



Feature Correspondences Increase and Hybrid Terms Optimization Warp for Image Stitching


Abstract
:1. Introduction
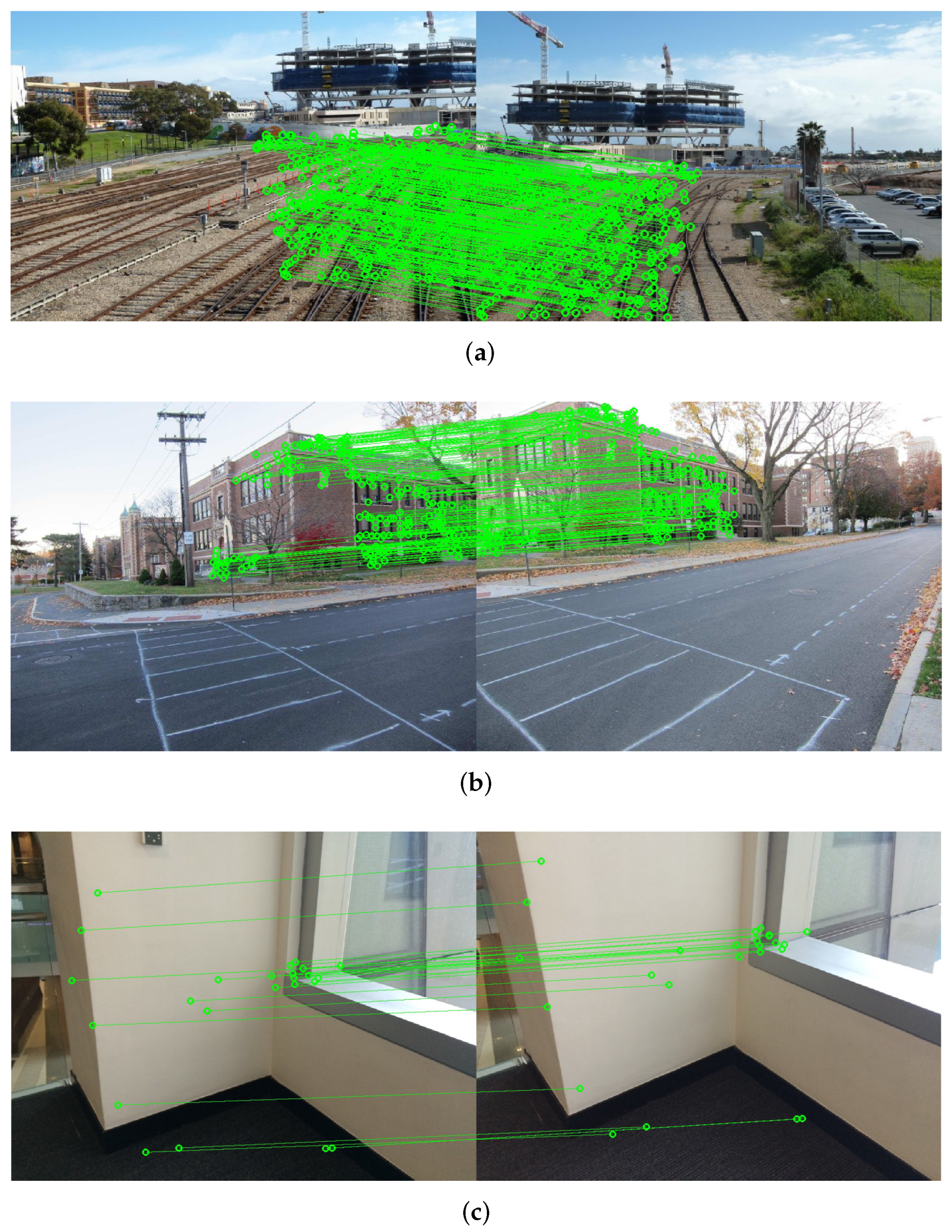
- A novel method to increase feature correspondences is proposed, which can be added to any image stitching model. It solves the problem of insufficient feature correspondence in low-textured or repetitively-textured regions, and it can effectively eliminate misalignment and artifacts.
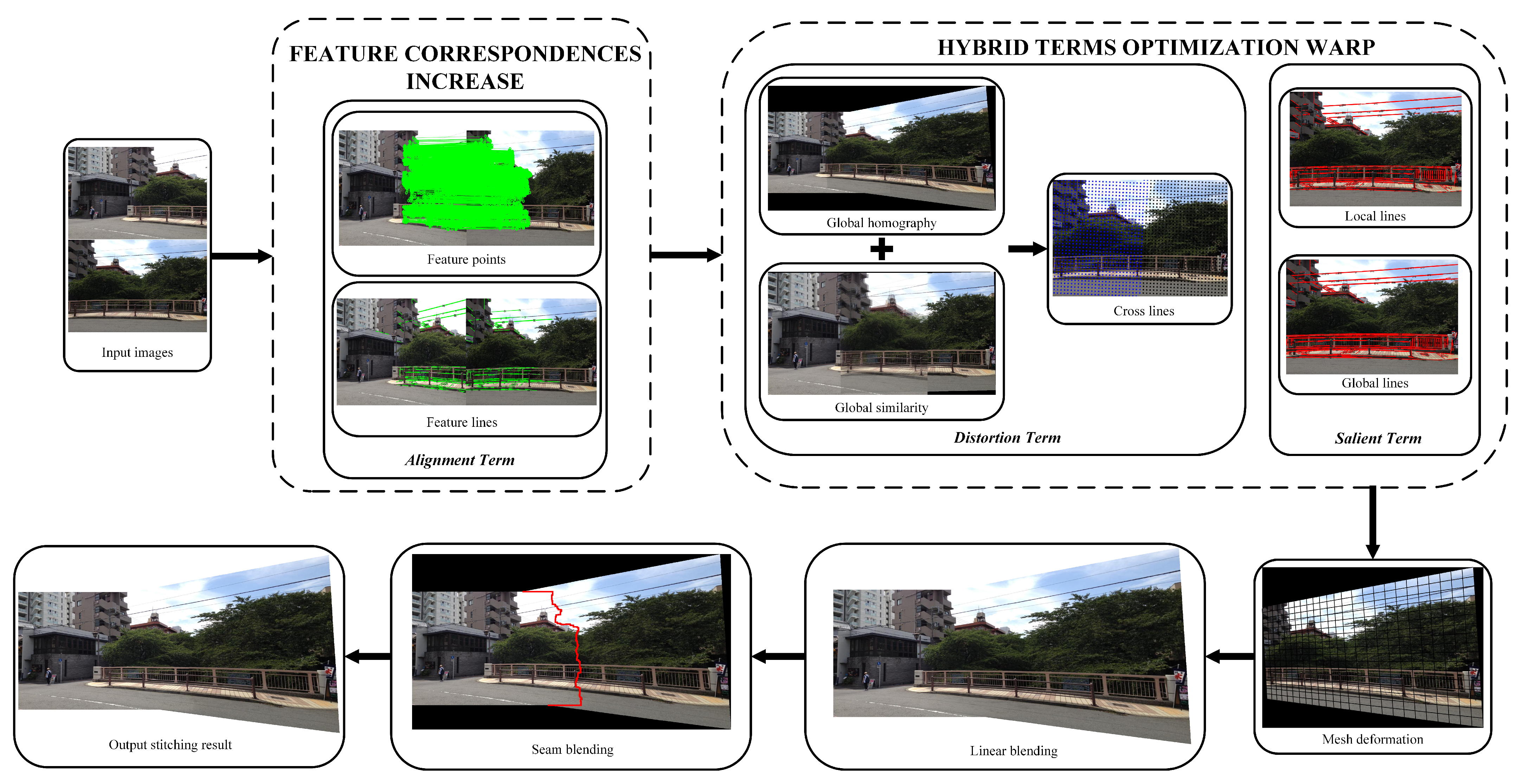
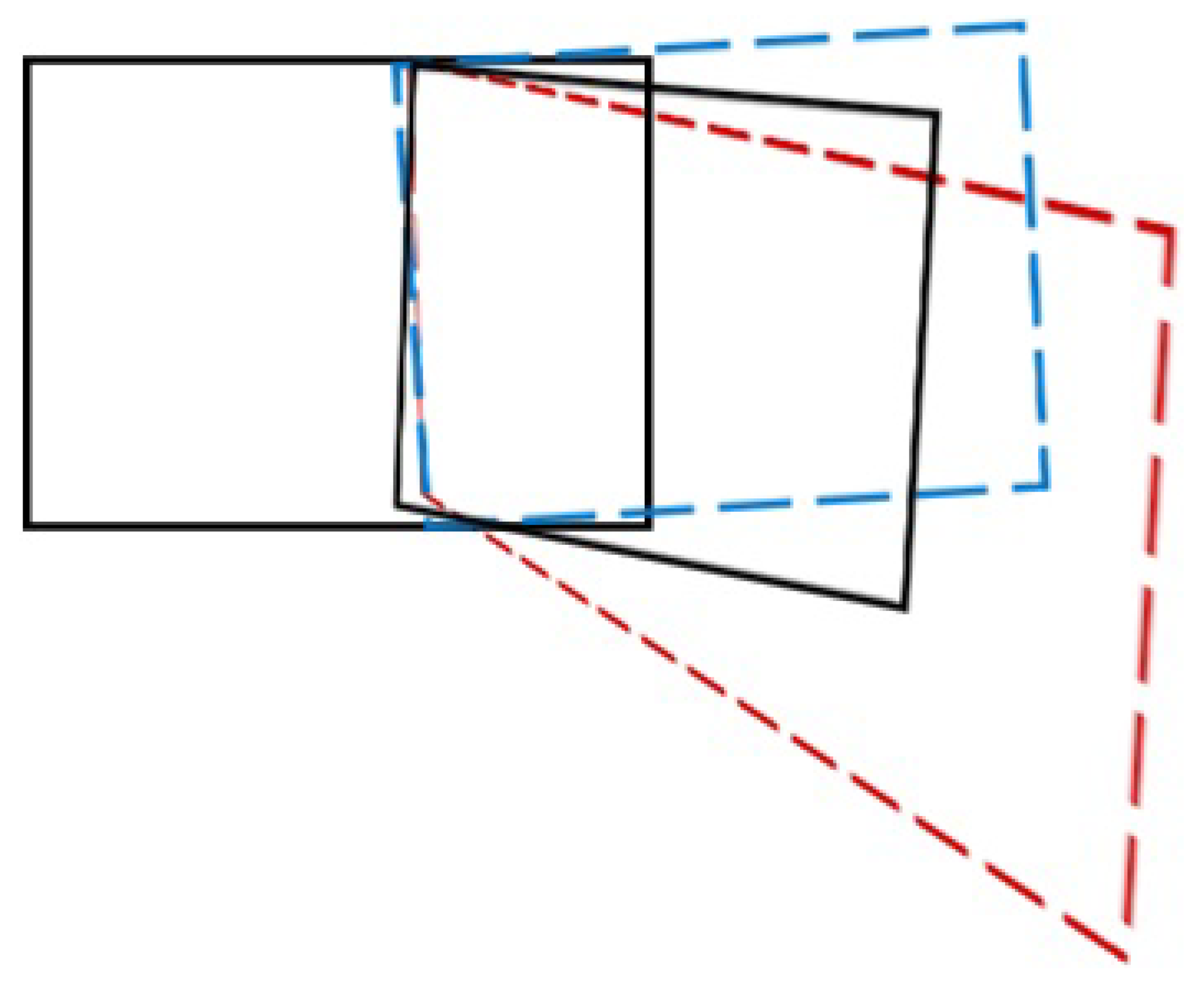
- A novel hybrid transformation combining global homography transformation and global similarity transformation is proposed to serve as the initial homography for structure preservation, which can flexibly fine-tune the structure of image stitching results compared to conventional global homography.
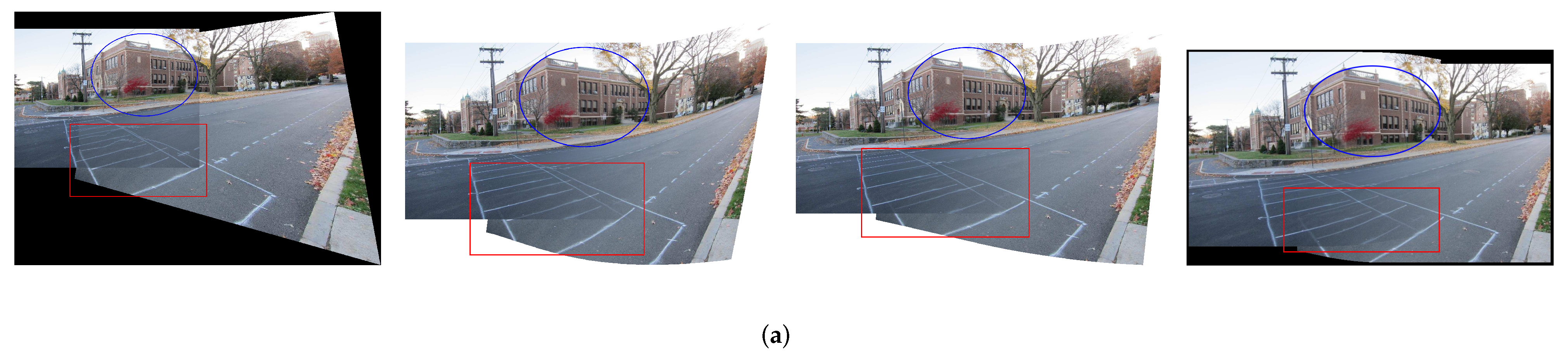
- Various optimization terms are used to locally adjust the above hybrid warping model, which can effectively mitigate projection and perspective distortion. Our flexible and robust method can effectively balance alignment and distortion, especially on images with low-textured areas in the overlapping region. For images with large parallax or significant foreground-background relationship, seam-cutting blending instead of linear blending is used to eliminate inevitable misalignment or artifacts.
2. Related Work
2.1. Feature Extraction and Matching
2.2. Spatially Varying Warping and Seam Cutting
2.3. Structure Preservation and Distortion Mitigation
3. The Proposed Method
3.1. Feature Correspondences Increase
3.2. Hybrid Terms Optimization Warp
3.2.1. Mathematical Preparation
3.2.2. Alignment Term
3.2.3. Distortion Term
3.2.4. Salient Term
3.2.5. Total Energy Function
| Algorithm 1 Stitching two images. |
| Input: a target image and a reference image . Output: a stitched image.
|
4. Experiments
4.1. Experimental Setup
4.2. Quantitative Evaluation
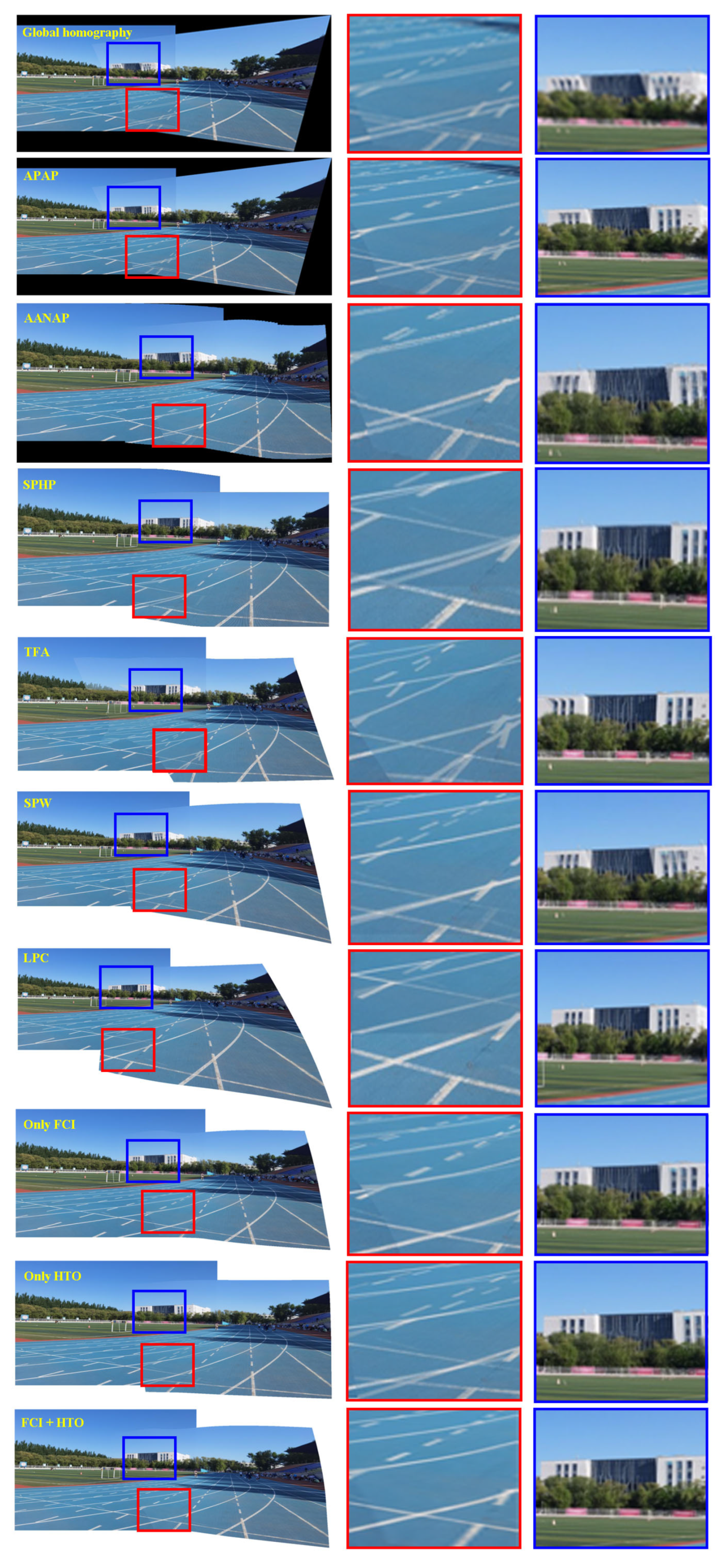
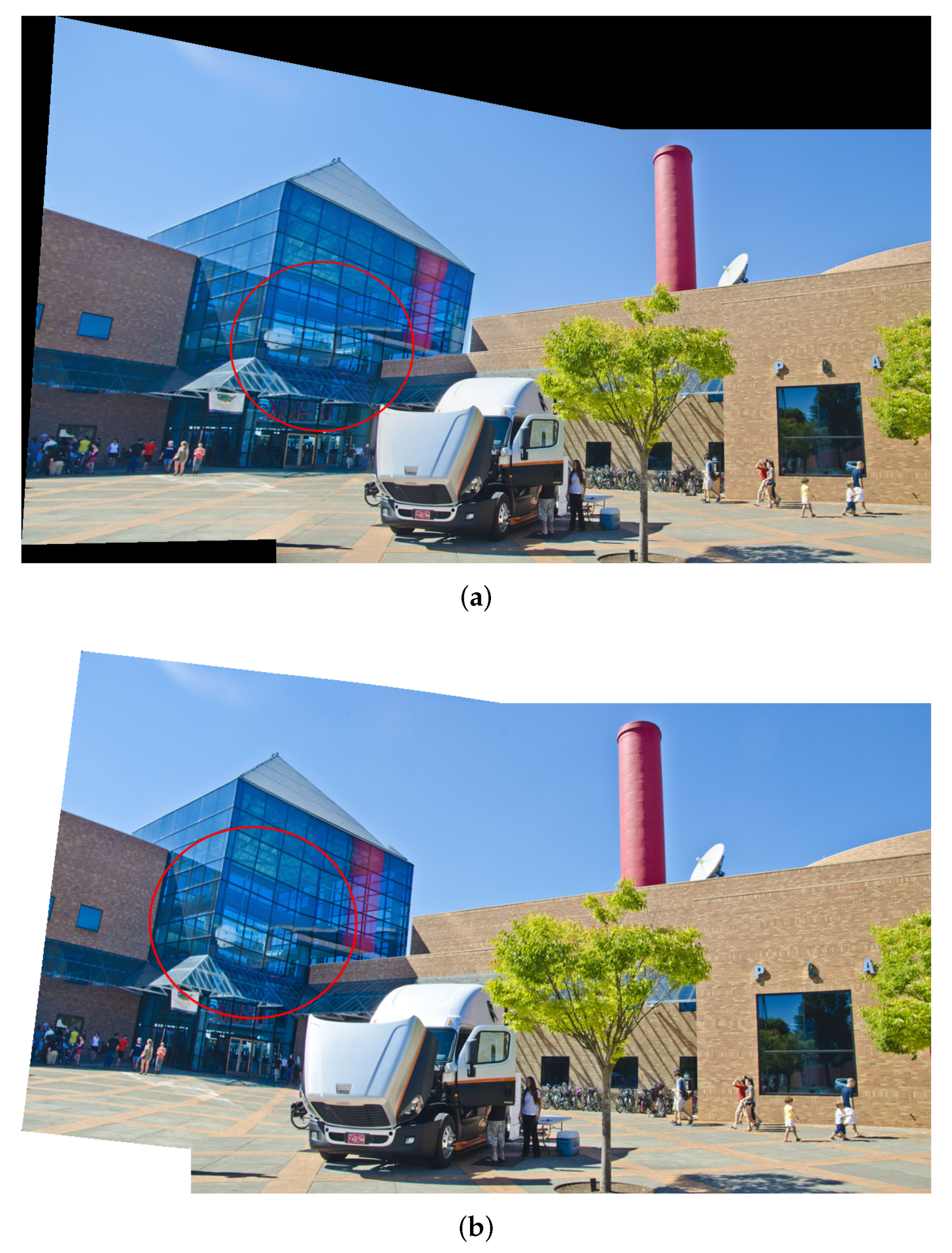
4.3. Qualitative Comparison
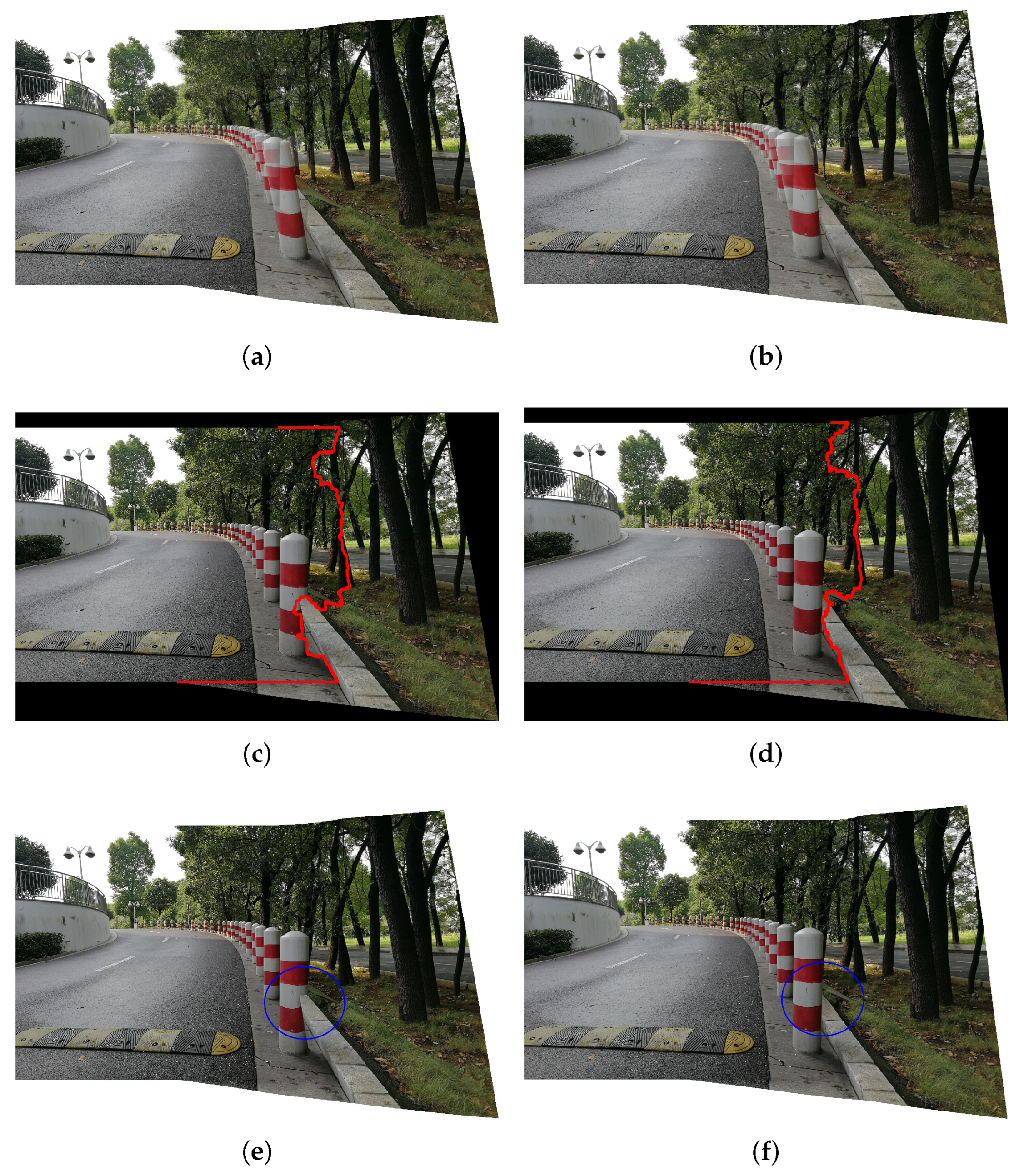
4.4. Seam-Cutting Blending
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Szeliski, R. Image Alignment and Stitching: A Tutorial. Found. Trends Comput. Graph. Vis. 2007, 2, 1–104. [Google Scholar] [CrossRef]
- Brown, M.A.; Lowe, D.G. Automatic Panoramic Image Stitching using Invariant Features. Int. J. Comput. Vis. 2006, 74, 59–73. [Google Scholar] [CrossRef] [Green Version]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuScenes: A Multimodal Dataset for Autonomous Driving. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11618–11628. [Google Scholar]
- Luan, Y.; Han, C.; Wang, B. An Unsupervised Video Stabilization Algorithm Based on Key Point Detection. Entropy 2022, 24, 1326. [Google Scholar] [CrossRef]
- Madhusudana, P.C.; Soundararajan, R. Subjective and Objective Quality Assessment of Stitched Images for Virtual Reality. IEEE Trans. Image Process. 2019, 28, 5620–5635. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.H.; Chen, C.J.; Chuang, Y.Y. Spatially-Varying Image Warps for Scene Alignment. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 64–69. [Google Scholar]
- Lin, W.Y.; Liu, S.; Matsushita, Y.; Ng, T.T.; Cheong, L.F. Smoothly varying affine stitching. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 345–352. [Google Scholar]
- Zaragoza, J.; Chin, T.J.; Tran, Q.H.; Brown, M.S.; Suter, D. As-Projective-As-Possible Image Stitching with Moving DLT. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2339–2346. [Google Scholar]
- Gao, J.; Li, Y.; Chin, T.J.; Brown, M.S. Seam-Driven Image Stitching. In Proceedings of the Eurographics 2013—Short Papers; Otaduy, M.A., Sorkine, O., Eds.; The Eurographics Association: Vienna, Austria, 2013. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, F. Parallax-Tolerant Image Stitching. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3262–3269. [Google Scholar]
- Lin, K.; Jiang, N.; Cheong, L.F.; Do, M.N.; Lu, J. SEAGULL: Seam-Guided Local Alignment for Parallax-Tolerant Image Stitching. In Proceedings of the ECCV, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Nie, L.; Lin, C.; Liao, K.; Liu, S.; Zhao, Y. Unsupervised Deep Image Stitching: Reconstructing Stitched Features to Images. IEEE Trans. Image Process. 2021, 30, 6184–6197. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Huang, H. Image Stitching with Manifold Optimization. IEEE Trans. Multimed. 2022. [Google Scholar] [CrossRef]
- Nie, L.; Lin, C.; Liao, K.; Liu, S.; Zhao, Y. Depth-Aware Multi-Grid Deep Homography Estimation With Contextual Correlation. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 4460–4472. [Google Scholar] [CrossRef]
- LoweDavid, G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Lin, C.C.; Pankanti, S.; Ramamurthy, K.N.; Aravkin, A.Y. Adaptive as-natural-as-possible image stitching. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1155–1163. [Google Scholar]
- Li, S.; Yuan, L.; Sun, J.; Quan, L. Dual-Feature Warping-Based Motion Model Estimation. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4283–4291. [Google Scholar]
- Li, J.; Wang, Z.; Lai, S.; Zhai, Y.; Zhang, M. Parallax-Tolerant Image Stitching Based on Robust Elastic Warping. IEEE Trans. Multimed. 2018, 20, 1672–1687. [Google Scholar] [CrossRef]
- Jia, Q.; Li, Z.; Fan, X.; Zhao, H.; Teng, S.; Ye, X.; Latecki, L.J. Leveraging Line-point Consistence to Preserve Structures for Wide Parallax Image Stitching. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 12181–12190. [Google Scholar]
- Jia, Q.; Gao, X.; Fan, X.; Luo, Z.; Li, H.; Chen, Z. Novel Coplanar Line-Points Invariants for Robust Line Matching Across Views. In Proceedings of the ECCV, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Liao, T.; Li, N. Single-Perspective Warps in Natural Image Stitching. IEEE Trans. Image Process. 2020, 29, 724–735. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Joo, K.; Kim, N.; Oh, T.H.; Kweon, I.S. Line meets as-projective-as-possible image stitching with moving DLT. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2015; pp. 1175–1179. [Google Scholar]
- von Gioi, R.G.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A Line Segment Detector. Image Process. Line 2012, 2, 35–55. [Google Scholar] [CrossRef] [Green Version]
- Bian, J.; Lin, W.Y.; Matsushita, Y.; Yeung, S.K.; Nguyen, T.D.; Cheng, M.M. GMS: Grid-Based Motion Statistics for Fast, Ultra-Robust Feature Correspondence. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 June 2017; pp. 2828–2837. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G.R. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Tokyo, Japan, 25–27 May 2011; pp. 2564–2571. [Google Scholar]
- Harris, C.G.; Stephens, M.J. A Combined Corner and Edge Detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988. [Google Scholar]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. In Proceedings of the ECCV, Graz, Austria, 7–13 May 2006. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Gool, L.V. SURF: Speeded Up Robust Features. In Proceedings of the ECCV, Graz, Austria, 7–13 May 2006. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P.V. BRIEF: Binary Robust Independent Elementary Features. In Proceedings of the ECCV, Crete, Greece, 5–11 September 2010. [Google Scholar]
- Lin, W.Y.; Cheng, M.M.; Lu, J.; Yang, H.; Do, M.N.; Torr, P.H.S. Bilateral Functions for Global Motion Modeling. In Proceedings of the ECCV, Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Li, J.; Deng, B.; Tang, R.; Wang, Z.; Yan, Y. Local-Adaptive Image Alignment Based on Triangular Facet Approximation. IEEE Trans. Image Process. 2020, 29, 2356–2369. [Google Scholar] [CrossRef] [PubMed]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In Proceedings of the Workshop on Vision Algorithms, Corfu, Greece, 21–22 September 1999. [Google Scholar]
- Gao, J.; Kim, S.J.; Brown, M.S. Constructing image panoramas using dual-homography warping. In Proceedings of the CVPR, Colorado Springs, CO, USA, 20–25 June 2011; pp. 49–56. [Google Scholar]
- Chang, C.H.; Sato, Y.; Chuang, Y.Y. Shape-Preserving Half-Projective Warps for Image Stitching. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3254–3261. [Google Scholar]
- Liu, F.; Gleicher, M.; Jin, H.; Agarwala, A. Content-preserving warps for 3D video stabilization. ACM Trans. Graph. 2009, 28, 44. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Liao, T.; Wang, C. Perception-based seam cutting for image stitching. Signal Image Video Process. 2018, 12, 967–974. [Google Scholar] [CrossRef]
- Xue, W.; Xie, W.; Zhang, Y.; Chen, S. Stable Linear Structures and Seam Measurements for Parallax Image Stitching. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 253–261. [Google Scholar] [CrossRef]
- Chen, Y.S.; Chuang, Y.Y. Natural Image Stitching with the Global Similarity Prior. In Proceedings of the ECCV, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Li, N.; Xu, Y.; Wang, C. Quasi-Homography Warps in Image Stitching. IEEE Trans. Multimed. 2018, 20, 1365–1375. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Lai, Y.K.; Zhang, F.L. Content-Preserving Image Stitching With Piecewise Rectangular Boundary Constraints. IEEE Trans. Vis. Comput. Graph. 2021, 27, 3198–3212. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Yuan, L.; Tan, P.; Sun, J. Bundled camera paths for video stabilization. ACM Trans. Graph. (TOG) 2013, 32, 1–10. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Databases | SIFT+RANSAC | Global Homography | APAP | SPW | LPC | OURS | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Matches | RMSE | SSIM | RMSE | SSIM | RMSE | SSIM | RMSE | SSIM | Matches | SSIM | RMSE | |
| fence [17] | 597 | 0.6489 | 1.7674 | 0.7011 | 1.7773 | 0.6952 | 1.4592 | 0.6807 | 1.3368 | 5911 | 0.7184 | 1.5014 |
| Potberry [20] | 360 | 0.3971 | 2.3419 | 0.5904 | 2.3419 | 0.4648 | 2.0559 | 0.5144 | 1.8928 | 3772 | 0.6142 | 1.7384 |
| railtracks [8] | 651 | 0.4474 | 2.5763 | 0.6354 | 2.5767 | 0.6361 | 2.217 | 0.5871 | 1.5155 | 6176 | 0.6738 | 1.6670 |
| DHW-temple [34] | 322 | 0.5517 | 2.6633 | 0.6799 | 2.6437 | 0.6057 | 2.2674 | 0.4999 | 2.3199 | 5474 | 0.6935 | 1.6570 |
| MemorialHall [39] | 64 | 0.5370 | 2.5169 | 0.5590 | 2.5169 | 0.5018 | 2.2710 | 0.5217 | 1.7471 | 1603 | 0.5417 | 1.8711 |
| 017 [10] | 330 | 0.5871 | 3.0506 | 0.6151 | 3.3019 | 0.6254 | 2.3501 | 0.6139 | 2.6153 | 5064 | 0.6273 | 2.4313 |
| cup [20] | 159 | 0.4747 | 2.6436 | 0.5509 | 2.1149 | 0.4778 | 2.4807 | 0.4778 | 2.6069 | 3041 | 0.5730 | 2.0057 |
| office [20] | 181 | 0.5415 | 3.5423 | 0.6582 | 3.5423 | 0.6150 | 3.0166 | 0.6124 | 2.8839 | 2991 | 0.6904 | 1.9996 |
| intersection [17] | 426 | 0.3612 | 3.4626 | 0.4809 | 3.5073 | 0.4152 | 2.5591 | 0.4285 | 2.8868 | 4314 | 0.5520 | 1.9684 |
| tower [19] | 652 | 0.5734 | 3.2967 | 0.7601 | 3.2989 | 0.7702 | 2.2089 | 0.8259 | 1.6391 | 6409 | 0.8501 | 1.6145 |
| runway | 208 | 0.5180 | 3.0860 | 0.5892 | 3.0865 | 0.5510 | 2.7476 | 0.5584 | 2.0154 | 3846 | 0.6632 | 1.4540 |
| car park | 293 | 0.4044 | 2.6544 | 0.4573 | 2.6544 | 0.4313 | 2.4622 | 0.2328 | 3.7501 | 3565 | 0.4978 | 2.3074 |
| football field | 237 | 0.4881 | 3.1110 | 0.5828 | 3.1110 | 0.4872 | 2.5211 | 0.4251 | 1.9414 | 3641 | 0.5879 | 1.6641 |
| sidewalk | 245 | 0.7261 | 2.3933 | 0.7681 | 2.3933 | 0.7270 | 1.9704 | 0.4740 | 2.9211 | 3130 | 0.7953 | 1.9711 |
| jump runway | 117 | 0.7299 | 1.8474 | 0.7457 | 1.8470 | 0.7535 | 1.6250 | 0.6628 | 1.9676 | 2347 | 0.7499 | 1.7163 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cong, Y.; Wang, Y.; Hou, W.; Pang, W. Feature Correspondences Increase and Hybrid Terms Optimization Warp for Image Stitching. Entropy 2023, 25, 106. https://doi.org/10.3390/e25010106
Cong Y, Wang Y, Hou W, Pang W. Feature Correspondences Increase and Hybrid Terms Optimization Warp for Image Stitching. Entropy. 2023; 25(1):106. https://doi.org/10.3390/e25010106
Chicago/Turabian StyleCong, Yizhi, Yan Wang, Wenju Hou, and Wei Pang. 2023. "Feature Correspondences Increase and Hybrid Terms Optimization Warp for Image Stitching" Entropy 25, no. 1: 106. https://doi.org/10.3390/e25010106
APA StyleCong, Y., Wang, Y., Hou, W., & Pang, W. (2023). Feature Correspondences Increase and Hybrid Terms Optimization Warp for Image Stitching. Entropy, 25(1), 106. https://doi.org/10.3390/e25010106