1. Introduction
The detection of small transient events, momentary internal or external discontinuities in the inputs or outputs, in nonlinear dynamical systems has received considerable attention in recent years. It continues to be an open scientific problem in many disciplines such as physics [
1], engineering [
2], and biological sciences [
3]. Dynamical systems can be thought of as networks of interacting elements that change over time [
4,
5,
6,
7,
8,
9]. Those systems display complex changing behaviors at the global (macroscopic) scale, emerging from the collective actions of the interacting elements at the microscopic scale [
10,
11]. Due to the complexity of nonlinear systems, small global or microscopic transient events can influence the emerging dynamics and trajectories of those systems [
2]. A natural propensity for chaotic behavior can exist in any complex system or network [
12]. Thus, it is crucial to develop efficient methods for detecting small transient events and gain insights into the ramification of those events by tracking the evolution of the system dynamics. Examples of transient events may include malicious attacks on social or communication networks [
13], whirled in sand particles instigated by tiny disturbances [
14], intermittent switching between open- and closed-cracks in mechanical structures leading to sudden cascaded failure [
15], acoustic flame extinction [
16], or evidence of a distant catastrophic event like an earthquake [
17].
Detecting discontinuities can be particularly challenging in systems exhibiting nonlinear, chaotic, or time-varying behaviors [
18,
19,
20,
21]. Although effective in many cases, detection methods that are based on signal statistics ignore causal or correlational relationships between data points. For example, the mean and standard deviation are typically calculated with the assumption that each data point is independent and part of the same population. If the assumption is reasonable for most data points, i.e., any relationship between points is weak, then outliers can be detected by merely noting points that are significantly different from the mean. However, transient events that correlate with the dynamics of the system produce subtle changes to the shape of the distribution at the tails. This subtlety can mask an unusual behavior if the data are not partitioned or not modeled appropriately [
22].
For a dynamical system, consecutive points are limited to physically realizable solutions of the underlying governing equations of the system. In other words, consecutive data points in a dynamical system are inherently causal, so sudden disturbances will change the system trajectory if only for a short amount of time [
23]. As a result, the system will have a topological structure intrinsic to the dynamic behaviors instigated by the disturbances. The topological structure holds some memory of the disturbances, which are reflected in the dynamics of the new state of the system [
23,
24]. Memory, however brief, implies the storage or transference of information [
7]. In recent years, measures of information have become an important tool for discriminating between deterministic and stochastic behavior in dynamical systems [
25,
26].
The concept that physical systems produce information was proposed to the dynamics community by Robert Shaw [
27]. His idea revolutionized the approach to dynamical systems analysis by allowing the use of information theory, namely entropy, to quantify changes in a dynamical system’s topological structure. Information entropy measures the variation of pattern in a sequence, thereby capturing the internal structure or relationships that exist between data points [
28]. However, information entropy, like its thermodynamic counterpart, describes macroscopic not microscopic behaviors. Just as with signal statistics, small or localized system changes can be easily engulfed by larger or more dominant behaviors.
This paper aims to solve the technical challenge of creating a reliable method for detecting small discontinuities in the response signal of a nonlinear dynamical system even during chaos. This is particularly important since small disturbances in chaotic systems may have large consequences. To do this, the authors chose to take an information theorical approach to account for changes in topological structure of the system. Some background on dynamical systems and information theory is provided to the reader in
Section 2 to explain this approach. To overcome the limitation of using statistically-based methods to examine changes in response data that are statistically insignificant, an entropy-like function without the need of using Boltzmann’s equation was devised. Discussion and derivation of the new function are provided in
Section 3. The function appears to reveal a detailed informational structure of the response signal that, as demonstrated by the example in
Section 4, is sensitive to small intermittent events or impulses. Therefore, the authors call it the Information Impulse Function (IIF), which examines a response signal for discontinuity events on a more localized scale than traditional information entropy methods. Numerical experiments were then conducted to examine the detection sensitivity of the IIF. Results in
Section 5 show that the IIF outperforms Permutation entropy and Shannon entropy in detecting small discontinuities in a signal and is able to capture the change in the dynamic structure of the system using the Poincare distance plot, which is the standard for characterizing the nonlinear and chaotic behaviors in dynamical systems [
3]. Finally, the conclusion and future work are presented in
Section 6.
2. Theory and Background
2.1. Topological Structures of Dynamical Systems
In this section, a general overview of the theory and applicability of nonlinear dynamical system is provided, with an emphasis on the states behaviors of a Duffing system [
29]. The Duffing system was chosen because of its rich complexity, considerable utility in physics and engineering applications, and as a benchmark in analyzing nonlinear systems. From a mathematical perspective, the topological structure of any dynamical system can be referred to as the system state space,
, such that
defines the current dynamic states of the interacting elements in the system. Evolving from a present to a future state in a continuous time system is detected by an evolution law that acts on
. Typically, the data or signal collected from a dynamical system, and the law acting on
can be expressed as a system of differential equations (Equation (1)):
A state space
can be a set of discrete elements, a vector space, or a manifold. The vector
represents the state of the dynamical system at a nondimensional characteristic time
, where
is having dimension
. The function
is the evolution law that represents the dynamics of the data. To improve the sensitivity of detecting momentary disturbances in a dynamical system, it is necessary to describe its topological changes due to small discontinuities in the input signal (global disturbances), and the parameters (internal disturbances) of the system. To this end, the Duffing system, which consists of a cubic nonlinear term, can be represented as a nonlinear ordinary differential equation (ODE), as follows:
The forcing function can be thought of as an input signal into a dynamical system. A harmonic signal, where , is selected in this study. The forcing amplitude and frequency are and , respectively. The dissipative and nonlinear restoring forces contain a damping ratio, , and a cubic coefficient, , respectively. The system’s natural frequency, , is equal to one, such that the linear restoring force is . The over-dots represent the temporal derivatives for the system response , which can be output signals at time . In this paper, the dynamical system in Equation (2) is treated as a mechanical system. Therefore, and are referred to as velocity and acceleration, respectively. The coefficients in Equation (2) are nominally set to the dimensionless values: , , . These values were chosen as they produce a wide range of dynamical behavior over a relatively short range in excitation values. The range used in this paper was 0.1 to 0.45.
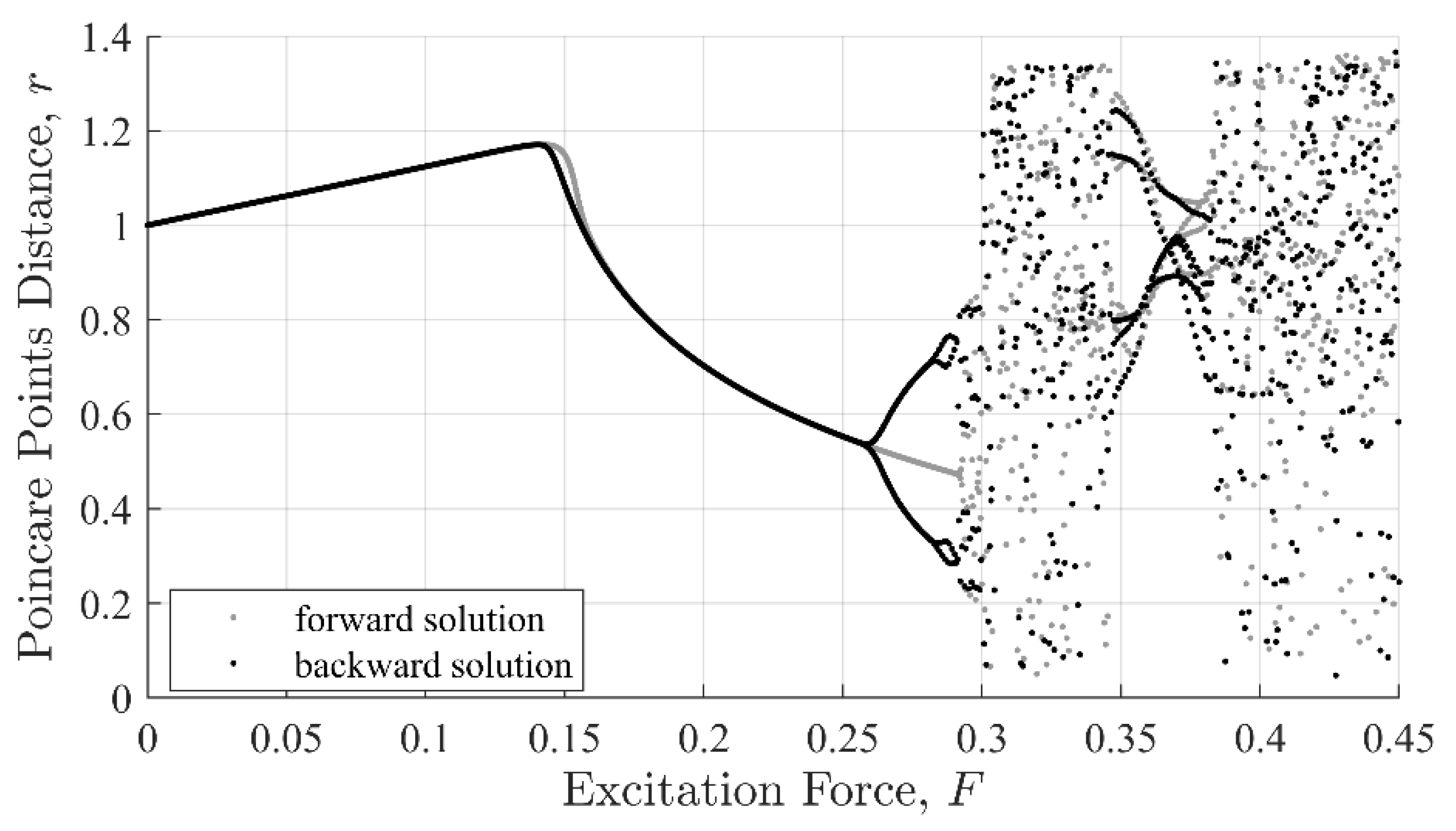
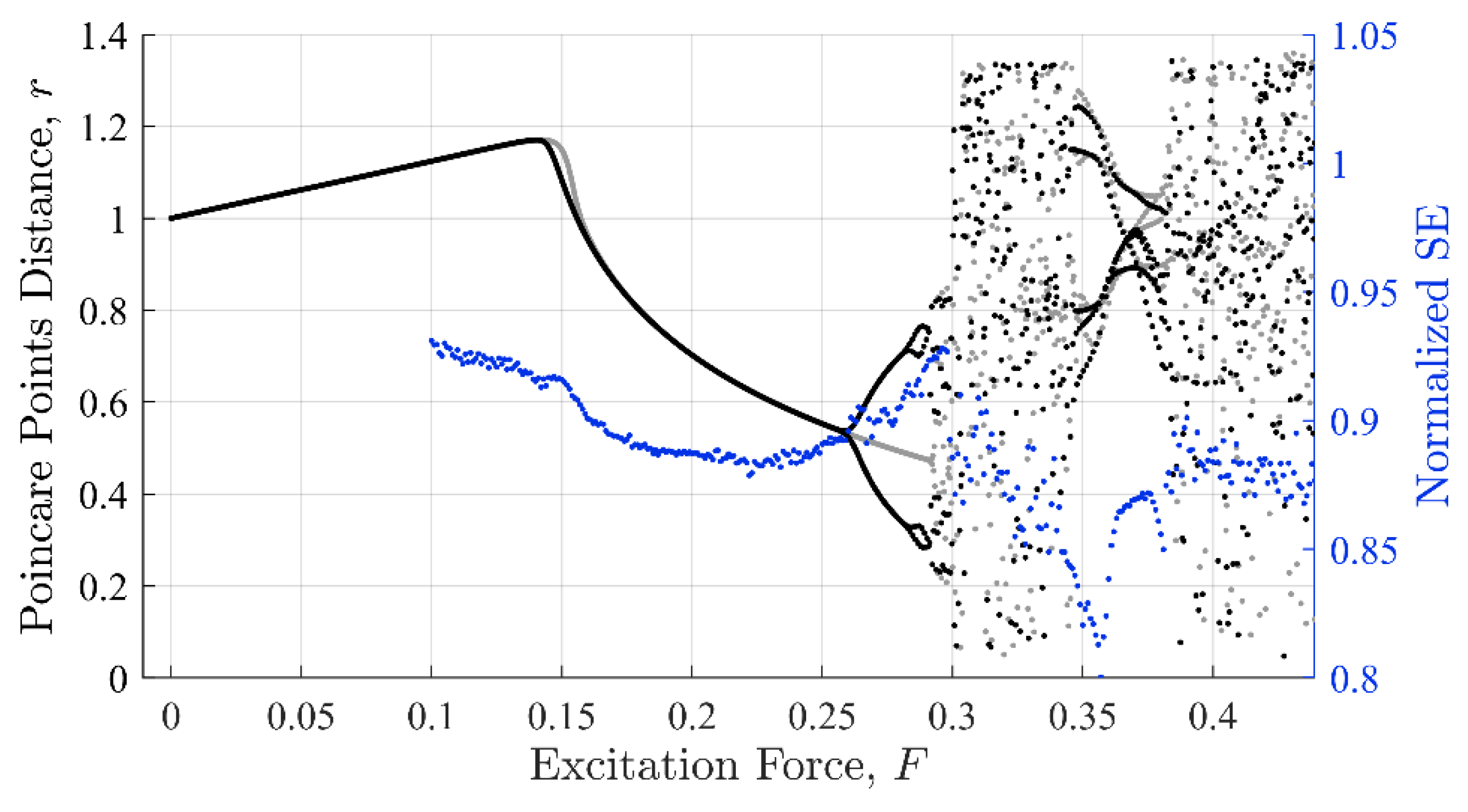
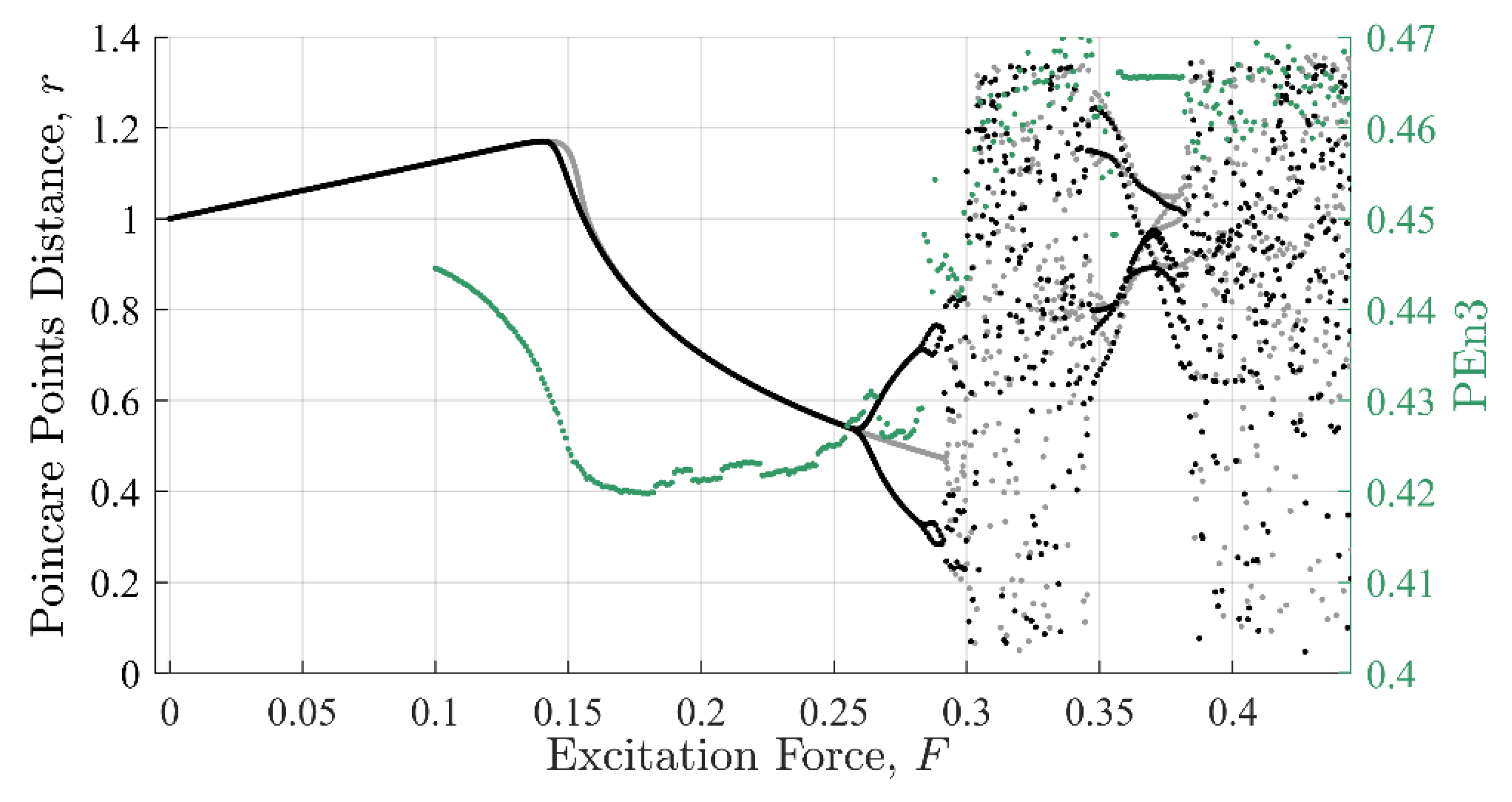
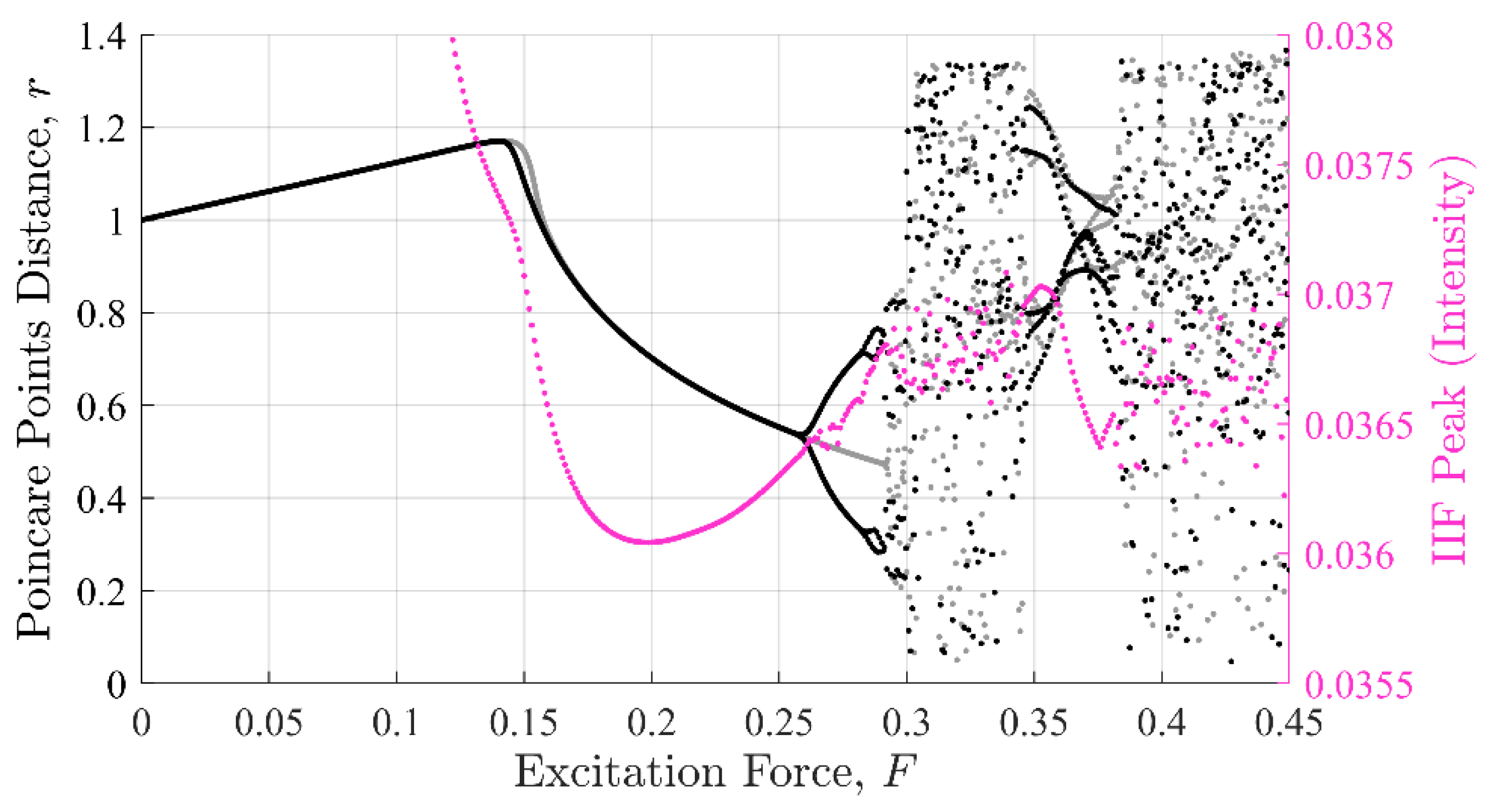
The topological evolution of a dynamical system can be visualized via Poincaré distance [
30], which is based on the system phase portrait, i.e., velocity verses response, as shown in
Figure 1. The Poincaré distance reveals important intrinsic features about the dynamics of the system such as its stability, nonlinearity, and chaotic behaviors. The Poincaré distance,
, is computed with Equation (3), were
and
are taken at intervals of
. The parameter
is the Euclidian distance from the origin on a phase diagram for
:
From the Poincaré plot, it can be observed that the system displays steady state behavior as long as . As the excitation amplitude increases beyond , the system transitions to a chaotic regime and remains there for . At this point, the system will return to a state of periodic behavior then to a chaotic state for .
It is important to point out that the cubic nonlinear term and time-dependent force are responsible for the bifurcation and chaotic behaviors [
29]. Under periodic excitation, the system is known to possess multiple steady-state solutions. For example, varying the forcing amplitude or frequency can cause a steady-state dynamic behavior to changes drastically due to a transition from one stable condition to another stable or unstable one. Bifurcation occurs in a system when a small perturbation in a parameter causes a sudden change in the dynamics of the system, as shown in
Figure 1 near
, or
. Transiting from a stable to unstable state can occur due to perturbations (global change), or due to a drift in parameters (local bifurcations). Bifurcations can also lead to chaotic responses, as shown in
Figure 1 when
to
.
2.2. Information Theoretic Descriptions of Topological Structures for Dynamical Systems
Claude Shannon, the founder of information theory, utilized the concept of entropy from statistical thermodynamics to develop a generalized framework for communications architecture [
28]. Despite being a single scaler value, Shannon’s Entropy can be utilized to quantify the internal structure or regularity in a signal, which makes entropy an important tool for studying the complexity of and hidden features in a signal.
In statistical thermodynamics, the distribution of energy levels of gas particles in a fixed volume can be estimated using the Boltzmann distribution, which maximizes thermodynamic entropy [
31]. Analogous to estimating the frequency of gas particle interactions by maximizing entropy, information theory applies the Boltzmann distribution to model redundancy in a finite sequence of symbols [
32]. Given a sequence
of length
with independently selected messages
that each have a corresponding probability given by
, the normalized Shannon entropy (SE) for
can be calculated as follows:
The redundancy in a sequence
is calculated by categorizing each
into one of
possible categories, which is referred to as
states henceforth. By inspection of Equation (4), it can be inferred that SE results are highly dependent on both the number of states and the criteria for assigning of
to a particular state as that determines the probabilities
. In classical information theory, states are defined by an encoding scheme used to package a signal and transmit it across a channel [
28]. The main criterion for avoiding information loss is that the encoding scheme must contain enough dimensionality to uniquely describe all possible states. Implicit in Shannon’s derivation is that states have significance to the analyst. The examples in his seminal work use words and letters in English sentences to make that point. The analog for response data of a mechanical or biological system, however, is ambiguous. Significance is an arbitrary condition, which means the definition of a state and the set of all possible states is open to the interpretation of the analyst.
As a consequence, there are many extensions of SE, in which they retain the utility of Boltzmann’s distribution: and address the concept of state for a dynamical system in different ways. Notable examples relevant to this paper are Kolmogorov–Sinai entropy, Permutation entropy, spectral entropy, and Singular Entropy. Unlike the extensions mentioned above, the IIF, as will be explained in the next section, produces comparable results even though the use of Boltzmann equation is explicitly abandoned.
Kolmogorov–Sinai entropy, also known as metric entropy, defines states as partitions in phase space, making a direct connection to the physics of dynamical systems [
33,
34]. A reconstruction of the phase space is required for the computation of the entropy, which can make metric entropy impractical for real-time applications [
35].
Permutation entropy was introduced to account for the complexity of order in a sequence [
36]. Unlike metric entropy, permutation entropy does not require a sequence to be the result of a physical process. The states are defined from a set of all possible permutations for a given segment length. Despite permutation entropy disconnection from the physics of the system, the general symbolic equality of permutation entropy and metric entropy was demonstrated, which implies that permutation entropy can be employed to study physical systems [
37]. Since permutation entropy is simpler computationally than metric entropy it is widely utilized in many applications. Garland et al., for example, used a rolling permutation entropy to examine anomalies in paleoclimate data [
38]. Yao et al. cited the computational ease of permutation entropy as an attractive representative entropy method for quantifying complex processes [
39].
Spectral entropy was devised for periodic, stationary signals that the Fourier spectrum was applied to partition the trajectory of a signal into repeatable behaviors [
40]. Spectral entropy is commonly used in a variety of applications for signal classification. Recent applications include structural health monitoring [
41], and identification of sleep disorders [
42]. The continuous utilization of spectral entropy is because a dynamic behavior can be partitioned easily based on its frequency content. The current implementation of the IIF uses the short-time Fourier spectrum (STFT) on this premise (See
Supplementary Materials).
Of the four SE extensions, the IIF is most similar to wavelet singular entropy (WSE), which uses the singular values from a singular value decomposition (SVD) of a wavelet time-frequency decomposition in the Boltzmann equation to express an entropy [
43]. WSE operates on the premise that the singular values correlate to dynamical states. The IIF assumes that dynamical behavior is expressed in the singular vectors instead.
For simplicity, the SE probabilities are calculated by binning acceleration amplitude values (
according to Equation (5):
In this study, the total number of bins, was 250, which was chosen as a nominally representative and easily computable example of an SE solution given a signal length of 5000 points.
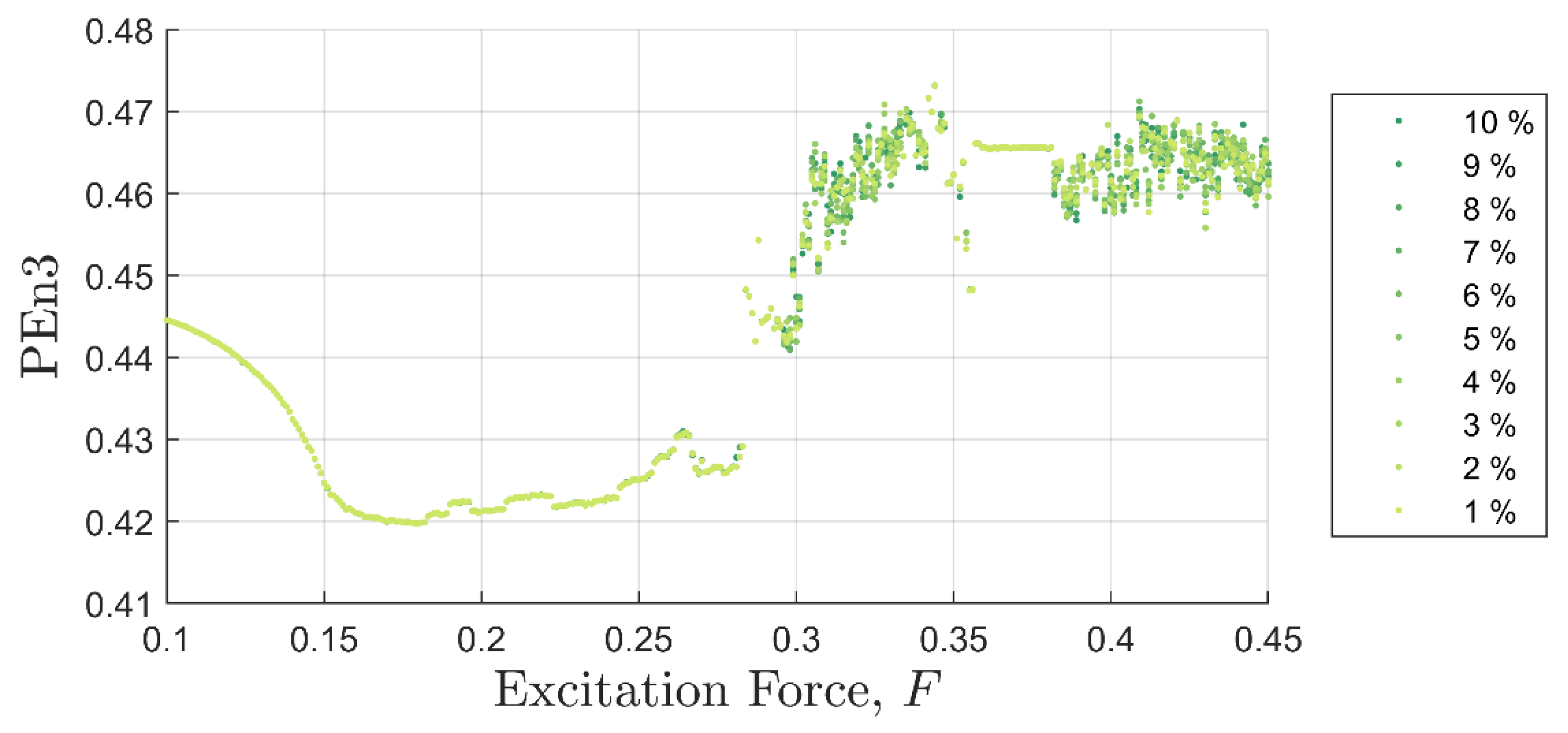
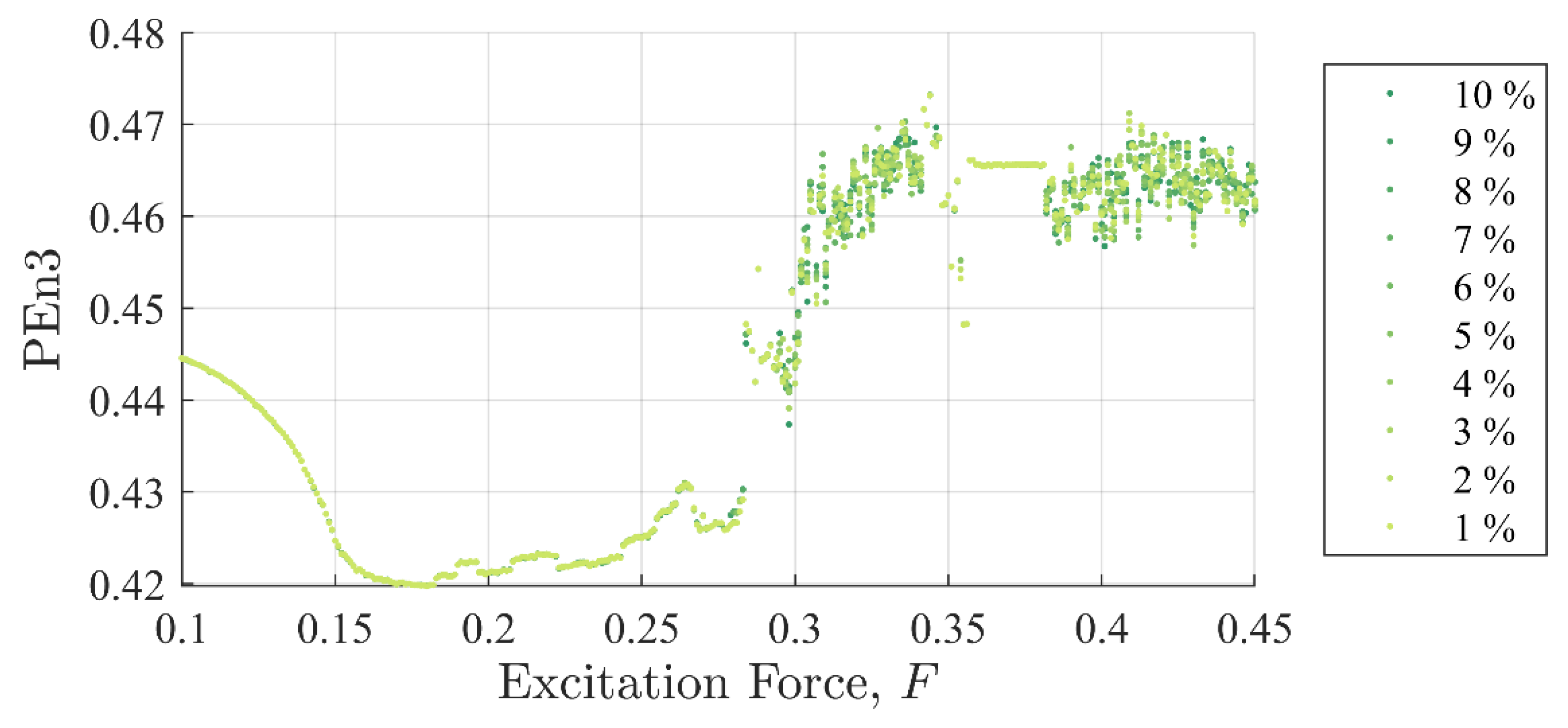
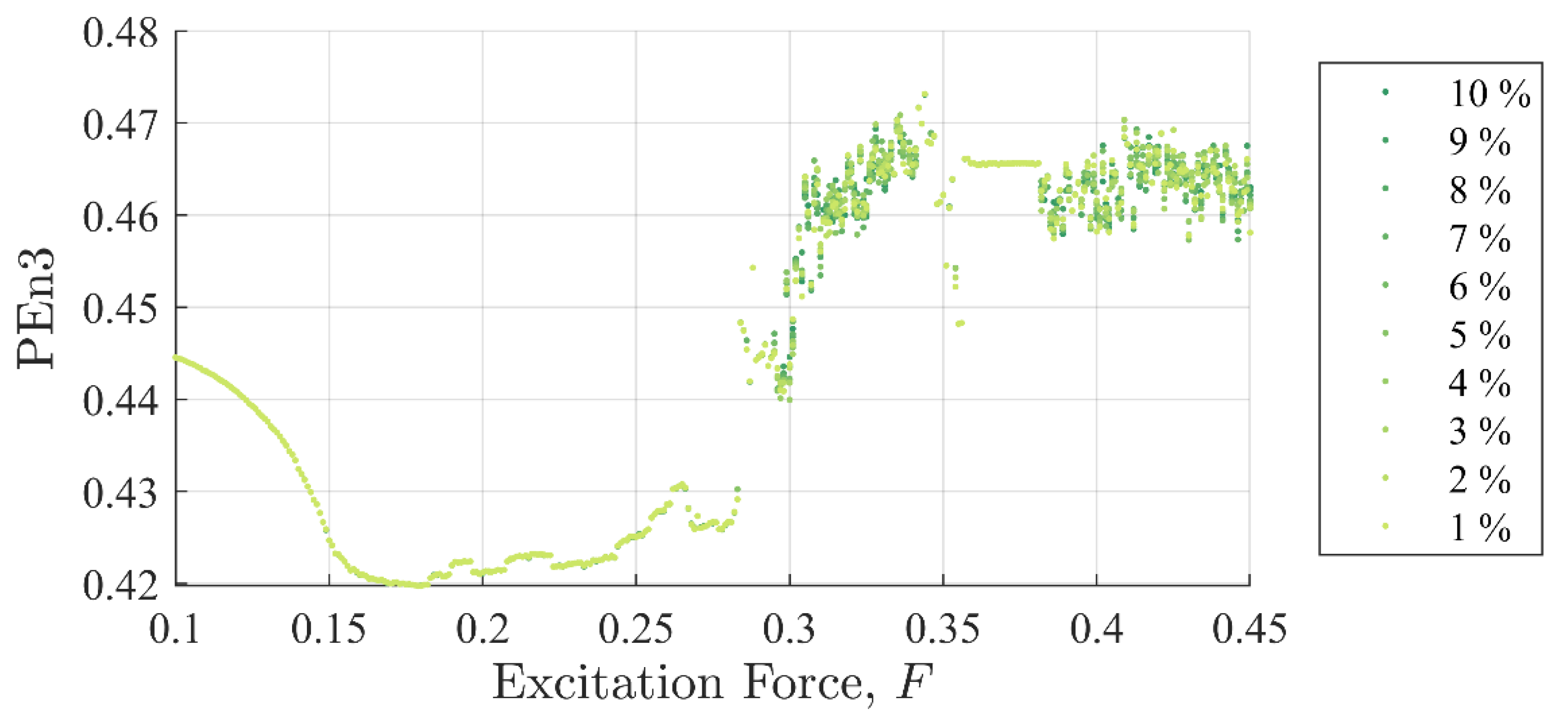
The permutation entropy of order 3, lag 1 (PEn3) is computed by collecting consecutive sequences of three values from a discretely sampled signal, rank-ordering them, and comparing them to a list of six possible patterns:
. The signal is incremented by one sample (lag 1), so the patterns overlap. PEn3 is thus computed via Equation (6):
where
is calculated by taking the total the number of times a specific pattern,
is observed in the signal and dividing it by the total number of categorized sequences. Details on computing PEn3 can be found in [
44]. The permutation entropy results reported in this paper were limited to order 3. Higher orders increased the computation time beyond what would be a reasonable comparison to the IIF without significant gain in sensitivity.
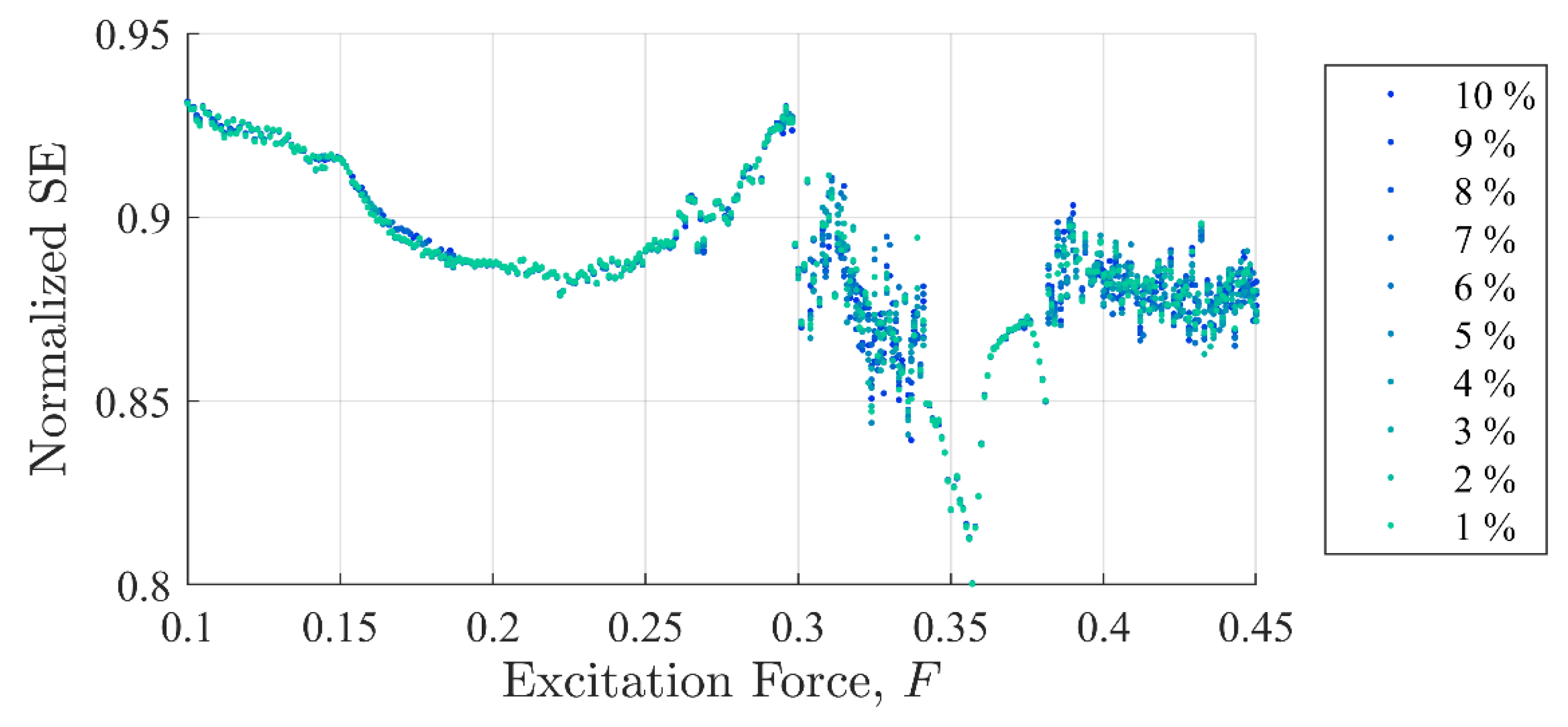
This paper compares the normalized permutation entropy of order 3, lag 1 (PEn3) and an SE solution to the IIF. SE and PEn3 are chosen over Spectral and Singular Entropies because they do not share as many common features with the IIF. Additionally, with the parameters chosen, both of these entropy variations are comparable to the IIF in terms of algorithmic simplicity.
3. The Information Impulse Function
Prior to computing the IIF, the signal must be decomposed such that it is uniquely and yet completely described. This is necessary for the SVD computation in the IIF and analogous to encoding the signal for transmission. Vector space representations are common for both dynamical systems analysis and encoding algorithms [
45,
46,
47]. The decomposition method required by the IIF is otherwise not strictly prescribed. Any one of many common time-frequency decomposition methods can represent a time history into an appropriate vector space.
For the purposes of demonstration, a signal
is decomposed into a vector space using the discrete STFT modulated with a periodic Hann window,
. Equation (7) describes the STFT for
:
The decomposed signal is represented by , which is a function of two dimensions: frequency and discrete time step . The resulting size of, where corresponds to the number of discrete time steps and corresponds to the number of frequency bins. In general, this paper assumes .
Performing an SVD on
forms a rotation from the original signal basis to the most compact description of the signal that can be given only by linear transformations. Parenthetically, the SVD description of
can be used as an expression of the algorithmic or Kolmogorov complexity of the signal. Equation (8) is the decomposition for
, which contains complex values:
The conjugate transpose is . The singular value matrix, , is rank ordered such that > > … > . is a rank matrix that is equal to the number of nonzero singular values in, and are the left and right singular vector matrixes, respectively. The columns of and form a set of orthonormal vectors such that and are unitary. Therefore, if is , then is , is , and is , for and can be thought of as representation of different behaviors in , which is the signal under study in the frequency domain.
Since
is linearly decomposable and rank ordered,
can be approximated by rank reduction or SVD truncation [
48]. The matrix
is approximated by either subtracting out singular values in reverse order starting with the smallest value, or leaving them out of the sum as expressed in Equation (9):
The resulting rank of the approximation, given by
, is equal to the highest index of the singular value used in the sum. At full rank (
),
is approximated by the SVD with minimal error [
48]. The net effect on
of subsequent approximations by rank reduction is a steady increase in information loss.
The product of the truncated matrix
and the transpose of its complex conjugate
, and likewise
and
, only reach the identity matrix
when all vectors (index
j) are included. Equation (10) shows this by writing the unitary product as a sum similarly to Equation (9):
The repeated index does not imply summation, as the sum is shown explicitly.
The intent of IIF is to quantify the
work performed by the rank reduction on the signal subspaces
and
, and to examine the signal’s behavior. The rate of convergence to the identity matrix for each index
as a function of
is used to represent the information loss by a rank reduction specific to each subspace. This rate can be quantified by collecting the diagonal elements resulting from the sums in Equation (10) for each value of
. The resulting expression is simplified to be the cumulative sum of the conjugate square of the singular vector elements over the index
, which represents different values of
. Subsequently, IIF
potential functions for
and
are computed in Equation (11):
For each index , and monotonically increase with . As such, the potentials describe the contribution gradient to the full signal with respect to column index . Alternatively, rank reduction can be thought of as a force acting in the direction, i.e., performing work. Constraining the direction of action to a single dimension implies that the curl is zero. Without an explicit proof, the expressions in Equation (11) are assumed to represent the conservative potential functions in for every value of .
The range for the expressions in Equation (11) (
and
, respectively) are determined by the size of
. Unity is reached, as shown in Equation (10), when all vectors are included. However, Equation (11) reaches a maximum in
when
corresponds to a full rank approximation of
. This is a consequence of rank ordering in the SVD. The corresponding singular vectors in
and
, must contain redundant information because they are effectively removed from the product. Thus, full-rank approximation of
is equated with the maximum information potential. The authors use
to denote this value because the maximum potential can also be thought of as the minimum channel capacity needed to transmit
with minimum error. The work can be calculated by integrating the potential functions in the direction
j up to the maximum potential at
, as follows:
Equation (12) implies that the and are the work required per index to compress the signal (compressing gas particles in a thermodynamic system) with respect to the right and left singular vectors, respectively. The and are normalized such that the sum over index for either function is . The fact that only a scalar value is needed to normalize Equation (12) is a consequence of defining the potential functions on normalized subspaces. The and are given the generic unit of intensity since Equation (12) is proportional to square of a vector subspace.
Either the or the may be used to interrogate the local information content of a signal. To use the IIF to find a discontinuity in time, this paper uses the form of the IIF exclusively.
6. Discussion
A new method to analyze small, momentary internal or external disturbances in time history data has been presented called the Information Impulse Function (IIF). The IIF is derived by solving for the notional work done to transmit a signal that has been decomposed or represented in a vector space. The IIF methodology provides a way to estimate localized information content in a signal without the a priori information needed to rely on the Boltzmann distribution explicitly.
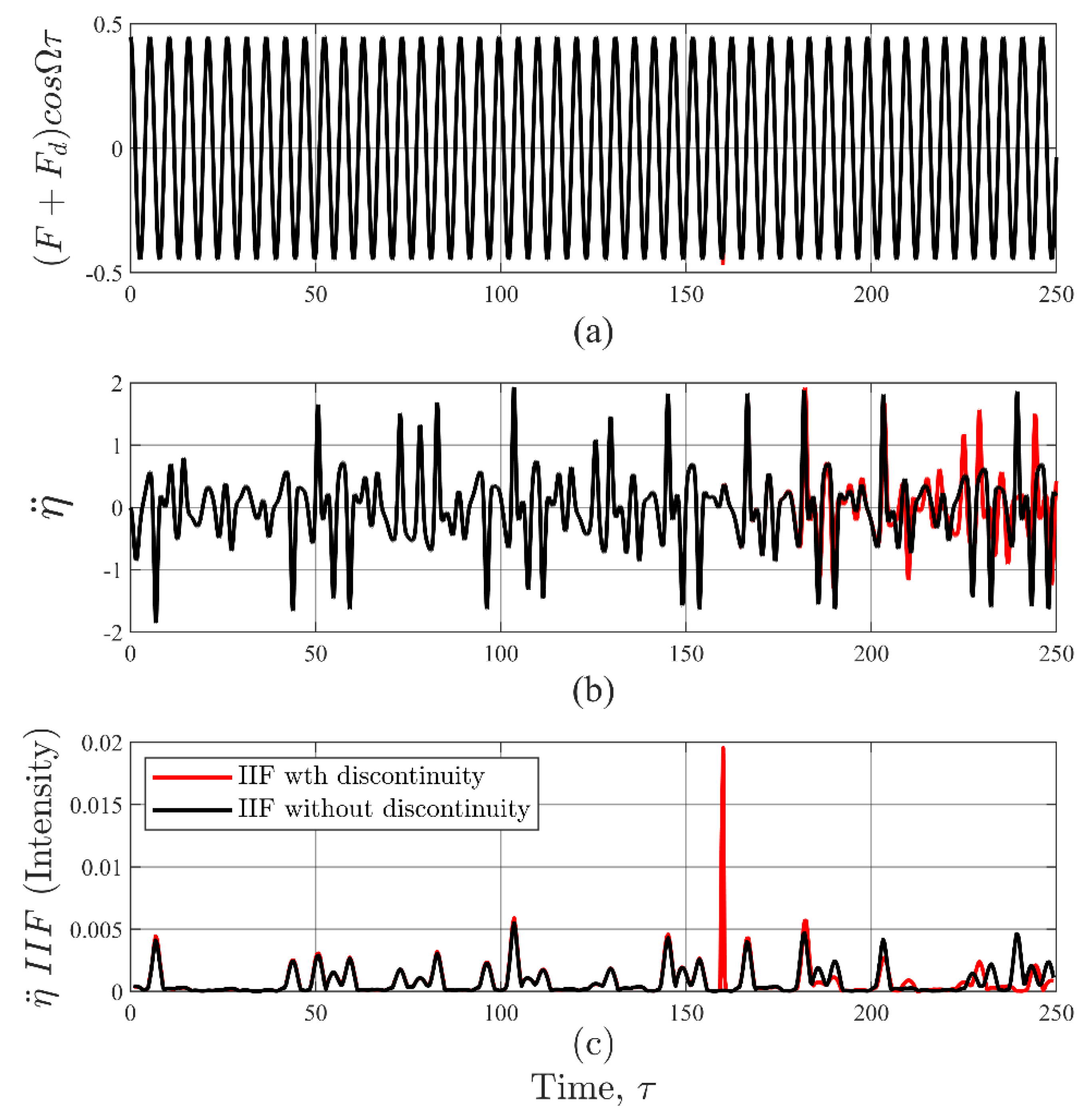
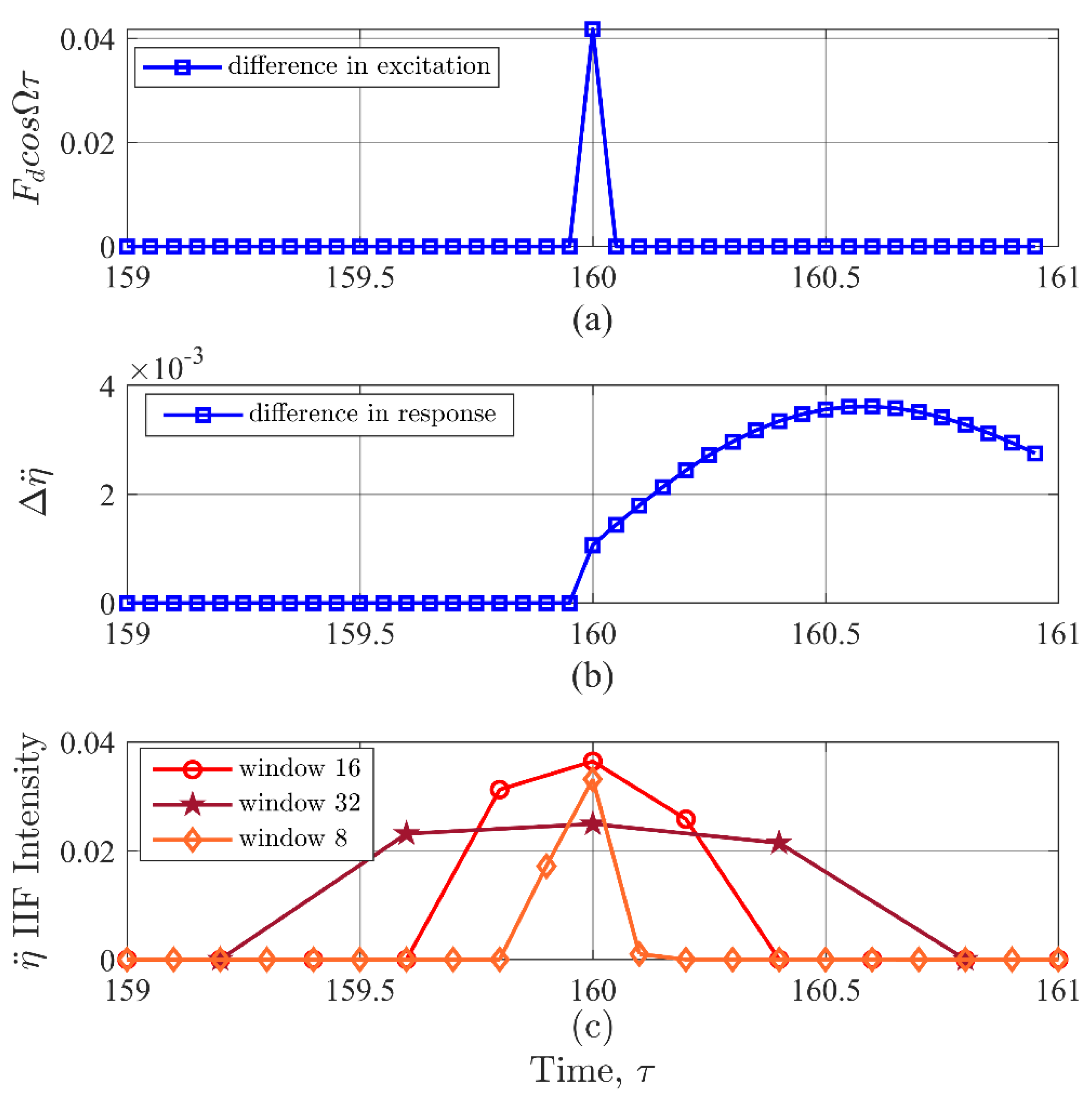
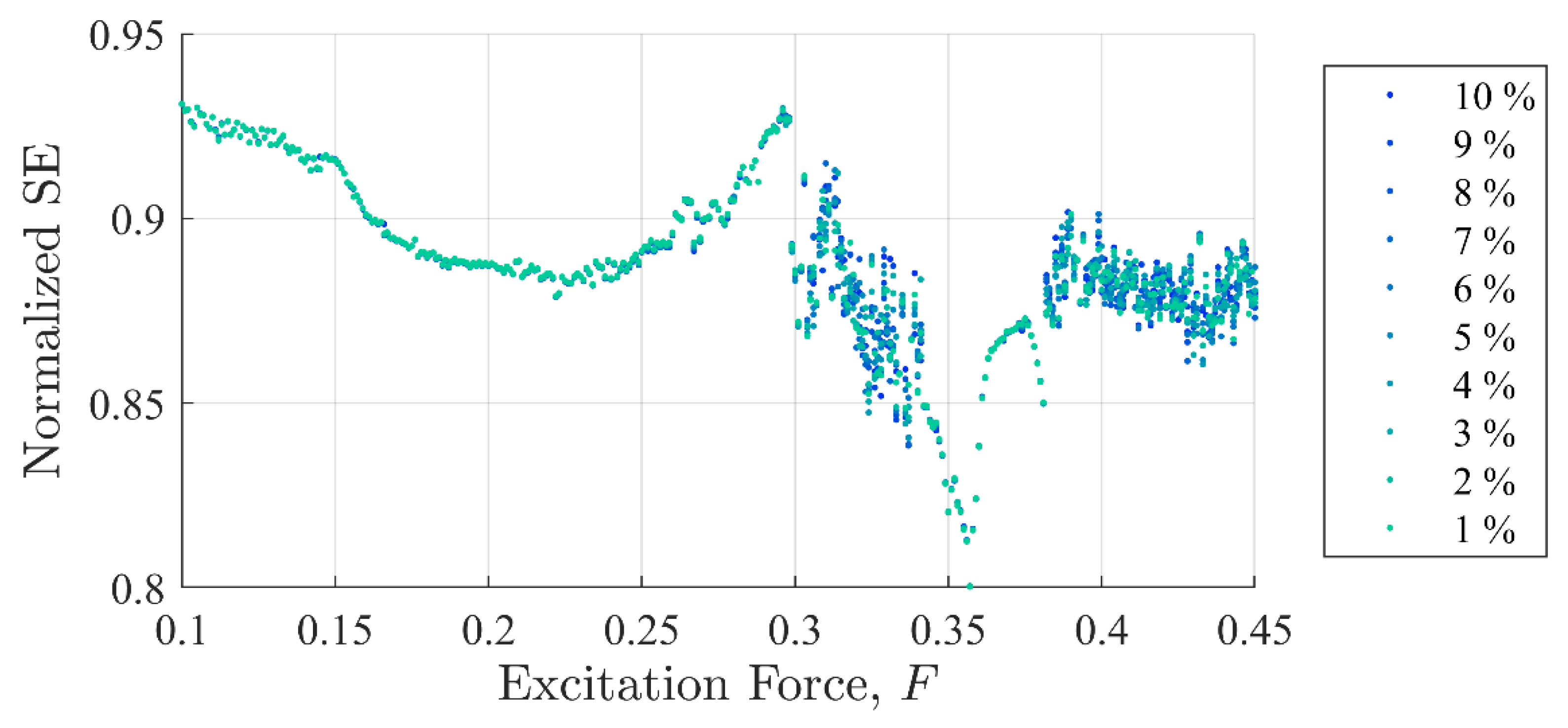
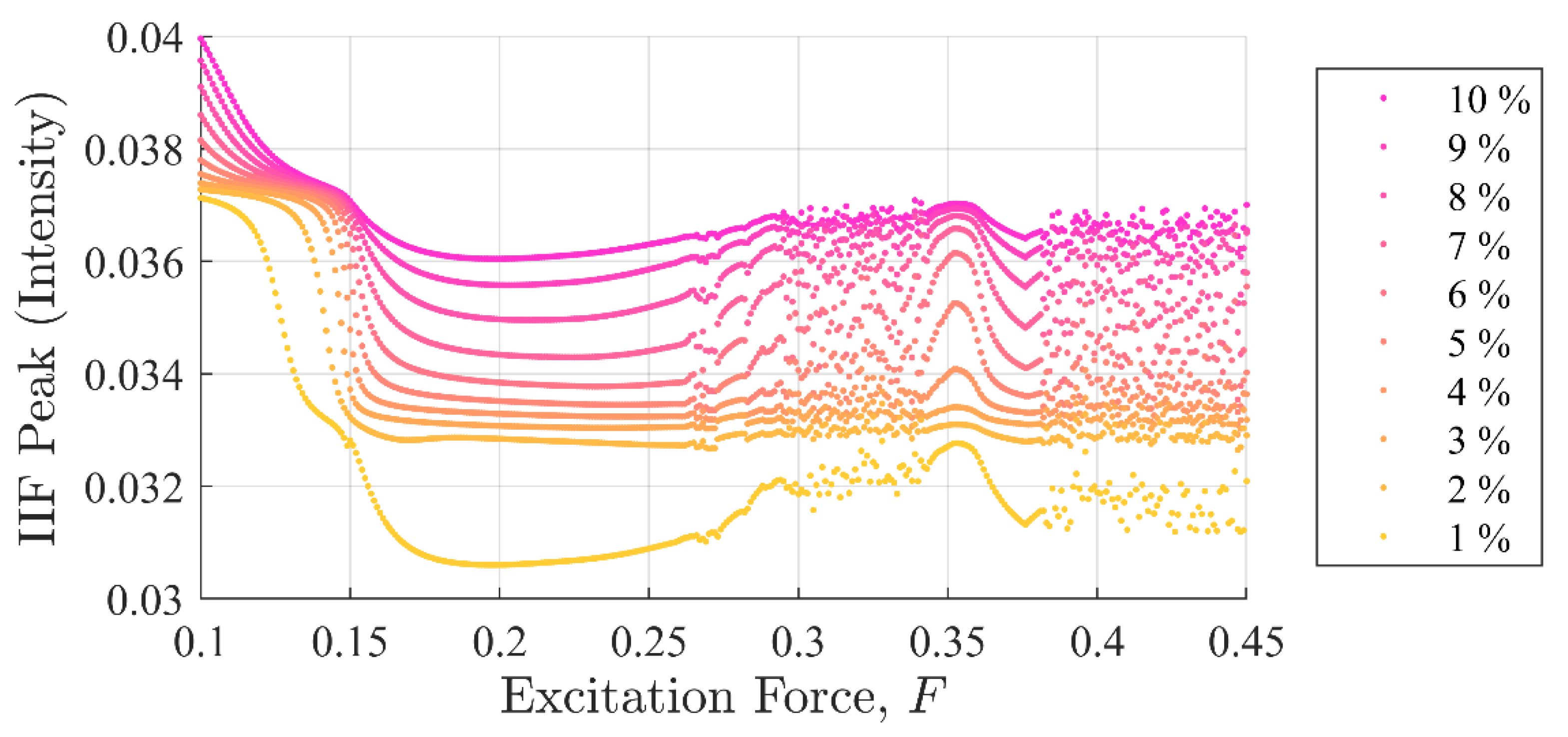
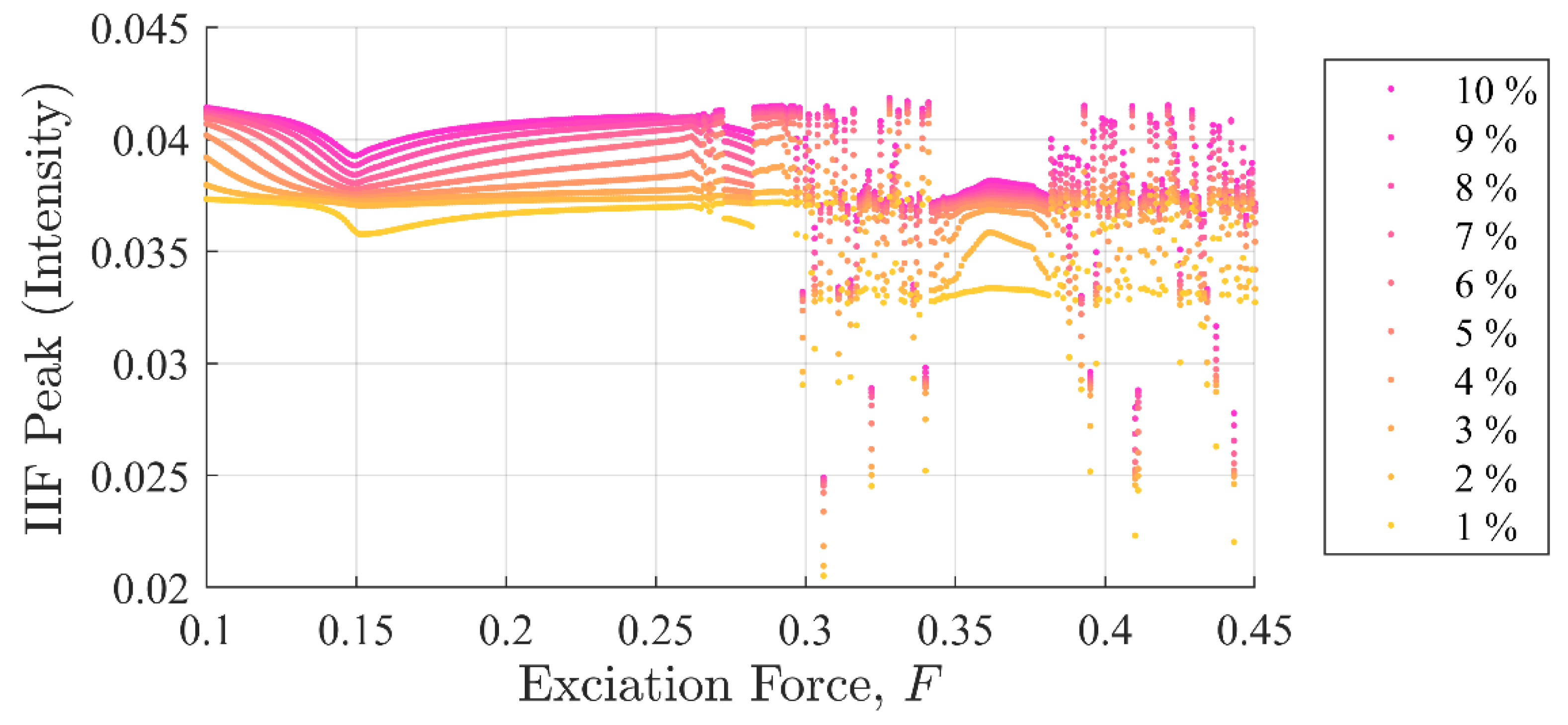
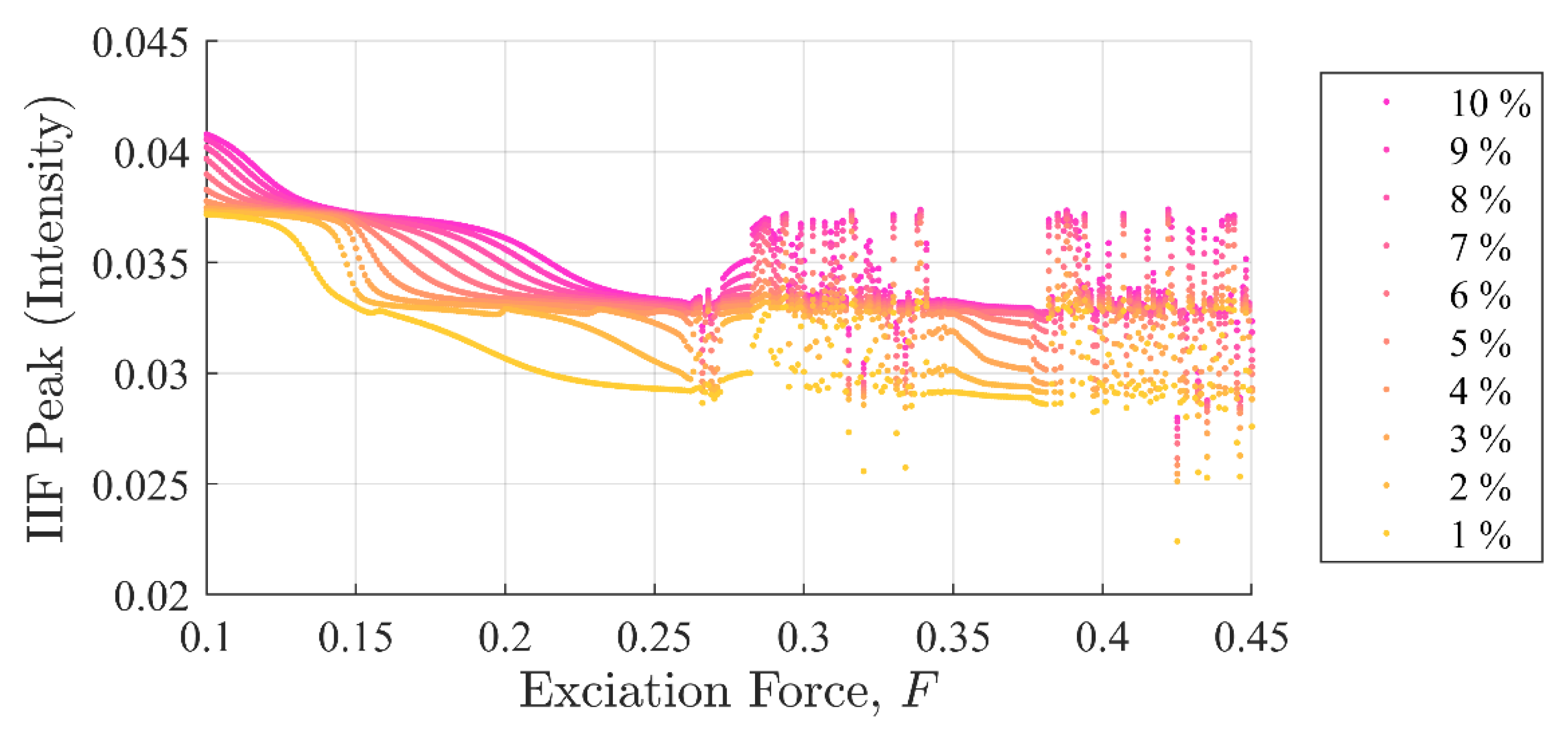
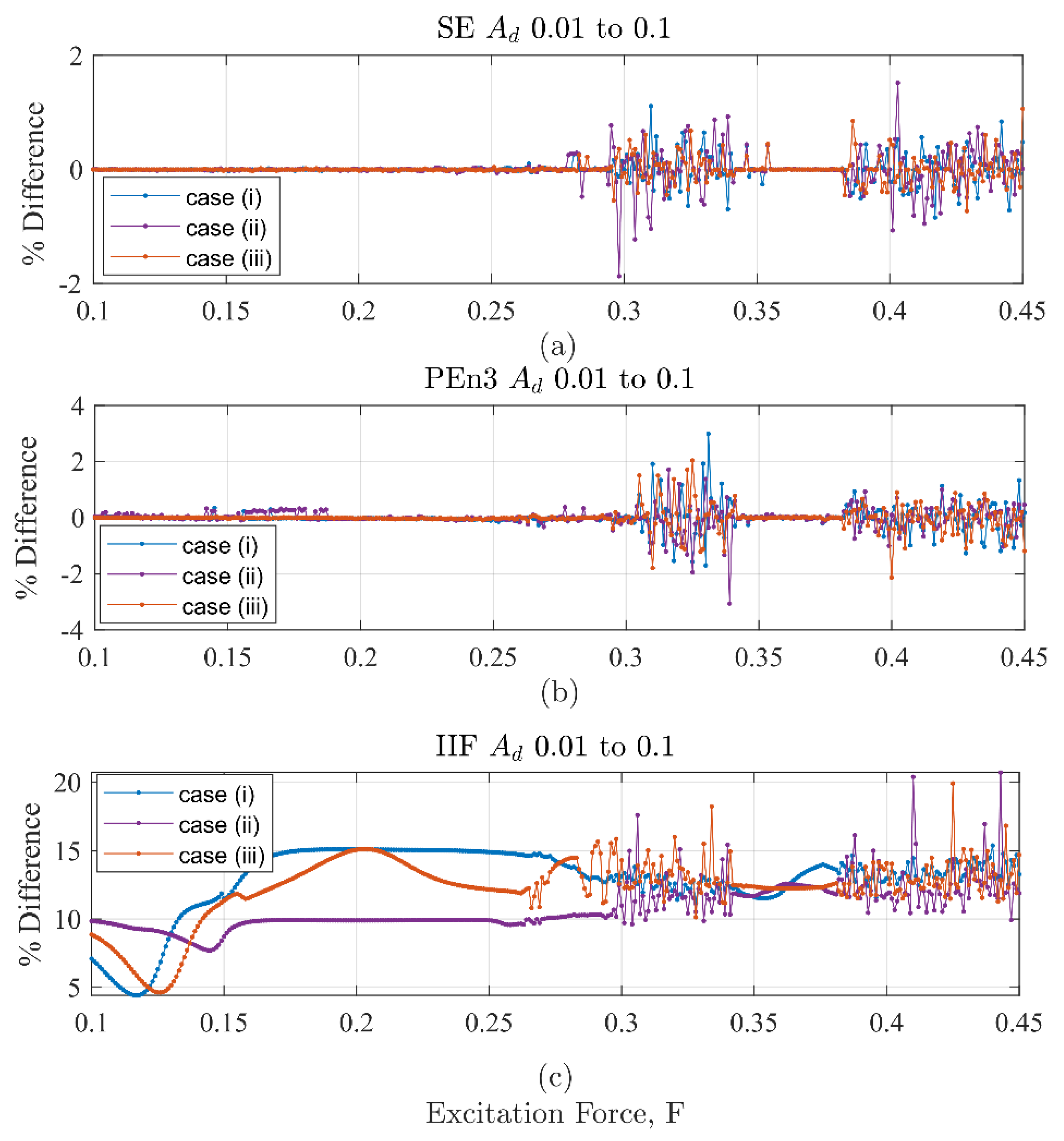
Numerical experiments were conducted to test the ability of the IIF to detect single-point discontinuities in a nonlinear system. Disturbances between and of the nominal parameter amplitudes were introduced into the excitation, stiffness, and damping terms. The IIF was able to detect all momentary internal and external disturbances in the response signal even when the system was chaotic. The results suggest that the amplitude of the IIF was sensitive to both the background complexity of the system and the change in system response. Topological changes in the dynamic behavior of the system due to small discontinuities can be identified easily by tracking the IIF peak values. This was true for when the source of the disturbance was external or internal. The IIF behavior followed similar trends as both Shannon and permutation entropy, suggesting that the IIF behaved like an entropy. However, the IIF was far more superior in detecting small disturbances than permutation entropy and Shannon entropy.
The ability of IIF to detect and localize small discontinues in an input to a dynamical system can be useful feature in many biological, medical, scientific, and engineering applications. Investigating the robustness of the IIF to random noise as well as studies on the utility of the IIF for source identification are on-going research activities. Future work also includes research into the use of alternate decomposition methods.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















