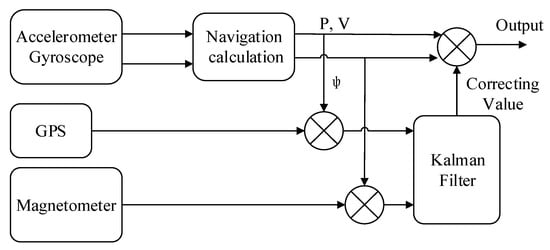
Figure 1.
GNSS/IMU Outdoor Navigation Program.
This GNSS/IMU outdoor navigation using loose integrated mode is simple and easy to implement. The module of GNSS and IMU are still running stand-alone, navigation information has a certain degree of redundancy.
2.2. UWB & IMU
The common indoor localization technology such as WI-FI, Bluetooth, with positioning accuracy reaching to meter grade, as shown in Table1, would no longer be sufficient for the indoor competition and training. UWB has a high precision ranging capability, can achieve centimeter level positioning accuracy. But there is non-line of sight signal transmission in the indoors. Using IMU’s trace tracking ability to make up for non-line of sight positioning, and achieve a full range of high-precision positioning [,].
The proposed indoor localization system is designed basing on a chip UWB transceiver as the estimate output of the true position, and a low cost Wearable MEMS-IMU sensor used for movement tracking. The high accuracy of the indoor localization is achieved by combining the mentioned two part. The UWB/IMU indoor navigation program is shown in Figure 2.
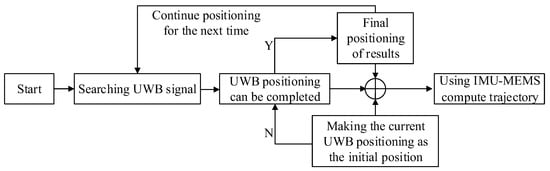
Figure 2.
UWB/IMU Indoor Navigation Program.
2.3. Adaptive Positioning Switching
The adaptive switching mode is defined as a switching mode that automatically initiates one positioning mode while closing other positioning modes according to different suitable ranges of indoor and outdoor positioning systems. The adaptive switching mode has the advantages of flexibility, high quality and low energy consumption.
In the location transition region, both of the outdoor and indoor positioning system are available. The adaptive positioning switching mode is to switch the outdoor and indoor positioning methods in the location transition region, as shown in Figure 3.
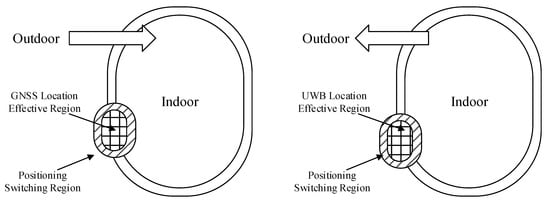
Figure 3.
Positioning Switching Region.
The basic process of the adaptive switching mode is as follows:
- (1)
- According to the boundary area of indoor and outdoor environment, the location transition region is set based on the coverage of two types of positioning signals in the overlap region.
- (2)
- By comparing the pre-set threshold value with the current calculation value, and combining the corresponding switching rules in the system, the adaptive switching of indoor and outdoor location is achieved.
2.4. System Design
The system judges the user is near or away from indoor region by monitoring the spatial relationship between the users and the gymnasium, and automatic switches positioning mode according to comparison results of the distance between the current coordinate position and entrance/enter position and the default threshold, as shown in Figure 4.
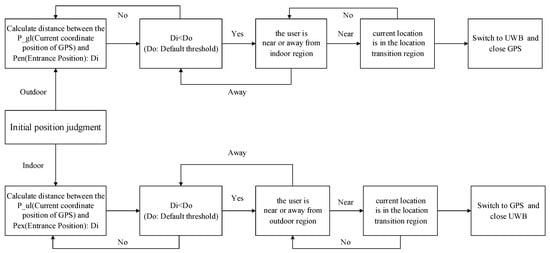
Figure 4.
Positioning Switching algorithm.
The proposed method uses GPS/BEIDOU with IMU-MEMS technology and UWB with IMU-MEMS technology for indoor and outdoor positioning. The architecture of the system is shown in Figure 5.
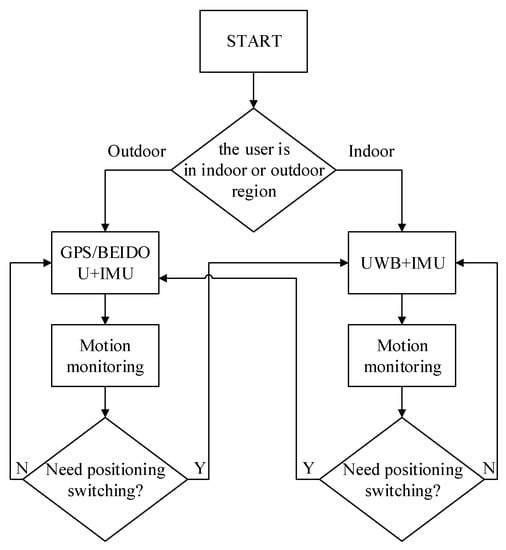
Figure 5.
The architecture of the system.
3. Results
The tests were performed around the indoor gymnasium in the ground track field of the State Sports General Administration Training Council apartment. The tester was walking or running from outdoor to indoor or from indoor to outdoor according to the test content while carrying the positioning equipment. The results are shown in the form of moving trail and location data output.
3.1. Outdoor Positioning Results
As shown in Figure 6, due to the weak stability of the GPS positioning signal, the outdoor positioning results will be a certain degree of deviation. The accuracy by using GPS and IMU method is less than 10 m.
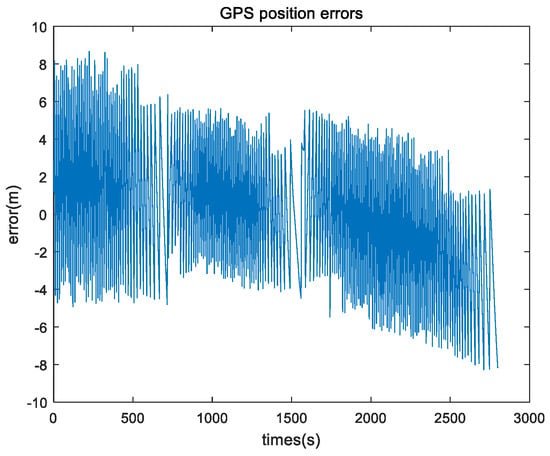
Figure 6.
Outdoor experimental tests by GPS + IMU method.
3.2. Indoor Positioning Results
The indoor positioning results are shown in Figure 7. The indoor positioning data is relatively stable because of the high positioning accuracy of UWB, and most of the trajectory is displayed according to the actual test route.
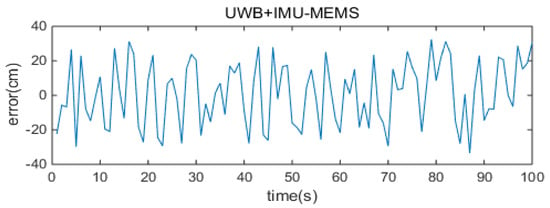
Figure 7.
Indoor experimental tests by UWB + IMU method.
3.3. Positioning Switching Results
We can see the positioning switching results from Figure 8, the adaptive positioning switching mode in location transition region can perform adaptive switching in some cases, but instability will occur due to the influence of external environment and other factors sometimes.
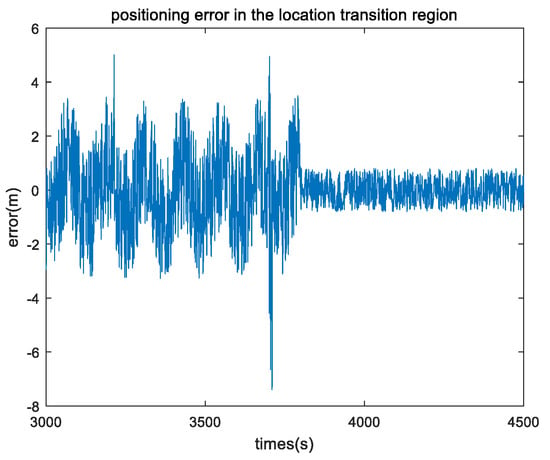
Figure 8.
Positioning switching results.
4. Conclusions
The effectiveness of the proposed integration of indoor and outdoor positioning method is demonstrated through the results.
The experimental results show that the proposed method can achieve meter level position accuracy in outdoor environment and centimeter level position accuracy in indoor environment, it can provide precise and real-time positioning service for effective athletic training aid. The adaptive positioning switching mode in location transition region can perform adaptive switching in some cases, but instability will occur due to the influence of external environment and other factors sometimes.
Due to the feature of high speed in the sport event, future research should investigate the real-time performance in the localization application. And improving the stability of the system in the location transition region is another important task in the future.
Acknowledgments
This research was supported under the Fundamental Research Funds for the China Institute of Sport Science, project number 16–50 and 17–48.
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Waegli, A.; Skaloud, J. Optimization of two GPS/MEMS-IMU integration strategies with application to sports. GPS Solut. 2009, 13, 315–326. [Google Scholar] [CrossRef]
- Hellmers, H.; Norrdine, A.; Blankenbach, J.; Eichhorn, A. An IMU/magnetometer-based Indoor positioning system using Kalman filtering. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–9. [Google Scholar]
- Ran, L.; Helal, S.; Moore, S. Drishti: An integrated indoor/outdoor blind navigation system and service. In Proceedings of the Second IEEE Annual Conference on Pervasive Computing and Communications, Orlando, FL, USA, 17 March 2004. [Google Scholar]
- Reyero, L.; Delisle, G. A pervasive indoor-outdoor positioning system. J. Netw. 2008, 3, 70–83. [Google Scholar] [CrossRef]
- Hansen, R.; Wind, R.; Jensen, C.S.; Thomsen, B. Seamless indoor/outdoor positioning handover for location—Based services in Streamspin. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009. [Google Scholar]
- Fernandez-Madrigal, J.A.; Cruz-Martin, E.; Gonzalez, J.; Galindo, C.; Blanco, J.L. Application of UWB and GPS technologies for vehicle localization in combined indoor-outdoor environments. In Proceedings of the 9th International Symposium on Signal Processing and Its Applications, Sharjah, United Arab Emiratesm, 12–15 February 2007. [Google Scholar]
- Kealy, A.; Roberts, G.; Retscher, G. Evaluating the performance of low cost MEMS inertial sensors for seamless indoor/outdoor navigation. In Proceedings of the 2010 IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010. [Google Scholar]
- Wang, Y.; Mangnus, J.; Kostic, D.; Nijmeijer, H.; Jansen, S.T.H. Vehicle state estimation using GPS/IMU integration. In Proceedings of the 2011 IEEE Sensors, Limerick, Ireland, 28–31 October 2011; pp. 1815–1818. [Google Scholar]
- Marquez, A.; Tank, B.; Meghani, S.K.; Ahmed, S.; Tepe, K. Accurate UWB and IMU based indoor localization for autonomous robots. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering, Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Yoon, P.K.; Zihajehzadeh, S.; Kang, B.; Park, E.J. Robust Biomechanical Model-based 3D Indoor Localization and Tracking Method Using UWB and IMU. IEEE Sens. J. 2017, 17, 1084–1096. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).