1. Introduction
In various processes in nature and social sciences, e.g., artificial neural networks, biology, medicine, and sociology, the logistic growth is observed in experiments. The logistic growth describes, at the macroscopic scale, the limited growth of a population. It is a typical way of modeling tumor growth—see e.g., [
1,
2,
3] and references therein. It leads to the curve of
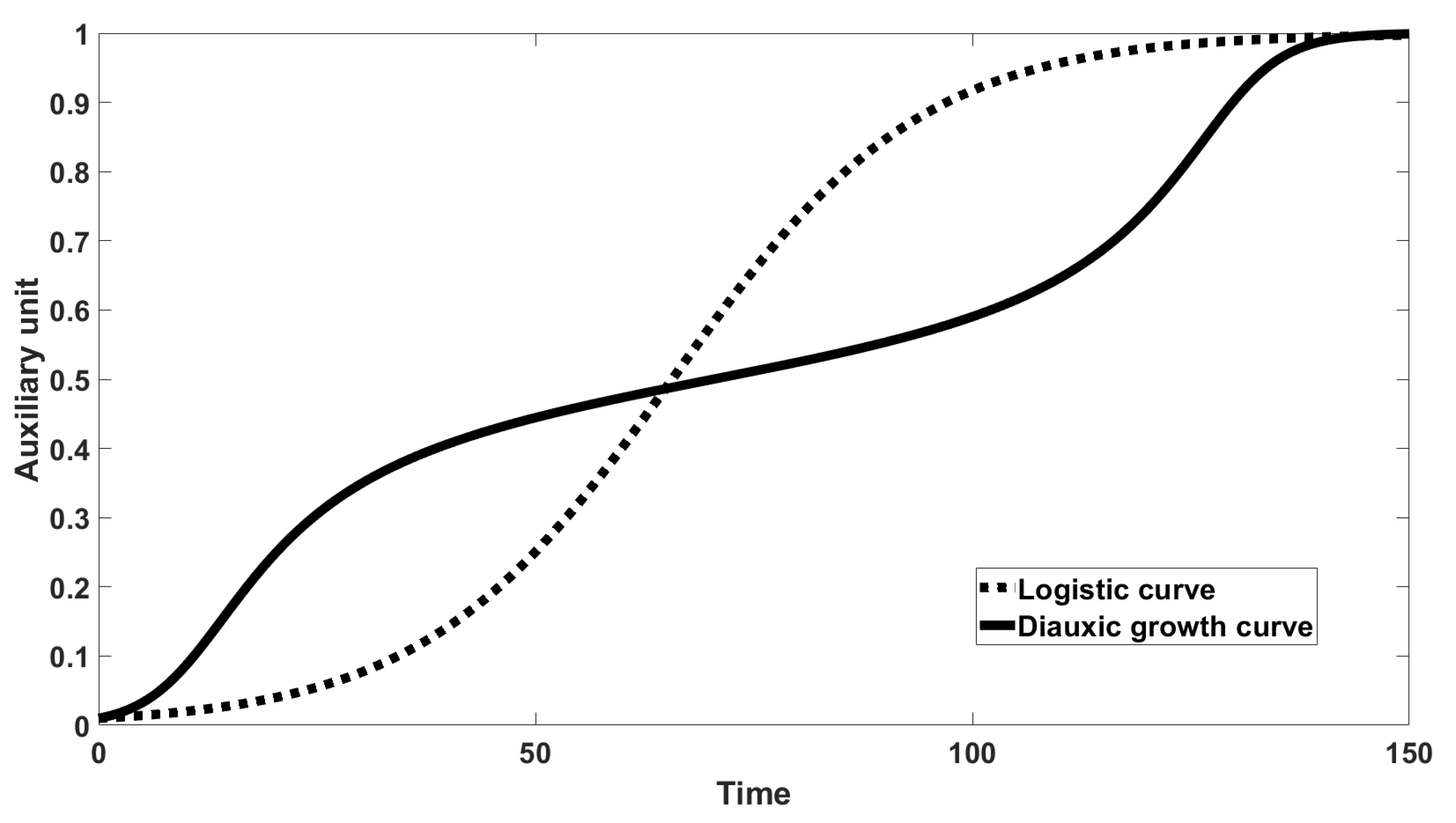
S, or sigmoid, shape. In more mathematical terms a single inflection point is present. In some cases, however, a more complex behavior is observed. That was pointed out in 1949 by Monod—see [
4], page 390—“
This phenomenon is characterized by a double growth cycle consisting of two exponential phases separated by a phase during which the growth rate passes through a minimum, even becoming negative in some cases”. Monod referred such a behavior to the growth of bacterial cultures and called it—diauxie. The similar effect was hypothesized in the analysis of a role for the CDC6 protein in the entry of cells into mitosis—see [
5]. Based on the experimental data in [
5], a new hypothesis that CDC6 slows down the activation of inactive complexes of CDK1 and cyclin B upon mitotic entry was formulated and the corresponding mathematical model was developed. Another example is the process of DNA melting in the case when the possible base pairs of AT (or TA) and of CG (or GC) appear in two separate groups composed only of AT and CG—see Figure 7.14, page 205, in [
6].
In mathematical terms, we can refer to diauxic growth, if the corresponding increasing bounded function has more than one single inflection point. The first mathematical description of such a behavior is contained in [
7].
One may note that the data of total cases of COVID–19, according to Johns Hopkins University, in September 2020, show the curves with more than one inflection points in cases of various European countries, like Spain, Italy, France, Germany, and UK. On the other hand, countries like Brazil, Chile, and South Africa display curves closed to the logistic growth (with only one inflection point).
The comparison between the logistic curve and the curve with diauxic growth is presented in
Figure 1.
In the present paper, we apply
Definition 1. An increasing bounded and positive-valued real function is said to have a diauxic growth if its number of inflection points is bigger than one.
Although the diauxic growth can be related, similarly to the logistic one, to the macroscopic scale one may ask whether the models on mesoscopic or microscopic scales (cf. [
8]) can result in a diauxic growth. The present paper is the first step towards the developing of the mesoscopic models that lead to a diauxic growth at the macroscopic scale. We propose various nonlinear mesoscopic models, both conservative and not, which lead directly to some diauxic growths.
3. Mesoscopic Model
We study the time–evolution of the probability density
f. The function
is the distribution of an internal, microscopic state
at time
of a (
statistical or
test) agent,
is a domain in
,
. Such a description then has a mesoscopic nature. An arbitrary vector
can be related to a biological state, activity, opinion (e.g., political opinion), a social state of a test agent, etc.—cf. [
8,
11,
12,
13,
14] and references therein. The model has therefore a wide range of possible applications in various applied sciences, such as biology, medicine, social, or political sciences.
The time evolution is defined by the general nonlinear integro–differential Boltzmann-like equation, see [
14] and references therein,
where
The nonlinear operator
Q describes interactions between agents causing the change of state. The turning rate
measures the rate for an agent with state
u to change it into
v. A simpler equation, with two possible states only, was studied in [
15]—see also [
8].
The modeling process leads to a proper choice of the turning rate.
Case 1. Letwhere is here a given integer. The rate of transition from state
u to state
v is proportional to the
–th power of actual probability of state
v. The higher is the probability, the larger is the chance of the change. The interaction kernel
corresponds to the tendency of agents to change a state. In particular, it may restrict the interactions only to states that are close each to other—see Ref. [
16]. The (sensitivity) parameter
describes the level of sensitivity of interactions: The greater is
the more sensitive interactions are.
The models defined by Case 1 were proposed in [
14], and then studied in various directions in [
16,
17,
18]. Ref. [
14] proposed results of global existence in the space homogeneous case for
, whereas
was considered in [
16,
17,
18]. Assuming
for symmetric
yields a trivial model. Thus it was excluded as it is stated in Case 1. The detailed information on the modeling leading to Case 1 can be found in [
19] (see also references therein), where it was referred to the conformist society.
We consider the following equation
with
Independently we consider the following two, formally more general, kinetic equations
Case 2. Letwhere γ is an integer. The terms can be interpreted as the transition probabilities of changing from state v to u caused by interaction with agents with states , ,..., whereas as rate of interaction between the agent with state v and agents with states ,...,.
One may note that Equations (
9) and (
11), under suitable symmetry assumption, can be directly related with the dynamics of
N interacting agents in the limit
—see [
8,
13]. The former may be related to the interactions between
agents, whereas the latter to interactions between
j agents, with
and
corresponds to a stochastic change without any interaction—see [
13]. One may note, however, that Equation (
11) can be directly reduced to Equation (
9) just taking
for each
. On the other hand, thanks to the conservative properties, Equation (
9) results in Equation (
11) as well, under a suitable choice of
A and
. For these reasons we concentrate on Equation (
11) only.
The -norm is denoted by .
We may state the following local existence–uniqueness result for solutions to Equation (
7).
Proposition 1. If is a probability density such that , then there exists such that the solution to (7) exists and is unique in on the interval . The solution preserves positivity and -norm (i.e., it is a probability density) on . Moreover, The first part of proof follows from [
14]—see [
19]—based on the Lipschitz property of the corresponding operator. The rest follows by
a priori estimates.
From [
16,
17,
18,
19,
20] we see that the behavior of the solution to Equation (
7) may be very complex and may lead to various interesting applications in biology, medicine, and social sciences.
In contrast to Equation (
7) with
, Equation (
7) with
(for asymmetric
), as well as Equations (
9) and (
11) result in the global existence–uniqueness of solutions.
Proposition 2. Let and Equation (13) be satisfied. If is a probability density then for any the solution to (7) exists and is unique in on the interval . The solution preserves positivity and -norm (i.e., it is a probability density) on . We consider the following conservative situation
Proposition 3. Let Assumption 1 be satisfied. If is a probability density then for any the solution to Equation (11) exists and is unique in on the interval . The solution preserves positivity and -norm (i.e., it is a probability density) on . Corollary 1. The solutions in Propositions 2 and 3 are in on every compact provided that .
The proofs of Propositions 2 and 3 are standard and based on the Lipschitz property in
—cf. [
20]. Similarly Corollary 1 follows.
Moreover, we need the smoothness of the solutions. Let
and
be the Banach spaces—the classical Sobolev space (a subspace of
) and the space of
m–differentiable functions with the usual norms denoted by
and
, respectively—see [
21].
Let
,
, and
be defined
In particular, for , we write and .
Proposition 4. Let the assumption of Proposition 1 be satisfied and additionally andfor some . Then the solution (given by Proposition 1) satisfies for all . 4. Macroscopic Behavior in the Conservative Case
In the present section we fix our attention on the behavior of the cumulative distribution function corresponding to the solution of a (mesoscopic) kinetic equation.
For simplicity we assume that and , however possible generalizations are straightforward.
We show that, for particular assumptions on the parameters
,
,
, of Equation (
11), the solution
leads to the distribution
that possesses a diauxic growth with respect to
, for any sufficiently large
.
Assumption 2. We assume the interactions such thatwhere , , are positive constants, (we keep in mind that ), with the standard convention, i.e., if , then means , if , then means , if , then means , andwhere is a given constant and ζ is a increasing function such that and . We may note, that Assumption 2 implies Assumption 1.
By Equation (
17) and simple calculations, we obtain
for
j equal 1, 2 and
, and any
and
Moreover, for any
such that
,
, by Equations (
17) and (
18), we have
where
and
Finally, for any
such that
, by Equations (
19) and (
20), for any
we have
By the above calculations, integrating Equation (
11) with respect to
u, we can see that any solution
f of Equation (
11), corresponding to an initial datum that is a probability density, is such that
given by Equation (
16), for any fixed
, satisfies the following equation
where
where
u is treated here as a (fixed) parameter.
Therefore, it is easy to see that the parameters of the model can be chosen in such a way that possesses a diauxic growth for any fixed sufficiently large u. We then obtain
Corollary 2. Let Assumption 2 be satisfied and be a probability density on . The solution to Equation (11), given by Proposition 3, is such that the corresponding given by Equation (16) has a diauxic growth with respect to t, for any sufficiently large . 5. Macroscopic Behavior in the Nonconservative Case
In order to adapt to a situation typical in game theory—cf.
Section 2, we replace Assumption 1 by the following more general statement.
In this section, we deal with the macroscopic behavior derived by the mesoscopic structures defined in the previous section.
We decompose
, where
and
are arbitrary (Lebesgue) measurable sets such that
, both with positive (Lebesgue) measures. For a given solution
f of the mesoscopic equation we are interested in the behavior of
that can be related to
and
, cf. Equation (
4), as well as
that can be related to
in the macroscopic description, cf. Equation (
1) with Equation (
5).
Similarly to that of [
22], we assume a direct dependence of the rate
on the unknown function
f in Equation (
11). This is a Enskog-type of assumption known in kinetic theory—cf. [
23] and references therein.
Assume now that the payoffs
, see
Section 2, are such that the corresponding Equation (
1) with Equation (
5) result in solutions that have a diauxic growth—cf. [
7]. Then the kinetic Equation (
11) leads to diauxic growth of (
28) if Assumption 4 is satisfied. In fact
Theorem 1. Let Assumption 4 be satisfied and be nonnegative and such that Then, for any , there exists a unique solution of Equation (11) in . Moreover it is possible to choose the payoffs in such a way that (28) given by the solution has a diauxic growth. Proof. It is standard to see that the operator defined by the right-hand-side of Equation (
11) is locally Lipschitz continuous in
. Then a local in time solution
exists in
and it is unique. It is also standard that the solution preserves nonnegativity of the initial datum. We observe that
and
satisfy Equation (
4) on the interval of time of existence of the solution. Therefore
satisfies Equation (
1) on the same time interval. By the form of Equation (
4), we observe that any solution of Equation (
4) must be bounded on any compact interval. This delivers an
a priori estimate of the
-norm of the solution, which concludes the proof. □
Remark 1. For simplicity, we assumed at the beginning that all payoffs were nonnegative. It is easy to see that Assumption 4 can be easily modified to cover the case if any of payoffs is negative.



{kind=link}
