


Computing Safe Stop Trajectories for Autonomous Driving Utilizing Clustering and Parametric Optimization


Abstract
1. Introduction
1.1. Classification in Existing Approaches
1.2. Contributions
1.3. Outline
2. Nonlinear Optimization and Parametric Sensitivity Analysis
- 1.
- .
- 2.
- The active set does not change, i.e., .
- 3.
- fulfills LICQ (Definition 4).
- 4.
- is a local minimum of NLP with Lagrangian multipliers .
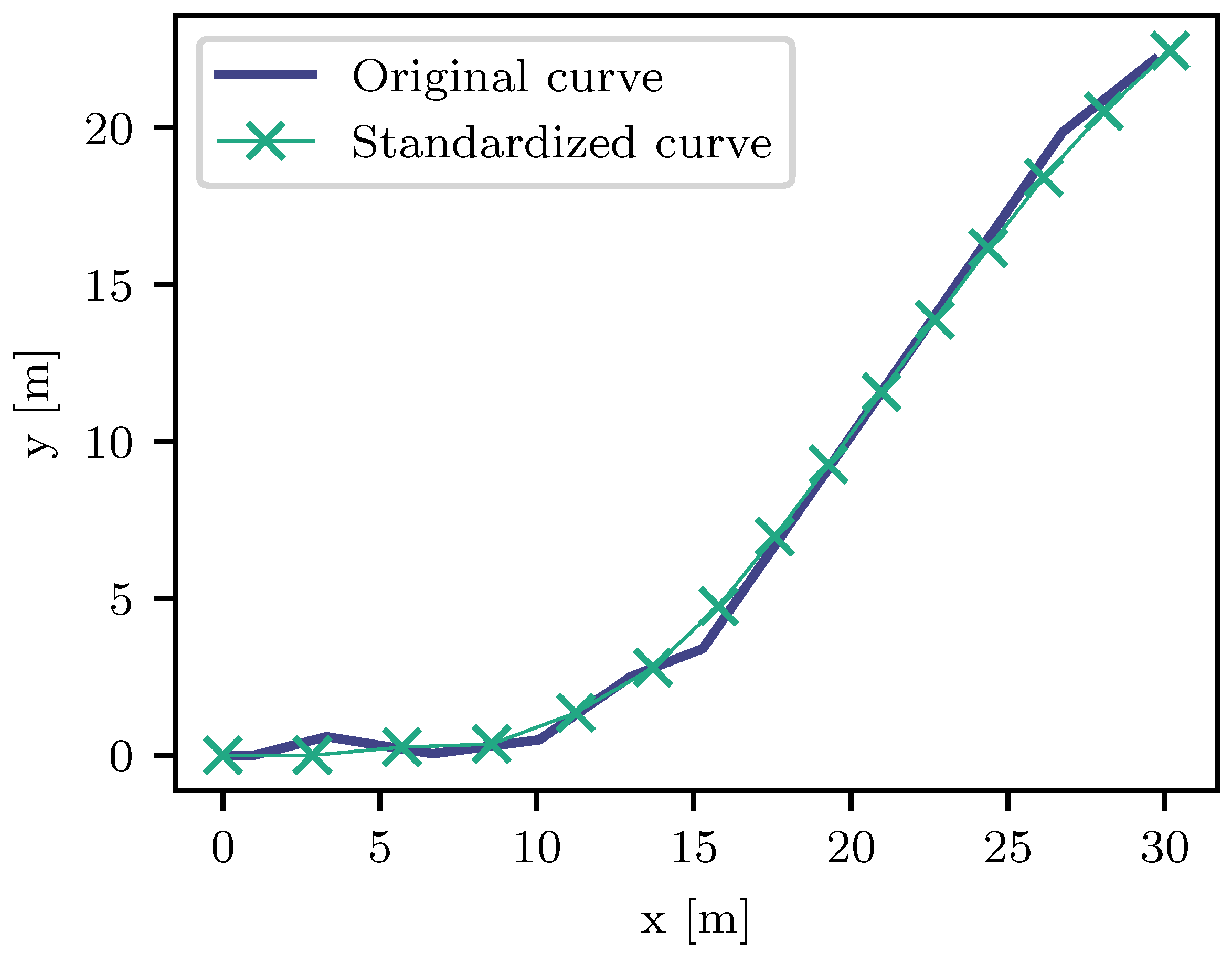
3. Identifying Traffic Situations with Fréchet Clustering
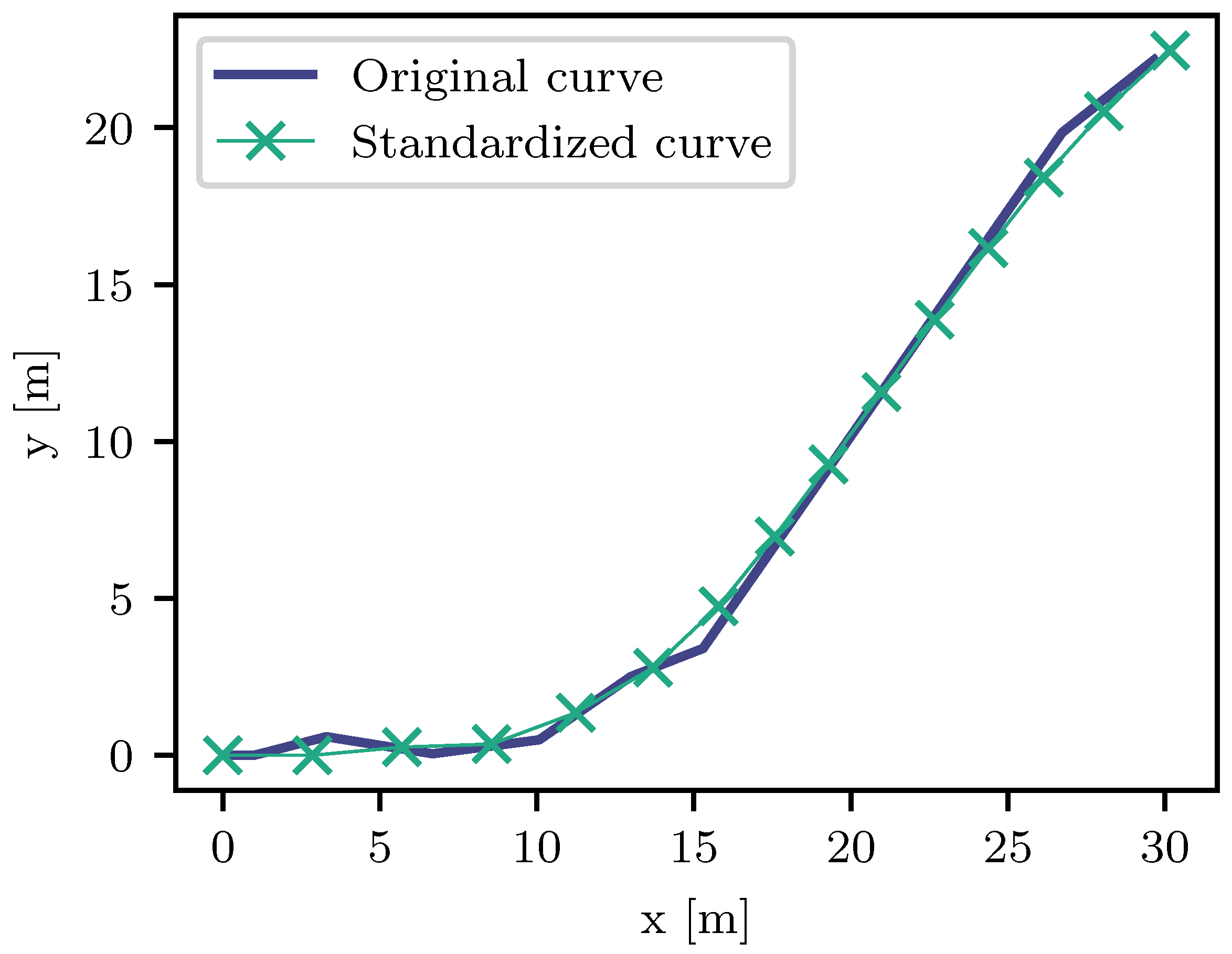
- Adjacent vertices have a fixed distance, i.e.,
- The start point is the origin of the coordinate system, i.e., .
- The first segment has the same orientation as the x-axis, i.e., .
- Two adjacent segments shall have a similar orientation, i.e.,where returns the polar angle of the point .
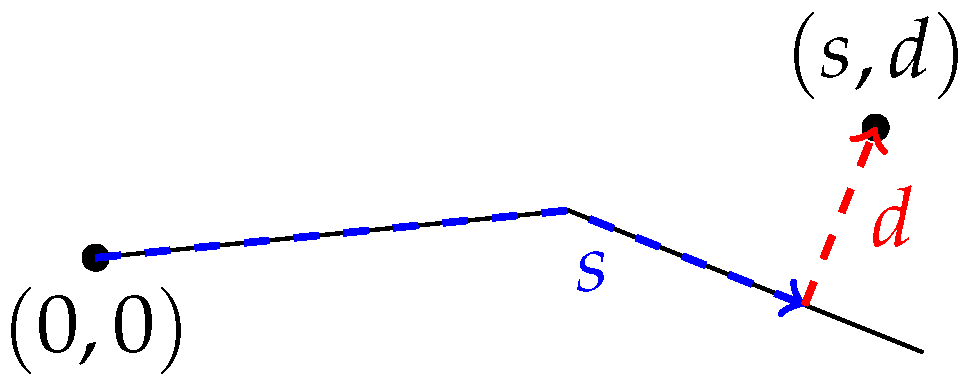
4. Trajectory Computation Methods
4.1. Problem Formulation for Trajectory Computation
| Algorithm 1 Conversion from Frenet to Cartesian coordinates |
Inputs:
|
- is the position in Cartesian coordinates in
- is the yaw angle in
- is the steering angle in
- is the speed in
- is the acceleration in
- is the steering angle velocity in
- is the jerk in
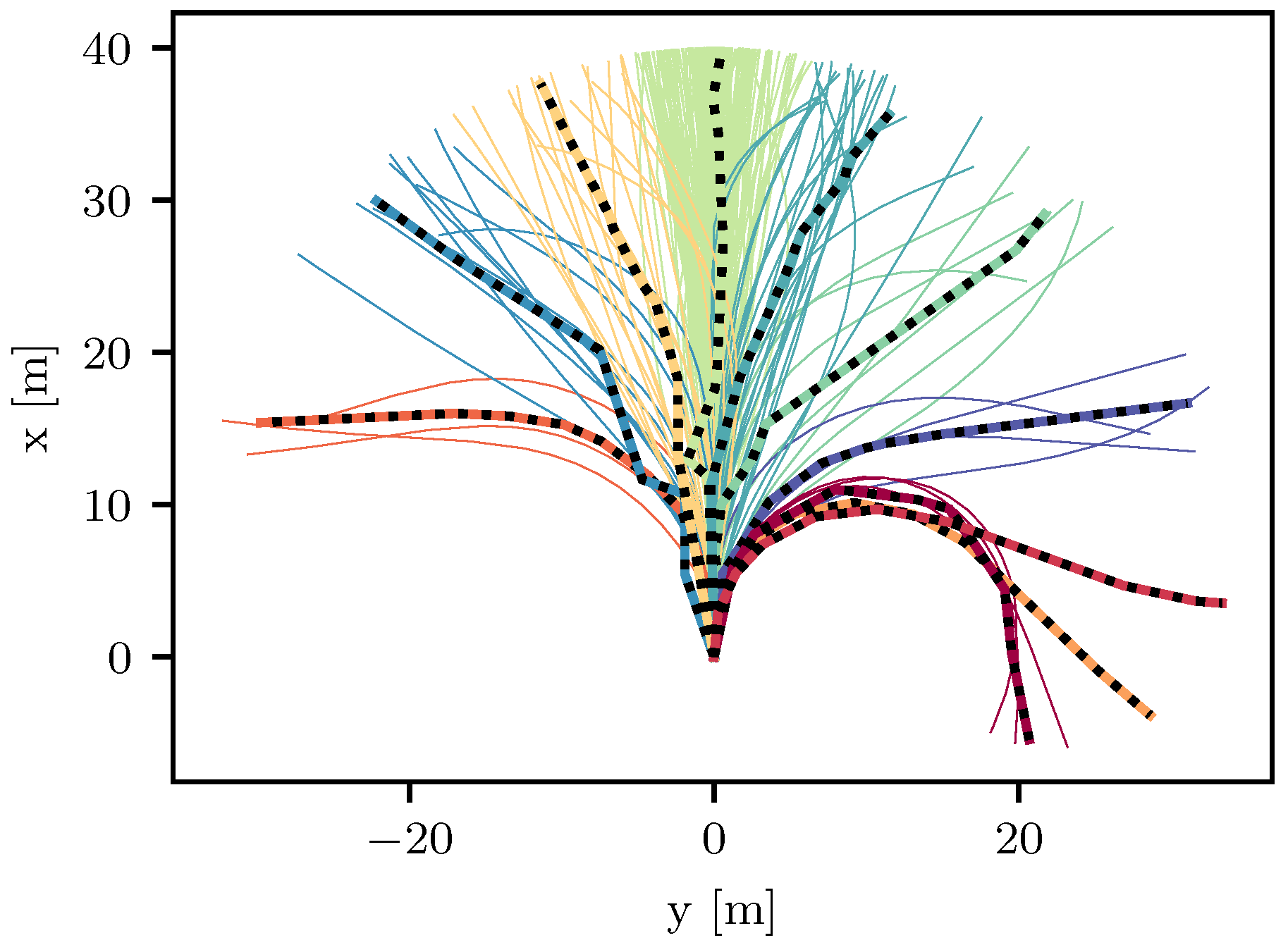
4.2. Trajectory Precomputation for Cluster Centers
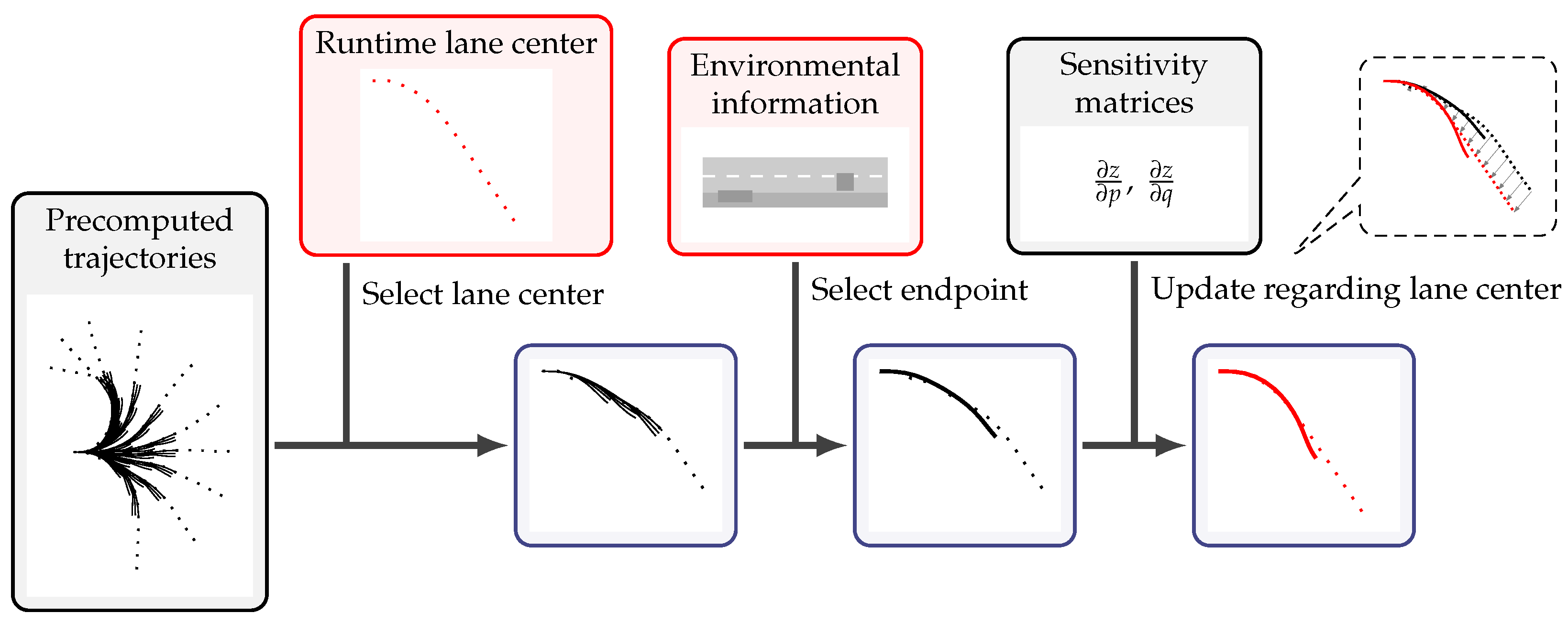
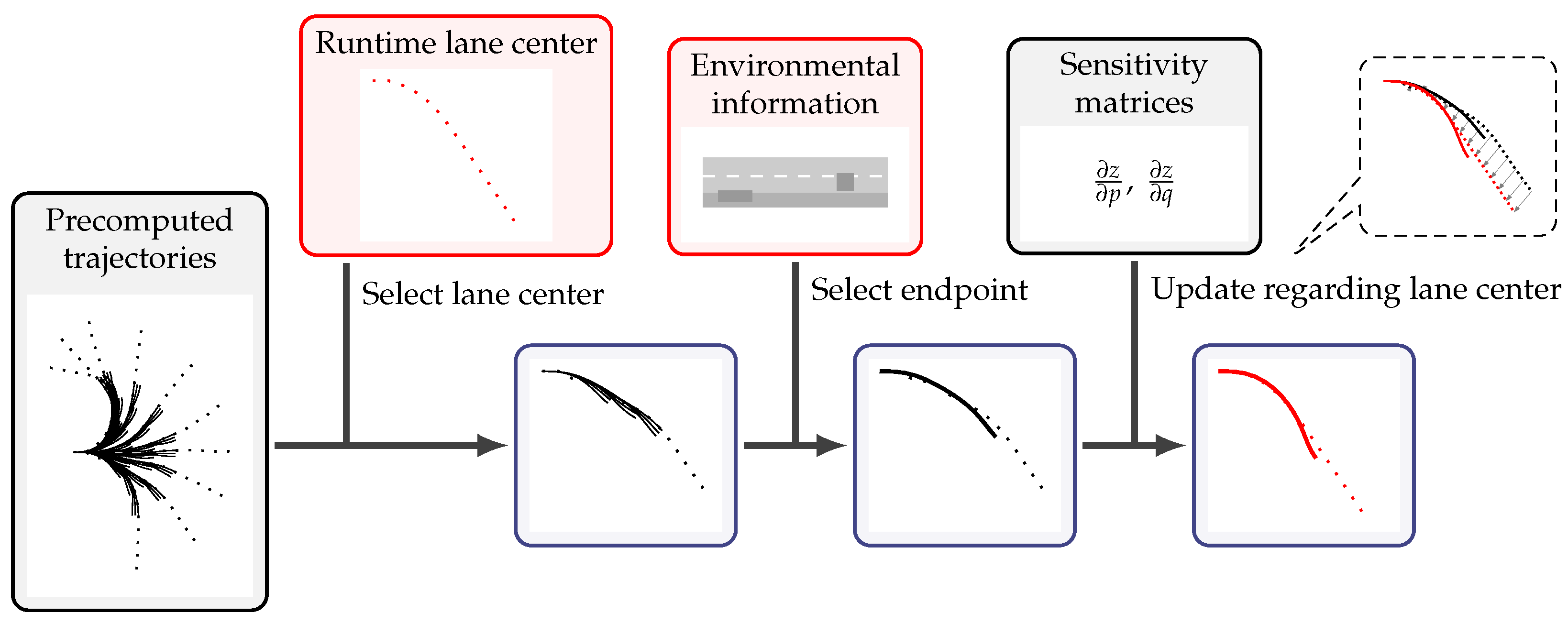
4.3. Trajectory Computation for Arbitrary Lane Centers at Runtime
| Algorithm 2 Sensitivity-based trajectory computation with feasibility correction |
Inputs:
|
5. Results
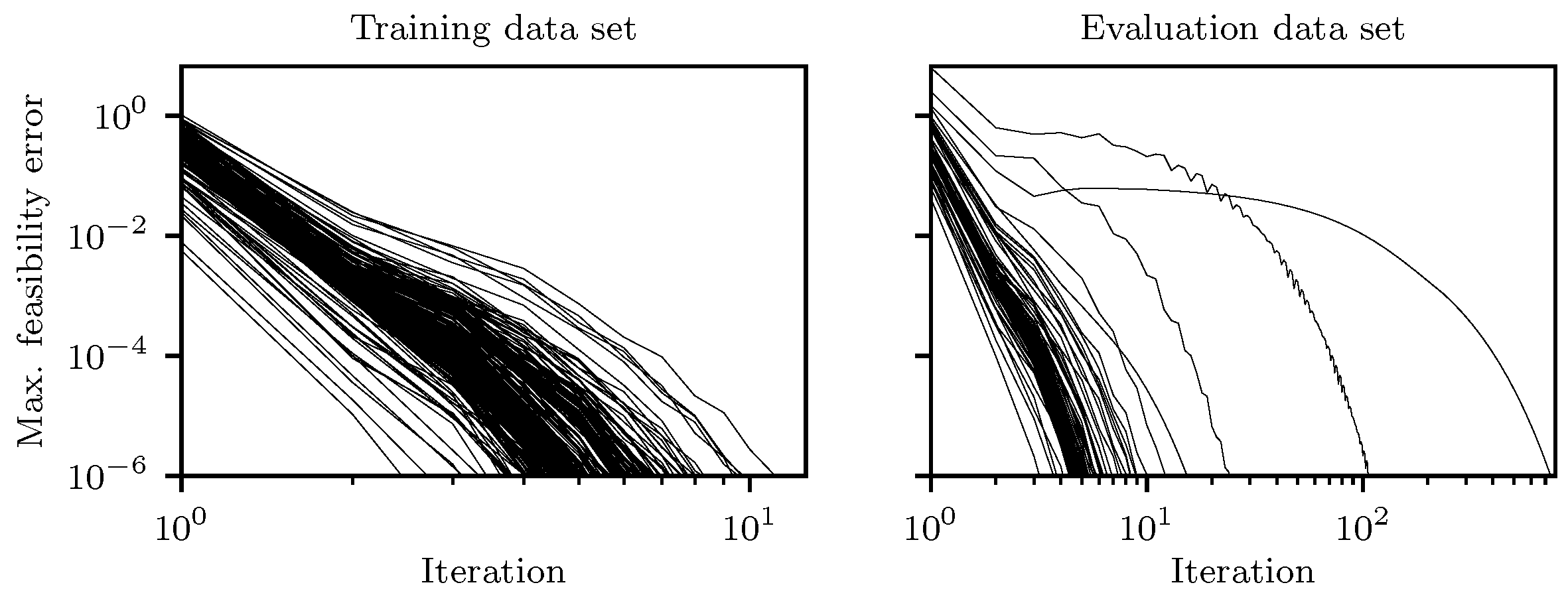
5.1. Convergence of the Feasibility Correction
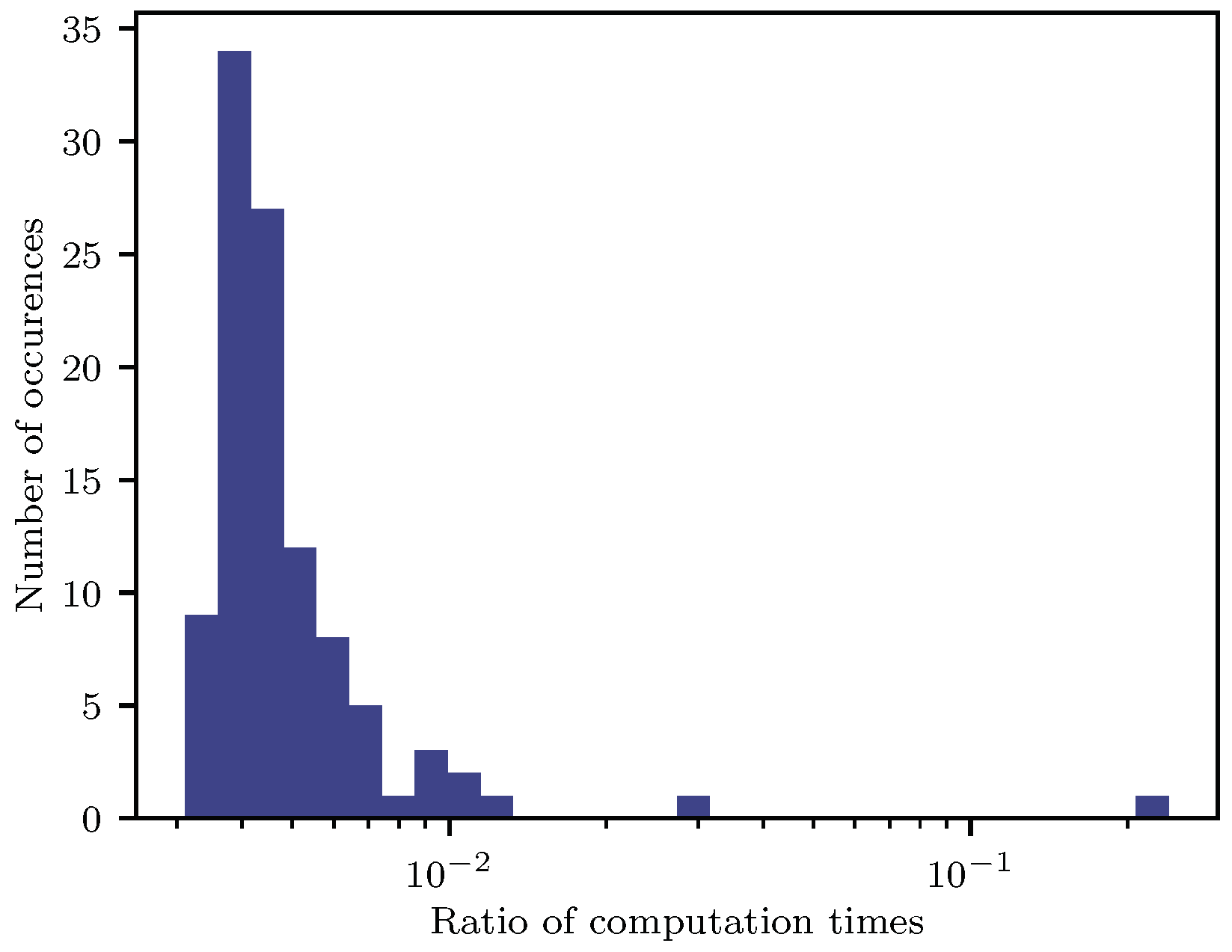
5.2. Comparison to Re-Optimization
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kriebitz, A.; Max, R.; Lütge, C. The German Act on Autonomous Driving: Why Ethics Still Matters. Philos. Technol. 2022, 35, 29. [Google Scholar] [CrossRef] [PubMed]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Badue, C.; Guidolini, R.; Carneiro, R.V.; Azevedo, P.; Cardoso, V.B.; Forechi, A.; Jesus, L.; Berriel, R.; Paixão, T.M.; Mutz, F.; et al. Self-driving cars: A survey. Expert Syst. Appl. 2021, 165, 113816. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Sharma, O.; Sahoo, N.; Puhan, N. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey. Eng. Appl. Artif. Intell. 2021, 101, 104211. [Google Scholar] [CrossRef]
- Boggio, M.; Novara, C.; Taragna, M. Trajectory planning and control for autonomous vehicles: A “fast” data-aided NMPC approach. Eur. J. Control 2023, 74, 100857. [Google Scholar] [CrossRef]
- Dempster, R.; Al-Sharman, M.; Rayside, D.; Melek, W. Real-Time Unified Trajectory Planning and Optimal Control for Urban Autonomous Driving Under Static and Dynamic Obstacle Constraints. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 10139–10145. [Google Scholar] [CrossRef]
- Li, G.; Zhang, X.; Guo, H.; Lenzo, B.; Guo, N. Real-Time Optimal Trajectory Planning for Autonomous Driving with Collision Avoidance Using Convex Optimization. Automot. Innov. 2023, 6, 481–491. [Google Scholar] [CrossRef]
- Meng, Y.; Wu, Y.; Gu, Q.; Liu, L. A Decoupled Trajectory Planning Framework Based on the Integration of Lattice Searching and Convex Optimization. IEEE Access 2019, 7, 130530–130551. [Google Scholar] [CrossRef]
- Zhang, X.; Liniger, A.; Borrelli, F. Optimization-Based Collision Avoidance. IEEE Trans. Control Syst. Technol. 2021, 29, 972–983. [Google Scholar] [CrossRef]
- Marcucci, T.; Petersen, M.; von Wrangel, D.; Tedrake, R. Motion planning around obstacles with convex optimization. Sci. Robot. 2023, 8, eadf7843. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Maierhofer, S.; Althoff, M. Sampling-Based Trajectory Repairing for Autonomous Vehicles. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 572–579. [Google Scholar] [CrossRef]
- Meyer, H.F. Echtzeitoptimierung für Ausweichtrajektorien mittels der Sensitivitätsanalyse eines parametergestörten nichtlinearen Optimierungsproblems. Ph.D. Thesis, Universität Bremen, Bremen, Germany, 2016. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; Zhang, Y.; Rasekhipour, Y.; Cao, D. Crash Mitigation in Motion Planning for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3313–3323. [Google Scholar] [CrossRef]
- Salvado, J.; Custódio, L.; Hess, D. Contingency planning for automated vehicles. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 2853–2858. [Google Scholar] [CrossRef]
- Wang, L.; Wu, Z.; Li, J.; Stiller, C. Real-Time Safe Stop Trajectory Planning via Multidimensional Hybrid A*-Algorithm. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Svensson, L.; Masson, L.; Mohan, N.; Ward, E.; Brenden, A.P.; Feng, L.; Törngren, M. Safe Stop Trajectory Planning for Highly Automated Vehicles: An Optimal Control Problem Formulation. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 517–522. [Google Scholar] [CrossRef]
- Büskens, C. Echtzeitoptimierung und Echtzeitoptimalsteuerung parametergestörter Probleme. Habilitation’s Thesis, Universität Bayreuth, Bayreuth, Germany, 2002. [Google Scholar]
- Knauer, M.; Büskens, C. Real-Time Optimal Control Using TransWORHP and WORHP Zen. In Modeling and Optimization in Space Engineering: State of the Art and New Challenges; Fasano, G., Pintér, J.D., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 211–232. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Theory of Constrained Optimization. In Numerical Optimization; Springer: New York, NY, USA, 2006; pp. 304–354. [Google Scholar] [CrossRef]
- Fletcher, R. Practical Methods of Optimization, 2nd ed.; John Wiley & Sons: Chichester, UK, 2000. [Google Scholar] [CrossRef]
- Grippo, L.; Sciandrone, M. Introduction to Methods for Nonlinear Optimization; Springer International Publishing: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- Pata, V. Fixed Point Theorems and Applications; Springer: Cham, Switzerland, 2019; pp. 75–80. [Google Scholar] [CrossRef]
- Fiacco, A.V. Sensitivity analysis for nonlinear programming using penalty methods. Math. Program. 1976, 10, 287–311. [Google Scholar] [CrossRef]
- Spellucci, P. Numerische Verfahren der Nichtlinearen Optimierung; Birkhäuser: Basel, Switzerland, 1993; p. 79. [Google Scholar] [CrossRef]
- Bringmann, K.; Künnemann, M.; Nusser, A. Walking the Dog Fast in Practice: Algorithm Engineering of the Fréchet Distance. J. Comput. Geom. 2021, 12, 70–108. [Google Scholar] [CrossRef]
- Alt, H.; Godau, M. Computing the Fréchet Distance between Two Polygonal Curves. Int. J. Comput. Geom. Appl. 1995, 5, 75–91. [Google Scholar] [CrossRef]
- Buchin, K.; Driemel, A.; van de L’Isle, N.; Nusser, A. klcluster: Center-Based Clustering of Trajectories. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019; pp. 496–499. [Google Scholar] [CrossRef]
- Ahmed, M.; Seraj, R.; Islam, S.M.S. The k-means Algorithm: A Comprehensive Survey and Performance Evaluation. Electronics 2020, 9, 1295. [Google Scholar] [CrossRef]
- Clemens, J.; Wellhausen, C.; Koller, T.L.; Frese, U.; Schill, K. Kalman Filter with Moving Reference for Jump-Free, Multi-Sensor Odometry with Application in Autonomous Driving. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020. [Google Scholar] [CrossRef]
- Langhorst, J. Rearranged and Subdivided Track Recording of a car within a Suburban Environment; Mendeley Data; V1. 2023. Available online: https://doi.org/10.17632/6vw8h8yf2t.1 (accessed on 22 December 2023).
- Höffmann, M.; Patel, S.; Büskens, C. Weight-Optimized NURBS Curves: Headland Paths for Nonholonomic Field Robots. In Proceedings of the 2022 IEEE 8th International Conference on Automation, Robotics and Applications (ICARA), Prague, Czech Republic, 18–20 February 2022; pp. 81–85. [Google Scholar] [CrossRef]
- Werling, M.; Ziegler, J.; Kammel, S.; Thrun, S. Optimal trajectory generation for dynamic street scenarios in a Frenét Frame. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 987–993. [Google Scholar] [CrossRef]
- Polack, P.; Altché, F.; d’Andréa Novel, B.; de La Fortelle, A. The kinematic bicycle model: A consistent model for planning feasible trajectories for autonomous vehicles? In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017; pp. 812–818. [Google Scholar] [CrossRef]
- Folkers, A.; Wellhausen, C.; Rick, M.; Li, X.; Evers, L.; Schwarting, V.; Clemens, J.; Dittmann, P.; Shubbak, M.; Bustert, T.; et al. The OPA3L System and Testconcept for Urban Autonomous Driving. In Proceedings of the 25th IEEE International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 1949–1956. [Google Scholar] [CrossRef]
- Betts, J.T. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010; pp. 129–134. [Google Scholar]
- Dubins, L.E. On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Walker, A. Dubins-Curves: An Open Implementation of Shortest Paths for the Forward Only Car. Version from 14 March 2018. Available online: https://github.com/AndrewWalker/Dubins-Curves (accessed on 27 April 2023).
- Breuer, S.; Rohrbach-Kerl, A. Fahrzeugdynamik: Mechanik des bewegten Fahrzeugs; Springer Vieweg: Wiesbaden, Germany, 2015; p. 145. [Google Scholar] [CrossRef]
- Büskens, C.; Wassel, D. The ESA NLP Solver WORHP. In Modeling and Optimization in Space Engineering; Fasano, G., Pintér, J.D., Eds.; Springer: New York, NY, USA, 2013; pp. 85–110. [Google Scholar] [CrossRef]
- Bhattacharya, P.; Gavrilova, M.L. Voronoi diagram in optimal path planning. In Proceedings of the 4th International Symposium on Voronoi Diagrams in Science and Engineering (ISVD), Pontypridd, UK, 9–11 July 2007; pp. 38–47. [Google Scholar] [CrossRef]
- Ferry, M.W.; Gill, P.E.; Wong, E.; Zhang, M. A class of projected-search methods for bound-constrained optimization. Optim. Methods Softw. 2023. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Mean of Max. Absolute Difference per Trajectory | Variance in Max. Absolute Difference per Trajectory | Value Range |
|---|---|---|---|
| end time | 0.015 | 4 × | [5.3, 6.5] |
| x-position | 0.025 | 2 × | [−0.8, 25.1] |
| y-position | 0.029 | 8 × | [−17.2, 20.9] |
| yaw | 0.004 | 1 × | [−1.6, 2.7] |
| steering angle | 0.004 | 6 × | [−0.3, 0.6] |
| velocity | 0.031 | 8 × | [0.0, 8.0] |
| acceleration | 0.027 | 5 × | [−2.7, 0.0] |
| steering angle velocity | 0.009 | 4 × | [−0.7, 1.2] |
| jerk | 0.048 | 1 × | [−1.4, 4.1] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Langhorst, J.; Chan, K.W.; Meerpohl, C.; Büskens, C. Computing Safe Stop Trajectories for Autonomous Driving Utilizing Clustering and Parametric Optimization. Vehicles 2024, 6, 590-610. https://doi.org/10.3390/vehicles6020027
Langhorst J, Chan KW, Meerpohl C, Büskens C. Computing Safe Stop Trajectories for Autonomous Driving Utilizing Clustering and Parametric Optimization. Vehicles. 2024; 6(2):590-610. https://doi.org/10.3390/vehicles6020027
Chicago/Turabian StyleLanghorst, Johannes, Kai Wah Chan, Christian Meerpohl, and Christof Büskens. 2024. "Computing Safe Stop Trajectories for Autonomous Driving Utilizing Clustering and Parametric Optimization" Vehicles 6, no. 2: 590-610. https://doi.org/10.3390/vehicles6020027
APA StyleLanghorst, J., Chan, K. W., Meerpohl, C., & Büskens, C. (2024). Computing Safe Stop Trajectories for Autonomous Driving Utilizing Clustering and Parametric Optimization. Vehicles, 6(2), 590-610. https://doi.org/10.3390/vehicles6020027