Abstract
In this article, a novel adaptive fixed-time neural network tracking control scheme for nonlinear interconnected systems is proposed. An adaptive backstepping technique is used to address unknown system uncertainties in the fixed-time settings. Neural networks are used to identify the unknown uncertainties. The study shows that, under the proposed control scheme, each state in the system can converge into small regions near zero with fixed-time convergence time via Lyapunov stability analysis. Finally, the simulation example is presented to demonstrate the effectiveness of the proposed approach. A step-by-step procedure for engineers in industry process applications is proposed.
1. Introduction
In actual industrial processes, after decades of development, several control strategies based on classical control theory and modern control theory have been developed. However, most of these control methods are based on single-input single-output linear systems. There are many nonlinear, uncertain, unmodeled dynamic problems in actual industrial processes that pose great challenges to the design of control systems. With the development of engineering automation requirements, the research of control strategies based on multi-input multi-output nonlinear systems has attracted growing attention. In recent decades, many control schemes have been proposed for stability analysis and the control for nonlinear systems, such as the adaptive technique [1,2,3], backstepping technique [4,5,6], U model control [7,8,9], sliding mode control [10,11,12], super twisting algorithm [13,14], neural network technique [6,15,16], etc. In particular, neural network technology has attracted many researchers’ attention because of the following aspects: (1) a neural network has the strong ability to learn any function and can approximate any nonlinear system, and (2) because of the self-learning ability of neural networks, the controller does not need much system model and parameter information, so neural network control can be widely used to solve the control problems caused by uncertain models [17]. In [18], the control problem of time-varying output constraints was investigated using the neural network technique. The use of adaptive neural network control for an uncertain nonlinear system with external disturbance was presented in [19]. In [20], neural network controller designs were presented for several classes of nonlinear systems, including single-input single-output nonlinear systems, strict feedback nonlinear systems, nonaffine nonlinear systems, and multi-input multi-output triangular nonlinear systems.
Most of the above research was proven based on Lyapunov stability theory. However, actual systems often have various disturbances that cannot strictly meet the definition of Lyapunov stability. To solve this problem, scholars have mainly introduced new concepts based on two aspects. On the one hand, the concept of input-to-state stability has been introduced; on the other hand, the concept of practical stability has been introduced with the aim of making systems stable in finite time. If a closed-loop system reaches a stable state in a limited time, it is called finite-time stability. Further, if a system meets the convergence time and does not depend on the initial parameters, it is called fixed-time stability. Compared with the traditional finite-time control method, the convergence time of the fixed-time control method is independent of the initial conditions. Exponential stability, finite-time stability, and fixed-time stability are all concepts related to the convergence rate of a system. They are very important for many control applications, such as the explosion of missiles. In [21], taking the stability analysis of a sliding mode control system as an example, input–output stability, finite-time stability, and fixed-time stability are introduced in detail. In [14], the convergence time of the super-twisting algorithm for a nonaffine nonlinear system was calculated. In [22], the finite time input–output stability of nonlinear systems is studied. In [23], a finite-time adaptive controller is designed for interconnected systems with time-varying output constraints to make the system stable in finite time, but the fixed-time convergence problem is not considered in this paper. The use of adaptive fixed-time tracking control for a strict feedback nonlinear system was studied in [24]. However, there are still many problems to be solved in these existing control strategies, such as state constraints, the adaptive backstepping “explosion” problem, and so on.
In the actual production process, many physical models, such as power systems, process control systems, and manipulator models, can be modeled as nonlinear interconnected systems. Because the interconnected terms between nonlinear interconnected subsystems are unknown, it is physically difficult to obtain this information through sensors, and it requires significant computer resources. Therefore, designing a reliable control scheme for nonlinear interconnected systems is a challenging task. The adaptive decentralized control scheme for interconnected nonlinear systems was discussed in [25]. In [26], the robust adaptive tracking control scheme was proposed for uncertain interconnected nonlinear systems. In [27], the use of adaptive neural control for high-order interconnected systems was examined.
Based on the above analysis, the main goal of this article is to design an adaptive fixed-time neural network tracking controller for nonlinear interconnected systems. The main contributions of this paper are as follows:
- (1)
- The combination of fixed-time control and neural network adaptive control for nonlinear interconnected systems.
- (2)
- A fixed-time low pass filter is designed to solve the “explosion of complexity” based on backstepping control technology.
- (3)
- A fixed-time controller is designed, which contains the convergence time of the error system, weights of neural networks, and a low pass filter system.
The article is organized into the following sections. A nonlinear interconnected mathematical description of the problem is presented in Section 2, the adaptive fixed-time neural network control scheme for a class of nonlinear interconnected systems is proposed in Section 3, two simulation examples are provided to show the reliability of the presented control scheme in Section 4, and finally, some conclusions are given in Section 5.
2. Problem Formation and Preliminaries
Consider the interconnected nonlinear system:
where is the state of the interconnected nonlinear system; is the state vector of the system; is the known smooth function; is the unknown smooth function; is the output of the system; is the corresponding control input of the system; the desired trajectory and its derivative are continuous and bounded.
Remark 1:
In the next section, we introduce a neural network adaptive control method based on the fixed-time stability theory. The objective of the method is for the nonlinear interconnected system output to be able to track the desired signal and maintain fixed-time stability based on the adaptive fixed-time neural network controller. The designed setting time does not rely on the initial parameters and can be realized only by adjusting the controller parameters.
3. Adaptive Fixed-Time Tracking Control System Design
3.1. Control System Design
In this section, the design of a fixed-time adaptive law for the error systems of neural networks will be presented. The tracking control system’s objective is to drive the error system to fixed-time stability. To solve the tracking control problem, the neural network adaptive controller, based on fixed-time Lyapunov stability theory for nonlinear interconnected systems, is presented. The adaptive fixed-time laws were designed to update the weights of the neural networks for the error systems. Neural networks were used to approximate unknown functions. The parameters of the neural networks were iteratively based on the Lyapunov fixed-time stability theorem. The convergence time can be designed by choosing controller parameters without the initial condition. Based on the controller, the error-closed loop system achieves Lyapunov fixed-time bounded stability, which means the output trajectory can track to the desired trajectory in fixed time.
Remark 2:
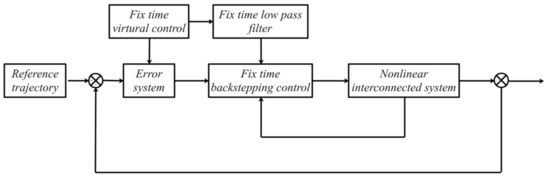
The control structure’s design for the closed loop system is shown in Figure 1. The states of the error system can be determined from the minus between the setting reference function and the actual output function of the nonlinear interconnected system.
Figure 1.
Control structure of the closed system.
3.2. Control System Analysis
Step 1: First, for the system i, the following variables are selected:
The dynamics of can be obtained as
Design the ideal virtual control as
where Select the virtual control and design the adaptive law as
where, and the error virtual control is
Therefore, based on system (3) and virtual control
where
and the dynamic error virtual control is
The Lyapunov candidate functional is chosen as
Differentiating with respect to time yields
Step m: the form of the tracking error is
The dynamics of can be obtained as
Design the ideal virtual control as
where Select the virtual control , and the adaptive law can be obtained as
where, and the error virtual control is
Therefore, based on system (13) and virtual control
where
and the dynamic error virtual control is
The Lyapunov candidate functional is chosen as
Differentiating with respect to time yields
Step n: the time derivative of can be described as
Based on dynamics and tracking errors, the dynamics of can be obtained as
Design the NNs’ approximate nonlinear systems as
where , , and is estimated by . The controller is designed as
where . Design the adaptive law as
where Therefore, based on system (23) and controller
the Lyapunov candidate functional is chosen as
Differentiating with respect to time yields
where . Based on Lemma 4, we have
where are real numbers, is determined by , and is determined by . Therefore, we have
Theorem 1.
For the interconnected nonlinear system (1), based on the feasible virtual control signal (5), (15) actual controller (25), and adaptive law (26), the error state between the system output and the desired function is fixed-time Lyapunov stability, and the setting time does not rely on the initial parameters.
Proof.
Based on the Lyapunov candidate functionals (10), (20), and (28), differentiating the Lyapunov functional with respect to time yields
(11), (21), and (31). Choosing the Lyapunov candidate functional as
and differentiating the Lyapunov functional with respect to time yields
where , and
By choosing the control parameters, we have
where
Therefore, the error system is fixed-time, practical, and stable. □
Remark 3:
From the definition of Lyapunov stability, Lyapunov stability, asymptotic stability, and finite-time stability are the three most basic concepts, and their definitions are progressive.
At present, the concepts of stability related to the convergence rate mainly include exponential stability, finite-time stability, and fixed-time stability. Exponential stability is the realization of asymptotic stability, while fixed-time stability is the generalization of finite-time stability. From the point of view of standard definitions, they are strictly distinguished, and from the point of view of controller design, they also have different forms.
From the perspective of system convergence time, Lyapunov stability can be divided into infinite-time stability and finite-time stability. In the theoretical analysis of stability, the most common exponential stability is infinite-time stability. Infinite-time stability means that when time tends to infinity, the system state can converge exponentially by designing the parameters of the controller. Finite-time stability means that the system can be stable at a certain time and continue to maintain a stable state by designing the parameters of the controller. For practical engineering control, finite-time stability is obviously more practical than infinite-time stability, but there are some limitations to finite-time stability; for instance, the convergence time of the designed system depends on the initial state. Therefore, in this section, another scheme was introduced: the tracking control method for nonlinear interconnected systems based on fixed-time stability theory. The setting time does not depend on the initial parameters and can be realized only by adjusting the controller parameters. In other words, under the condition that the controlled system is stable in fixed time, even if the initial parameters are changed, the controlled system can still be stable within the originally designed fixed time without redesigning the controller. This greatly improves the potential of the control method to be used in practical applications.
Remark 4:
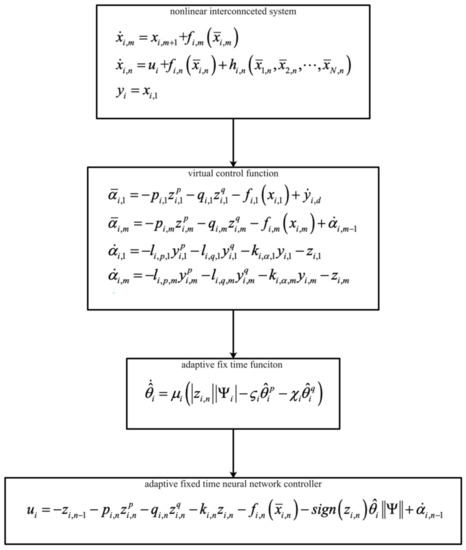
The design details are summarized in Figure 2. The above-listed step procedure is detailed below.
Figure 2.
Design procedure.
Step 1: Design of the ideal virtual control laws (4) and (14), based on backstepping control technology.
Step 2: Design of the virtual control laws (5) and (15), based on the fixed-time low pass filter.
Step 3: The actual controller (25) is obtained recursively through the virtual control signal and the adaptive parameter (26).
4. Numerical Examples
The main purposes of the simulation studies include: (1) validating the effectiveness of the adaptive fixed-time neural network tracking controller for nonlinear interconnected systems; (2) showing a step-by-step procedure for building the adaptive fixed-time tracking control system.
A. Numerical Example
Consider the following nonlinear interconnected system:
where the function, . .
Step 1: Design of the fixed-time ideal virtual control law and fixed-time adaptive law of neural networks:
Step 2: Design of the fixed-time low pass filter:
Step 3: The actual controller is obtained recursively through the virtual control signal and the adaptive parameter, and the control input is designed as
The initial condition is selected as The neural network consists of seven nodes, the centers , and the widths , respectively.
Figure 1 shows the control structure of the closed-loop system. Figure 2 shows the step-by-step design procedure. Figure 3, Figure 4 and Figure 5 are the simulation results. Figure 3 shows the output of the interconnected system and the output of the interconnected system’s convergence to the origin point in finite time, which indicates the control performance of the fixed-time neural network adaptive control. Figure 4 shows the controller of the interconnected system, which is bound and realizable. Figure 5 shows the trajectories of error of the low pass filter, and the error between the virtual control and ideal virtual control indicates that the virtual control is close to the ideal virtual control and that the differential coefficient exists. The simulation results show that the controlled system can become stable in 14 s, and the convergence time can be designed. Even if the states’ initial parameters change, the controlled system can still become stable in 14 s. The system includes unknown nonlinear functions, which verify that the neural network control scheme has strong adaptive ability and approximation ability.
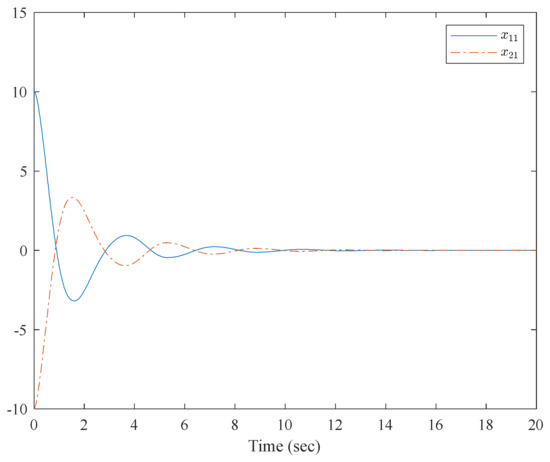
Figure 3.
Trajectories of and of the interconnected system.
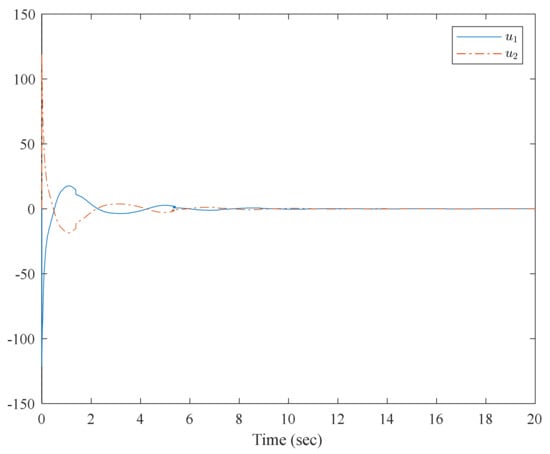
Figure 4.
Trajectories of the controller of the interconnected system.
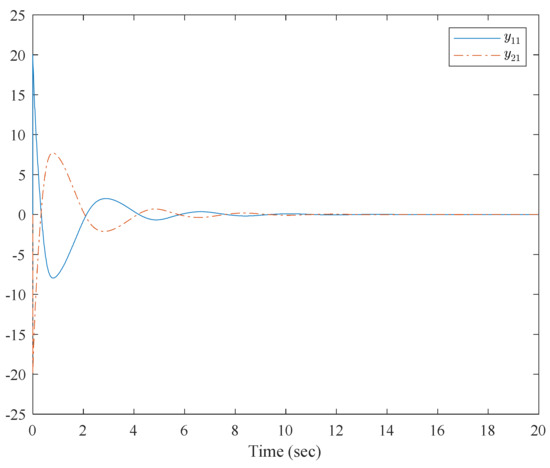
Figure 5.
Trajectories of error of the low pass filter.
B. Application Example
Consider a pendulum system [25], with two degrees, as an interconnected system (Figure 6), which has been used as an example of decentralized neural control.
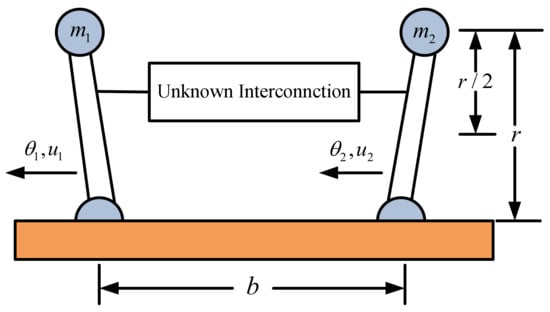
Figure 6.
Two inverted pendulums connected by an unknown device.
Step 1: Design of the fixed-time ideal virtual control law and fixed-time adaptive law of neural networks:
Step 2: Design of the fixed-time low pass filter:
Step 3: The actual controller is obtained recursively through the virtual control signal and the adaptive parameter, and the control input is designed as
The initial condition is selected, and , , , , , , , , and the function, . The neural network consists of seven nodes, the centers, and the widths, respectively.
The simulation results are shown in Figure 7, Figure 8, Figure 9 and Figure 10. From the simulation results, it can be seen that the system output can track the desired signal in 2.5 and 5 s, respectively, and the setting time can be designed. Even if the states’ initial parameter change, the controlled system can still become stable in the same time. The pendulum system includes unknown nonlinear functions, which verify that the neural network control scheme has strong adaptive ability and approximation ability. The pendulum system also includes interconnected items, which verify that the control scheme can be applied to interconnected nonlinear control systems.
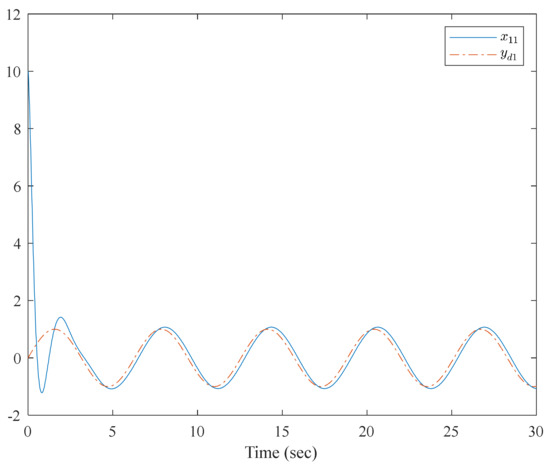
Figure 7.
Trajectories of and of the interconnected system.
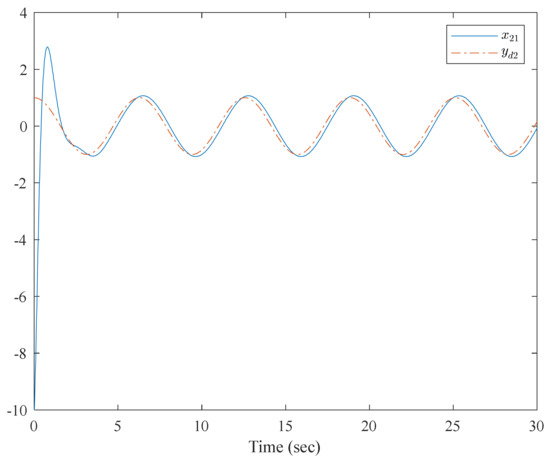
Figure 8.
Trajectories of and of the interconnected system.
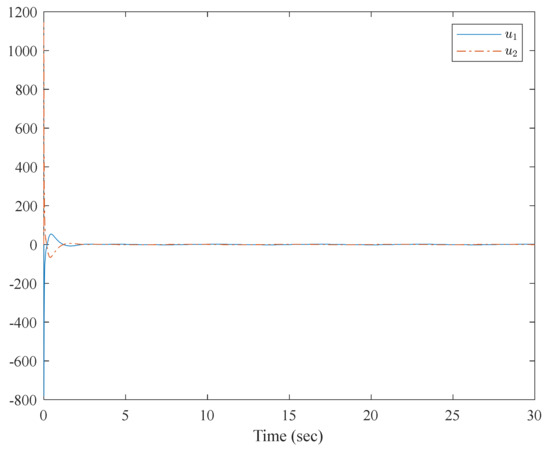
Figure 9.
Trajectories of the controller of the interconnected system.
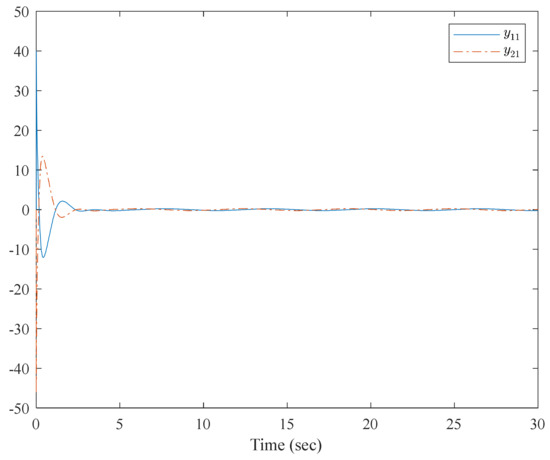
Figure 10.
Trajectories of error of the low pass filter.
5. Conclusions
In this paper, through the design of a timing adaptive law for a neural network error system based on the Lyapunov fixed-time stability theorem, the unknown parameters of neural networks are iterated in fixed time. The convergence time can be designed only by modifying the parameters of the system controller and the adaptive rate, and it does not depend on the initial conditions. The fixed-time Lyapunov stability theorem is proposed, and the strict mathematical proof is completed, which will have more practical significance than the ideal stability analysis based on Lyapunov stability theory. Furthermore, the algorithm flow chart is given, which can be used by engineers to realize the proposed tracking control method by a computer for practical engineering. However, the control scheme based on neural networks also has some limitations. Firstly, because it cannot guarantee the asymptotic stability of the system, it is suitable for the controlled system, whose control objective is bounded stability. Secondly, the pure feedback structure is more general than strict feedback, and pure feedback has more application value; therefore, pure feedback interconnected system fixed-time neural network control results should be presented in future works.
Author Contributions
Software, X.X. and C.S.C.; Writing—original draft, Y.L.; Writing—review & editing, J.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gao, W.; Jiang, Y.; Jiang, Z.P.; Chai, T. Output-Feedback Adaptive Optimal Control of Interconnected Systems Based on Robust Adaptive Dynamic Programming; Automatica Oxford: Oxford, UK, 2016. [Google Scholar]
- Gao, W.; Jiang, Z.P. Adaptive Dynamic Programming and Adaptive Optimal Output Regulation of Linear Systems. IEEE Trans. Autom. Control. 2016, 61, 4164–4169. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C.; Spurgeon, S.K. Decentralised robust sliding mode control for a class of nonlinear interconnected systems by static output feedback. Automatica 2004, 40, 613–620. [Google Scholar] [CrossRef]
- Zhang, J.H.; Li, Y.; Fei, W.B. Neural Network-Based Nonlinear Fixed-Time Adaptive Practical Tracking Control. for Quadrotor Unmanned Aerial Vehicles. Complexity 2020, 2020, 13. [Google Scholar] [CrossRef]
- Tong, S.C.; Min, X.; Li, Y.X. Observer-Based Adaptive Fuzzy Tracking Control. for Strict-Feedback Nonlinear Systems with Unknown Control. Gain Functions. IEEE Trans. Cybern. 2020, 50, 3903–3913. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, Q.; Li, Y.; Wu, X. Homeomorphism Mapping Based Neural Networks for Finite Time Constraint Control of a Class of Nonaffine Pure-Feedback Nonlinear Systems. Complexity 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Y.; Fei, W.; Wu, X. U-Model Based Adaptive Neural Networks Fixed-Time Backstepping Control for Uncertain Nonlinear System. Math. Probl. Eng. 2020, 2020, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Q.M.; Zhao, D.; Zhang, J. A general U-block model-based design procedure for nonlinear polynomial control systems. Int. J. Syst. Sci. 2016, 47, 3465–3475. [Google Scholar] [CrossRef]
- Li, R.; Zhu, Q.; Narayan, P.; Yue, A.; Yao, Y.; Deng, M. U-Model-Based Two-Degree-of-Freedom Internal Model Control of Nonlinear Dynamic Systems. Entropy 2021, 23, 169. [Google Scholar] [CrossRef]
- Yu, X.; Man, Z. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2009, 49, 261–264. [Google Scholar]
- Muñoz, D.; Sbarbaro, D. An adaptive sliding-mode controller for discrete nonlinear systems. IEEE Trans. Ind. Electron. 2000, 47, 574–581. [Google Scholar] [CrossRef]
- Da, F. Decentralized sliding mode adaptive controller design based on fuzzy neural networks for interconnected uncertain nonlinear systems. IEEE Trans. Neural Netw. 2000, 11, 1471–1480. [Google Scholar]
- Moreno, J.A.; Osorio, M. Strict Lyapunov Functions for the Super-Twisting Algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, Q.; Li, Y. Convergence Time Calculation for Supertwisting Algorithm and Application for Nonaffine Nonlinear Systems. Complexity 2019, 2019, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Ge, S.S.; Cong, W. Adaptive neural control of uncertain MIMO nonlinear systems. IEEE Trans. Neural Netw. 2004, 15, 674–692. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, Q.; Wu, X.; Li, Y. A generalized indirect adaptive neural networks backstepping control procedure for a class of non-affine nonlinear systems with pure-feedback prototype. Neurocomputing 2013, 121, 131–139. [Google Scholar] [CrossRef]
- Pan, J.; Qu, L.; Peng, K. Sensor and Actuator Fault Diagnosis for Robot Joint Based on Deep CNN. Entropy 2021, 23, 751. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Huang, H.; Ge, S.S. Adaptive Neural Network Control of a Robotic Manipulator With Time-Varying Output Constraints. IEEE Trans. Cybern. 2017, 47, 3136–3147. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Huang, R.; Li, X.; Liu, S. Adaptive neural network control of uncertain robotic manipulators with external disturbance and time-varying output constraints. Neurocomputing 2019, 323, 108–116. [Google Scholar] [CrossRef]
- Ge, S.S.; Hang, C.C.; Lee, T.H.; Zhang, T. Stable Adaptive Neural Network Control; Springer: New York, NY, USA, 2002. [Google Scholar]
- Polyakov, A.; Fridman, L. Stability notions and Lyapunov functions for sliding mode control systems. J. Frankl. Inst. 2014, 351, 1831–1865. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Ji, H. A three-dimensional robust nonlinear terminal guidance law with ISS finite-time convergence. Int. J. Control 2016, 89, 938–949. [Google Scholar] [CrossRef]
- Du, P.; Liang, H.; Zhao, S.; Ahn, C.K. Neural-Based Decentralized Adaptive Finite-Time Control for Nonlinear Large-Scale Systems With Time-Varying Output Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3136–3147. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, J.; Ye, X.; Chin, C. Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems. Entropy 2021, 23, 963. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Liu, W.; Qiu, J.; Liu, P.X. Adaptive Fuzzy Decentralized Control for a Class of Strong Interconnected Nonlinear Systems with Unmodeled Dynamics. IEEE Trans. Fuzzy Syst. 2018, 26, 836–846. [Google Scholar] [CrossRef]
- Li, X.; Yang, G. Neural-Network-Based Adaptive Decentralized Fault-Tolerant Control for a Class of Interconnected Nonlinear Systems. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 144–155. [Google Scholar] [CrossRef] [PubMed]
- Si, W.; Dong, X.; Yang, F. Decentralized adaptive neural control for high-order interconnected stochastic nonlinear time-delay systems with unknown system dynamics. Neural Netw. 2018, 99, 123–133. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).