1. Introduction
When a helicopter takes off and lands or hovers at a low altitude in the desert, snow, grassland, sea, or other harsh field conditions, the collisions of large sand particles with the high-speed rotating compressor blades may cause the blades to crack or even break. Sand particles can cause great damage to the working efficiency and service life of the engine. Smaller-sized particles can enter the engine flow channel because they are difficult to separate. These smaller-sized particles will pass through the combustion chamber with the airflow after being heated and melted, thereby blocking the cooling passage of the turbine, which causes changes in the cooling characteristics of the turbine blade. Therefore, the effectiveness of air intake protection is closely related to flight safety.
The particles taken in by helicopters are mainly sand dust and are primarily composed of SiO2. In nature, sand particles have a wide size range from 1 μm to 1 mm. Various forms of helicopter air intake protection devices have been proposed to protect helicopter engines and increase their service lives, such as inlet barrier filters (IBF), vortex tube separator (VTS), and integer particle separators (IPS). In 1969, the JFTD-12-4A turboshaft engine in the CH-54 helicopter was replaced due to sand abrasion after flying in Southeast Asia for less than 60 h. The average replacement life of the type of engine was only about 80 h. After a particle separation device was installed, its lifespan increased to 800 h, a tenfold increase. Among the particle separators, IPS has become the most popular and widely used air intake protection scheme due to its simple structure, small total pressure loss, and low maintenance cost. It is composed of vortex blades, reverse vortex blades, inner rings, blowers, sweeping volute, etc. The fixed vortex blades cause the air to rotate. The rotating air uses the centrifugal force of inertia to separate and force sand, gravel, dust, and other foreign objects into the outer channel of the inner ring, where they are blown out of the engine by the blower, and clean air is drawn into the engine through the inner ring.
With respect to structural optimization of the particle separator, much research has been carried out using finite volume methods, where structure optimization calculations are used to improve the separation efficiency and reduce the total pressure loss of the particle separator. Breitman [
1] studied the shape of the splitter and found that the shape of the splitter has a greater impact on the performance of the IPS. When designing the splitter, local flow conditions should be considered when selecting the appropriate shape and size of the splitter. Mann [
2] proposed a new particle separator configuration and analyzed the two contradictions in the particle separator design. The scavenge region requires a larger channel area to capture more pollutants, but at the same time, it also needs a smaller channel area to reduce the volume of air passing through. The core region needs a larger channel area to have more air volume, and it also needs a smaller channel area to reduce the entry of pollutants. Kuang [
3] compared the different positions of the bulge and the position of the splitter tip and found that the overall structure of the particle separator must be considered comprehensive. If only the optimization and configuration of a single position are considered, it is difficult to meet these requirements. Taslim [
4] modified the inlet of the existing particle separator, explored the influence of the engine inlet angle on the separation efficiency and total pressure, and studied the influence of the size, distribution, particle density, and particle shape of the engine inlet on the removal efficiency.
Many studies have been performed with respect to the most important factors affecting the separation efficiency of the particle separator. Jiang [
5] analyzed the efficiency of the particle separator under different conditions and revealed the separation mechanism of the particle separator by Fluent. They also researched the effects of particle size, shape factor, resilience characteristics, gravity, particle inlet velocity, inlet mass distribution, and engine operating conditions on the removal efficiency. Barone [
6,
7,
8,
9,
10] used the Stokes number to express the ratio of particle inertial action to diffusion action, designed and built a device to study the complicated flow of the inertial particle separator, and observed the particle separator using a two-dimensional flow phenomenon. There was an obvious secondary circulation in the scavenge flow path, and the separation efficiency of A4 coarse dust in three designed particle separators was measured by particle image velocimetry (PIV) technology. The separation efficiency of the three particle separators was compared using sand particles with diameters of 10 μm, 35 μm, and 120 μm, and the test results were consistent with the expected range. Large-size particles are greatly affected by inertia, and the separation efficiency of the three particle separators for 120 μm particles is close to 100%. The separation efficiency of the scavenging ratio (SCR) for small particles is important. The Stokes number is a dimensionless constant used to express the ratio of particle inertia to diffusion. A mathematical model to predict separation efficiency is proposed through the Stokes number. In another way, scholars have carried out considerable research on the wall surface of the particle separator. Yuan [
11] analyzed the particle trajectories and improved the separation efficiency by modifying the wall material. Li [
12] used a combination of experimental and theoretical analysis to study the mechanism of particle rebound by processing an image obtained with a high-speed camera, where the sand rebound coefficient of different materials was established. Through many experiments, Wakeman [
13] obtained the collision rebound characteristic formula of sand particles on the surface of a 2024 aluminum alloy. The 2024 aluminum alloy is widely used in the aviation field, and the application of a collision rebound characteristic formula is widely used. Ling [
14] arranges a flexible cord/rubber composite material in the central body of a particle separator to change the geometric shape of the device. Snyder [
15] has also established a new particle separator configuration and proposed a combined particle separator scheme that divides the airflow into two parts, connects them in parallel, and finally separates them through two upper and lower parallel particle separators.
At present, the particle separator is only useful for particles larger than 10 μm in size, and the separation efficiency of particles smaller than 10 μm in size is still determined by aerodynamic performance, so overall separation efficiency cannot be completely improved. This paper performs numerical calculations on the classic configuration of the integrated particle separator from the scientific and technological reports found in the literature [
16,
17,
18,
19,
20], and the calculation results are also compared and analyzed with the data from the paper. Through reverse analysis of the particle trajectory, the material of the front wall of the shroud is modified to improve performance. A tandem particle separator structure was designed to improve the overall separation efficiency of the particle separator. The second part of this paper introduces the research object, the third part introduces the computational model and the computational method, the fourth part provides an experimental comparison and validation of the algorithm, and the fifth part proposes two particle separator optimization methods.
2. Research Objectives
The world’s first set of IPS was applied to the T700 engine of the “Black Hawk” helicopter, and then the T700 engine equipped with IPS was used in the “Apache” helicopter. The main components of IPS include the center body, outer cover, splitter, scavenging volute, and collection tube, and the structure is rather unique. Under the action of inertia and air, sand particles bounce back to the scavenge flow path through the center body and shroud. Then, the clean air enters the compressor.
Figure 1a shows a CH-47 helicopter with the IPS system installed on the engine inlets.
Figure 1b illustrates the T700 particle separator. The pre-rotating blades rotate the airflow-containing particles. The particles hit the shroud at a certain angle through the pre-rotating blades, and the particle separator uses inertia to separate the particles.
The particle separator mounted on the engine is an axisymmetric bifurcated tube structure, and a typical T700 engine inlet IPS cross-section schematic is shown in
Figure 1c. The fluid area includes an air inlet channel, a scavenge flow path, and a core flow path. The solid structure consists of a shroud, hub, and splitter. There is a bulge in the central body, and its profile is sharply curved along the flow direction. The airflow containing sand undergoes a large angle of deflection under the guidance of the central body bulge, resulting in a large centrifugal force for the airflow containing sand. Due to the large inertia of the sand particles, they are forced to move closer to the outside of the channel and enter the air sweeping channel, while most of the airflow enters the compressor through the main flow channel.
Considering that the particle separator channel is three-dimensional, its circumferential shape is the same, so the simulation calculation simplifies the 3D model into a 2D model for the calculation to conserve calculation resources. The main focus of the calculation results is on the separation efficiency of sand particles and the total pressure recovery coefficient. The research object is an inertial particle separator similar to the one used in the T700 engine. The basic structural sketch of the model is shown in
Figure 1d. The basic data and design solutions of the model were obtained from the scientific and technical reports in the references [
17].
4. Verification of Calculation Examples
4.1. Mesh Generation
We used Pointwise meshing software to mesh the established reference physical model. The entire computing area uses a structured grid for meshing. Since the simulation uses the k-ε model for calculation, the grid is encrypted near the wall surface to ensure that the boundary y+ is above 30.
In this work, the mesh-independence of the particle separator was verified, as shown in
Figure 3. The left side of
Figure 3 shows the particle separator mesh scales of 30,000, 70,000, 100,000, and 150,000, and the right side of
Figure 3 shows the calculation results of different scales of the mesh using Fluent’s DPM model for AC-Coarse and C-Spec. From the calculation results, it can be seen that the error in the separation efficiency of the two particles after increasing the mesh scale separation does not exceed 2.5%. In this paper, the particle separator simulation mesh scale is determined to be 30,000.
4.2. Boundary Conditions
To verify the correctness of the simulation methods used in this article, the simulation was carried out based on the actual experimental conditions with a mass flow rate of 2.28 kg/s and an SCR of 18%. Suppose the flow field is a stable isothermal symmetric flow field, and set the calculation residual to 1 × 10−5 and the calculation step size to 1500. The medium is a gas–solid two-phase flow, the air density is 1.225 kg/m3, and the viscosity is 1.7894 × 10−5 Pa·s. The sand is selected from quartz sand particles, and the density is 2650 kg/m3. They are spherical particles that are not deformed or do not collide with each other. Two common simulation boundary conditions are used to analyze the flow field of the particle separator, and the simulation and experimental results are compared in these two cases.
The boundary conditions of the fluid domain are shown in
Table 2.
Simulation 1 inlet boundary using total pressure inlet, the scavenge flow path and the core flow path are mass flow outlets, and the mass flow ratio between the scavenge flow path and the core flow path is 0.18.
Simulation 2 inlet boundary using speed inlet, the scavenge flow path is set to a pressure outlet size of P0, the core flow path is also a pressure outlet, and the pressure magnitude is set to 0.82 × P0.
The discrete phase boundary conditions are as follows:
The sand velocity is set to 80% of the air velocity. The inlet section velocity of boundary condition 1 is 87.14 m/s after surface average integration. The sand inlet velocity is set at 69.6 m/s. The grit inlet angle is set to 36 degrees because the T700 particle separator has pre-rotating blades, which use inertia to separate particles after they hit the shroud. Vx = 55.68 m/s and Vy = 41.94 m/s.
The velocity inlet is set to 84.5 m/s, and the sand velocity is set to 80% of the air velocity at an inlet angle of 36 degrees. The sand velocity is set to 67.6 m/s. Vx = 54.04 m/s, and Vy = 40.56 m/s.
4.3. Flow Field Analysis
Figure 4 shows the particle trajectory and residence time for the AC-Coarse and C-Spec separation processes using the two boundary conditions. There is not a significant difference in the separation effects of the two boundary conditions through the trajectory diagrams, but it can be seen from the running time of the two particles that AC-Coarse stays in the IPS for a longer time, with the longest time being 0.0041 s, while C-Spec stays in the IPS for a shorter time, with the longest time being 0.00183 s. It can be seen that the trajectory of AC-Coarse looks more chaotic, while the trajectory of C-Spec looks more regular. The trajectory of AC-Coarse has curves while the trajectory of C-Spec is straight. It can be seen that when the AC-Coarse is separated, there is a vortex at the upper end of the scavenge flow path, resulting in secondary separation, and since the average quality of AC-Coarse is lower than that of C-Spec, it is highly affected by the force of the airflow. At the air vortex, some AC-Coarse is re-exported to the separate flow path, and part of the AC-Coarse is sucked into the core flow path. Therefore, the cleaning time is longer. Compared with AC-Coarse, C-Spec is more strongly reflected by the wall and less affected by airflow. It repeatedly collides with the wall into the scavenge flow path, and the rebound force of the wall is more obvious. Therefore, the cleaning time is shorter, and it has a better cleaning effect on C-Spec.
Figure 5 and
Figure 6 show the static pressure diagram and wall static pressure curve diagram under the two boundary conditions, respectively. By comparing the experimental data with the simulation data in the literature, the static pressure distribution is shown in
Figure 5. The hydrostatic pressure distribution of Simulation 1 has a high similarity to the hydrostatic pressure distribution in the literature, and the hydrostatic pressure distribution of Simulation 2 has relatively low similarity to the hydrostatic pressure distribution in the literature.
Figure 6 shows the wall static pressure curve. It can also be seen that at the center body, the static pressure value of Simulation 1 is around 90,000 Pa, the static pressure value of Simulation 2 is around 85,000 Pa, and at the entrance of the inlet path, the maximum static pressure at the boundary of Simulation 2 has exceeded 110,000 Pa, and the error is relatively large. The static pressure distribution for the shroud and the center body of Simulation 1 has a smaller error compared with the experimental value [
17]. Therefore, the calculation results of the shroud and hub for Simulation 1 are closer to the experimental result compared to Simulation 2. It can be judged that boundary condition 1 is more accurate for the simulation of static pressure and more suitable for the simulation research of particle separators.
Figure 7 shows the Mach number cloud map and a velocity vector diagram of the two boundary conditions. From the Mach number cloud map, it can be seen that the maximum Mach number of boundary condition 2 at the center body bulge reached 0.63, and then it can be seen that the maximum Mach number of boundary condition 1 at the bulge of the central body reaches a maximum Mach number of 0.44, which is also the reason for the higher static pressure at the center body of boundary condition 1. It can be seen from the velocity vector diagram that in the upper part of the scavenge flow path, the velocity is close to 0, and there is a vortex that produces a secondary separation effect. Both boundary conditions will produce vortex airflow, and the vortex airflow will cause the particle separation time to be longer. In addition, some of the small particles will be sucked into the core flow path. The gas velocity began to increase at the bulge of the central body, and the highest Mach number of the two boundary conditions reached 0.63 at the cross-section of the core flow path, but the distribution of boundary condition 1 was more uniform. The calculation results for boundary condition 1 are closer to the literature.
Boundary condition 1: The total outlet pressure at the core flow path is 105,550.9 Pa after mass-weighted average integration.
Boundary condition 2: Inlet mass flow calculation result is 2.33 kg/s, scavenge path outlet mass flow is 0.47 kg/s, core path outlet mass flow is 1.85 kg/s, and the SCR was calculated to be 25.4%. The total inlet pressure is 107,170 Pa and the total outlet pressure of the core mass path is 106,340 Pa after mass-weighted average integration.
The calculation results are shown in
Table 3. The total pressure recovery coefficient of boundary condition 1 is 99%, and the total pressure recovery coefficient of boundary condition 2 is 99.2%. The calculation results of the two simulations are close to the experimental values. For AC-Coarse with boundary condition 1, the separation efficiency is 82.5% and the separation efficiency of C-Spec is 90.9%, while the separation efficiency of boundary condition 2 AC-Coarse is 82.1% and the separation efficiency of C-Spec is 88.2%. It can be seen that the calculation result of boundary condition 1 is in better agreement with the experimental value than the calculation result of boundary condition 2. Where the SCR value of boundary condition two is 25.4%. Therefore, it is recommended to use the boundary conditions of the total inlet pressure and the flow outlet in the numerical calculation of IPS. Not only can SCR be controlled, but also the total pressure recovery coefficient and the separation efficiency of the two particles are close to the experimental values. Therefore, the calculation method used in Simulation 1 has a high degree of confidence and can be used for flow field simulation.
6. Conclusions
(1) The simulated boundary conditions of the particle separator were studied, and it was found that the simulated results of the boundary conditions of the total inlet pressure and the mass flow outlet were more accurate and closer to the experimental values.
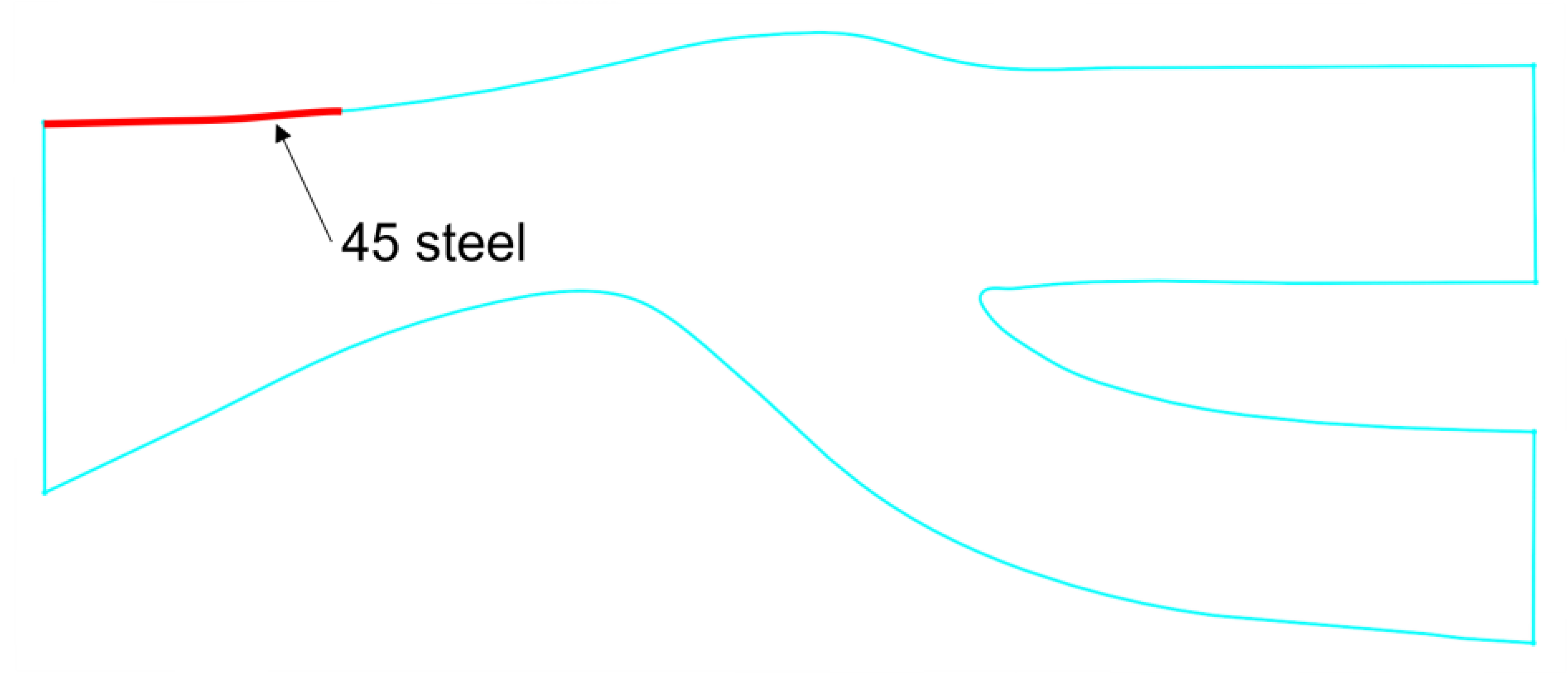
(2) By changing the 2024 aluminum alloy at the front end of the shroud inlet to 45-steel, the rebound trajectories of some particles were changed so that these particles were reflected from the bulge of the central body into the scavenge flow path. Among them, the separation efficiency of AC-Coarse was 93.3%, an increase of 12.4%, while the separation efficiency of C-Spec was 97.6%, an increase of 6.1%. The main particle size range of particles entering the core flow path was around 50 µm.
(3) A tandem IPS structure was established to improve the separation efficiency of IPS through a multi-stage separation configuration so that the particles can effectively improve separation efficiency of the particles after multiple rebounds. The separation efficiency of AC-Coarse was 91.7%, an increase of 10.8%, while the separation efficiency of C-Spec was 97.7%, an increase of 6.2%. However, the total pressure loss was 3.3%, and the main particle size range of particles entering the core flow path was around 100 µm. The next step in the research will be an optimization to decrease the separation efficiency to less than 3% to meet the requirements of IPS total pressure loss.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}