
Free-Vibration Analysis for Truncated Uflyand–Mindlin Plate Models: An Alternative Theoretical Formulation




Abstract
:1. Introduction
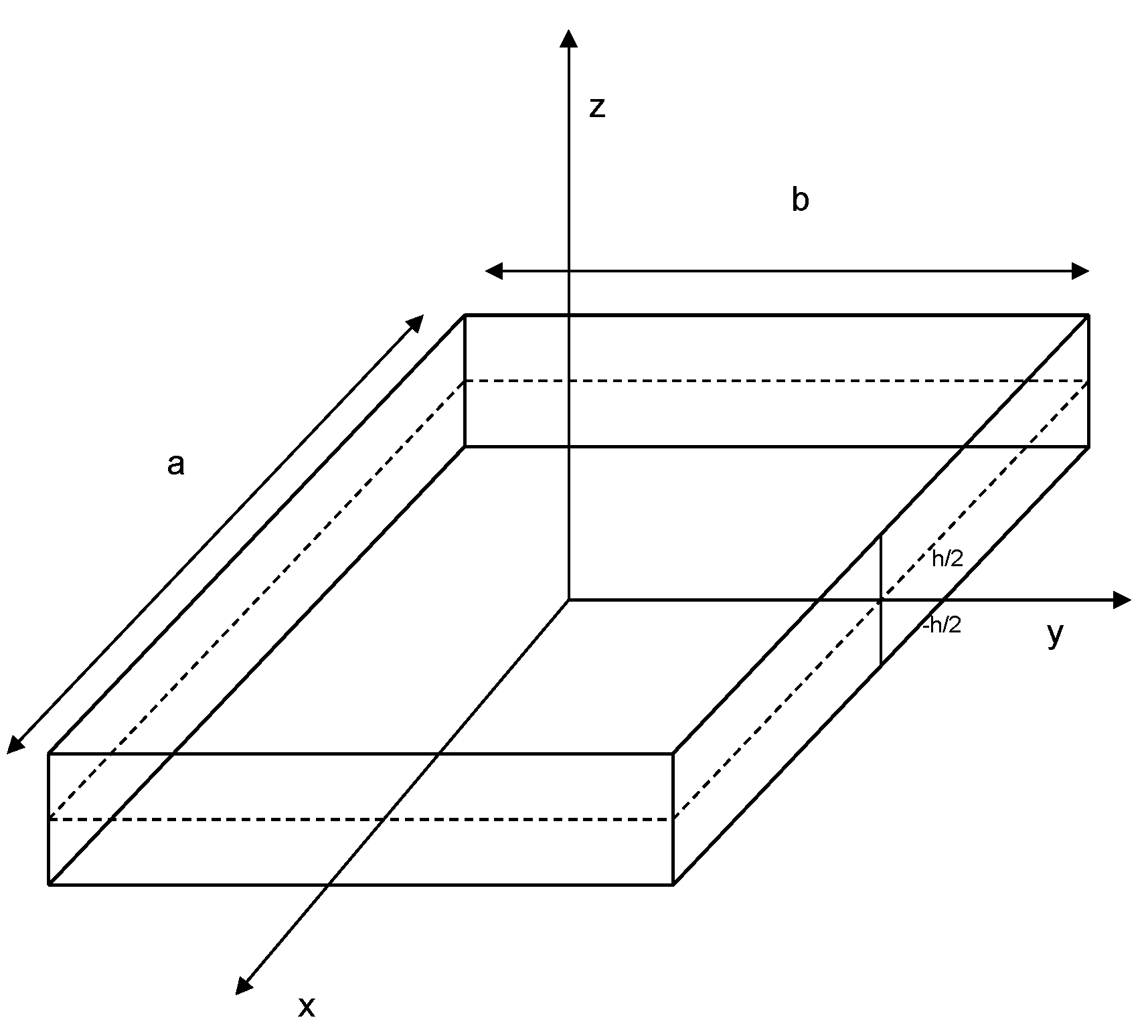
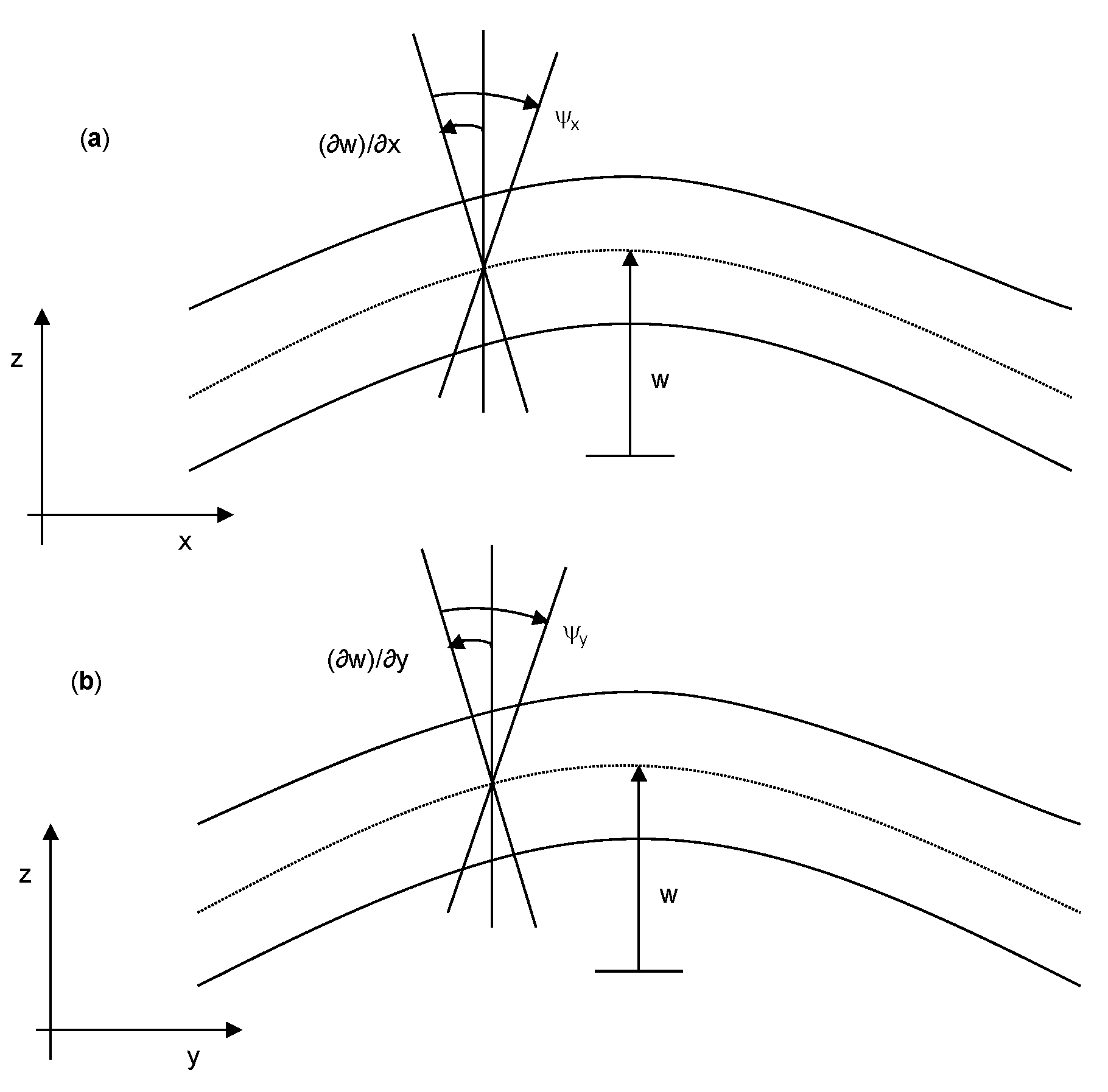
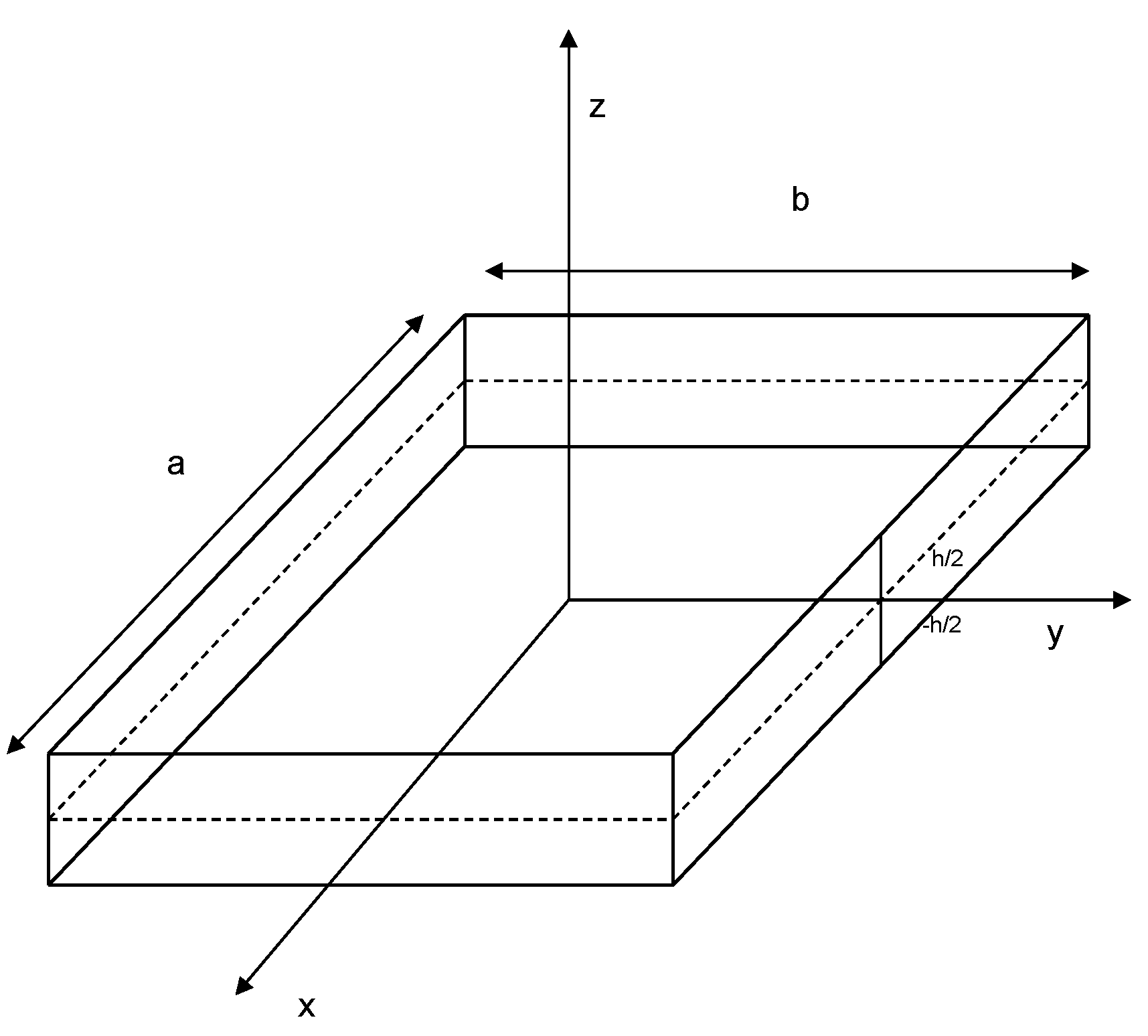
2. Mathematical Model
2.1. Pioneering and Modern Plate Studies
2.2. Direct Method
2.3. Variational Formulation
2.4. Original Uflyand–Mindlin Theory (Model I)
2.5. Uflyand–Mindlin Plate Model Based on Slope Inertia (Model II)
2.6. Truncated Uflyand–Mindlin Plate Model (Model III)
2.7. Transformation of Governing Differential Equations
3. Numerical Comparison and Discussion
3.1. Theoretical Formulation of a Rectangular Plate with Four Edges That Are Simply Supported
3.2. Numerical Example for a Rectangular Plate with Four Edges That Are Simply Supported
- -
- When the aspect ratio increases, the natural frequencies decrease;
- -
- When the thickness ratio increases, the free frequencies increase.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- MacTutor: Gustav Robert Kirchhoff. Available online: https://mathshistory.st-andrews.ac.uk/Biographies/Kirchhoff/ (accessed on 7 February 2021).
- Elzein, A. Plate Stability by Boundary Element Method: Introduction. In Historical Background; Springer: Berlin, Germany, 2011. [Google Scholar]
- Kirchhoff, G. Über das Gleichgewicht und die Bewegung einer elastischen Scheibe. Zeitschirft Für Reine und Angew. Math. 1850, 40, 51–88. (In German) [Google Scholar]
- Timoshenko, S.P. History of Strength of Materials with a Brief Account of Theory and Elasticity and Theory of Structures; McGraw-Hill: New York, NY, USA, 1953. [Google Scholar]
- Reissner, E. Reflections on the theory of elastic plates. Appl. Mech. Rev. 1985, 38, 1453–1464. [Google Scholar] [CrossRef]
- Basset, A.B. On the Extension and Flexure of Cylindrical and Spherical Thin Elastic Shells. Philos. Trans. R. Soc. Lond. (A) 1890, 181, 433–480. [Google Scholar]
- Reissner, E. On the Theory of Bending of Elastic Plates. J. Math. Phys. 1944, 23, 184–191. [Google Scholar] [CrossRef]
- Reissner, E. The Effect of Transverse Shear Deformation on the Bending of Elastic Plates. J. Appl. Mech. 1945, 67, A67–A77. [Google Scholar] [CrossRef]
- Reissner, E. On Bending of Elastic Plates. Q. Appl. Math. 1947, 5, 55–68. [Google Scholar] [CrossRef]
- Bolle, D. Contribution au problème linéaire de flexion d’une plaque èlastique, Bulletin. Tech. Suisse Rom. 1947, 73, 21–22. (In French) [Google Scholar]
- Hencky, H. Über die Berücksichtigung der Schubverzerrung in ebenen Platten. Ingenieur-Archiv. 1947, 16, 72–76. (In German) [Google Scholar] [CrossRef]
- Uflyand, Y.S. Wave Propagation by Transverse Vibrations of Beams and Plates. PMM J. Appl. Math. Mech. 1948, 12, 287–300. (In Russian) [Google Scholar]
- Mindlin, R.D. Influence of Rotatory Inertia and Shear on Flexural Motions of Isotropic, Elastic Plates. J. Appl. Mech. 1951, 18, 31–38. [Google Scholar] [CrossRef]
- Mindlin, R.D. An Introduction to the Mathematical Theory of Vibrations of Elastic Plates; US Army Signal Corps Engineering Laboratories: Fort Monmouth, NJ, USA, 1955. [Google Scholar]
- Mindlin, R.D. An Introduction to the Mathematical Theory of Vibration of Elastic Plates; Yang, J., Ed.; World Scientific: Singapore, 2006; see above for original report by Mindlin, 1955. [Google Scholar]
- Wojnar, R. Stress Equations of Motion for Uflyand-Mindlin Plate. Bull. L’ Acad. Pol. Des. Sci. Ser. Des. Sci. Tech. 1979, 27, 731–740. [Google Scholar]
- Wojnar, R. Uflyand-Mindlin’s Plate Equations in Thermoelasticity with One Relaxation Times. Bull. De L’Académie Pol. Des. Sci. Série Des. Sci. Tech. 1985, 33, 325–349. [Google Scholar]
- Rossikhin, Y.A.; Shitikova, M.V. About Shock Interaction of Elastic Bodies with Pseudo-Isotropic Uflyand-Mindlin Plates. In Proceedings of the International Symposium on Impact Engineering, Sendai, Japan, 2–4 November 1992; pp. 623–628. [Google Scholar]
- Rossikhin, Y.A.; Shitikova, M. Problem of the Impact Interaction of an Elastic Rod with a Uflyand-Mindlin Plate. Int. Appl. Mech. 1993, 29, 118–125. [Google Scholar] [CrossRef]
- Loktev, A.A. Dynamic Contact of a Spherical Center and Prestressed Orthotropic Uflyand-Mindlin Plate. Acta Mech. 2011, 222, 17–25. [Google Scholar] [CrossRef]
- Elishakoff, I. Handbook on Timoshenko-Ehrenfest Beam and Uflyand-Mindlin Plate Theories; World Scientific: Singapore, 2020. [Google Scholar]
- Elishakoff, I. Generalization of the Bolotin’s Dynamic Edge-Effect Method for Vibration Analysis of Mindlin Plates. In Proceedings of the 1994 National Conference on Noise Control Engineering, Fort Lauderdale, FL, USA, 1–4 May 1994; pp. 911–916. [Google Scholar]
- Elishakoff, I.; Kaplunov, J.; Nolde, E. Celebrating the centenary of Timoshenko’s study of effects of shear deformation and rotary inertia. Appl. Mech. Rev. 2015, 67, 060802. [Google Scholar] [CrossRef]
- Erbaş, B.; Kaplunov, J.; Elishakoff, I. Asymptotic derivation of a refined equation for an elastic beam resting on a Winkler foundation. Math. Mech. Solids 2022, 27, 1638–1648. [Google Scholar] [CrossRef]
- Goldenveiser, A.L.; Kaplunov, J.D.; Nolde, E.V. On Timoshenko-Reissner Type Theories of Plates and Shells. Int. J. Solids Struct. 1993, 30, 675–694. [Google Scholar] [CrossRef]
- Kaplunov, J.D.; Kossovich, L.T.; Nolde, E.V. Dynamics of Thin Walled Elastic Bodies; Academic Press: San Diego, CA, USA, 1998. [Google Scholar]
- Falsone, G.; Settineri, D.; Elishakoff, I. A New Locking-Free Finite Element Method Based on More Consistent Version of Mindlin Plate Equation. Arch. Appl. Mech. 2014, 84, 967–983. [Google Scholar] [CrossRef]
- Falsone, G.; Settineri, D.; ElishakoffI, I. A New Class of Interdependent Shape Polynomials for the Finite Element Dynamic Analysis of Mindlin Plate and Timoshenko Beam. Meccanica 2015, 50, 767–780. [Google Scholar] [CrossRef]
- Häggblad, B.; Bathe, K.J. Specifications of Boundary Conditions for Reissner/Mindlin Plate Bending Finite Elements. Int. J. Num. Meth. Eng. 1990, 30, 981–1011. [Google Scholar] [CrossRef]
- Brezzi, F.; Fortin, M.; Stenberg, R. Error Analysis of Mixed-Interpolated Elements for Reissner-Mindlin Plates. Math. Models Methods Appl. Sci. 1991, 1, 125–151. [Google Scholar] [CrossRef]
- Dolbow, J.; Moës, N.; Belytschko, T. Modeling Fracture in Mindlin-Reissner Plates with the Extended Finite Element Method. Int. J. Solids Struct. 2000, 37, 7161–7183. [Google Scholar] [CrossRef]
- Shimpi, R.P. Refined Plate Theory and its Variants. AIAA J. 2002, 40, 137–146. [Google Scholar] [CrossRef]
- Reddy, J.N. A refined non-linear theory of plates with transverse shear deformation. Int. J. Solids Struct. 1984, 20, 881–896. [Google Scholar] [CrossRef]
- Levinson, M. An accurate simple theory of statics and dynamics of elastic plates. Mech. Res. Commun. 1980, 7, 343–350. [Google Scholar] [CrossRef]
- De Rosa, M.A.; Lippiello, M. Free vibrations of simply supported double plate on two models of elastic soils. Int. J. Numer. Anal. Meth. Geomech. 2009, 33, 33153. [Google Scholar] [CrossRef]
- Irschik, H. Membrane-Type Eigenmotions of Mindlin Plates. Acta Mech. 1985, 55, 1–20. [Google Scholar] [CrossRef]
- Grigolyuk, E.I.; Selezov, I.T. Nonclassical Theory of Vibrations of Rods, Plates, and Shells; VINITI Publishing: Moscow, Russia, 1973. (In Russian) [Google Scholar]
- Gehring, F. De Aequationibus Differentialibus, Quibus Aequilibrium et Motus Laminae Crystallinae Definiunter; Schultze: Berlin, Germany, 1860. [Google Scholar]
- Kirchhoff, G. Vorlesungen über Mathematische Physik, Band I, Mechanik; Teubner: Leipzig, Germany, 1876. (In German) [Google Scholar]
- Germain, P. Mécanique des Milieux Continus; Masson Editeurs: Paris, France, 1962. (In French) [Google Scholar]
- Elishakoff, I.; Hache, F.; Challamel, N. Vibrations of asymptotically and variationally based Uflyand-Mindlin plate models. Int. J. Eng. Sci. 2017, 116, 58–73. [Google Scholar] [CrossRef]
- Hache, F.; Elishakoff, I.; Challamel, N. Free vibration analysis of plates taking into account rotary inertia and shear deformation via three alternative theories: A Lévy-type solution. Acta Mech. 2017, 228, 3633–3655. [Google Scholar] [CrossRef]
- Wolfram, S. The Mathematica 8; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Navier, C.L.M.H. Extrait des recherches sur la flexion des plans élastiques. Bull. Sci. Soc. Philomarhiques Paris 1823, 5, 95–102. [Google Scholar]
- Wang, C.M.; Reddy, J.N.; Lee, K.H. Shear Deformable Beams and Plates; Elsevier Science Ltd.: Oxford, UK, 2000. [Google Scholar]
- Rosenfeld, L. Biography. In Dictionary of Scientific Biography; Charles Scribner’s Sons: New York, NY, USA, 1970–1990. [Google Scholar]
- Shamrovskii, A.D. Asymptotic Group Analysis of the Differential Equations of the Theory of Elasticity; Zaporozhie State Engineering Academy: Zaporozhie, Ukraine, 1997. (In Russian) [Google Scholar]
- Andrianov, I.V.; Awrejcewicz, J. Asymptotic Solution of the Theory of Shells Boundary Value Problem. Math. Probl. Eng. 2007, 2007, 82348. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| = 0.01 | = 0.1 | = 0.2 | |
|---|---|---|---|
| 1 | 19.732 | 19.077 | 17.429 |
| 49.304 | 45.492 | 37.773 | |
| 78.845 | 69.715 | 54.089 | |
| 98.522 | 84.838 | 63.529 | |
| 128.011 | 106.207 | 76.167 | |
| 167.282 | 132.613 | 90.953 | |
| 177.091 | 138.889 | 94.363 | |
| 196.698 | 151.092 | 100.901 | |
| 245.657 | 179.788 | 115.879 | |
| 255.439 | 185.249 | 118.678 | |
| 2 | 12.326 | 11.373 | 9.443 |
| 19.711 | 17.429 | 13.522 | |
| 32.003 | 26.552 | 19.042 | |
| 41.820 | 33.153 | 22.738 | |
| 49.175 | 37.773 | 25.225 | |
| 61.414 | 44.947 | 28.969 | |
| 71.191 | 50.285 | 31.687 | |
| 78.514 | 54.089 | 33.596 | |
| 90.703 | 60.098 | 36.575 | |
| 98.006 | 63.529 | 38.261 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Rosa, M.A.; Elishakoff, I.; Lippiello, M. Free-Vibration Analysis for Truncated Uflyand–Mindlin Plate Models: An Alternative Theoretical Formulation. Vibration 2024, 7, 264-280. https://doi.org/10.3390/vibration7010014
De Rosa MA, Elishakoff I, Lippiello M. Free-Vibration Analysis for Truncated Uflyand–Mindlin Plate Models: An Alternative Theoretical Formulation. Vibration. 2024; 7(1):264-280. https://doi.org/10.3390/vibration7010014
Chicago/Turabian StyleDe Rosa, Maria Anna, Isaac Elishakoff, and Maria Lippiello. 2024. "Free-Vibration Analysis for Truncated Uflyand–Mindlin Plate Models: An Alternative Theoretical Formulation" Vibration 7, no. 1: 264-280. https://doi.org/10.3390/vibration7010014
APA StyleDe Rosa, M. A., Elishakoff, I., & Lippiello, M. (2024). Free-Vibration Analysis for Truncated Uflyand–Mindlin Plate Models: An Alternative Theoretical Formulation. Vibration, 7(1), 264-280. https://doi.org/10.3390/vibration7010014