Abstract
In this paper, modulo periodic Poisson stable functions have been newly introduced. Quasilinear differential equations with modulo periodic Poisson stable coefficients are under investigation. The existence and uniqueness of asymptotically stable modulo periodic Poisson stable solutions have been proved. Numerical simulations, which illustrate the theoretical results are provided.
1. Introduction
The theory of differential equations is a doctrine on oscillations and recurrence, which are basic in science and technique. Oscillations are most preferable in engineering [1], while recurrence originates in celestial mechanics [2]. The ultimate recurrence is the Poisson stability [3,4,5]. Presently, needs for functions with irregular behavior are exceptionally strong in neuroscience and celestial dynamics, which is still in the developing mode. In the present research, we have decided to combine periodic dynamics with the phenomenon of Poisson stability. That is, one of simplest forms of oscillations is amalgamated with the most sophisticated type of recurrence. We hope that the choice can give a new push for the nonlinear analysis, which faces challenging problems of the real world and industry. The present product of the design are modulo periodic Poisson stable functions.
In paper [6], to strengthen the role of recurrence as a chaotic ingredient we have extended the Poisson stability to the unpredictability property. Thus, the Poincaré chaos has been determined, and one can say that the unpredictability implies chaos now. The unpredictable point of the Bebutov dynamics is the unpredictable function. In papers [7,8,9,10,11,12,13,14,15], we provided a dynamical method, how to construct Poisson stable functions. Deterministic and stochastic dynamics have been used. Deterministically unpredictable functions have been constructed as solutions of hybrid systems, consisting of discrete and differential equations [9,13,14], and randomly they are results of the Bernoulli process inserted into a linear differential equation [7,10,16]. Unpredictable oscillations in neural networks have been researched in [7,13,17,18,19].
In papers [8,9,10,14] and books [7,13], discussing existence of unpredictable solutions, we have developed a new method how to approve Poisson stable solutions, since unpredictable functions are a subset of Poisson stable functions, and to verify the unpredictability one must check, if the Poisson stability is valid. The method is distinctly different than the comparability method by character of recurrence, which was introduced in [20] and later has been realized in several articles [21,22,23,24,25,26,27]. Unlike papers [7,8,9,10,13,14,15,16,17,18,19], the present research is busy with the new type of Poisson stable functions. Correspondingly, it is the first time in literature, when quasilinear equations with Poisson stable coefficients are under investigation. Finally, the systems are approved with modulo periodic Poisson stable solutions. The newly invented method of verification of the Poisson stability joined with the presence of the periodic components in the recurrence has made possible the extension for the class of studied differential equations. In papers [21,22,23,24], quasilinear systems are with constant matrices of coefficients, and in our case, we research systems with periodic and, even with Poisson stable coefficients. Another significant novelty is the numerical simulation of the Poisson stable functions and solutions [7,9,13,14]. We believe that altogether, the present suggestions can shape a new interesting science direction, not only in the theoretical study of differential equations, but also they provide rich opportunities for applications in mechanics, electronics, artificial neural networks, neuroscience.
2. Preliminaries
Throughout the paper, and will stand for the set of real and natural numbers, respectively. Additionally, the norm where will be used. Correspondingly, for a square matrix the norm will be used.
Definition 1
([5]). A continuous and bounded function is called Poisson stable, if there exists a sequence which diverges to infinity such that the sequence converges to uniformly on bounded intervals of
The sequence in the last definition is said to be Poisson sequence of the function
By Lemma A1 in the Appendix A, for a positive fixed there exist a subsequence of the Poisson sequence and a number such that as We shall call the number as the Poisson shift for the Poisson sequence with respect to the It is not difficult to find that for the fixed the set of all Poisson shifts, is not empty, and it can consist of several and even infinite number elements. The number is said to be the Poisson number for the Poisson sequence with respect to the number
Definition 2.
The sum is said to be a modulo periodic Poisson stable () function, if is a continuous periodic and is a Poisson stable functions.
We shall call the function the periodic component and the function the Poisson component of the function in what follows.
Remark 1.
Duo to Lemma A3, an function is a Poisson stable if equals zero. Otherwise, without loss of generality, the sequence converges on all compact subsets of the real axis to the function where is a nonzero Poisson shift for the sequence Since of the periodicity of the function one can accept the last convergence as a special form of recurrence. In the next section, we shall consider it as a result of Theorem 1.
3. Main Results
3.1. Linear System of Differential Equations
Consider the following system
where and are continuous functions, is a continuous matrix.
We assume that the following conditions are satisfied.
- (C1)
- is an periodic matrix for a fixed positive
- (C2)
- is an periodic function, and is a Poisson stable function with a Poisson sequence
- (C3)
- the Poisson number for the sequence is equal to zero.
According to Definition 2 and condition (C2), the sum is an function, i.e., the linear system (1) is with perturbation.
Let us consider the homogeneous system, associated with (1),
Let , is the fundamental matrix of the system (2) such that and I is the identical matrix. Moreover, is transition matrix of the system (2), which equal to and for all
We assume that the following additional assumption is valid.
- (C4)
- The multipliers of the system (2) in modulus are less than one.
It follows from the last condition that there exist positive numbers and such that
for [28].
Lemma 1.
If the inequality (3) is satisfied, then the following estimation is correct
for and arbitrary real number
Proof.
Since
we have that
That is why,
Since the lemma is proved. □
Theorem 1.
Assume that conditions (C1), (C2) and (C4) are valid. Then the system (1) admits a unique asymptotically stable solution.
Proof.
The bounded solution of system (1) has the form [28]
One can write that where and
It is not difficult to show that the function is periodic [29].
Next, we prove that the function is Poisson stable. Fix arbitrary positive number and interval We will show that for a large k it is true that on Let us choose two numbers c and such that and is positive, satisfying the following inequalities,
and
with By applying condition (C4), without loss of generality, for sufficiently large k we obtain that for all and for Using Lemma 1 we attain that
Now, the inequalities (6) to (8) imply that for Therefore, the sequence uniformly converges to on each bounded interval. Thus, according to the Definition 2 the solution of the system (1) is function with the periodic component and the Poisson component The asymptotic stability of the solution can be verified in the same way as for the bounded solution of a linear inhomogeneous system [29]. □
The following examples show the validity of the obtained theoretical result.
Example 1.
Let us consider the following linear inhomogeneous system,
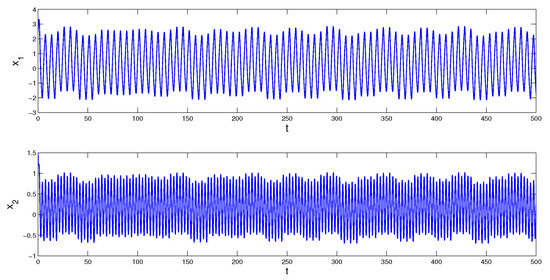
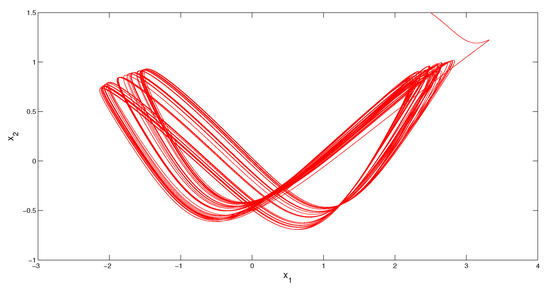
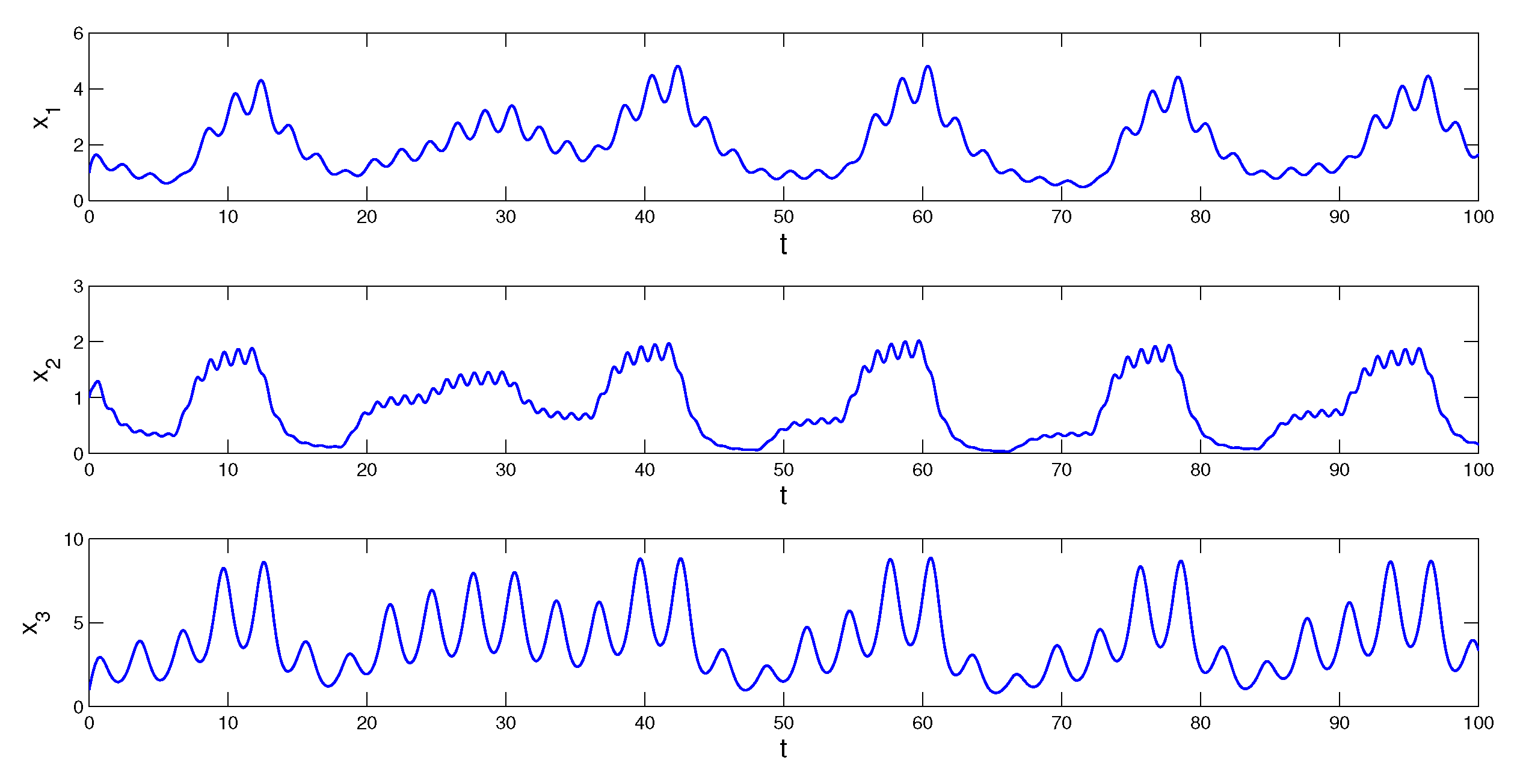
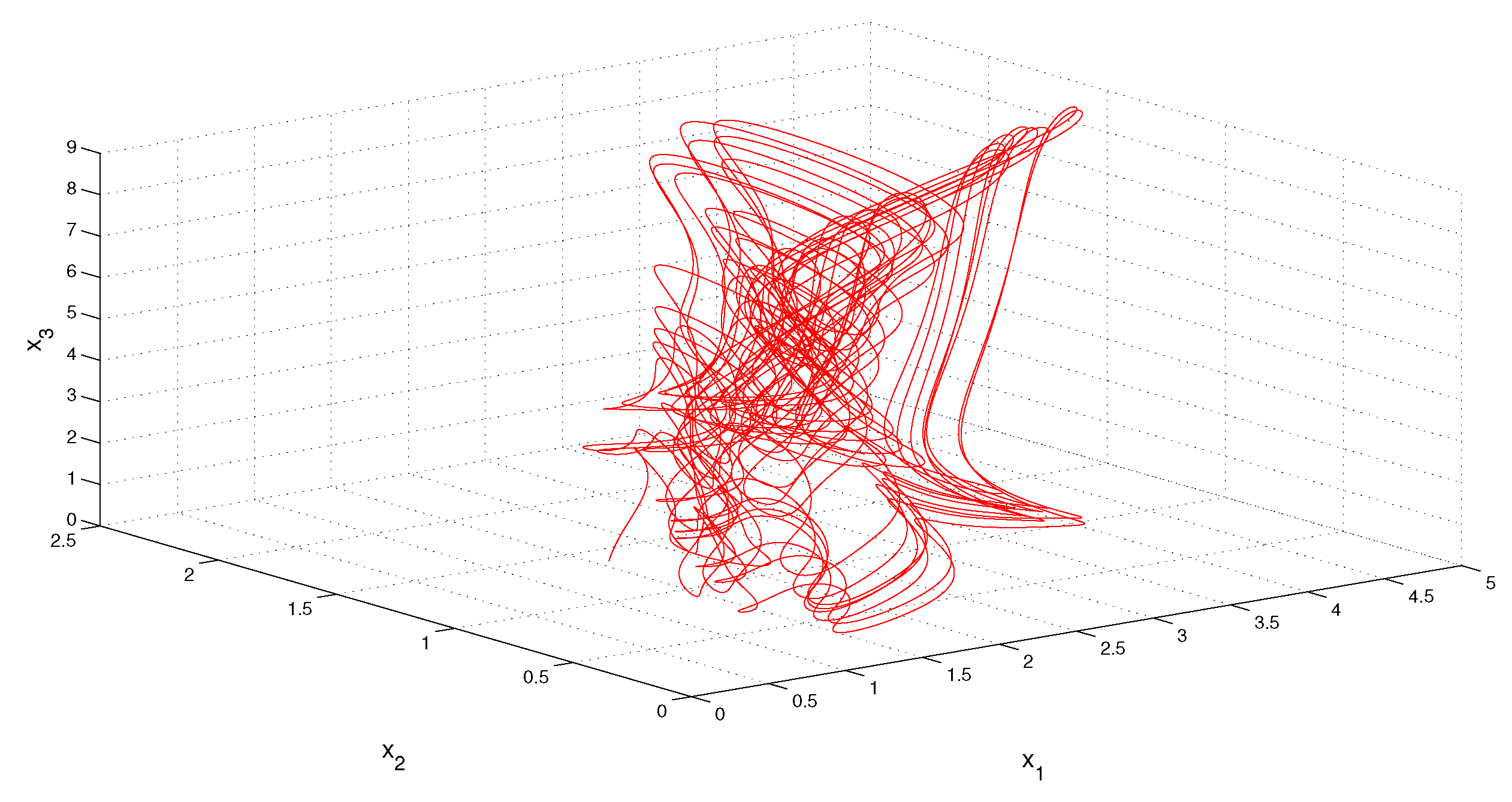
where is the Poisson stable function described in Appendix B. The perturbation is an function with the periodic component and the Poisson component The common period of the coefficient and the periodic component is Since the function is constructed on the intervals for the Poisson sequence of the function there exists a subsequence such that Therefore, the Poisson number Condition (C4) is valid with the multipliers and According to Theorem 1, the system admits a unique asymptotically stable solution, Since it is impossible to determine the initial value of the solution, we simulate a solution, which asymptotically approaches as time increases. We depict in Figure 1 the coordinates of the solution with initial values and which visualizes the MPPS solution approximately. In Figure 2 the trajectory of the solution is shown.
Figure 1.
Coordinates of the solution of system (9) with initial values and which asymptotically converge to the coordinates of the solution of the system.
Figure 2.
The trajectory of the solution of the Equation (9), which asymptotically approaches the MPPS solution of the system.
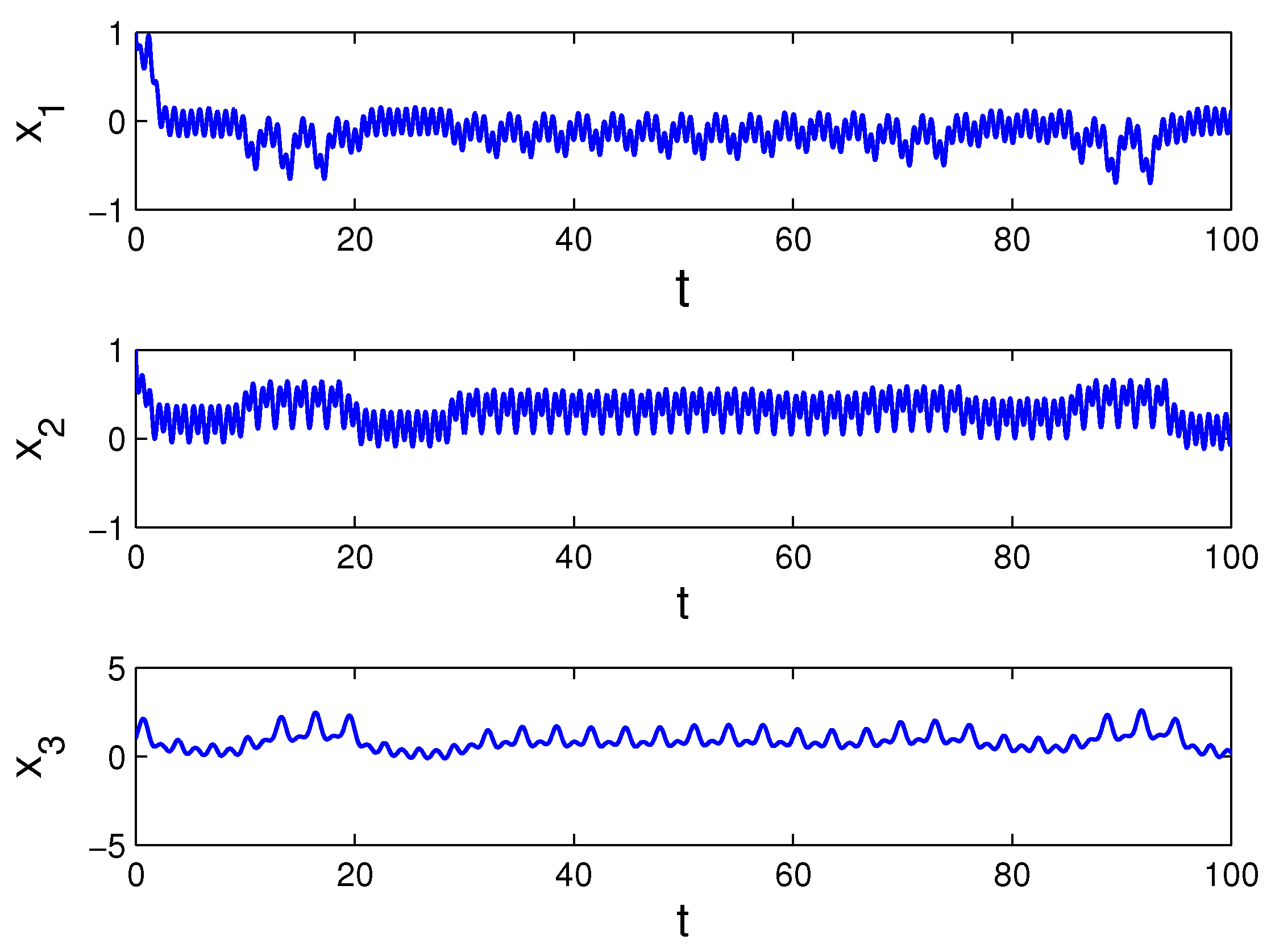
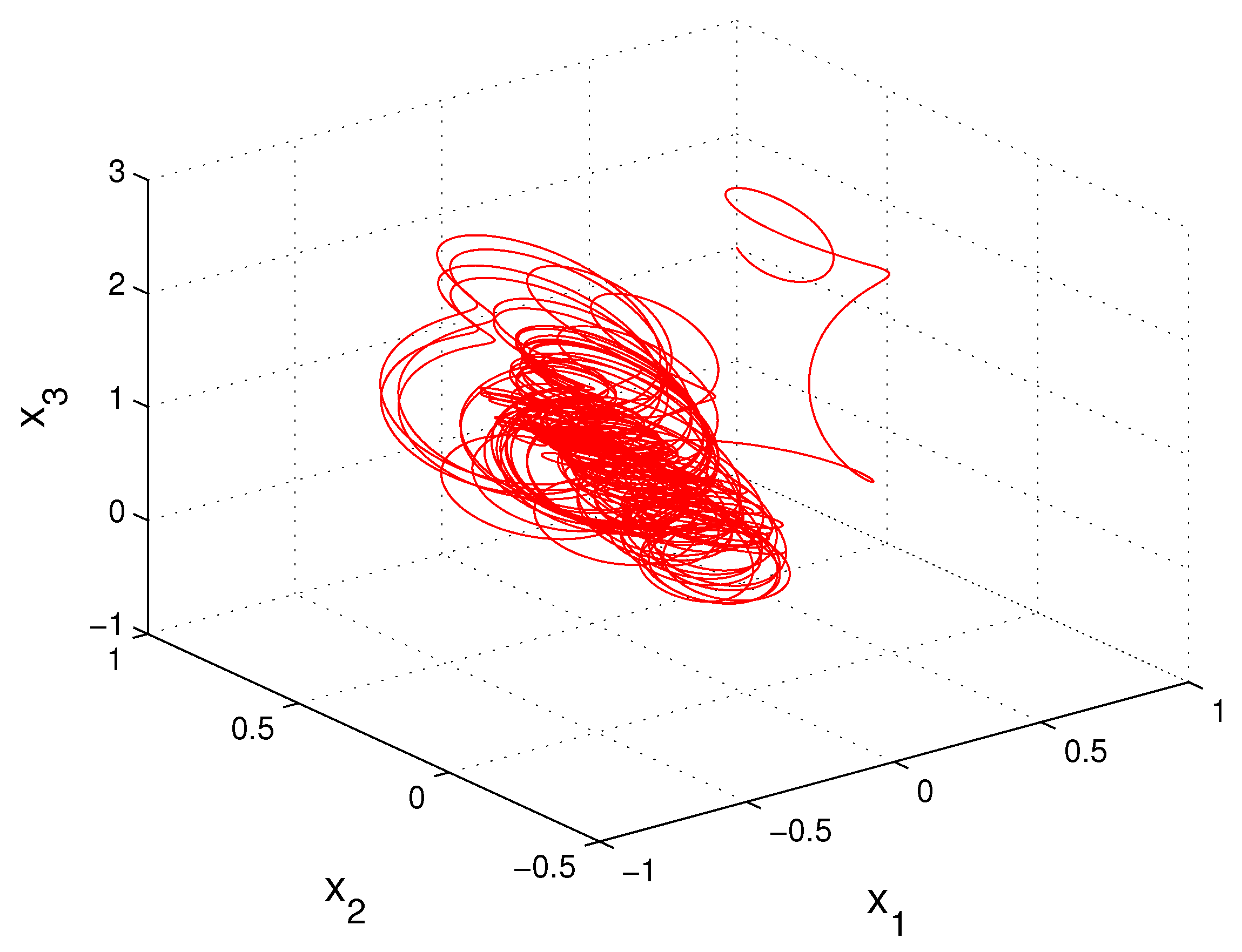
In the next example, the periodic component of the MPPS perturbation is absent, but the condition is correct, since a constant function is of arbitrary period. It is remarkable to say that the absence of a proper non-constant periodic component makes the dynamics more irregular, this is seen in Figure 3 and Figure 4.
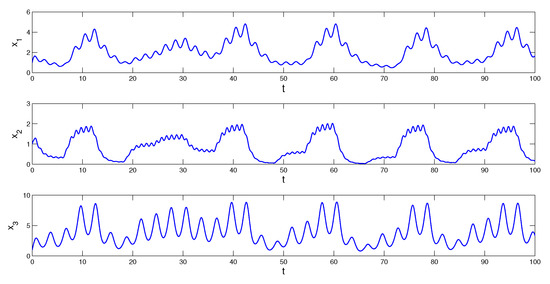
Figure 3.
Coordinates of the solution with initial values and which asymptotically converge to the coordinates of the solution of system (10).
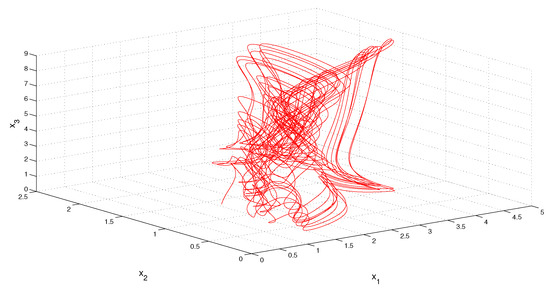
Figure 4.
The trajectory of the solution, of Equation (10), which asymptotically approaches the MPPS solution of the equation.
Example 2.
Consider the inhomogeneous linear system
where The conditions (C1)–(C3) are satisfied, and condition (C4) is valid with multipliers and Consequently, there exists the unique asymptotically stable MPPS solution of the system (10). Figure 3 presents the coordinates of the solution with initial values and The coordinates of solution approximate the coordinates of the solution. The trajectory of the solution is shown in Figure 4.
3.2. Quasilinear Differential Equations
The main object of the present section is the system of quasilinear differential equations
where n is a fixed natural number; is dimensional square matrix and satisfies to the condition (C1) and inequality (3); where H is a fixed positive number; the functions and satisfy conditions (C2) and (C3).
The following conditions on system (11) are required.
- (C5)
- the function is continuous and periodic in
- (C6)
- there exists a positive constant L such that for all
We denote and
The following additional conditions will be needed:
- (C7)
- (C8)
For simplicity, we use the notation in what follows.
According to [28], a bounded on the real axis function is a solution of (11), if and only if it satisfies the equation
Theorem 2.
If conditions (C1)–(C8) are valid, then the system (11) possesses a unique asymptotically stable Poisson stable solution.
Proof.
Let is the Poisson sequence of the function in the system (11). We denote by B the set of all Poisson stable functions with common Poisson sequence which satisfy
Let us show that the B is a complete space. Consider a Cauchy sequence in B, which converges to a limit function on . We have that
for a fixed closed and bounded interval Now, one can take sufficiently large m and k such that each term on the right hand-side of (13) is smaller than for a fixed positive and , i.e., the sequence uniformly converges to on Likewise, one can check that the limit function is uniformly continuous [28]. The completeness of B is shown.
Define the operator on B such that
Fix a function that belongs to B. We have that
for all Therefore, by the condition (C7) it is true that .
Fix a positive number and an interval Let us choose two numbers and satisfying the inequalities
and
Using the condition (C4) and Lemmas A3 and A5 from Appendix A, without loss of generality, we obtain that for all and for and sufficiently large Then, applying the inequality (4), we obtain:
for all From inequalities (15)–(17) it follows that for Therefore, uniformly converges to on bounded interval of
It is easy to verify that is a uniformly continuous function, since its derivative is a uniformly bounded function on the real axis. Summarizing the above discussion, the set B is invariant for the operator .
We proceed to show that the operator is contractive. Let and be members of B. Then, we obtain that
for all Therefore, the inequality holds, and according to the condition the operator is contractive.
By the contraction mapping theorem there exists the unique fixed point, of the operator which is the unique bounded Poisson stable solution of the system (11).
Finally, we will study the asymptotic stability of the Poisson stable solution of the system (11). It is true that
for
Let be another solution of system (11). One can write
Making use of the relation
we obtain that
Now, applying Gronwall–Bellman Lemma, one can attain that
The last inequality and condition (C8) confirm that the Poisson stable solution is asymptotically stable. The theorem is proved. □
Remark 2.
According to the Lemma A4 in the Appendix A, the Poisson stable solution of the system (11) is an function.
Example 3.
Consider the quasilinear system.
where is the Poisson stable function, which described similarly to that in Appendix B. Since, the piecewise constant function is given on intervals for the Poisson sequence of the function there exists a subsequence such that that is the condition (C3) is valid. The common period of the matrix and functions is equal to We have that the function is continuous and periodic in t and satisfies condition (C6) with The sum of and is an function, which meets conditions (C2), (C3). The assumptions (C4)–(C8) are valid with and Thus, all conditions for the last theorem have been verified, and there is the Poisson stable solution of the system, which is asymptotically stable.
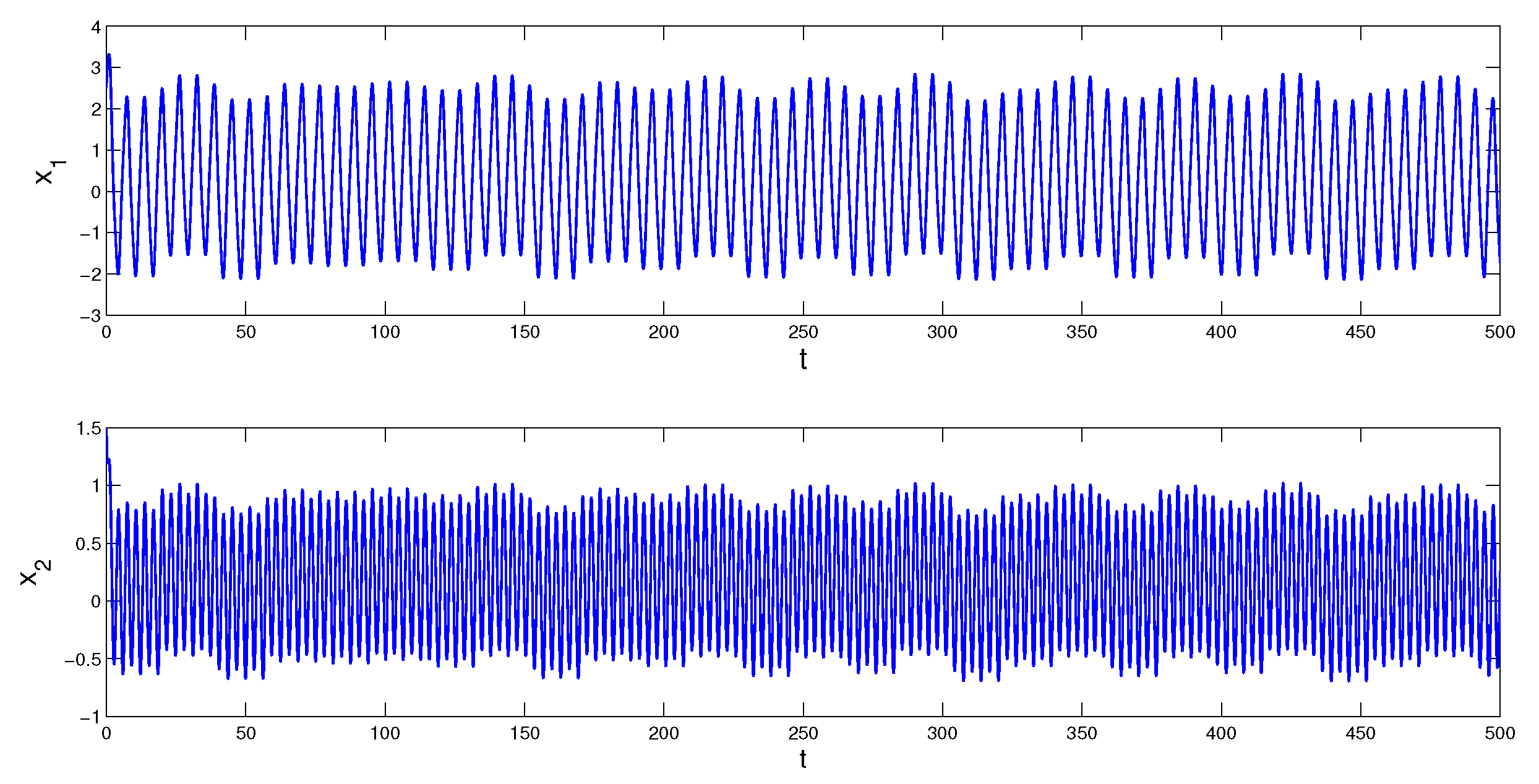
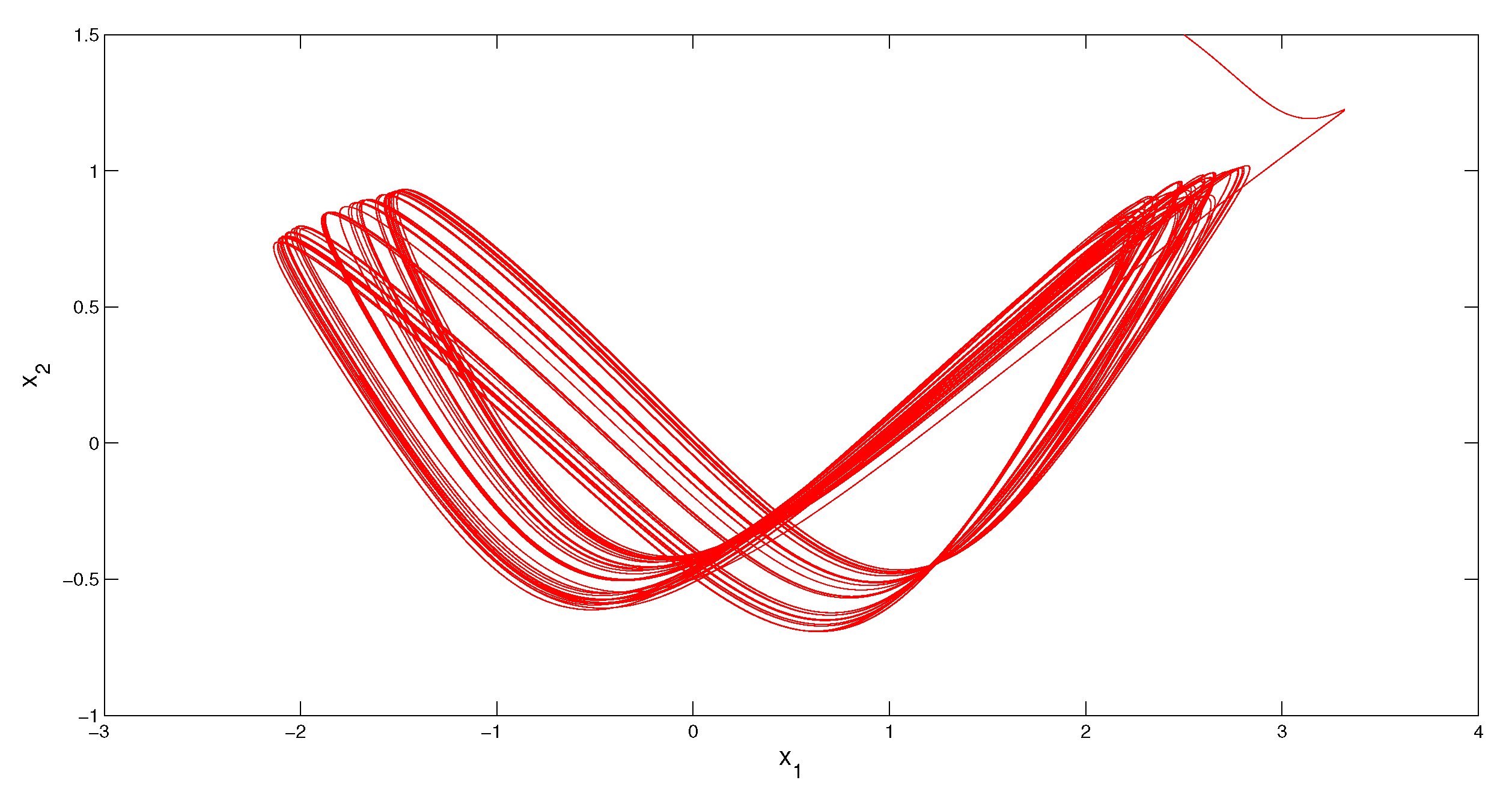
It is worth noting that the simulation of the Poisson stable solution, is not possible, since the initial value is not known precisely. For this reason, we will consider the solution of the system (19), with initial values and Using the inequality (18) one can obtain that for The last inequality shows that decreases exponentially. Consequently, the graph of the solution asymptotically approaches the Poisson stable solution of the system (19), as time increases. The Figure 5 demonstrates the coordinates of the solution which illustrate the Poisson stability of the system (19). In the Figure 6 the trajectory of the function is depicted.
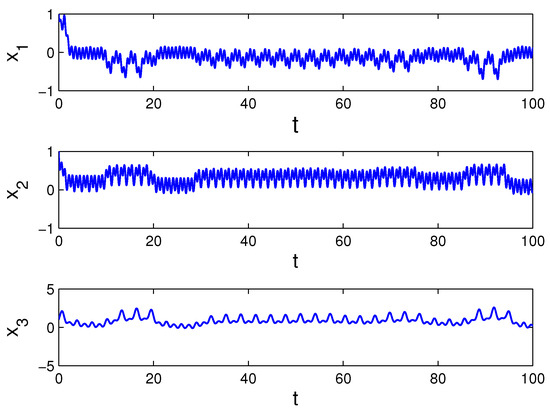
Figure 5.
The coordinates of the solution with which is asymptotic for the Poisson stable solution of the system (19).
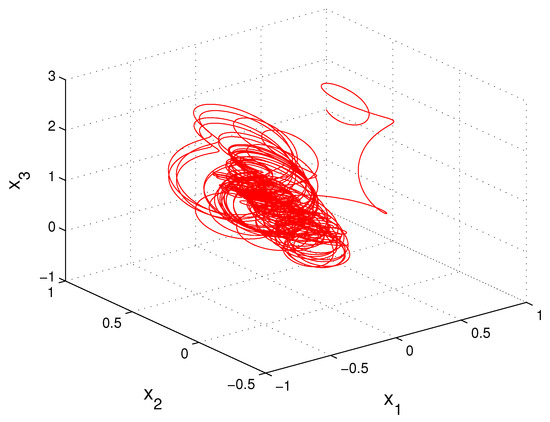
Figure 6.
The trajectory of the solution with which illustrates the Poisson stability of the system (19).
3.3. A Case with MPPS Coefficients
Let us consider the quasilinear Equation (11) with where is a continuous periodic matrix, and is a Poisson stable matrix with the Poisson sequence That is, the coefficient is an matrix and the system (11) is of the form
where the functions and satisfy conditions (C2) and (C3) and their sum is an function. The function satisfies conditions (C5), (C6).
Denote and rewrite the system (20) as
The homogeneous periodic system, associated with (20),
has the fundamental matrix and the transition matrix
Assume that the following assumptions are valid.
- (C9)
- The multipliers of the system (22) are in modulus less than one.
From the condition (C9) we have that there exist positive numbers and such that
for
- (C10)
- (C11)
where
Theorem 3.
If conditions (C2), (C3), (C5), (C6), and (C9) to (C11) are hold, then system (20) admits a unique asymptotically stable Poisson stable solution.
Proof.
A bounded on the real axis function is a solution of (21), if and only if it satisfies the equation
Denote by the Banach space of all Poisson stable functions with common Poisson sequence The functions of space satisfies the condition
Introduce the operator on such that
Let us show that the space is invariant for the operator Fix a function from We have that
for all Condition (C11) implies that .
Next, we will use fixed positive number and an interval and two numbers and satisfying the following inequalities
and
Using the condition (C9) and Lemmas A3, A5 from Appendix A, we obtain that for all and for and sufficiently large Then, applying the inequality (4), we obtain
for all Hence, the inequalities (26)–(28) give that for Therefore, the sequence uniformly converges to on the bounded interval of Thus, we have shown that the operator is invariant in
Let us show that the operator is contractive. Fix members and of . It is true that
for all and condition (C10) implies that the operator is contractive.
Using the contraction mapping theorem, one can conclude that there exists a unique fixed point, of the operator which is the Poisson stable solution of the system (20). Let us investigate its stability.
If is a solution of the Equation (20), then
and
With the aid of the Gronwall–Bellman Lemma, one can verify that
Now, based on the condition (C10), we conclude that the Poisson stable solution of system (20) is asymptotically stable. The theorem is proved. □
4. Conclusions
In this paper, we have introduced a new type of recurrence, which is the sum of two compartments, periodic and Poisson stable functions. We call it as modulo periodic Poisson stable function. Sufficient conditions for the dynamics to be Poisson stable have been determined. The novelty is convenient for theoretical analysis of differential and discrete equations of various types. In the present paper, we study quasilinear ordinary differential equations. If one consider the periodic compartment in the Poisson stability, and achievements of the paper for simulations of the recurrence, the results create new productive opportunities in the research of mechanical, electronic dynamics and neuroscience. Concerning theoretical research, it is of strong interest to search for Poisson stability and its periodic components in such famous dynamics as Lorenz, Rössler and Chua attractors. Generally speaking, one can look for periodic components of any chaotic dynamics. The results can be applied in problems of optimization. The results can be applied for problems of optimization.
Author Contributions
M.A.: conceptualization; methodology; investigation. M.T.: investigation; supervision; writing—review and editing. A.Z.: software; investigation; writing—original draft. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Acknowledgments
M. Akhmet and A. Zhamanshin have been supported by 2247-A National Leading Researchers Program of TUBITAK, Turkey, N 120C138. M. Tleubergenova and A. Zhamanshin have been supported by the Science Committee of the Ministry of Education and Science of the Republic of Kazakhstan (grant No. AP09258737 and No. AP08856170).
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Lemma A1.
For arbitrary sequence of positive real numbers and a positive number ω there exist a subsequence and a number such that as
Proof.
Consider the sequence such that and for all The boundedness of the sequence implies that there exists a subsequence which converges to a number [30]. □
Lemma A2.
Proof.
Assume on the contrary that is not in Then there exists a strictly decreasing sequence in such that For each natural denote by a subsequence of such that as
Fix a sequence of positive numbers which converges to the zero. One can find numbers such that It is clear that as □
Remark A1.
The last assertion implies that if then there exists a subsequence such that as
Lemma A3.
If is an function, and then the function is Poisson stable.
Proof.
According to Lemma A2, there exists a subsequence which tends to zero in modulus as Without loss of generality assume that as Fix a positive number and bounded interval The periodic function is uniformly continuous on Consequently, there exists a number such that
for all and Moreover, there exists an integer such that
for This is why,
if and That is, the function is Poisson stable. □
Lemma A4.
Assume that is a Poisson stable function. If for some positive number then is function.
Proof.
Let us write where is a continuous periodic function. Since then the subtraction is Poisson stable by Lemma A3. □
Remark A2.
The last result is a source for the optimization problem how to choose the function and the period ω to minimize the difference In other words, the problem of approximation of Poisson stable functions with periodic ones. It is of exceptional interest for celestial mechanics [2].
Lemma A5.
Assume that a function is a Poisson stable function in t and satisfies the inequality where L is a positive constant, for all Moreover, is periodic in If the Poisson sequence and period ω are such that the Poisson number equals to the zero, then the function is Poisson stable.
Proof.
By the Lemma A2 there exists a subsequence such that as We assume, without loss of generality, that the sequence itself satisfies the condition as
Let us fix a positive number and a bounded interval Since of the property of the sequence we have that for sufficiently large it is true that for all and for and
for all That is, is Poisson stable function. □
Lemma A6.
Assume that a function is periodic in t and satisfies the inequality where L is a positive constant, for all Moreover, is a Poisson stable function. If the Poisson sequence and period ω are such that the Poisson number equals to the zero, then the function is Poisson stable.
Proof.
Since the Lemma A2 implies that there exists a subsequence such that as For simplicity, we assume that the sequence itself satisfies the condition as Therefore, uniformly converges to as for all and
Consequently, for arbitrarily fixed positive number and a bounded interval I one can find sufficiently large number k such that for all and for Finally, we have that
for all That is, is Poisson stable function. □
Lemma A7.
Assume that a function is Poisson stable in t and satisfies the inequality where L is a positive constant, for all Moreover, is a Poisson stable function. If there exists a Poisson sequence common for the functions and then the function is Poisson stable.
Proof.
Let us fix a positive number and a bounded interval Since is Poisson stable in and is Poisson stable function, there exists sufficiently large such that for all and for That is,
for all Thus, is Poisson stable function. □
Remark A3.
The last lemma implies, in particular, that sum and product of Poisson stable functions with common Poisson sequence are Poisson stable functions.
Appendix B
This part of the paper is about an example of the Poisson stable functions. The task is not an easy one, and there are very few constructively determined cases [4,5]. In our research, we use the dynamical approach of functions determination. One of the most familiar is of sin and cos functions as solutions of ordinary differential equations. We shall consider the Poisson function as a continuous component of solution for a hybrid system, which consists of a discrete equation and a simple differential equation, while discrete component can be accepted as a Poisson stable sequence. A significant element of the present study is visualization of the continuous Poisson stable solution through a neighboring it by an asymptotically close counterpart.
In [6] as a part of the result construction of a Poisson stable sequence was performed as the solution of the logistic equation
More precisely, it is proved that for each there exists a solution of Equation (A1) such that the sequence belongs to the interval and there exists a sequence which diverges to infinity such that as for each i in bounded intervals of integers.
Consider the following integral
where is a piecewise constant function defined on the real axis through the equation for It is convenient to consider the function as a unique bounded on the real axis solution of the equation In all next examples of the paper we use the function notation where q denotes the length of the intervals on which the function is built.
It is worth noting that is bounded on the hole real axis such that
Next, we will show that is a Poisson stable function.
Consider a fixed closed interval of the axis and a positive number Without loss of generality one can assume that a and b are integers. Let us fix a positive number and an integer which satisfy the following inequalities and Let n be a large natural number such that on Then for all we obtain that
Thus, as uniformly on the interval
References
- Minorsky, N. Introduction to Non-Linear Mechanics: Topological Methods, Analytical Methods, Non-Linear Resonance, Relaxation Oscillations; J.W. Edwards: Ann Arbor, MI, USA, 1947. [Google Scholar]
- Poincaré, H. New Methods of Celestial Mechanics, Volume I–III; Dover Publications: New York, NY, USA, 1957. [Google Scholar]
- Birkhoff, G.D. Dynamical Systems; Colloquium Publications: Providence, RI, USA, 1991. [Google Scholar]
- Nemytskii, V.V.; Stepanov, V.V. Qualitative Theory of Differential Equations; Princeton University Press: Princeton, NJ, USA, 1960. [Google Scholar]
- Sell, G.R. Topological Dynamics and Ordinary Differential Equations; Van Nostrand Reinhold Company: London, UK, 1971. [Google Scholar]
- Akhmet, M.; Fen, M.O. Unpredictable points and chaos. Commun. Nonlinear Sci. Nummer. Simulat. 2016, 40, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Akhmet, M. Domain Structured Dynamics: Unpredictability, Chaos, Randomness, Fractals, Differential Equations and Neural Networks; IOP Publishing: Bristol, UK, 2021. [Google Scholar]
- Akhmet, M.; Tleubergenova, M.; Fen, M.O.; Nugayeva, Z. Unpredictable solutions of linear impulsive systems. Mathematics 2020, 8, 1798. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Quasilinear differential equations with strongly unpredictable solutions. Carpathian J. Math. 2020, 36, 341–349. [Google Scholar] [CrossRef]
- Akhmet, M. A Novel Deterministic Chaos and Discrete Random Processes; ACM International Conference Proceeding Series; Association for Computing Machinery: New York, NY, USA, 2020; pp. 53–56. [Google Scholar]
- Akhmet, M.; Fen, M.O. Non-autonomous equations with unpredictable solutions. Commun. Nonlinear Sci. Nummer. Simulat. 2018, 59, 657–670. [Google Scholar] [CrossRef]
- Akhmet, M.; Fen, M.O.; Tleubergenova, M.; Zhamanshin, A. Unpredictable solutions of linear differential and discrete equations. Turk. J. Math. 2019, 43, 2377–2389. [Google Scholar] [CrossRef]
- Akhmet, M.U.; Fen, M.O.; Alejaily, E.M. Dynamics with Chaos and Fractals; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Akhmet, M.; Fen, M.O. Poincare chaos and unpredictable functions. Commun. Nonlinear Sci. Nummer. Simulat. 2017, 41, 85–94. [Google Scholar] [CrossRef] [Green Version]
- Akhmet, M.; Fen, M.O. Existence of unpredictable solutions and chaos. Turk. J. Math. 2017, 41, 254–266. [Google Scholar] [CrossRef]
- Akhmet, M.; Tola, A. Unpredictable strings. Kazakh Math. J. 2020, 20, 16–22. [Google Scholar]
- Akhmet, M.; Seilova, R.; Tleubergenova, M.; Zhamanshin, A. Shunting inhibitory cellular neural networks with strongly unpredictable oscillations. Commun. Nonlinear Sci. Nummer. Simulat. 2020, 89, 05287. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Nugayeva, Z. Strongly unpredictable oscillations of Hopfield-type neural networks. Mathematics 2020, 8, 1791. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Aruğaslan Çinçin, D.; Nugayeva, Z. Unpredictable oscillations for Hopfield-type neural networks with delayed and advanced arguments. Mathematics 2021, 9, 571. [Google Scholar] [CrossRef]
- Shcherbakov, B.A. Classification of Poisson-stable motions. Pseudo-recurrent motions. Dokl. Akad. Nauk SSSR (Russ.) 1962, 146, 322–324. [Google Scholar]
- Cheban, D.; Liu, Z. Periodic, quasi-periodic, almost periodic, almost automorphic, Birkhoff recurrent and Poisson stable solutions for stochastic differential equations. J. Differ. Equ. 2020, 268, 3652–3685. [Google Scholar] [CrossRef] [Green Version]
- Cheban, D.; Liu, Z. Poisson stable motions of monotone nonautonomous dynamical systems. Sci. China Math. 2019, 62, 1391–1418. [Google Scholar] [CrossRef] [Green Version]
- Shcherbakov, B.A. Topologic Dynamics and Poisson Stability of Solutions of Differential Equations; Stiinta: Chisinau, Moldova, 1972. [Google Scholar]
- Shcherbakov, B.A. Poisson stable solutions of differential equations, and topological dynamics (russian). Differ. Uravn. 1969, 5, 2144–2155. [Google Scholar]
- Shcherbakov, B.A. Recurrent solutions of differential equations. Dokl. Akad. Nauk SSSR (Russ.) 1966, 167, 1004–1007. [Google Scholar]
- Shcherbakov, B.A. The comparability of the motions of dynamical systems with regard to the nature of their recurrence (russian). Differ. Uravn. 1975, 11, 1246–1255. [Google Scholar]
- Shcherbakov, B.A. Poisson Stability of Motions of Dynamical Systems and Solutions of Differential Equations; Stiinta: Chisinau, Moldova, 1985. [Google Scholar]
- Hartman, P. Ordinary Differential Equations; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Farkas, M. Periodic Motion; Springer: New York, NY, USA, 1994. [Google Scholar]
- Haggarty, R. Fundamentals of Mathematical Analysis; Addison Wesley: Boston, MA, USA, 1993. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).