
U-Net Performance for Beach Wrack Segmentation: Effects of UAV Camera Bands, Height Measurements, and Spectral Indices


Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. UAV-Based Remote Sensing of BW
2.3. Machine Learning Methods
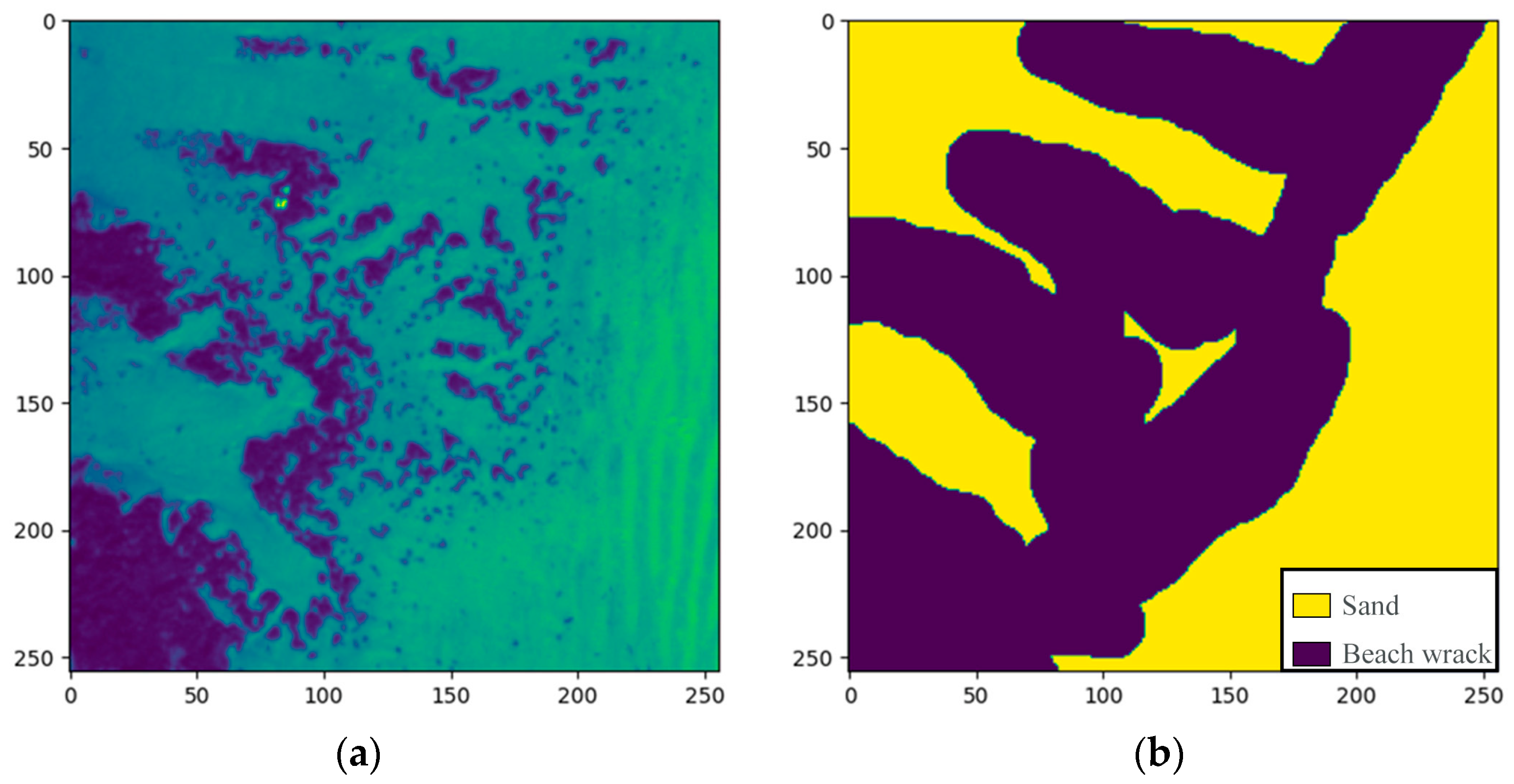
2.3.1. Labeling
2.3.2. Data Pre-Processing
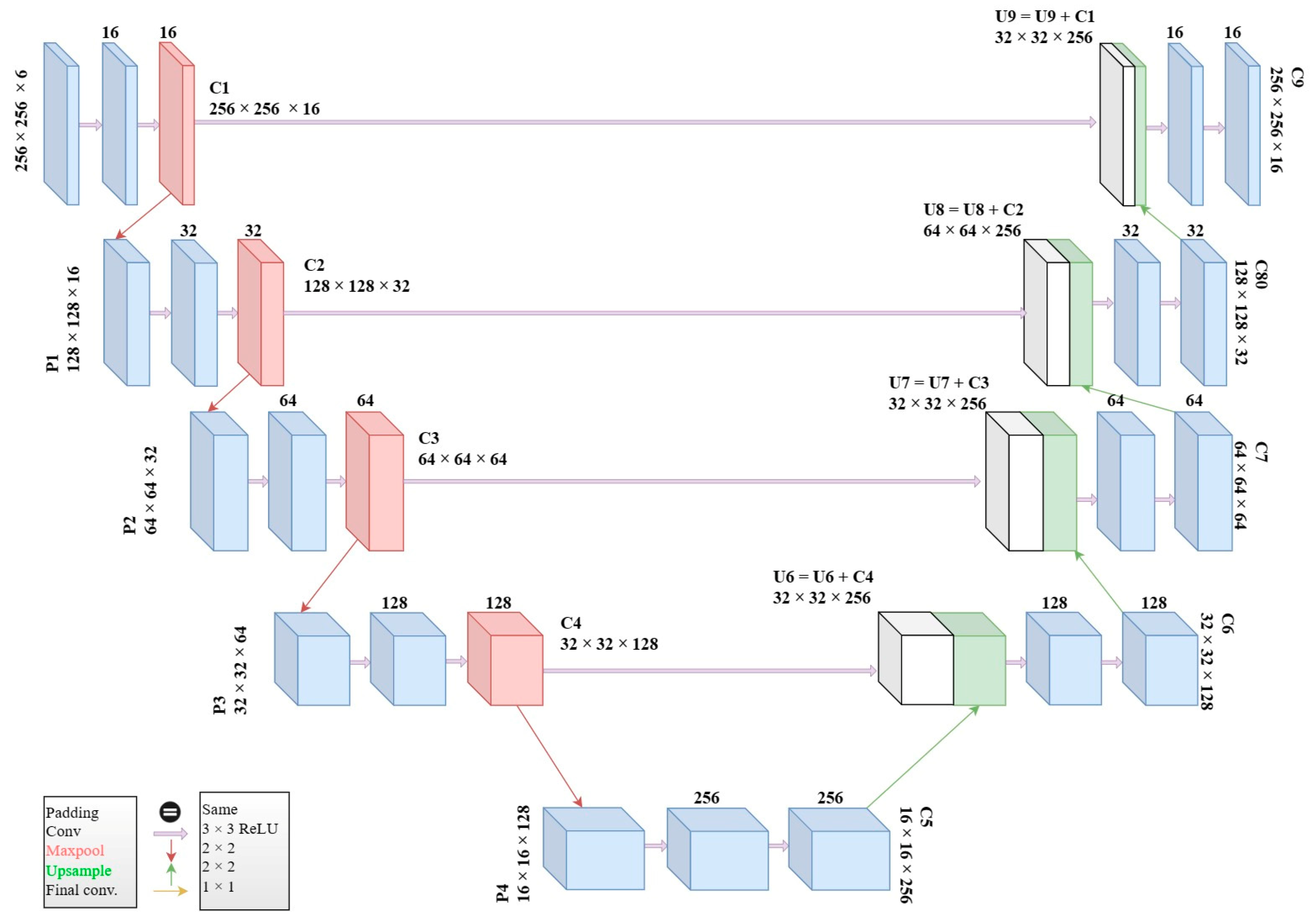
2.3.3. U-Net Semantic Segmentation
2.4. BW Heights
2.5. Performance Metrics
3. Results
3.1. Performance of Various Input Training Data
3.2. Validation of Trained U-Net Model for Testing Data
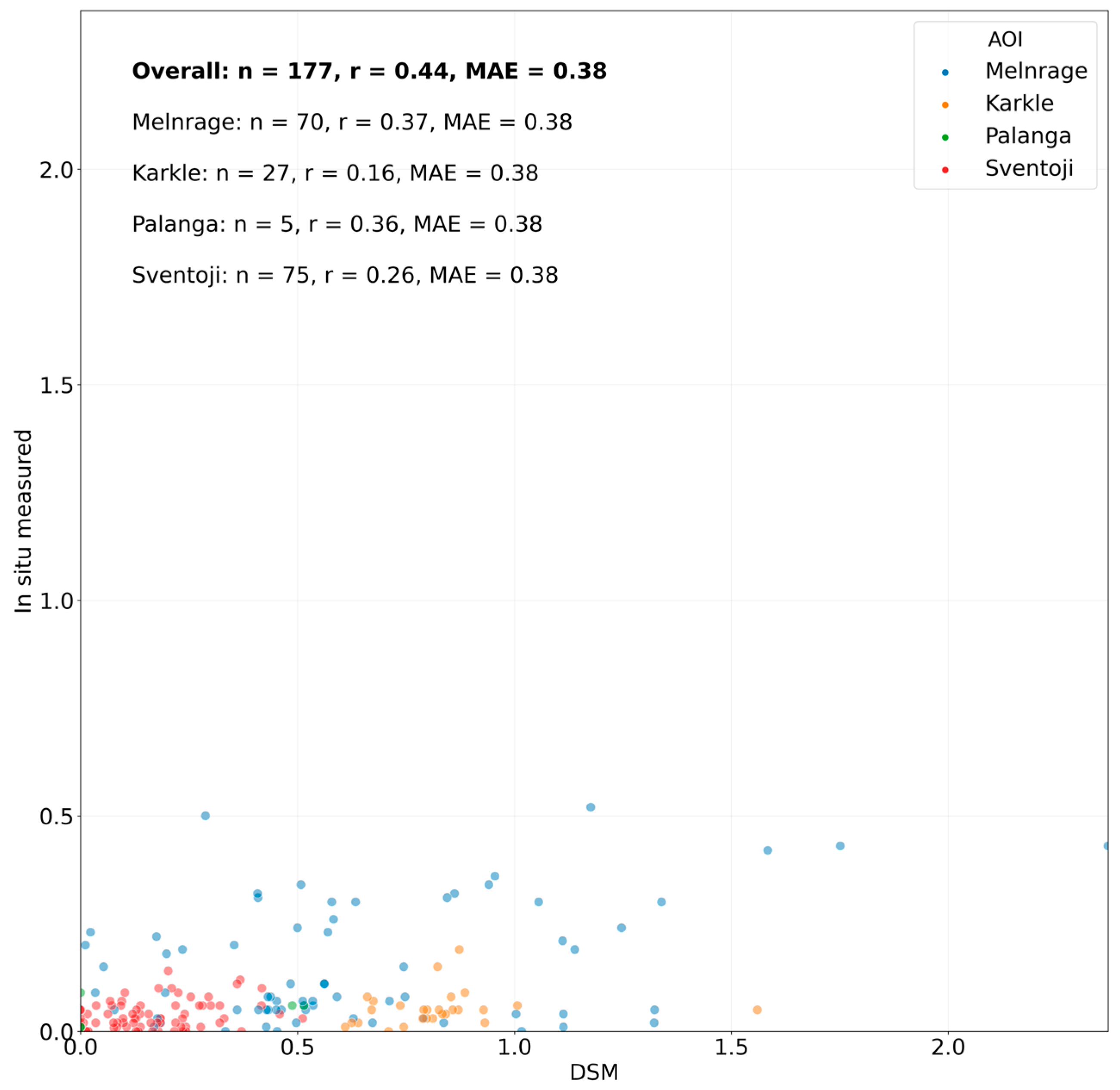
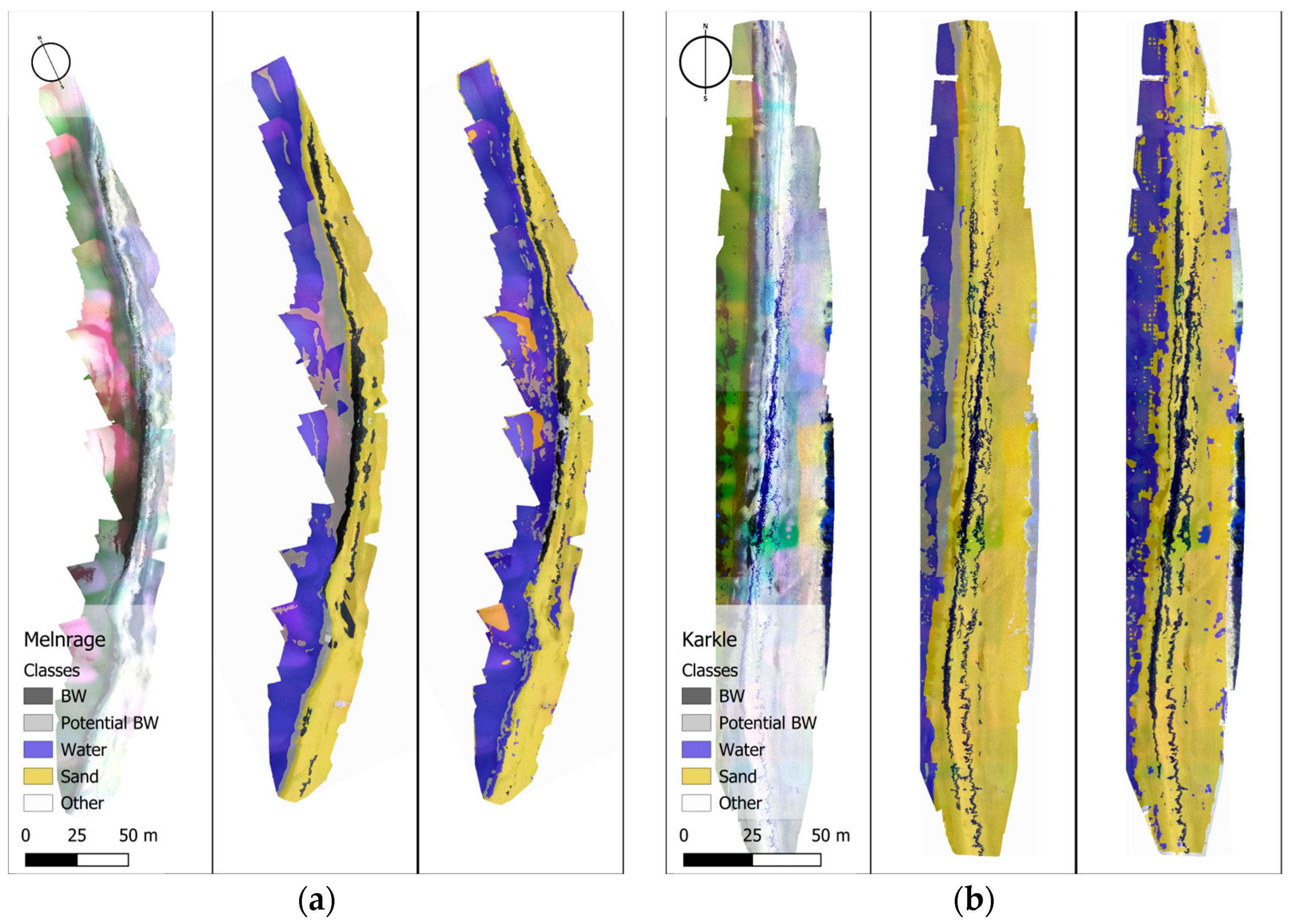
3.3. Heights and Areas of BW
4. Discussion
4.1. Assessment of U-Net Model Performance in BW Segmentation
4.2. Model Transferability
4.3. Data Combination Influence on the Results
4.4. Class Influence on the Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Robbe, E.; Woelfel, J.; Balčiūnas, A.; Schernewski, G. An Impact Assessment of Beach Wrack and Litter on Beach Ecosystem Services to Support Coastal Management at the Baltic Sea. Environ. Manag. 2021, 68, 835–859. [Google Scholar] [CrossRef] [PubMed]
- Orr, M.; Zimmer, M.; Jelinski, D.E.; Mews, M. Wrack Deposition on Different Beach Types: Spatial and Temporal Variation in the Pattern of Subsidy. Ecology 2005, 86, 1496–1507. [Google Scholar] [CrossRef]
- Gibson, R.; Atkinson, R.; Gordon, J.; Editors, T.; In, F.; Airoldi, L.; Beck, M. Loss, Status and Trends for Coastal Marine Habitats of Europe. Annu. Rev. 2007, 45, 345–405. [Google Scholar] [CrossRef]
- Rudovica, V.; Rotter, A.; Gaudêncio, S.P.; Novoveská, L.; Akgül, F.; Akslen-Hoel, L.K.; Alexandrino, D.A.; Anne, O.; Arbidans, L.; Atanassova, M. Valorization of Marine Waste: Use of Industrial by-Products and Beach Wrack towards the Production of High Added-Value Products. Front. Mar. Sci. 2021, 8, 723333. [Google Scholar] [CrossRef]
- McLachlan, A.; Defeo, O. The Ecology of Sandy Shores; Academic Press: Cambridge, MA, USA, 2017; ISBN 978-0-12-809698-7. [Google Scholar]
- Kalvaitienė, G.; Vaičiūtė, D.; Bučas, M.; Gyraitė, G.; Kataržytė, M. Macrophytes and Their Wrack as a Habitat for Faecal Indicator Bacteria and Vibrio in Coastal Marine Environments. Mar. Pollut. Bull. 2023, 194, 115325. [Google Scholar] [CrossRef] [PubMed]
- Suursaar, Ü.; Torn, K.; Martin, G.; Herkül, K.; Kullas, T. Formation and Species Composition of Stormcast Beach Wrack in the Gulf of Riga, Baltic Sea. Oceanologia 2014, 56, 673–695. [Google Scholar] [CrossRef]
- Moulton, M.A.B.; Hesp, P.A.; Miot da Silva, G.; Keane, R.; Fernandez, G.B. Surfzone-Beach-Dune Interactions along a Variable Low Wave Energy Dissipative Beach. Mar. Geol. 2021, 435, 106438. [Google Scholar] [CrossRef]
- Gómez-Pazo, A.; Pérez-Alberti, A.; Trenhaile, A. Recording Inter-Annual Changes on a Boulder Beach in Galicia, NW Spain Using an Unmanned Aerial Vehicle. Earth Surf. Process. Landf. 2019, 44, 1004–1014. [Google Scholar] [CrossRef]
- Schlacher, T.A.; Schoeman, D.S.; Dugan, J.; Lastra, M.; Jones, A.; Scapini, F.; McLachlan, A. Sandy Beach Ecosystems: Key Features, Sampling Issues, Management Challenges and Climate Change Impacts. Mar. Ecol. 2008, 29, 70–90. [Google Scholar] [CrossRef]
- Bussotti, S.; Guidetti, P.; Rossi, F. Posidonia Oceanica Wrack Beds as a Fish Habitat in the Surf Zone. Estuar. Coast. Shelf Sci. 2022, 272, 107882. [Google Scholar] [CrossRef]
- Woelfel, J.; Hofmann, J.; Müsch, M.; Gilles, A.; Siemen, H.; Schubert, H. Beach Wrack of the Baltic Sea Challenges for Sustainable Use and Management (Toolkit); Report of the Interreg Project CONTRA; 2021; 49p. [Google Scholar]
- Nevers, M.B.; Whitman, R.L. Efficacy of Monitoring and Empirical Predictive Modeling at Improving Public Health Protection at Chicago Beaches. Water Res. 2011, 45, 1659–1668. [Google Scholar] [CrossRef] [PubMed]
- Schernewski, G.; Balciunas, A.; Gräwe, D.; Gräwe, U.; Klesse, K.; Schulz, M.; Wesnigk, S.; Fleet, D.; Haseler, M.; Möllman, N.; et al. Beach Macro-Litter Monitoring on Southern Baltic Beaches: Results, Experiences and Recommendations. J. Coast. Conserv. 2018, 22, 5–25. [Google Scholar] [CrossRef]
- Pan, Y.; Flindt, M.; Schneider-Kamp, P.; Holmer, M. Beach Wrack Mapping Using Unmanned Aerial Vehicles for Coastal Environmental Management. Ocean Coast. Manag. 2021, 213, 105843. [Google Scholar] [CrossRef]
- Mishra, S.; Mishra, D.R. Normalized Difference Chlorophyll Index: A Novel Model for Remote Estimation of Chlorophyll-a Concentration in Turbid Productive Waters. Remote Sens. Environ. 2012, 117, 394–406. [Google Scholar] [CrossRef]
- Hantson, W.; Kooistra, L.; Slim, P.A. Mapping Invasive Woody Species in Coastal Dunes in the Netherlands: A Remote Sensing Approach Using LIDAR and High-Resolution Aerial Photographs. Appl. Veg. Sci. 2012, 15, 536–547. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Pan, Y.; Ayoub, N.; Schneider-Kamp, P.; Flindt, M.; Holmer, M. Beach Wrack Dynamics Using a Camera Trap as the Real-Time Monitoring Tool. Front. Mar. Sci. 2022, 9, 813516. [Google Scholar] [CrossRef]
- Karstens, S.; Kiesel, J.; Petersen, J.; Etter, K.; Schneider von Deimling, J.; Vafeidis, A.; Gross, F. Human-Induced Hydrological Connectivity: Impacts of Footpaths on Beach Wrack Transport in a Frequently Visited Baltic Coastal Wetland. Front. Mar. Sci. 2022, 9, 929274. [Google Scholar] [CrossRef]
- Pan, X.; Zhao, J.; Xu, J. An Object-Based and Heterogeneous Segment Filter Convolutional Neural Network for High-Resolution Remote Sensing Image Classification. Int. J. Remote Sens. 2019, 40, 5892–5916. [Google Scholar] [CrossRef]
- Lu, B.; He, Y.; Dao, P. Comparing the Performance of Multispectral and Hyperspectral Images for Estimating Vegetation Properties. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1784–1797. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Jian, J. Remote Sensing Landslide Recognition Based on Convolutional Neural Network. Math. Probl. Eng. 2019, 2019, e8389368. [Google Scholar] [CrossRef]
- Tomasello, A.; Bosman, A.; Signa, G.; Rende, S.F.; Andolina, C.; Cilluffo, G.; Cassetti, F.P.; Mazzola, A.; Calvo, S.; Randazzo, G.; et al. 3D-Reconstruction of a Giant Posidonia Oceanica Beach Wrack (Banquette): Sizing Biomass, Carbon and Nutrient Stocks by Combining Field Data With High-Resolution UAV Photogrammetry. Front. Mar. Sci. 2022, 9, 903138. [Google Scholar] [CrossRef]
- Kelpšaitė-Rimkienė, L.; Dailidiene, I. Influence of Wind Wave Climate Change on Coastal Processes in the Eastern Baltic Sea. J. Coast. Res. 2011, 220–224. [Google Scholar]
- Jarmalavičius, D.; Zilinskas, G.; Pupienis, D. Daugiamečiai Baltijos Jūros Lietuvos Paplūdimių Morfodinaminiai Ypatumai. Geografija 2011, 47, 98–106. [Google Scholar] [CrossRef]
- Kalvaitienė, G.; Bučas, M.; Vaičiūtė, D.; Balčiūnas, A.; Gyraitė, G.; Kataržytė, M. Impact of Beach Wrack on Microorganisms Associated with Faecal Pollution at the Baltic Sea Beaches. SSRN 2023. [Google Scholar] [CrossRef]
- Bučas, M.; Daunys, D.; Olenin, S. Recent Distribution and Stock Assessment of the Red Alga Furcellaria Lumbricalis on an Exposed Baltic Sea Coast: Combined Use of FIeld Survey and Modelling Methods. Oceanologia 2009, 51, 341–359. [Google Scholar] [CrossRef]
- Arzt, M.; Deschamps, J.; Schmied, C.; Pietzsch, T.; Schmidt, D.; Tomancak, P.; Haase, R.; Jug, F. LABKIT: Labeling and Segmentation Toolkit for Big Image Data. Front. Comput. Sci. 2022, 4, 777728. [Google Scholar] [CrossRef]
- GDAL/OGR Contributors. GDAL—Geospatial Data Abstraction Library. 2022. Available online: https://gdal.org/index.html (accessed on 18 September 2023).
- Karlsen, S.R.; Anderson, H.B.; van der Wal, R.; Hansen, B.B. A New NDVI Measure That Overcomes Data Sparsity in Cloud-Covered Regions Predicts Annual Variation in Ground-Based Estimates of High Arctic Plant Productivity. Environ. Res. Lett. 2018, 13, 025011. [Google Scholar] [CrossRef]
- Wang, H.; Liu, H.; Huang, N.; Bi, J.; Ma, X.; Ma, Z.; Shangguan, Z.; Zhao, H.; Feng, Q.; Liang, T.; et al. Satellite-Derived NDVI Underestimates the Advancement of Alpine Vegetation Growth over the Past Three Decades. Ecology 2021, 102, e03518. [Google Scholar] [CrossRef]
- Marusig, D.; Petruzzellis, F.; Tomasella, M.; Napolitano, R.; Altobelli, A.; Nardini, A. Correlation of Field-Measured and Remotely Sensed Plant Water Status as a Tool to Monitor the Risk of Drought-Induced Forest Decline. Forests 2020, 11, 77. [Google Scholar] [CrossRef]
- Zhang, C.; Pattey, E.; Liu, J.; Cai, H.; Shang, J.; Dong, T. Retrieving Leaf and Canopy Water Content of Winter Wheat Using Vegetation Water Indices. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 112–126. [Google Scholar] [CrossRef]
- Sharifi, A.; Felegari, S. Remotely Sensed Normalized Difference Red-Edge Index for Rangeland Biomass Estimation. Aircr. Eng. Aerosp. Technol. 2023, 95, 1128–1136. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Chollet, F. Keras. 2015. Available online: https://github.com/fchollet/keras (accessed on 30 October 2023).
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Distributed Systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.-A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 565–571. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef] [PubMed]
- Vooban/Smoothly-Blend-Image-Paches. Available online: https://github.com/Vooban/Smoothly-Blend-Image-Patches (accessed on 30 October 2023).
- Kohavi, R. A Study of Cross-Validation and Bootstrap for Accuracy Estimation and Model Selection. In Proceedings of the 14th International Joint Conference on Artificial Intelligence, Montreal, QC, Canada, 20–25 August 1995. [Google Scholar]
- Kumar, S.; Jain, A.; Agarwal, A.; Rani, S.; Ghimire, A. Object-Based Image Retrieval Using the U-Net-Based Neural Network. Comput. Intell. Neurosci. 2021, 2021, 4395646. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.H.; Lee, H.; Hong, S.J.; Kim, S.; Park, J.; Hwang, J.Y.; Choi, J.P. Objects Segmentation From High-Resolution Aerial Images Using U-Net With Pyramid Pooling Layers. IEEE Geosci. Remote Sens. Lett. 2019, 16, 115–119. [Google Scholar] [CrossRef]
- Taravat, A.; Wagner, M.P.; Bonifacio, R.; Petit, D. Advanced Fully Convolutional Networks for Agricultural Field Boundary Detection. Remote Sens. 2021, 13, 722. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array Programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Seabold, S.; Perktold, J. Statsmodels: Econometric and Statistical Modeling with Python. In Proceedings of the 9th Python in Science Conference, Austin, TX, USA, 28 June–2 July 2010; pp. 92–96. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Su, Z.; Li, W.; Ma, Z.; Gao, R. An Improved U-Net Method for the Semantic Segmentation of Remote Sensing Images. Appl. Intell. 2022, 52, 3276–3288. [Google Scholar] [CrossRef]
- Müller, D.; Soto-Rey, I.; Kramer, F. Towards a Guideline for Evaluation Metrics in Medical Image Segmentation. BMC Res. Notes 2022, 15, 210. [Google Scholar] [CrossRef] [PubMed]
- Anita, S.M.; Arend, K.; Mayer, C.; Simonson, M.; Mackey, S. Different Colours of Shadows: Classification of UAV Images. Int. J. Remote Sens. 2017, 38, 8–10. [Google Scholar]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef]
- Brouwer, R.; De Schipper, M.; Rynne, P.; Graham, F.; Reniers, A.; Macmahan, J. Surfzone Monitoring Using Rotary Wing Unmanned Aerial Vehicles. J. Atmos. Ocean. Technol. 2015, 32, 855–863. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y.; Chen, H.; Wu, W.; Chen, K.; Wang, S. Anchor-Free YOLOv3 for Mass Detection in Mammogram. Expert Syst. Appl. 2022, 191, 116273. [Google Scholar] [CrossRef]
- Bao, Z.; Sodango, T.; Shifaw, E.; Li, X.; Sha, J. Monitoring of Beach Litter by Automatic Interpretation of Unmanned Aerial Vehicle Images Using the Segmentation Threshold Method. Mar. Pollut. Bull. 2018, 137, 388–398. [Google Scholar] [CrossRef]
- Lu, C.-H. Applying UAV and photogrammetry to monitor the morphological changes along the beach in Penghu Islands. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 1153–1156. [Google Scholar] [CrossRef]
- Pichon, L.; Ducanchez, A.; Fonta, H.; Tisseyre, B. Quality of Digital Elevation Models Obtained from Unmanned Aerial Vehicles for Precision Viticulture. OENO One 2016, 50, 3. [Google Scholar] [CrossRef]
- Gruszczyński, W.; Puniach, E.; Ćwiąkała, P.; Matwij, W. Application of Convolutional Neural Networks for Low Vegetation Filtering from Data Acquired by UAVs. ISPRS J. Photogramm. Remote Sens. 2019, 158, 1–10. [Google Scholar] [CrossRef]
- Taddia, Y.; Corbau, C.; Zambello, E.; Pellegrinelli, A. UAVs for Structure-From-Motion Coastal Monitoring: A Case Study to Assess the Evolution of Embryo Dunes over a Two-Year Time Frame in the Po River Delta, Italy. Sensors 2019, 19, 1717. [Google Scholar] [CrossRef]
- Tao, C.; Meng, Y.; Li, J.; Yang, B.; Hu, F.; Li, Y.; Cui, C.; Zhang, W. MSNet: Multispectral Semantic Segmentation Network for Remote Sensing Images. GISci. Remote Sens. 2022, 59, 1177–1198. [Google Scholar] [CrossRef]
- Amiri, M.; Brooks, R.; Rivaz, H. Fine-Tuning U-Net for Ultrasound Image Segmentation: Different Layers, Different Outcomes. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 67, 2510–2518. [Google Scholar] [CrossRef] [PubMed]
- Matuszewski, D.J.; Sintorn, I.-M. Reducing the U-Net Size for Practical Scenarios: Virus Recognition in Electron Microscopy Images. Comput. Methods Progr. Biomed. 2019, 178, 31–39. [Google Scholar] [CrossRef]
- Rao, A.; Nguyen, T.; Palaniswami, M.; Ngo, T. Vision-Based Automated Crack Detection Using Convolutional Neural Networks for Condition Assessment of Infrastructure. Struct. Health Monit. 2020, 20, 1–19. [Google Scholar] [CrossRef]
- Rodrigues, L.F.; Naldi, M.C.; Mari, J.F. Comparing Convolutional Neural Networks and Preprocessing Techniques for HEp-2 Cell Classification in Immunofluorescence Images. Comput. Biol. Med. 2020, 116, 103542. [Google Scholar] [CrossRef] [PubMed]
- Dubey, S.R.; Chakraborty, S.; Roy, S.K.; Mukherjee, S.; Singh, S.K.; Chaudhuri, B.B. diffGrad: An Optimization Method for Convolutional Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 4500–4511. [Google Scholar] [CrossRef]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks. In Proceedings of the Computer Vision—ECCV, Zurich, Switzerland, 6–12 September 2014; Springer International Publishing: Cham, Switzerland, 2014; pp. 818–833. [Google Scholar]
- Altmann, A.; Toloşi, L.; Sander, O.; Lengauer, T. Permutation Importance: A Corrected Feature Importance Measure. Bioinformatics 2010, 26, 1340–1347. [Google Scholar] [CrossRef]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar]
- Thomazella, R.; Castanho, J.E.; Dotto, F.R.L.; Júnior, O.P.R.; Rosa, G.H.; Marana, A.N.; Papa, J.P. Environmental Monitoring Using Drone Images and Convolutional Neural Networks. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8941–8944. [Google Scholar]
- Xue, K.; Zhang, Y.; Duan, H.; Ma, R. Variability of Light Absorption Properties in Optically Complex Inland Waters of Lake Chaohu, China. J. Great Lakes Res. 2017, 43, 17–31. [Google Scholar] [CrossRef]
- Gagliardini, D.A.; Colón, P.C. A Comparative Assessment on the Use of SAR and High-Resolution Optical Images in Ocean Dynamics Studies. Int. J. Remote Sens. 2004, 25, 1271–1275. [Google Scholar] [CrossRef]
- Overstreet, B.T.; Legleiter, C.J. Removing Sun Glint from Optical Remote Sensing Images of Shallow Rivers. Earth Surf. Process. Landf. 2017, 42, 318–333. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, K.; Lou, X.; Li, Y.; Zheng, G.; Wang, J.; Wang, X.; Ren, L.; Li, D.; Shi, A. Observation of Sea Surface Roughness at a Pixel Scale Using Multi-Angle Sun Glitter Images Acquired by the ASTER Sensor. Remote Sens. Environ. 2018, 208, 97–108. [Google Scholar] [CrossRef]
- Nomura, K.; Sugimura, D.; Hamamoto, T. Underwater Image Color Correction Using Exposure-Bracketing Imaging. IEEE Signal Process. Lett. 2018, 25, 893–897. [Google Scholar] [CrossRef]
- Tiškus, E.; Bučas, M.; Vaičiūtė, D.; Gintauskas, J.; Babrauskienė, I. An Evaluation of Sun-Glint Correor allction Methods for UAV-Derived Secchi Depth Estimations in Inland Water Bodies. Drones 2023, 7, 546. [Google Scholar] [CrossRef]
- Windle, A.E.; Silsbe, G.M. Evaluation of Unoccupied Aircraft System (UAS) Remote Sensing Reflectance Retrievals for Water Quality Monitoring in Coastal Waters. Front. Environ. Sci. 2021, 9, 674247. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Melnrage | Karkle | Palanga | Sventoji |
|---|---|---|---|---|
| Proximity to urban area | Close to the port city | Far from urban areas | Close to resort city | Close to resort city |
| Beach cleaning | No | No | Frequently | Frequently |
| Coastal features | Sand dunes | Sand dunes, boulders, and clay cliffs | Sand dunes | Sand dunes |
| Reefs (hard substrate overgrown by macroalgae) | Breakwater | Natural reefs | Natural reefs, groyne, and scaffoldings of pier | Scaffoldings of pier |
| Beach width by Jarmalavičius et al. [26] | ±45 m | ±11 m | ±76 m | ±107 m |
| Date/AOI | Melnrage | Karkle | Palanga | Sventoji |
|---|---|---|---|---|
| 25 August 2021 | ✓ | ✓✓ | ||
| 8 September 2021 | ✓ | |||
| 15 September 2021 | ✓ | ✓ | ||
| 17 September 2021 | ✓✓ | ✓ | ||
| 22 September 2021 | ✓ | ✓ | ||
| 29 September 2021 | ✓ | |||
| 1 October 2021 | ✓ | |||
| 26 October 2021 | ✓ | ✓ | ||
| 4 March 2022 | ✓ | |||
| 22 March 2022 | ✓ |
| Melnrage | Karkle | Palanga | Sventoji |
|---|---|---|---|
| 2021.04.20 (3) | 220.12.05 (1) | 2020.12.05 (2) | 2020.12.05 (4) |
| 2021.06.02 (20) | 2021.07.27 (3) | 2021.07.29 (3) | 2021.07.07 (10) |
| 2021.06.18 (11) | 2021.09.17 (23) | 2021.08.27 (3) | |
| 2021.08.10 (8) | 2021.09.17 (58) | ||
| 2021.09.16 (25) | |||
| 2022.01.24 (3) |
| Dataset Type | 5 Bands and Height | 5 Bands | RGB | RGB and Height | Augmented Data | Band Ratio Indices |
|---|---|---|---|---|---|---|
| IoU avg. | 0.67 | 0.71 * | 0.69 | 0.69 | 0.66 | 0.67 |
| Beach wrack | 0.72 | 0.73 | 0.71 | 0.66 | 0.67 | 0.75 * |
| Potential beach wrack | 0.35 | 0.4 | 0.35 | 0.38 | 0.3 | 0.39 * |
| Water | 0.68 | 0.73 | 0.69 | 0.73 | 0.7 | 0.65 |
| Sand | 0.75 | 0.81 | 0.76 | 0.78 | 0.74 | 0.71 |
| Other | 0.86 | 0.89 | 0.93 | 0.92 | 0.88 | 0.86 |
| F1 score avg. | 0.87 | 0.9 * | 0.88 | 0.89 | 0.87 | 0.86 |
| Beach wrack | 0.83 | 0.84 | 0.83 | 0.79 | 0.8 | 0.86 * |
| Potential beach wrack | 0.52 | 0.57 * | 0.51 | 0.55 | 0.46 | 0.56 |
| Water | 0.81 | 0.85 | 0.82 | 0.84 | 0.83 | 0.79 |
| Sand | 0.86 | 0.89 | 0.86 | 0.88 | 0.85 | 0.83 |
| Other | 0.94 | 0.96 | 0.97 | 0.97 | 0.96 | 0.94 |
| Precision avg. | 0.88 | 0.90 * | 0.89 | 0.9 * | 0.88 | 0.87 |
| Beach wrack | 0.76 | 0.87 | 0.87 | 0.89 * | 0.83 | 0.79 |
| Potential beach wrack | 0.51 | 0.54 | 0.5 | 0.48 | 0.37 | 0.8 * |
| Water | 0.77 | 0.83 | 0.79 | 0.82 | 0.79 | 0.77 |
| Sand | 0.87 | 0.89 | 0.88 | 0.91 | 0.89 | 0.79 |
| Other | 0.99 | 0.98 | 0.98 | 0.97 | 0.98 | 0.98 |
| Recall avg. | 0.87 | 0.89 * | 0.88 | 0.89 * | 0.87 | 0.86 |
| Beach wrack | 0.93 | 0.81 | 0.79 | 0.72 | 0.77 | 0.94 * |
| Potential beach wrack | 0.53 | 0.6 | 0.53 | 0.66 * | 0.58 | 0.43 |
| Water | 0.86 | 0.87 | 0.86 | 0.86 | 0.87 | 0.8 |
| Sand | 0.85 | 0.9 | 0.84 | 0.85 | 0.82 | 0.88 |
| Other | 0.9 | 0.95 | 0.97 | 0.97 | 0.93 | 0.91 |
| Data Combinations | r | MAE | RMSE |
|---|---|---|---|
| 5 bands and height area | 0.48 | 807.99 | 1512.91 |
| Augmented data area | 0.73 | 575.91 | 902.87 |
| Band ratio indices area | 0.68 | 648.42 | 1097.48 |
| 5 bands area | 0.46 | 825.54 | 1377.34 |
| RGB area | 0.87 | 562.27 | 783.59 |
| RGB and height area | 0.86 | 658.28 | 897.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tiškus, E.; Bučas, M.; Gintauskas, J.; Kataržytė, M.; Vaičiūtė, D. U-Net Performance for Beach Wrack Segmentation: Effects of UAV Camera Bands, Height Measurements, and Spectral Indices. Drones 2023, 7, 670. https://doi.org/10.3390/drones7110670
Tiškus E, Bučas M, Gintauskas J, Kataržytė M, Vaičiūtė D. U-Net Performance for Beach Wrack Segmentation: Effects of UAV Camera Bands, Height Measurements, and Spectral Indices. Drones. 2023; 7(11):670. https://doi.org/10.3390/drones7110670
Chicago/Turabian StyleTiškus, Edvinas, Martynas Bučas, Jonas Gintauskas, Marija Kataržytė, and Diana Vaičiūtė. 2023. "U-Net Performance for Beach Wrack Segmentation: Effects of UAV Camera Bands, Height Measurements, and Spectral Indices" Drones 7, no. 11: 670. https://doi.org/10.3390/drones7110670