Nonrigid Medical Image Registration Using an Information Theoretic Measure Based on Arimoto Entropy with Gradient Distributions

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Shannon Entropy and Mutual Information
2.2. Arimoto Entropy
2.3. Jensen Arimoto Divergence
2.4. Gradient Distributions Distance
3. Description of Proposed Nonrigid Registration Method
3.1. Formulation
3.2. Transformation Model
3.3. Registration Criteria
3.4. Optimization
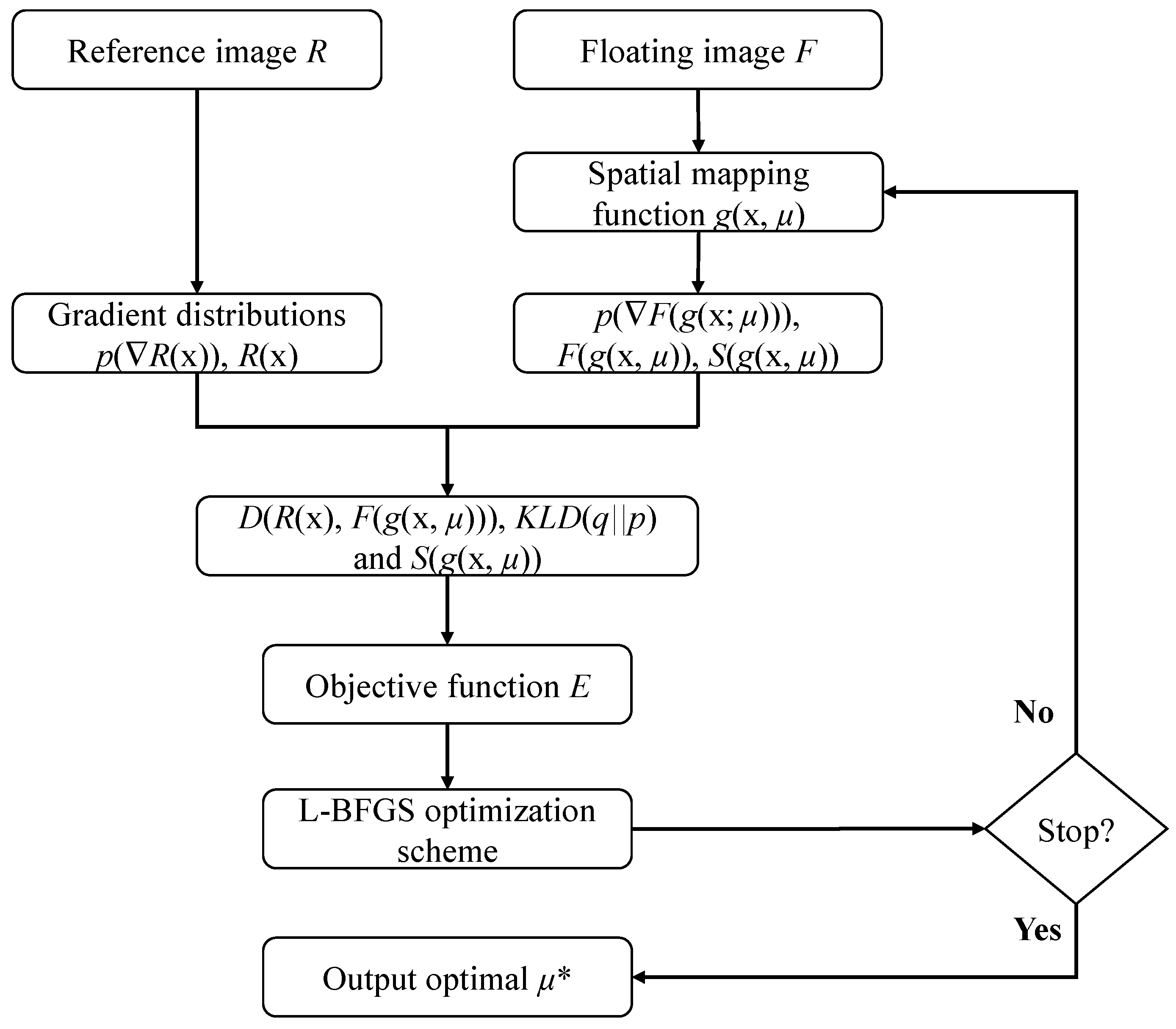
| Algorithm 1. Nonrigid medical image registration with gradient distributions |
| Input: Reference image R, floating image F Output: Optimal deformation parameters μ* Set λ1, λ2, NMAX, α, M, N, δ, ε Compute the gradient of R, denote as ∇R(x) and gradient distributions p(∇R(x)) Initialize deformation parameters μ(0), iteration k = 0, F(g(x; μ(0))) = F, E(μ(0)) = 0 While |E(μ(k + 1)) − E(μ(k))|> threshold ε or k < =NMAX Obtain the deformed float image F(g(x; μ(k+1))) and the regularization S(g(x, μ(k + 1))) Compute ∇F(g(x; μ(k + 1))) and gradient distributions q(∇F(g(x; μ(k + 1)))) Estimate the dissimilarity measure D and gradient distributions distance KLD Calculate objective function E(μ(k + 1)) = D(R(x), F(g(x; μ(k + 1)))) + KLD(q(k + 1)||p) + S(g(x, μ(k + 1))) μ(k + 1) =μ(k) − (H(k)) −1·∇E(μ(k)) k = k + 1 end |
Derivative of the Objective Function
4. Experiments and Results
4.1. Experimental Data
4.2. Nonrigid Registration of Simulated Brain Images
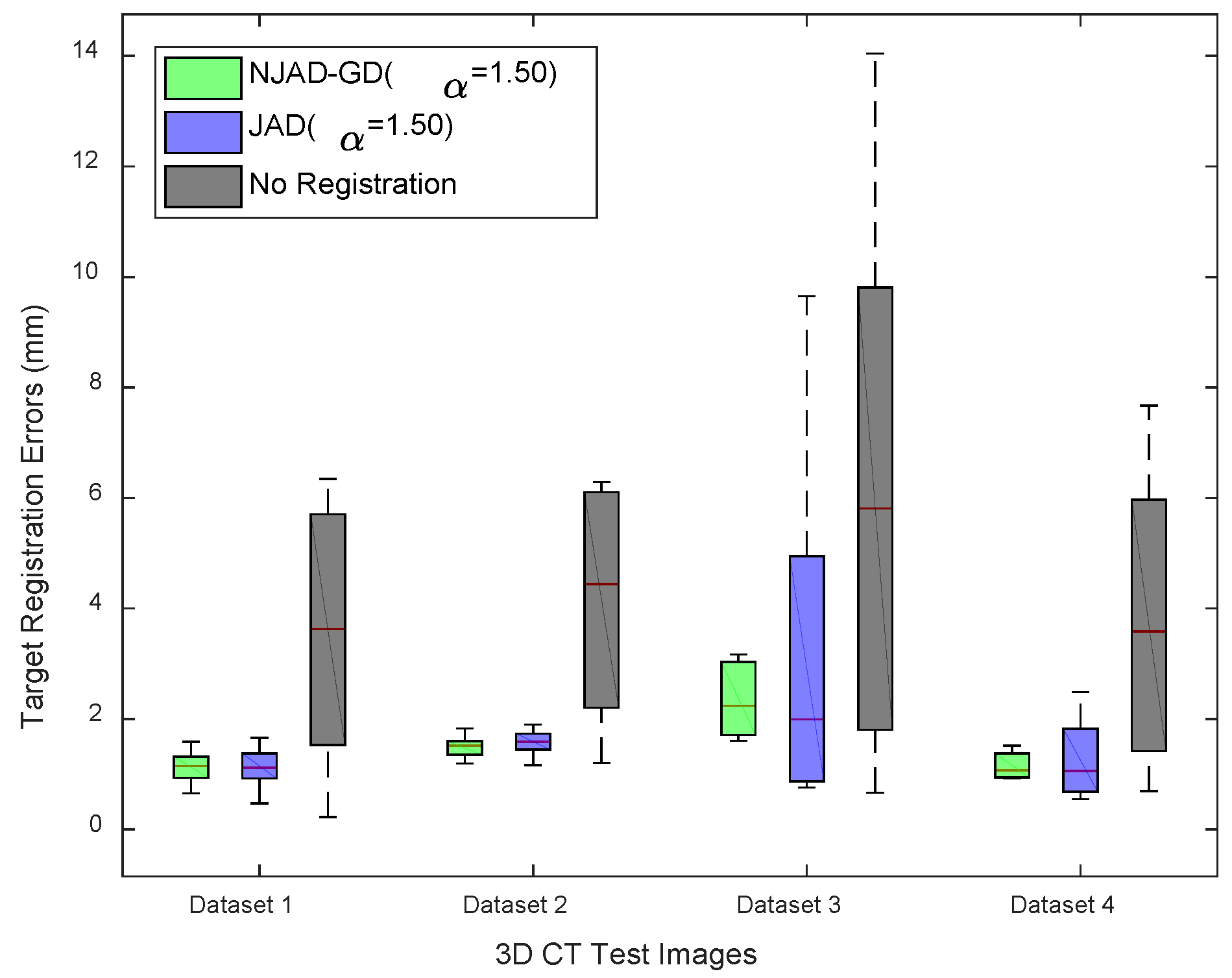
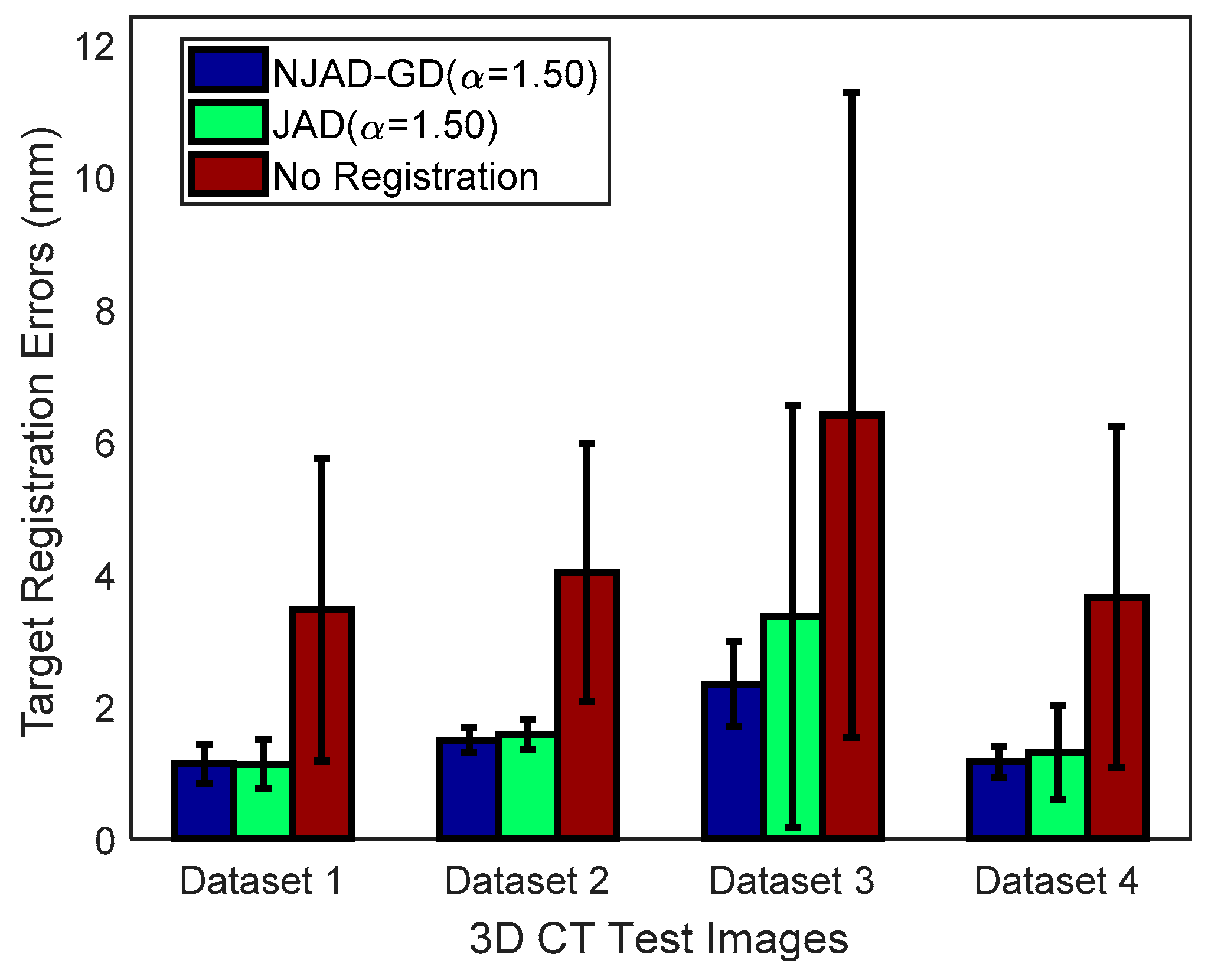
4.3. Experiments of 3D Thoracic CT Images
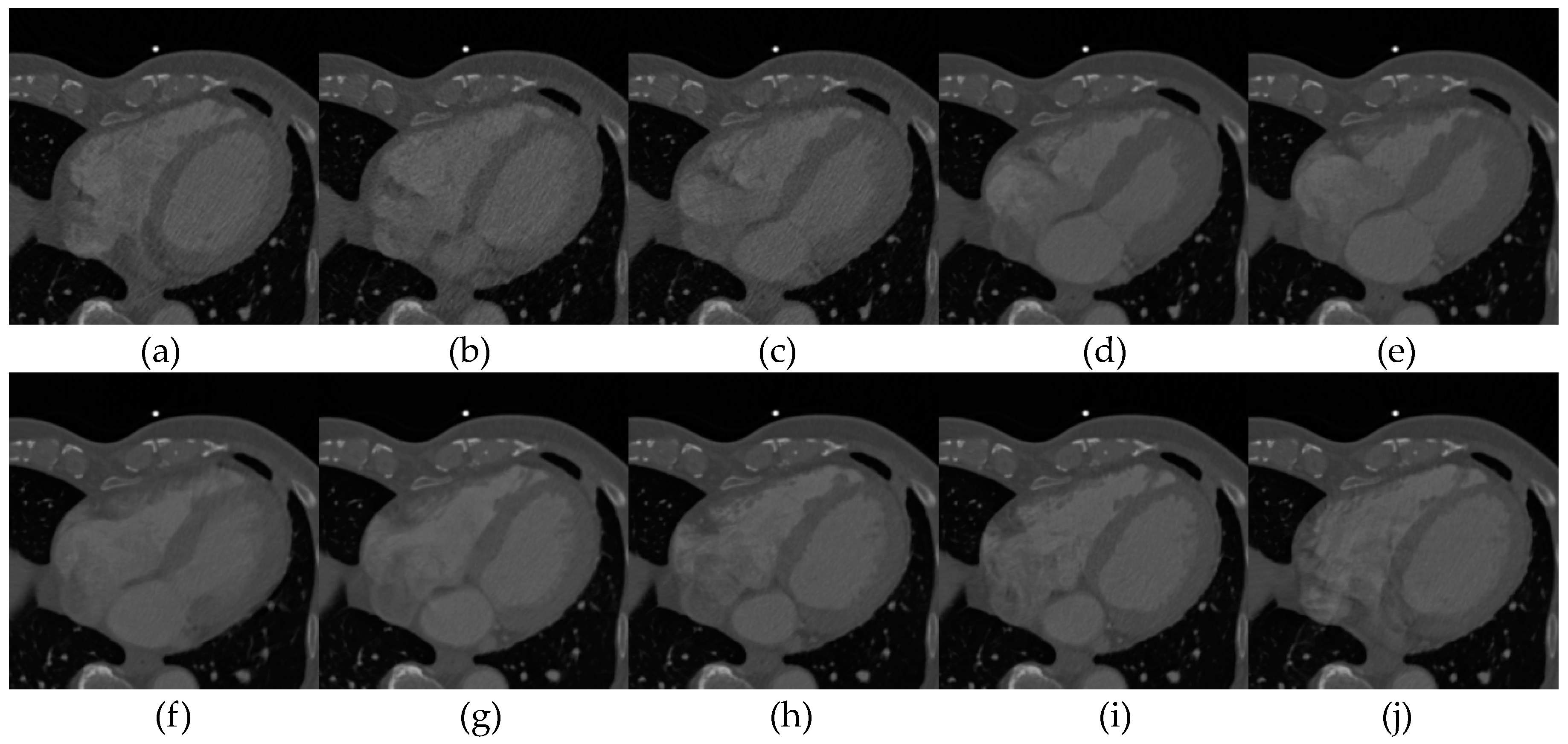
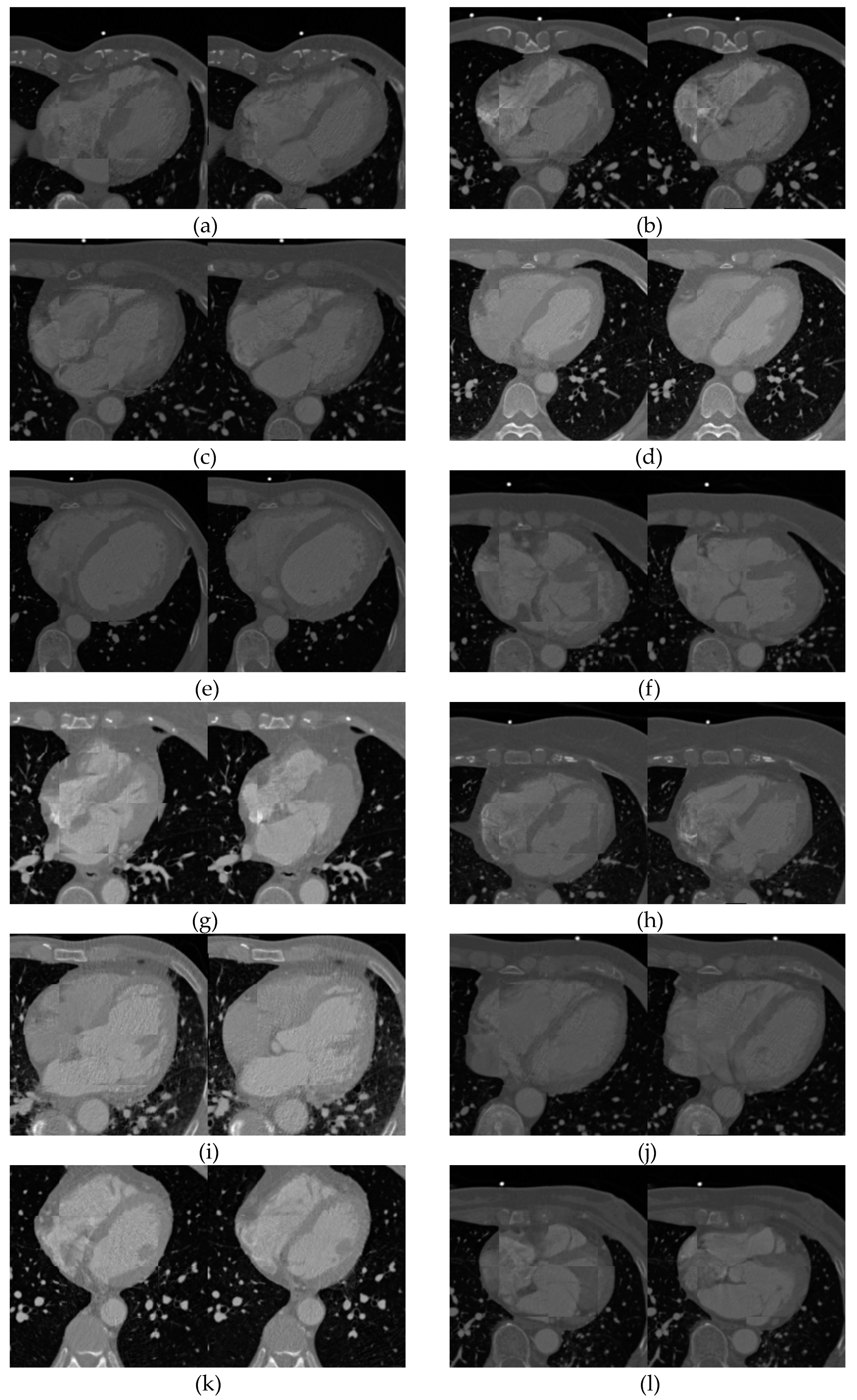
4.4. Registration of 3D Cardiac CT Image
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sadozye, A.H.; Reed, N. A review of recent developments in image-guided radiation therapy in cervix cancer. Curr. Oncol. Rep. 2012, 14, 519–526. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Gao, X.; Zhou, Z.; Wang, X. Evaluation of four similarity measures for 2D/3D registration in image-guided intervention. J. Med. Imaging Health Inf. 2014, 4, 416–421. [Google Scholar] [CrossRef]
- Song, G.; Han, J.; Zhao, Y.; Wang, Z.; Du, H. A Review on Medical Image Registration as an Optimization Problem. Curr. Med. Imaging Rev. 2017, 13, 274–283. [Google Scholar] [CrossRef] [PubMed]
- Collignon, A.; Maes, F.; Delaer, D.; Vandermeulen, D.; Suetens, P.; Marchal, G. Automated multi-modality image registration based on information theory. Inf. Process. Med. Imaging 1995, 3, 263–274. [Google Scholar]
- Maes, F.; Collignon, A.; Vandermeulen, D.; Marchal, G.; Suetens, P. Multimodality image registration by maximization of mutual information. IEEE Trans. Med. Imaging 1997, 16, 187–198. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wells, W.M., III; Viola, P.; Atsumi, H.; Nakajima, S.; Kikinis, R. Multi-modal volume registration by maximization of mutual information. Med. Image Anal. 1996, 1, 35–51. [Google Scholar] [CrossRef]
- Studholme, C.; Hill, D.L.G.; Hawkes, D.J. An overlap invariant entropy measure of 3d medical image alignment. Pattern Recogn. 1999, 32, 71–86. [Google Scholar] [CrossRef]
- Wang, F.; Vemuri, B.C.; Rao, M.; Chen, Y. Cumulative Residual Entropy, A New Measure of Information & its Application to Image Alignment. IEEE Int. Conf. Comput. Vis. 2003. [Google Scholar] [CrossRef]
- Rao, M.; Chen, Y.; Vemuri, B.C.; Wang, F. Cumulative residual entropy: A new measure of information. IEEE Trans. Inf. Theory 2004, 50, 1220–1228. [Google Scholar] [CrossRef]
- Wang, F.; Vemuri, B.C. Non-rigid multi-modal image registration using cross-cumulative residual entropy. Int. J. Comput. Vis. 2007, 74, 201–215. [Google Scholar] [CrossRef]
- Antolín, J.; LópezRosa, S.; Angulo, J.C.; Esquivel, R.O. Jensen-tsallis divergence and atomic dissimilarity for position and momentum space electron densities. J. Chem. Phys. 2010, 132, 131. [Google Scholar] [CrossRef]
- Mohammed, K.; Hamza, A.B. Nonrigid image registration using an entropic similarity. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 681–690. [Google Scholar] [CrossRef]
- Khader, M.; Hamza, A.B. An information-theoretic method for multimodality medical image registration. Expert Syst. Appl. 2012, 39, 5548–5556. [Google Scholar] [CrossRef]
- Li, B.; Yang, G.; Shu, H.; Coatrieux, J.L. A New Divergence Measure Based on Arimoto Entropy for Medical Image Registration. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014. [Google Scholar] [CrossRef]
- Li, B.; Yang, G.; Coatrieux, J.L.; Li, B.; Shu, H. 3d nonrigid medical image registration using a new information theoretic measure. Phys. Med. Biol. 2015, 60, 8767–8790. [Google Scholar] [CrossRef] [PubMed]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in C, 3rd ed.; Cambridge Univ. Press: Cambridge, UK, 2007; Chapter 10; pp. 521–526. [Google Scholar]
- Cover, T.M. Elements of Information Theory (Wiley Series in Telecommunications and Signal Processing); Wiley-Interscience: New York, NY, USA, 2017. [Google Scholar]
- Arimoto, S. Information-theoretical considerations on estimation problems. Inf. Control 1971, 19, 181–194. [Google Scholar] [CrossRef] [Green Version]
- Boekee, D.E.; Van der Lubbe, J.C. The r-norm information measure. Inf. Control 1980, 45, 136–155. [Google Scholar] [CrossRef]
- Li, M.; Chen, X.; Li, X.; Ma, B.; Vitanyi, P.M.B. The similarity metric. IEEE Trans. Inf. Theory 2004, 50, 3250–3264. [Google Scholar] [CrossRef]
- He, Y.; Hamza, A.B.; Krim, H. A generalized divergence measure for robust image registration. IEEE Trans. Signal Process. 2003, 51, 1211–1220. [Google Scholar] [CrossRef] [Green Version]
- Mattes, D.; Haynor, D.R.; Vesselle, H.; Lewellen, T.K.; Eubank, W. PET-CT image registration in the chest using free-form deformations. IEEE Trans. Med. Imaging 2003, 22, 120–128. [Google Scholar] [CrossRef]
- Klein, S.; Staring, M.; Pluim, J.P.W. Evaluation of optimization methods for nonrigid medical image registration using mutual information and b-splines. IEEE Trans. Image Process. 2008, 16, 2879–2890. [Google Scholar] [CrossRef]
- Nocedal, J. Updating quasi-newton matrices with limited storage. Math. Comput. 1980, 35, 773–782. [Google Scholar] [CrossRef]
- Staring, M.; Klein, S. Itk:: Transforms Supporting Spatial Derivatives. Available online: http://hdl.handle.net/10380/3215 (accessed on 8 September 2010).
- Klein, S.; Staring, M.; Murphy, K.; Viergever, M.A.; Pluim, J.P.W. Elastix: A toolbox for intensity-based medical image registration. IEEE Trans. Med. Imaging 2009, 29, 196–205. [Google Scholar] [CrossRef] [PubMed]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Shu, H.; Liu, Z.; Shao, Z.; Li, C.; Huang, M.; Huang, J. Nonrigid Medical Image Registration Using an Information Theoretic Measure Based on Arimoto Entropy with Gradient Distributions. Entropy 2019, 21, 189. https://doi.org/10.3390/e21020189
Li B, Shu H, Liu Z, Shao Z, Li C, Huang M, Huang J. Nonrigid Medical Image Registration Using an Information Theoretic Measure Based on Arimoto Entropy with Gradient Distributions. Entropy. 2019; 21(2):189. https://doi.org/10.3390/e21020189
Chicago/Turabian StyleLi, Bicao, Huazhong Shu, Zhoufeng Liu, Zhuhong Shao, Chunlei Li, Min Huang, and Jie Huang. 2019. "Nonrigid Medical Image Registration Using an Information Theoretic Measure Based on Arimoto Entropy with Gradient Distributions" Entropy 21, no. 2: 189. https://doi.org/10.3390/e21020189
APA StyleLi, B., Shu, H., Liu, Z., Shao, Z., Li, C., Huang, M., & Huang, J. (2019). Nonrigid Medical Image Registration Using an Information Theoretic Measure Based on Arimoto Entropy with Gradient Distributions. Entropy, 21(2), 189. https://doi.org/10.3390/e21020189