

Hyper-Local Weather Predictions with the Enhanced General Urban Area Microclimate Predictions Tool

 , ,
, ,
Abstract
:1. Introduction
2. Methodology
2.1. GUMP Overview
2.1.1. Machine-Learning Forecasting
2.1.2. Iterative Inference Using CFD
2.1.3. User Interface
2.2. sUAS Flight Operations
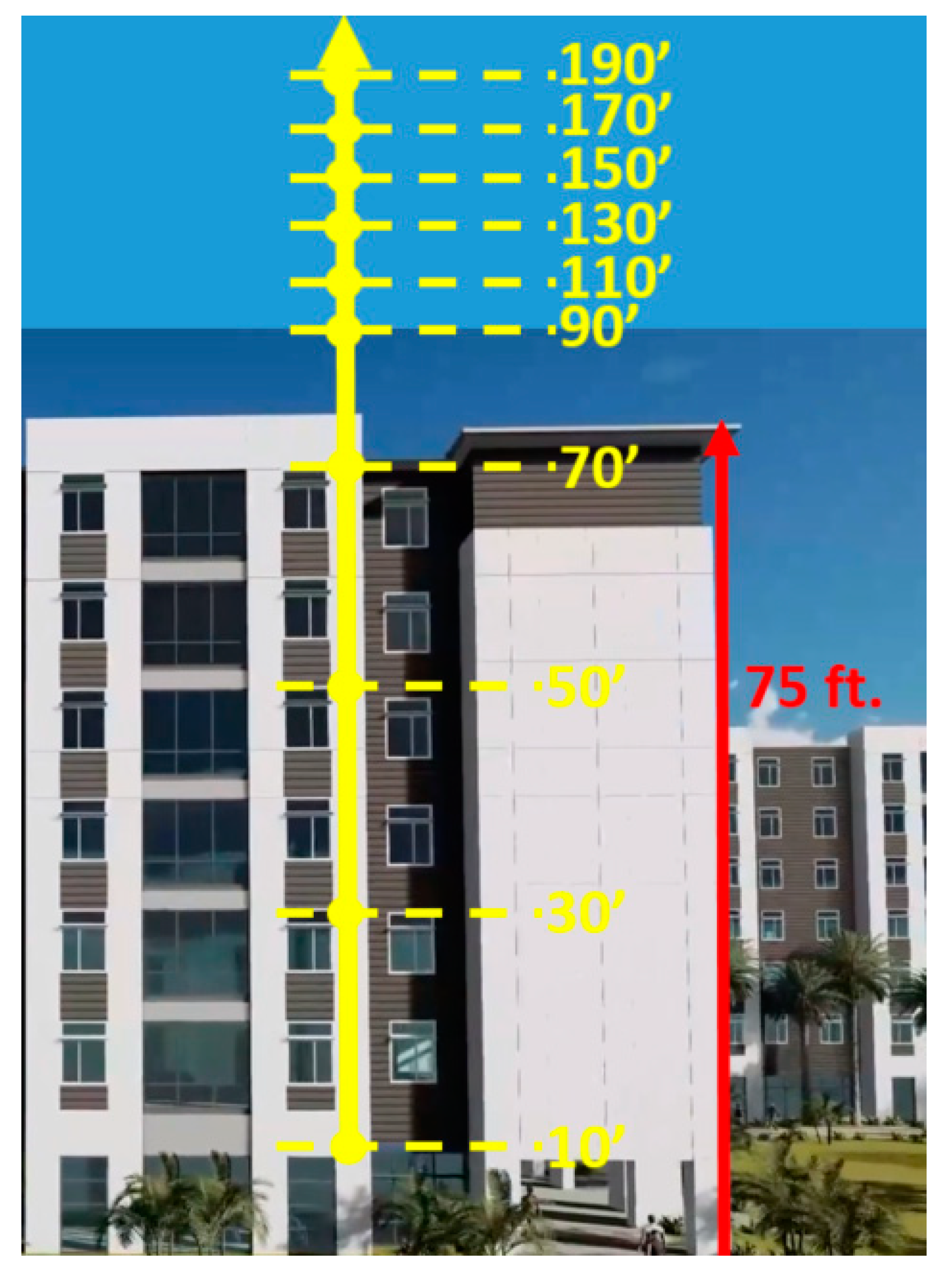
2.2.1. Experimental Setting
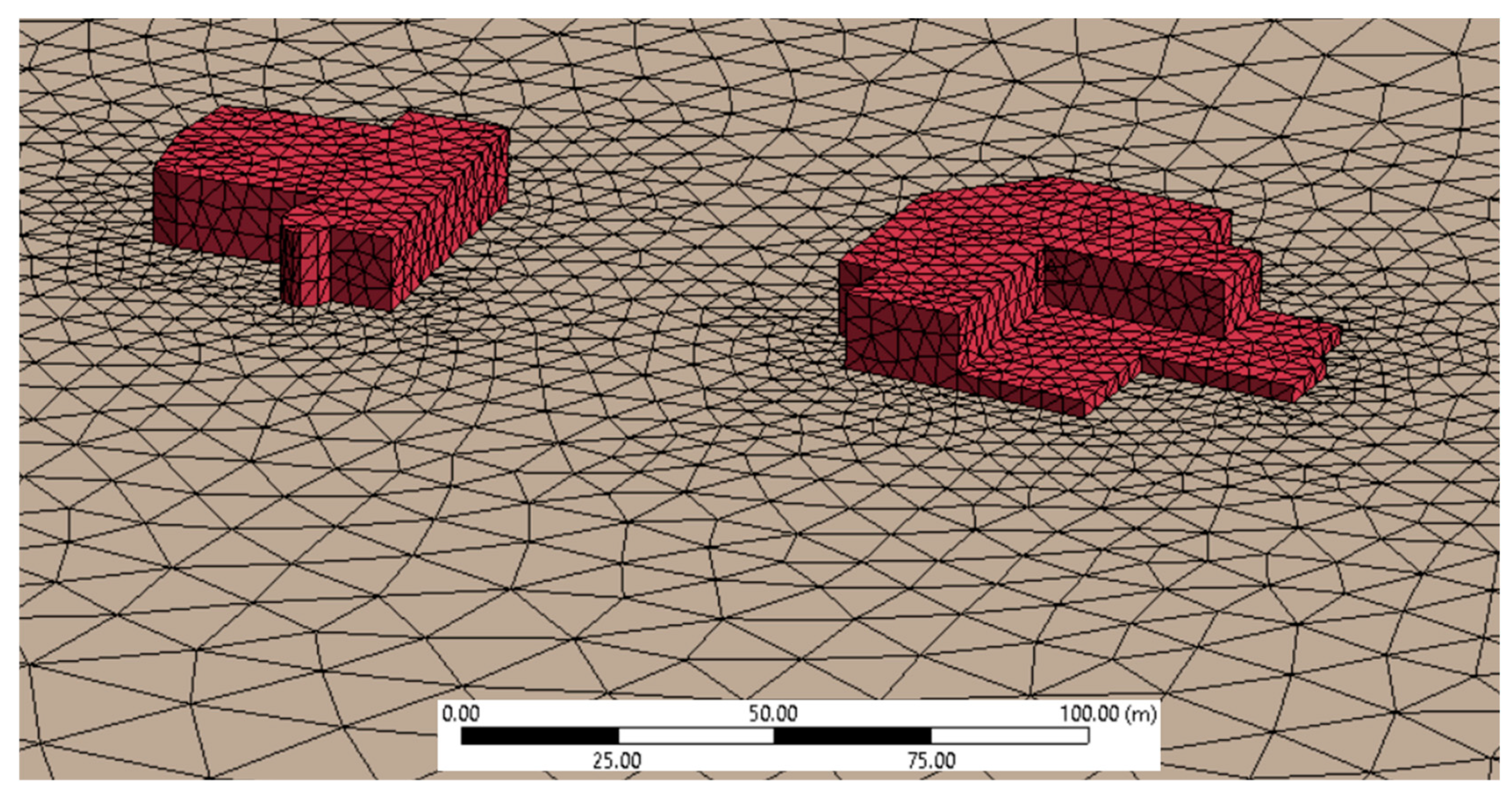
2.2.2. Creation of the Built Environment Model
2.2.3. Observations by Meteorologically Instrumented sUAS
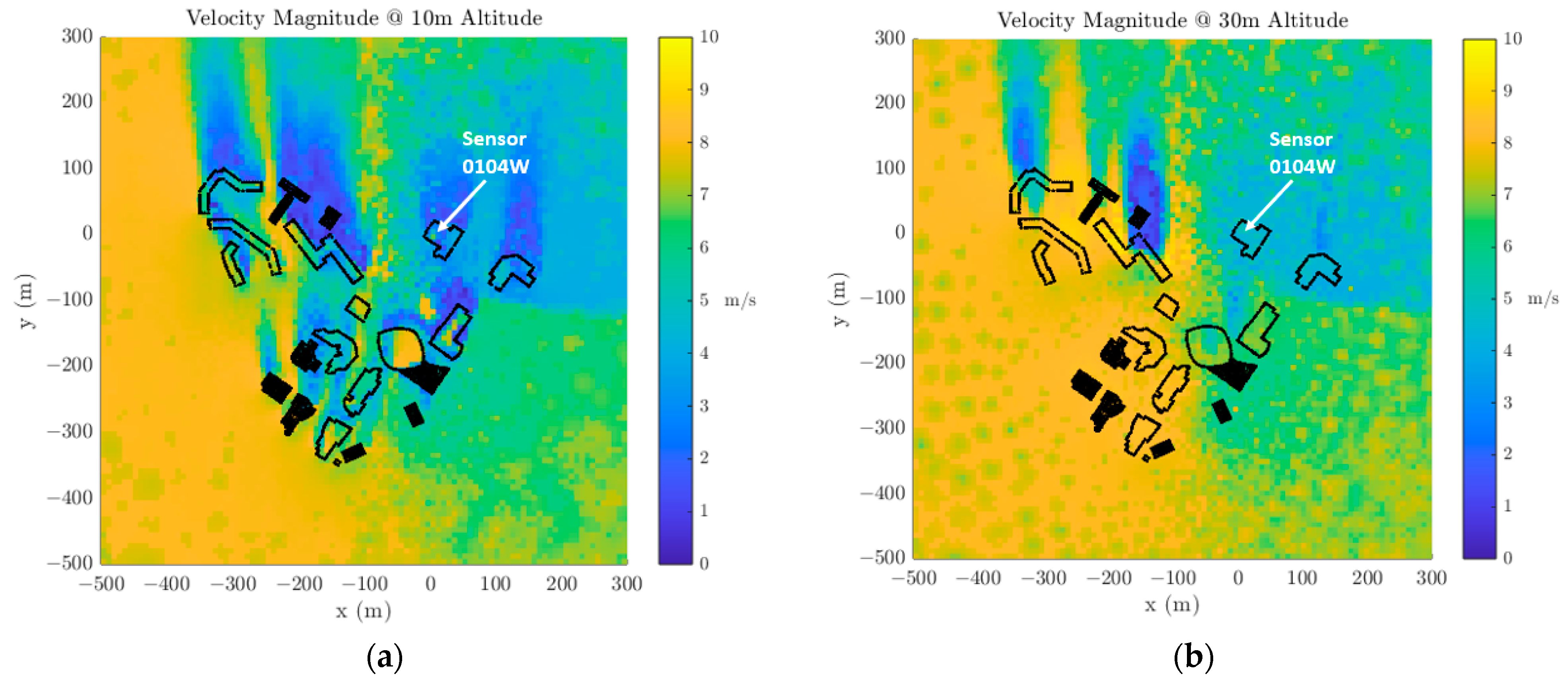
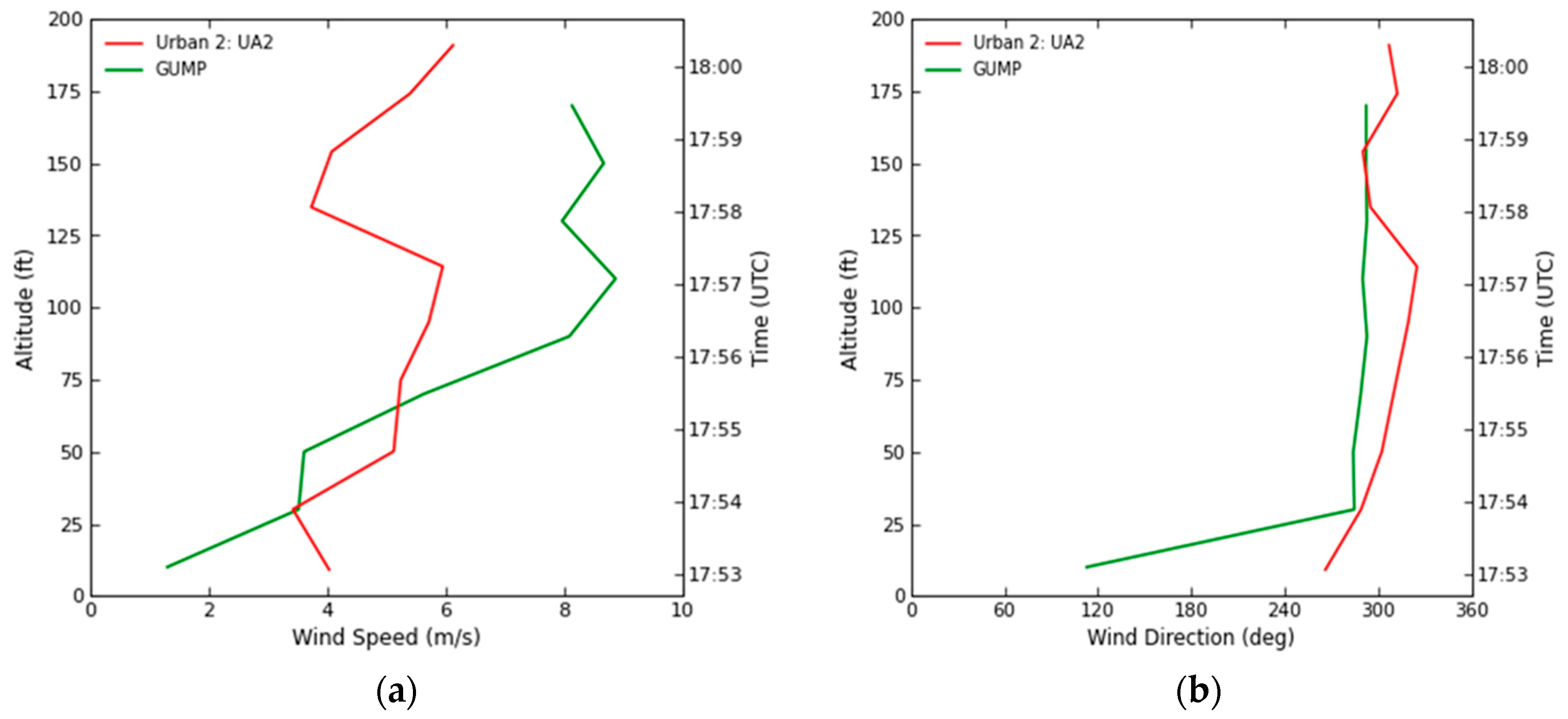
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- NASA Is Creating an Advanced Air Mobility Playbook. Available online: https://www.nasa.gov/feature/nasa-is-creating-an-advanced-air-mobility-playbook (accessed on 5 March 2023).
- MITRE Corporation. Urban Air Mobility Airspace Integration Concepts: Operational Concepts and Exploration Approaches; 19-00667-9; MITRE Corporation: McLean, VA, USA, 2019. [Google Scholar]
- EHang Holdings Limited. The Future of Transportation: White Paper on Urban Air Mobility Systems; EHang Holdings Limited: Guangzhou, China, 2020. [Google Scholar]
- EmbraerX. Flight Plan 2030: An Air Traffic Management Concept for Urban Air Mobility. Available online: https://daflwcl3bnxyt.cloudfront.net/m/4e5924f5de45fd3a/original/embraerx-whitepaper-flightplan2030.pdf (accessed on 5 March 2023).
- Uber Elevate. Fast-Forwarding to a Future of On-Demand Urban Air Transportation; Uber Elevate: San Francisco, CA, USA, 2016. [Google Scholar]
- Porsche Consulting Stuttgart. The Future of Vertical Mobility: Sizing the Market for Passenger, Inspection, and Goods & Services Until 2035; Porsche Consulting Stuttgart: Stuttgart, Germany, 2018. [Google Scholar]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer: Dordrecht, The Netherlands, 1988. [Google Scholar] [CrossRef]
- Oke, T.R.; Mills, G.; Christen, A.; Voogt, A. Urban Climates; Cambridge University Press: Cambridge, MA, USA, 2017. [Google Scholar] [CrossRef] [Green Version]
- Lundquist, K.A.; Chow, F.K.; Lundquist, J.K. An Immersed Boundary Method for the Weather Research and Forecasting Model. Mon. Weather Rev. 2010, 138, 796–817. [Google Scholar] [CrossRef]
- Ching, J.; Rotunno, R.; LeMone, M.; Martilli, A.; Kosovic, B.; Jimenez, P.A.; Dudhia, J. Convectively Induced Secondary Circulations in Fine-Grid Mesoscale Numerical Weather Prediction Models. Mon. Weather Rev. 2014, 142, 3284–3302. [Google Scholar] [CrossRef] [Green Version]
- Toparlar, Y.; Blocken, B.; Maiheu, B.; van Heijstd, G.J.F. A Review on the CFD Analysis of Urban Microclimate. Renew. Sustain. Energy Rev. 2017, 80, 1613–1640. [Google Scholar] [CrossRef]
- Ware, J.; Roy, N. An Analysis of Wind Field Estimation and Exploitation for Quadrotor Flight in the Urban Canopy Layer. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Chow, F.K.; Street, R.L. Evaluation of Turbulence Closure Models for Large-Eddy Simulation over Complex Terrain: Flow over Askervein Hill. J. Appl. Meteorol. Climatol. 2009, 48, 1050–1065. [Google Scholar] [CrossRef] [Green Version]
- Hanna, S.R.; Brown, M.J.; Camelli, F.E.; Chan, S.T.; Coirier, W.J.; Hansen, O.R.; Huber, A.H.; Kim, S.; Reynolds, R.M. Detailed Simulations of Atmospheric Flow and Dispersion in Downtown Manhattan: An Application of Five Computational Fluid Dynamics Models. Bull. Am. Meteorol. Soc. 2006, 87, 1713–1726. [Google Scholar] [CrossRef] [Green Version]
- Antoniou, N.; Montazeri, H.; Wigo, H.; Neophytou, M.K.-A.; Blocken, B.; Sandberg, M. CFD and Wind-Tunnel Analysis of Outdoor Ventilation in a Real Compact Heterogeneous Urban Area: Evaluation Using “Air Delay”. Build. Environ. 2017, 126, 355–372. [Google Scholar] [CrossRef]
- Thordal, M.S.; Bennetsen, J.C.; Capra, S.; Koss, H.H.H. Towards a standard CFD setup for wind load assessment of high-rise buildings: Part 1—Benchmark of the CAARC building. J. Wind Eng. Ind. Aerodyn. 2020, 205, 104283. [Google Scholar] [CrossRef]
- Giangaspero, G.; Amerio, L.; Downie, S.; Zasso, A.; Vincent, P. High-order scale-resolving simulations of extreme wind loads on a model high-rise building. J. Wind Eng. Ind. Aerodyn. 2022, 230, 105169. [Google Scholar] [CrossRef]
- Abohela, I.; Hamza, N.; Dudek, S. Effect of roof shape, wind direction, building height and urban configuration on the energy yield and positioning of roof mounted wind turbines. Renew. Energy 2013, 50, 1106–1118. [Google Scholar] [CrossRef]
- KC, A.; Whale, J.; Urmee, T. Urban wind conditions and small wind turbines in the built environment: A review. Renew. Energy 2019, 131, 268–283. [Google Scholar] [CrossRef]
- Abd Razak, A.; Hagishima, A.; Ikegaya, N.; Tanimoto, J. Analysis of airflow over building arrays for assessment of urban wind environment. Build. Environ. 2013, 59, 56–65. [Google Scholar] [CrossRef]
- Kang, G.; Kim, J.J.; Choi, W. Computational fluid dynamics simulation of tree effects on pedestrian wind comfort in an urban area. Sustain. Cities Soc. 2020, 56, 102086. [Google Scholar] [CrossRef]
- Blocken, B.; Stathopoulos, T.; van Beeck, J. Pedestrian-Level Wind Conditions around Buildings: Review of Wind-Tunnel and CFD Techniques and their Accuracy for Wind Comfort Assessment. Build. Environ. 2016, 100, 50–81. [Google Scholar] [CrossRef]
- Wagenbrenner, N.S.; Forthofer, J.M.; Lamb, B.K.; Shannon, K.S.; Butler, B.W. Downscaling Surface Wind Predictions from Numerical Weather Prediction Models in Complex Terrain with WindNinja. Atmos. Chem. Phys. 2016, 16, 5229–5241. [Google Scholar] [CrossRef] [Green Version]
- Beaucage, P.; Brower, M.C.; Tensen, J. Evaluation of Four Numerical Wind Flow Models for Wind Resource Mapping. Wind. Energy 2014, 17, 197–208. [Google Scholar] [CrossRef]
- Grushin, A.; Tyagi, A.; Gluck, J.; Mohseni, S.; Nigam, N.; Klopfenstein, M.; Lee, R.S. GUMP: General Urban Area Microclimate Predictions Tool. In Proceedings of the AIAA Aviation 2020 Forum, Online, 15–19 June 2020. [Google Scholar] [CrossRef]
- WeatherSTEM. Available online: https://www.weatherstem.com/mesostem (accessed on 21 February 2023).
- Macchiarella, N.D.; Robbins, J.; Cashdollar, D. Rapid Virtual Object Development using Photogrammetric Imagery Obtained with Small Unmanned Aircraft Systems—Applications for Disaster Assessment and Cultural Heritage Preservation. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019; Volume AIAA 2019-1974. [Google Scholar] [CrossRef]
- Bonczak, B.; Kontokosta, C.E. Large-scale parameterization of 3D building morphology in complex urban landscapes using aerial LiDAR and city administrative data. Comput. Environ. Urban Syst. 2019, 73, a126–a142. [Google Scholar] [CrossRef]
- LiDARUSA. “Revolution 120”. 2022. Available online: https://www.lidarusa.com/revolution-120.html (accessed on 5 March 2023).
- Autodesk. Autodesk 3ds Max 2020, version 20.2.0.2345; Autodesk: San Francisco, CA, USA, 2020.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | sUAS 1 | sUAS 2 | GUMP (2-h Average) | GUMP— sUAS1 | GUMP— sUAS2 |
|---|---|---|---|---|---|
| Urban 1 | 3.07 | 0.83 | 4.96 | 1.89 | 4.13 |
| Urban 2 | 4.69 | 3.43 | 4.65 | −0.04 | 1.22 |
| Urban 3 | 2.46 | 3.25 | 4.72 | 2.26 | 1.47 |
| Urban 4 | 2.22 | 3.56 | 4.82 | 2.60 | 1.26 |
| Suburban 1 | 3.95 | 4.38 | 1.81 | −2.14 | −2.57 |
| Suburban 2 | 1.19 | 1.03 | 2.11 | 0.92 | 1.08 |
| Suburban 3 | 4.33 | 3.66 | 2.41 | −1.92 | −1.25 |
| Suburban 4 | 2.23 | 2.21 | 2.65 | 0.42 | 0.44 |
| Suburban 5 | 4.00 | 4.12 | 2.47 | −1.53 | −1.65 |
| Scenario | sUAS 1 | sUAS 2 | GUMP (2-h Average) | GUMP— sUAS1 | GUMP— sUAS2 |
|---|---|---|---|---|---|
| Urban 1 | 214.05 | 212.61 | 300.78 | 86.73 | 88.17 |
| Urban 2 | 299.41 | 289.22 | 282.38 | −17.03 | −6.84 |
| Urban 3 | 323.59 | 314.05 | 284.58 | −39.01 | −29.47 |
| Urban 4 | 297.24 | 308.43 | 305.04 | 7.80 | −3.39 |
| Suburban 1 | 282.27 | 282.26 | 275.17 | −7.10 | −7.09 |
| Suburban 2 | 270.48 | 294.81 | 291.92 | 21.44 | −2.89 |
| Suburban 3 | 306.84 | 310.34 | 297.52 | −9.32 | −12.82 |
| Suburban 4 | 310.80 | 286.57 | 304.11 | −6.69 | 17.54 |
| Suburban 5 | 301.71 | 313.47 | 296.05 | −5.66 | −17.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adkins, K.A.; Becker, W.; Ayyalasomayajula, S.; Lavenstein, S.; Vlachou, K.; Miller, D.; Compere, M.; Muthu Krishnan, A.; Macchiarella, N. Hyper-Local Weather Predictions with the Enhanced General Urban Area Microclimate Predictions Tool. Drones 2023, 7, 428. https://doi.org/10.3390/drones7070428
Adkins KA, Becker W, Ayyalasomayajula S, Lavenstein S, Vlachou K, Miller D, Compere M, Muthu Krishnan A, Macchiarella N. Hyper-Local Weather Predictions with the Enhanced General Urban Area Microclimate Predictions Tool. Drones. 2023; 7(7):428. https://doi.org/10.3390/drones7070428
Chicago/Turabian StyleAdkins, Kevin A., William Becker, Sricharan Ayyalasomayajula, Steven Lavenstein, Kleoniki Vlachou, David Miller, Marc Compere, Avinash Muthu Krishnan, and Nickolas Macchiarella. 2023. "Hyper-Local Weather Predictions with the Enhanced General Urban Area Microclimate Predictions Tool" Drones 7, no. 7: 428. https://doi.org/10.3390/drones7070428