1. Introduction
The analytical solution, also known as the exact solution, can accurately solve the partial differential equations( PDEs) [
1,
2,
3,
4], but it is quite difficult for us to obtain analytical solutions. The analytical solution may even be limited to some special types of PDEs. In such a context, it is very necessary and significant to study the numerical solution of PDEs. Compared with traditional numerical methods such as the finite difference method, finite volume method, finite element method, spectral method and so on, lattice Boltzmann method (LBM) is a novel numerical method with unique advantages, such as simple programming, easy treatment of boundary conditions and fit for parallel computing.
As a mesoscopic numerical simulation method, LBM has made some progress in the past 30 years [
5,
6]. With time and space made discrete, LBM is macroscopically discrete. However, LBM is microscopically continuous, which satisfies the conservation of mass, momentum conservation and energy conservation. The macroscopic equation can be correctly recovered by LBM. LBM attracts more and more experts and scholars’ attention internationally. Researchers mainly use LBM to simulate fluid flow [
7,
8] and solve PDEs [
9,
10,
11,
12,
13,
14].
Lai and Ma [
9] presented a lattice Boltzmann (LB) model for fourth order generalized Kuramoto-Sivashinsky (GKS) equation, in which an amending function assumed to be second order of time step is applied to recover the GKS equation correctly. Hu and their collaborators [
10] developed a LB model to solve a generalized Gardner equation with time-dependent variable coefficients (TDVCs) by means of adding a compensation function to the evolution equation. In order to solve a class of PDEs with the order up to six, Chai et al. [
11] introduced some suitable auxiliary moments to study a general LB model. Lan et al. [
12] investigated a general propagation LB model and successfully simulated KdV-Burgers equation with TDVCs through adjusting the propagation step. Following the idea in the work of Chai and his collaborators, Qiao et al. [
13] recently proposed a novel LB model with an auxiliary source distribution function to solve the general fourth order PDEs. In our previous work [
14], a general propagation lattice Boltzmann model was developed to solve Boussinesq equations by selecting the appropriate parameters that affect the propagation process. In this work, we develop a unified lattice Boltzmann model for fourth order PDEs with TDVCs, so as to avoid the need to construct different models for different PDEs, including constant-coefficient PDEs and variable-coefficient PDEs. Furthermore, the equilibrium distribution functions and the compensation functions have a unified form for different PDEs according to our unified model. Based on our model and algorithm, the constant-coefficient KS equation, constant-coefficient GKS equation and variable-coefficient KdV equation, are successfully solved numerically.
We organize the paper as follows: a unified lattice Boltzmann model for fourth order partial differential equations with variable coefficients is proposed in
Section 2, where we give a detailed derivation and analysis process of important equations, such as the Chapman-Enskog analysis, the equilibrium distribution functions, the compensation functions and so on. In
Section 3, the algorithm for the present model and numerical results are shown. In the end,
Section 4 is a summary of this work.
2. A Unified Lattice Boltzmann Model for Fourth Order Partial Differential Equations with Variable Coefficients
A unified LB model for fourth order PDEs with TDVCs, i.e., Equation (
1) is investigated,
In Equation (
1),
represent spatial position and time, respectively,
is an unknown scalar function. It should be noticed that unlike previous work, the coefficients
in front of the partial derivative of space are functions of time, i.e., time-dependent variable coefficients, and
is a polynomial function of
u, such as
and so on.
2.1. A Unified Lattice Boltzmann Model for Fourth Order Partial Differential Equations with Variable Coefficients
As for Equation (
1), we introduce the discrete velocity lattice Boltzmann equation with Bhatnagar-Gross-Krook (BGK) collision operator, which satisfies this form:
where
and
are the local particle distribution function and the local equilibrium distribution function, respectively, and
is the single relaxation time. It should be noted that we append a compensation function
to recover Equation (
1) exactly. There are some other important parameters in Equation (
2), such as
representing the time step,
representing the lattice space step,
representing the discrete velocity. In this paper, we apply the simple and efficient D1Q5 velocity model. It means that the
and
, where c is a scale factor constant satisfying
.
We let
Applying Taylor expansion to Equation (
2) to
, and using Equations (
2) and (
3), we obtain
We apply Chapman-Enskog(C-E) expansion to Equation (
4) in space and time [
15]:
Substituting Equations (
5)–(
8) into Equation (
4), we derive the equations from
to
:
Using Equations (
9)–(
13), we obtain:
Simplifying Equation (
14), we have:
Coupling Equations (
15) and (
18), one can obtain:
Substituting Equations (
18) and (
19) into Equation (
16), we have:
Finally, with the help of Equations (
18)–(
20), we rewrite Equation (
17):
where:
and
should satisfy the constraint:
Using Equation (
9), we obtain:
We can recover the equation exactly with minimal truncation error if both
and
satisfy the following conditions:
Summing Equation (
18) over
k, and using Equations (
22) and (
23), we have:
Summing Equation (
19) over
k and applying Equations (
23)–(
29), one can obtain:
Summing Equation (
20) over
k and with the aim of Equations (
23)–(
30), we obtain:
Summing Equation (
21) over
k and coupling with Equations (
23)–(
31), we have:
Combining Equations (
32)–(
35) in order of
and assuming
, we are able to recover fourth order PDEs with TDVCs:
where the truncation error
of the model is:
2.2. Selecting Appropriate Equilibrium Distribution Functions and Compensation Functions
By solving Equations (
23)–(
27), the equilibrium distribution functions
are expressed by
Then, assuming
and solving Equations (
28)–(
31), the compensation functions
can be derived:
3. Numerical Solutions
Our numerical simulation is based on Algorithm 1. Some fourth order PDEs with TDVCs are simulated to verify the effectiveness and stability of the model. For the treatment of boundary conditions, we use the nonequilibrium extrapolation method [
16]. In addition, the initial and boundary value are determined by the exact solution. We apply global relative error (i.e., GRE) to measure error between the LBM solutions and the exact solutions.
| Algorithm 1: Numerical Simulation |
Set initial value: = the exact solution, compute and for r = 1 to Nt do for i = 1 to m + 1 do Compute Compute coefficients Compute and Collision end for Stream Compute Treat boundary condition end for
|
where
and
are the LBM solution and the exact solution, respectively,
L represents the number of lattices.
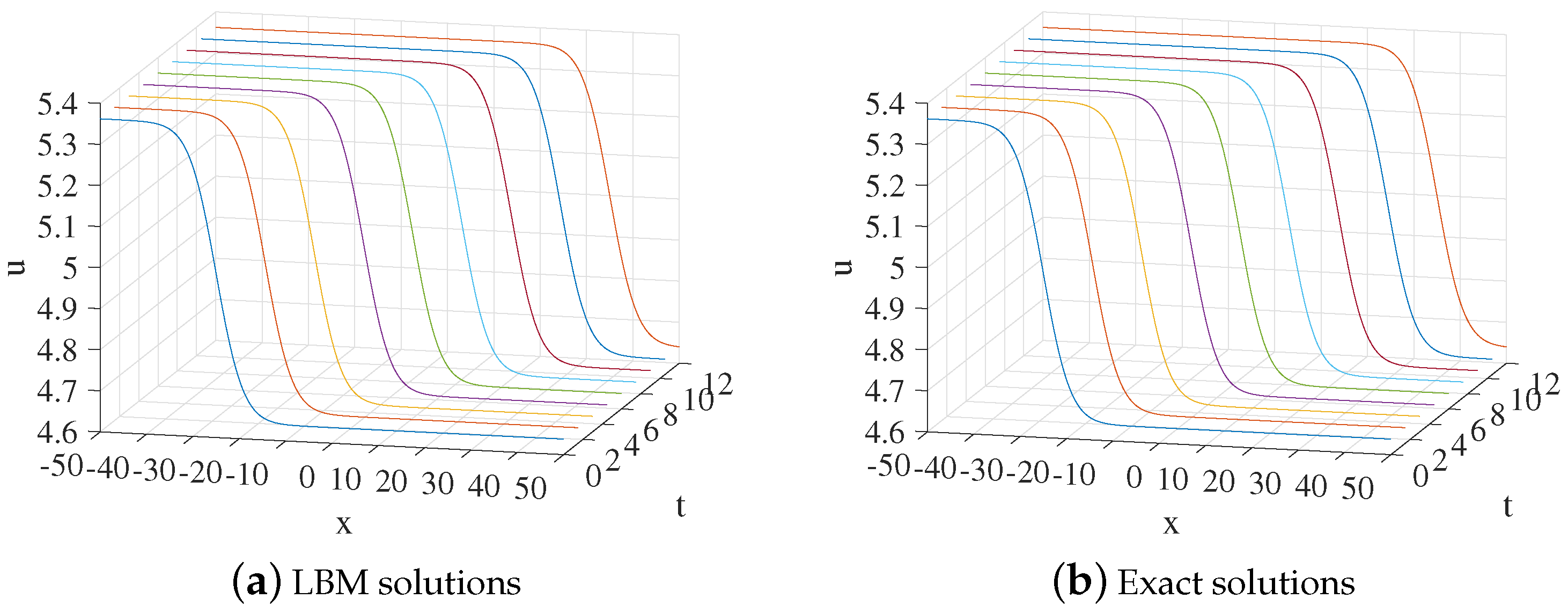
Example 1. Let , and Equation (1) is transformed into Kuramoto-Sivashinsky (KS) equation with such a form: We obtain the exact solution
of Equation (
49) by Ref. [
1]
In the simulation, we set
,
,
. Some other parameters in Equation (
50) are
, and
. The three-dimensional visual comparisons between the LBM solutions and exact solutions with time are shown in
Figure 1. We show the space-time evolution graph of the LBM solutions and exact solutions in
Figure 2. Besides, we compare the present model with the one in Ref. [
9]. We also list the GRE of two models at different times in
Table 1. It can find that our model is more accurate and performs better than the one in Ref. [
9]. Based on
Figure 1 and
Figure 2 and
Table 1, the LBM solutions and the exact solutions are in good agreement.
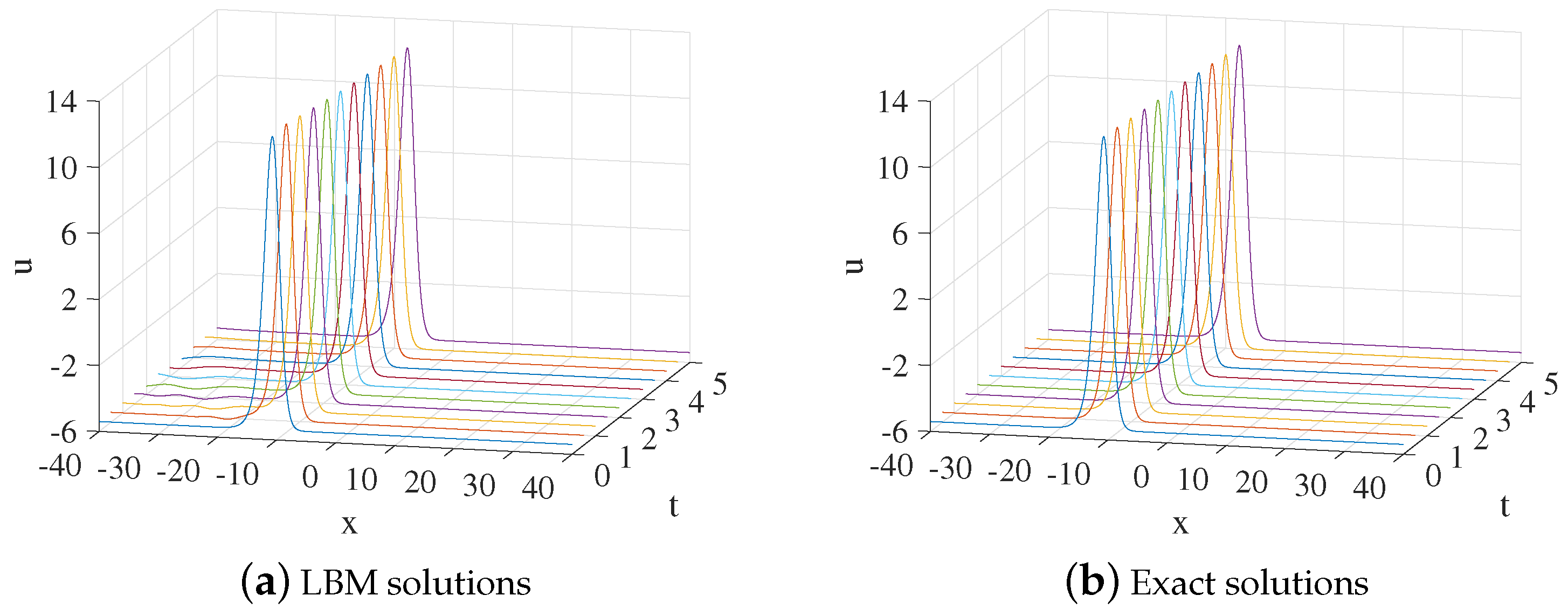
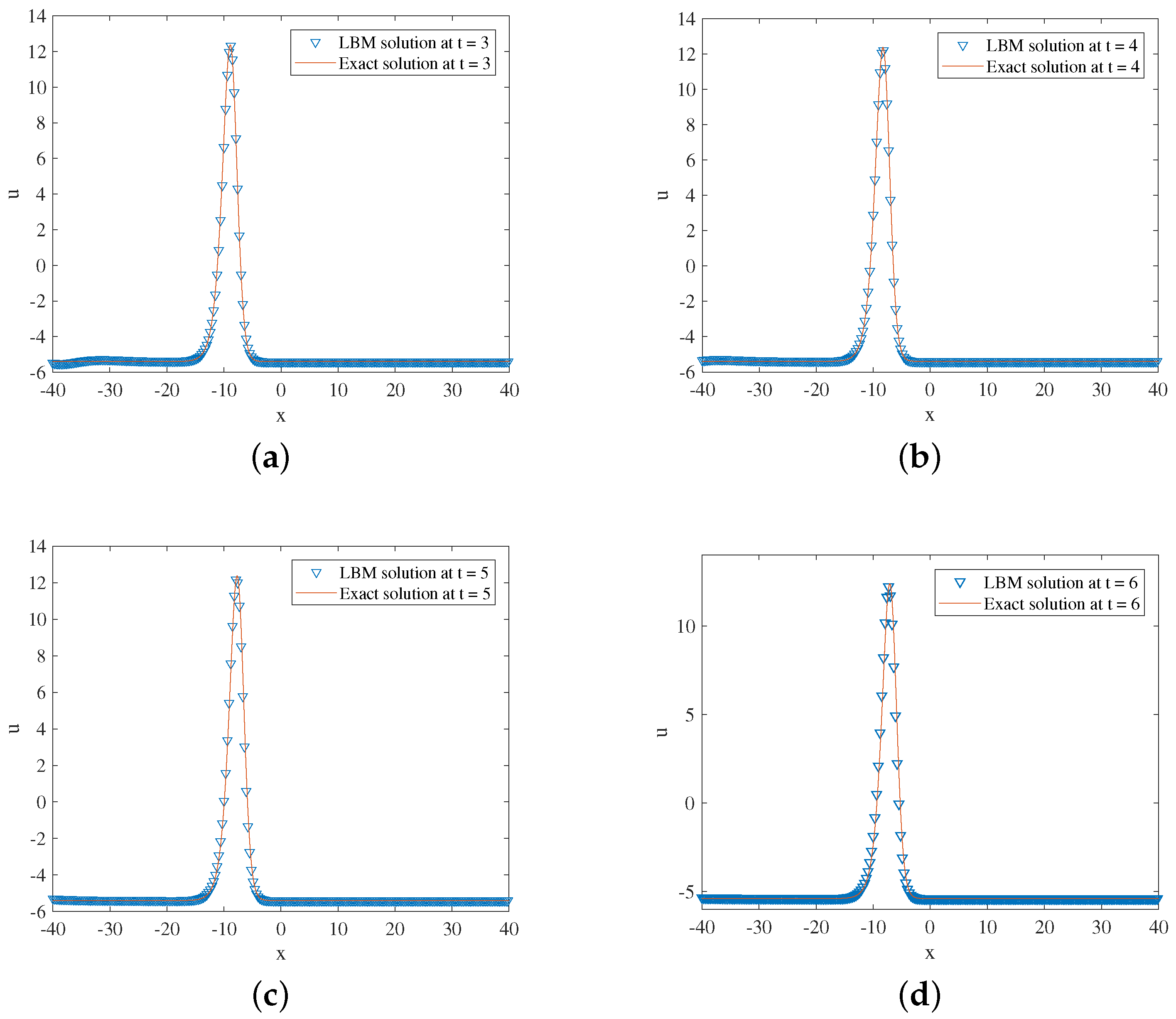
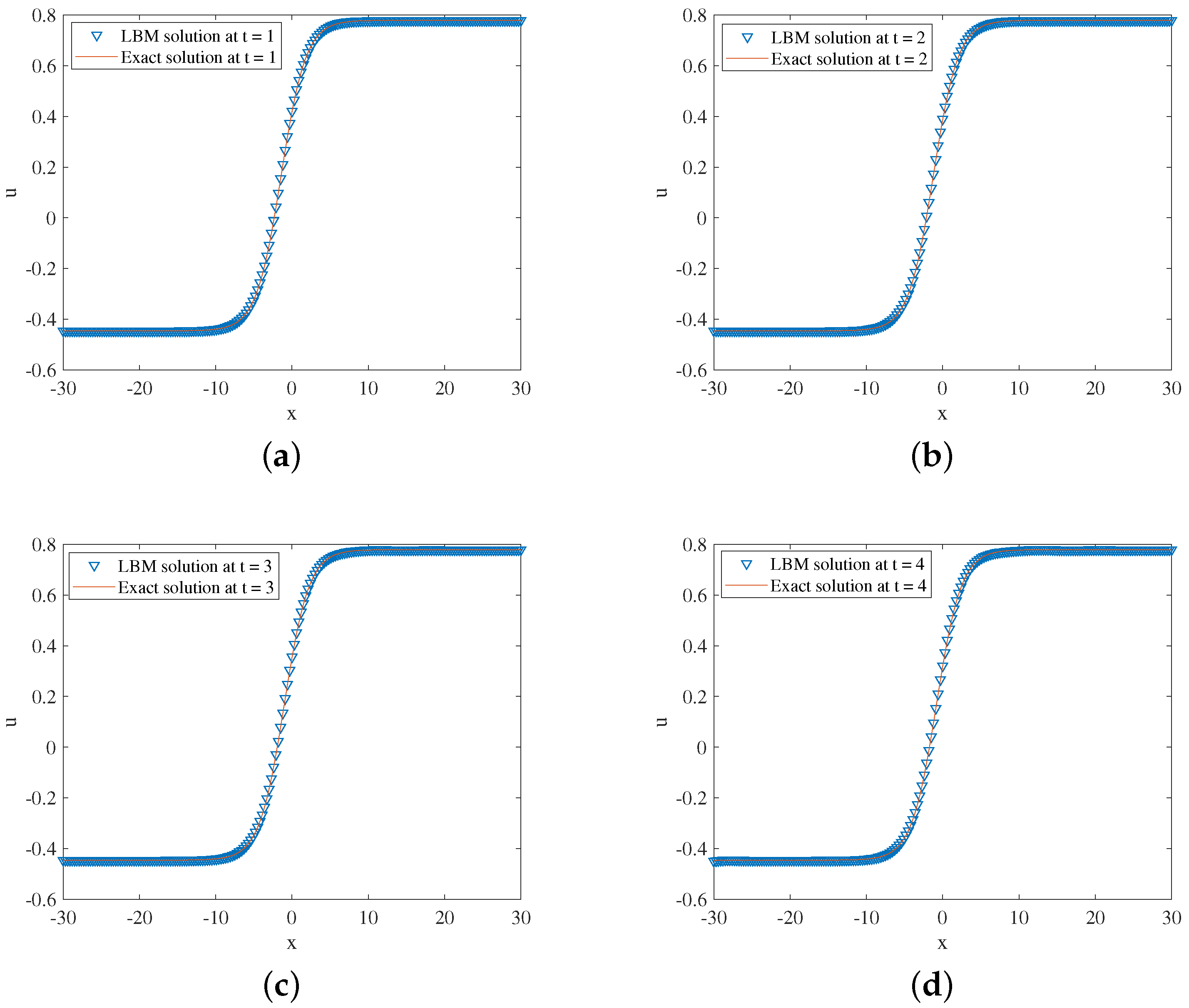
Example 2. When , and Equation (1) is called the generalized Kuramoto-Sivashinsky (GKS) equation with the following form, We obtain the exact solution
of Equation (51) by Ref. [
2]
In the simulation, we set
,
, and
. Some other parameters in Equation (
52) are
and
. The three-dimensional visual comparisons between the LBM solutions and exact solutions with time are shown in
Figure 3. We show the space-time evolution graph of the LBM solutions and exact solutions in
Figure 4. We also list the GRE of the model at different times in
Table 2. Based on
Figure 3 and
Figure 4 and
Table 2, the LBM solutions and the exact solutions are in good agreement.
Example 3. When , and Equation (1) is also a GKS equation with the different from: We obtain the exact solution
of Equation (
53) by Ref. [
3]
In the simulation, we set
,
, and
. One free parameter in Equation (
54) is
. The three-dimensional visual comparisons between the LBM solutions and exact solutions with time are shown in
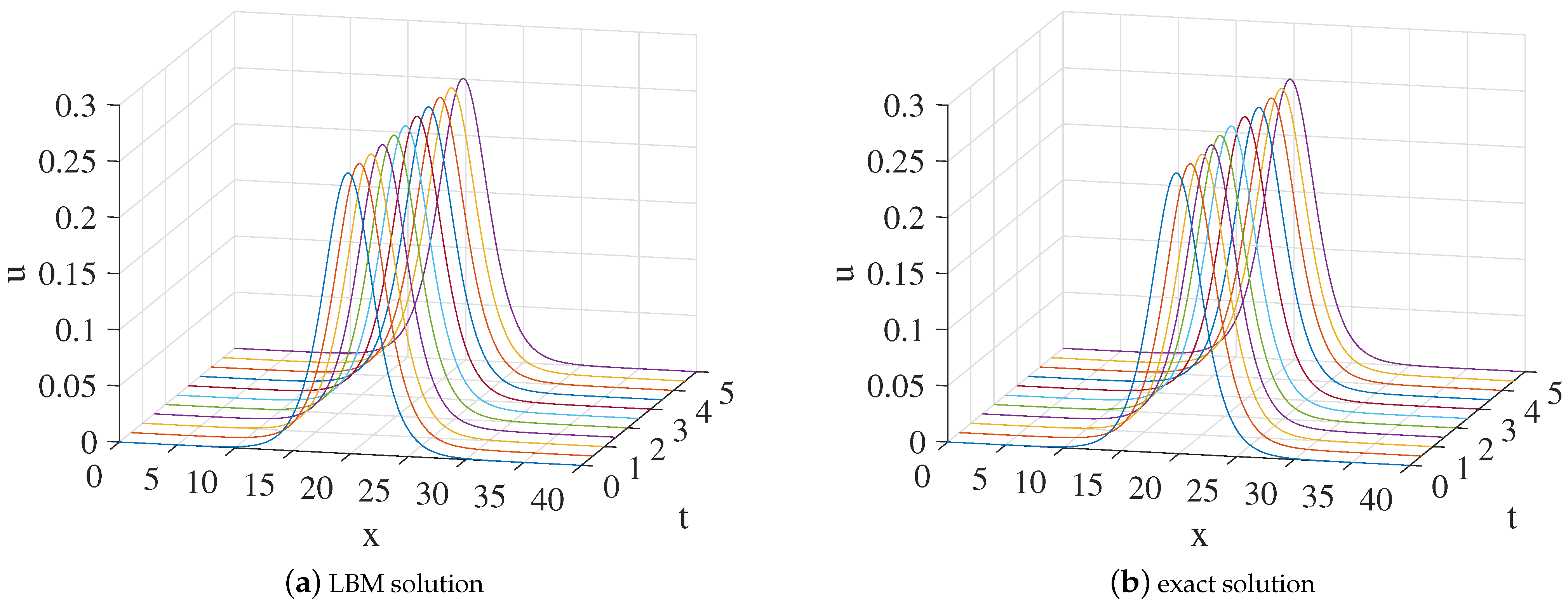
Figure 5. We show the space-time evolution graph of the LBM solutions and exact solutions in
Figure 6. We also list the GRE of the model at different times in
Table 3. Based on
Figure 5 and
Figure 6 and
Table 3, the LBM solutions and the exact solutions are in good agreement.
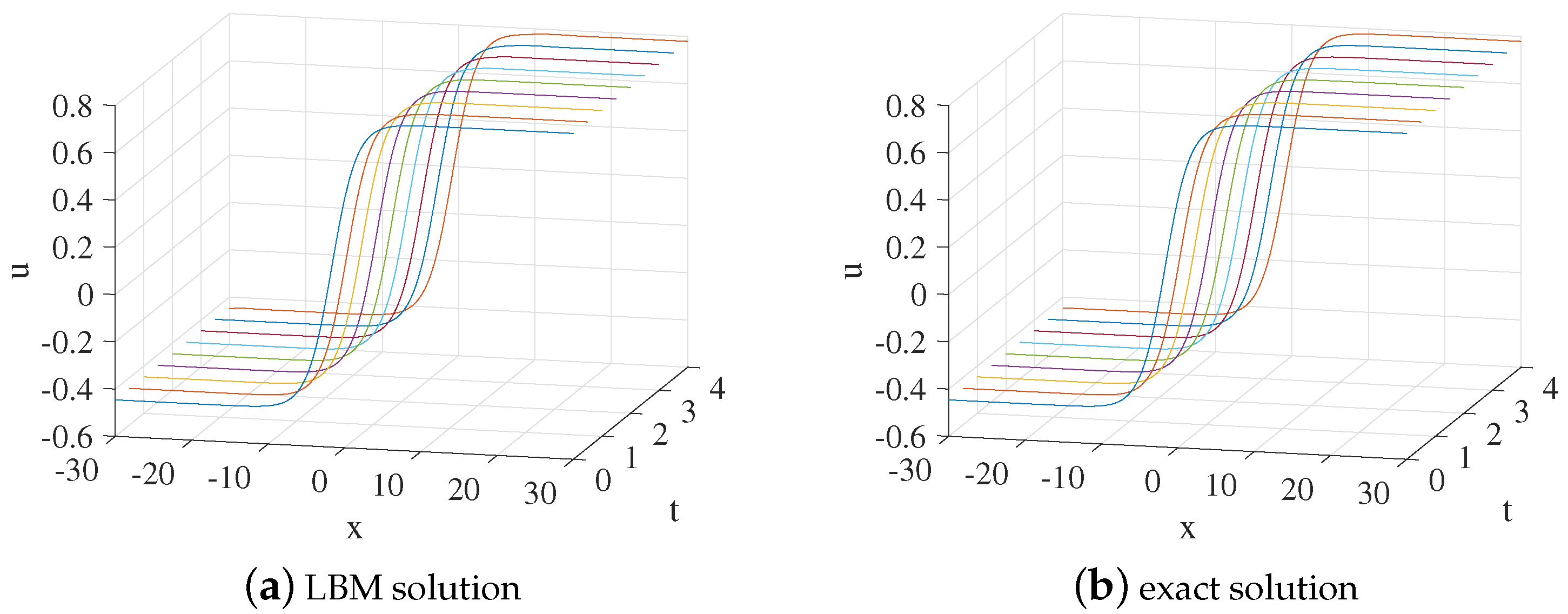
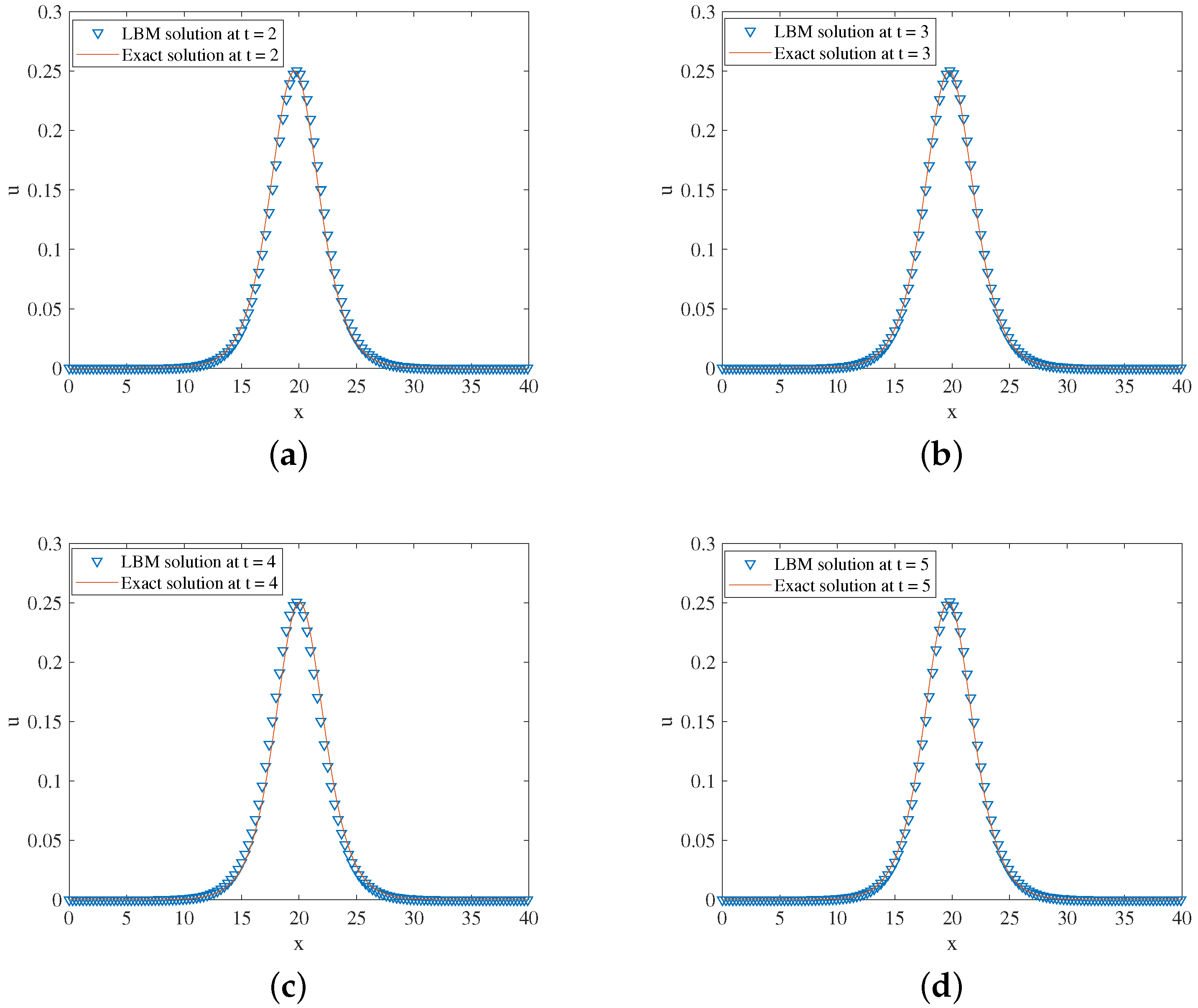
Example 4. Let , and Equation (1) becomes a variable coefficient Korteweg-de Vries (KdV) equation with the following form, The exact solution [
4]
of Equation (
55) is
In the simulation, we set
,
, and
. One free parameter
r is set at 0.5 in Equation (
56). The three-dimensional visual comparisons between the LBM solutions and exact solutions with time are shown in
Figure 7. We show the space-time evolution graph of the LBM solutions and exact solutions in
Figure 8. We also list the GRE of the model at different times in
Table 4. Based on
Figure 7 and
Figure 8 and
Table 4, the LBM solutions and the exact solutions are in good agreement.
4. Conclusions
In this paper, we developed a unified lattice Boltzmann model for the fourth order partial differential equation with time-dependent variable coefficients. In practice, as for the one-dimensional problems, we can use a unified lattice Boltzmann model to solve
nth (
) order PDEs with the specific form like Equations (
1). From the C-E analysis, the macroscopic Equation (
1) was recovered with second-order accuracy in time. Based on the proposed model and algorithm, some different types of PDEs such as in Equation (
1), including the constant-coefficient KS equation, constant-coefficient GKS equation and variable-coefficient KdV equation, were numerically solved by selecting appropriate equilibrium distribution functions
, compensation functions
, the time step
, space step
and single relaxation time
. The performance of the model was tested with a comparison between the numerical solution and the analytical solution. The numerical results show that the model is an effective method that can be used to simulate the equations such as Equatios (
1).
Finally, we would like to point out that only one-dimensional problems with time-dependent variable coefficients in the form of Equation (
1), were investigated in our model, while space-dependent variable coefficients PDEs and high-dimensional problems were not considered. We will replenish these inadequacies in the further work.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}