Abstract
Rotary machines often exhibit nonlinear behavior due to factors such as nonlinear stiffness, damping, friction, coupling effects, and defects. Consequently, their vibration signals display nonlinear characteristics. Entropy techniques prove to be effective in detecting these nonlinear dynamic characteristics. Recently, an approach called fuzzy dispersion entropy (DE–FDE) was introduced to quantify the uncertainty of time series. FDE, rooted in dispersion patterns and fuzzy set theory, addresses the sensitivity of DE to its parameters. However, FDE does not adequately account for the presence of multiple time scales inherent in signals. To address this limitation, the concept of multiscale fuzzy dispersion entropy (MFDE) was developed to capture the dynamical variability of time series across various scales of complexity. Compared to multiscale DE (MDE), MFDE exhibits reduced sensitivity to noise and higher stability. In order to enhance the stability of MFDE, we propose a refined composite MFDE (RCMFDE). In comparison with MFDE, MDE, and RCMDE, RCMFDE’s performance is assessed using synthetic signals and three real bearing datasets. The results consistently demonstrate the superiority of RCMFDE in detecting various patterns within synthetic and real bearing fault data. Importantly, classifiers built upon RCMFDE achieve notably high accuracy values for bearing fault diagnosis applications, outperforming classifiers based on refined composite multiscale dispersion and sample entropy methods.
1. Introduction
Rotating machines, such as gas turbines, industrial fans, aero-engines, gearboxes, and wind turbines, are widely used in different industrial and mechanical applications [1]. Rolling bearings are one of the most crucial and extensively used components in most rotating machines [2]. Because of improper initial assembly, low accuracy in manufacturing, and repetitively applied stress, bearing faults are unavoidable in long-term operations [3]. If bearings are not diagnosed and replaced promptly, it can cause disruptions in the operation of machines. For instance, bearing failures are accountable for around 40–50% of all failures that occur in electrical motors [4]. Thus, early fault detection using vibration data decreases maintenance costs and increases reliability [5,6].
Vibration signals involve the information on the dynamic features of machines and structures. Hence, their analysis is one of the conventional fault detection methods in rotating machines. Vibration signals generally represent nonlinear behavior due to effects associated with coupling, interactions, friction, damping, and nonlinear stiffness [7,8]. Therefore, the capabilities of linear feature extraction techniques have been limited in fault diagnosis [9], and researchers have focused on detecting nonlinear dynamical characteristics to improve fault diagnosis capabilities [10,11].
Due to various faults in ball bearings, including inner race faults, outer race faults, and rolling element faults, impacts with frequencies associated with the faults are generated. These impacts lead to the resonant excitation of the bearing. As a result, in each fault signal, the impacts are modulated by the much higher resonant frequencies of the bearing [12]. As a result, each fault creates different changes in signal complexity at different time scales. Hence, measuring signal complexity by calculating entropy over different scales (multiscale algorithms) is extensively applied to bearing fault diagnoses [13,14,15].
Entropy, as a measure of the irregularity and unpredictability of signal, is a powerful concept employed for evaluating the nonlinear features of a signal [16]. Sample entropy (SE), fuzzy entropy (FE), permutation entropy (PE) and fuzzy entropy (FE) are common entropy methods. Their advantages, disadvantages and some references of biomedical and mechanical applications are presented in Table 1.

Table 1.
Advantages, disadvantages and some applications of the most popular conventional entropy methods (SE, FE, PE and DE).
Nevertheless, DE is sensitive to its parameters, particularly the number of classes and embedding dimension [19]. To overcome these limitations, we have recently developed fuzzy DE (FDE) based on fuzzy membership functions for signal quantization and DE [19]. However, similarly to SE, FE, PE, and DE, FDE is unable to consider the multiple time scales that are present in data.
In order to overcome this limitation, Costa et al. [36] proposed multiscale SE (MSE) as a method for estimating the complexity of univariate data using the coarse-graining (CG) process. However, MSE inherits the SE limitations. Similarly, multiscale PE [37] and multiscale FE [38] have the shortcoming of PE and FE, respectively.
Apart from that, the CG procedure causes the signal length to be shorter as the scale factor increases. As a result, the higher the scale factor, the lower the accuracy of entropy [39]. To address this problem, Wu et al. [40] proposed composite MSE (CMSE) to improve the accuracy of MSE. Afterwards, proposing refined composite MSE (RCMSE), Wu et al. [41] decreased the probability of the undefined values of SE in the multiscale algorithm in addition to improving the accuracy of MSE. Multiscale algorithm refinement is also conducted in other studies, including refined composite multiscale fuzzy entropy (RCMFE) by Azami et al. [42], refined composite multiscale permutation entropy (RCMPE) by Humeau-Heurtier et al. [43], and refined composite multiscale dispersion entropy (RCMDE) by Azami et al. [33].
Wang et al. [44] used MDE to extract the features of bearing vibration signals, while Congzhi et al. [45], Zhang et al. [46], and Luo et al. [47] employed RCMDE for this purpose. Also, different techniques are applied with RCMDE, including fast ensemble empirical mode decomposition [48], adaptive sparest narrow-band decomposition [49], improved empirical wavelet transform [50,51], variational mode decomposition (VMD) [52], and improved VMD [14].
Nevertheless, all above-mentioned multiscale algorithms have the shortcomings of their corresponding entropy algorithms. To address these shortcomings, based on the advantages of FDE over existing entropy algorithms, multiscale fuzzy dispersion entropy (MFDE) and refined composite MFDE (RCMFDE) are developed in this article. The ability of these methods is evaluated by various synthetic and real datasets.
This paper is structured as follows: In Section 2.1 and Section 2.2, the descriptions of MFDE and RCMFDE are provided, respectively. Section 3 briefly describes the synthetic and real datasets used in this study. In Section 4.1, Section 4.2 and Section 4.3, the ability of RCMFDE to calculate complexities associated with white noise, logistic map series, and chirp signal is compared to MDE, RCMDE, and MFDE. In Section 4.4 and Section 4.5, the sensitivity to the signal length and the computation time of RCMFDE are investigated. Section 4.6 and Section 4.7 present the proposed method’s capability to distinguish between faulty and healthy bearings for simulated signals and the effect of noise on its performance. Section 4.8 evaluates the performance of the proposed method in fault diagnosis using three different datasets. Finally, Section 5 provides a conclusion.
2. Methods
In this paper, FDE is extended to RCMFDE and MFDE. This method is explained as follows.
2.1. Multiscale Fuzzy Dispersion Entropy
2.1.1. Coarse-Graining
The assessment of complexity in univariate signals is often accomplished via the utilization of a multiscale entropy framework, which encompasses two fundamental steps: the process of coarse graining to encompass multiple temporal scales and the evaluation of irregularity for each of these scales using entropy estimators.
at scale of series of length L is defined as follows:
2.1.2. Multiscale Fuzzy Dispersion Entropy Calculation
MFDE calculates FDE over some consecutive temporal scales. The FDE of each coarse graining signal is calculated. What is of note is that the average and standard deviation (SD) of the original signal remain unchanged for all scale factors, in agreement with keeping parameter r constant when calculating MSE [36].
2.1.3. Fuzzy Dispersion Entropy
Fuzzy dispersion entropy (FDE) for time series of length can be calculated using six steps [19]:
Step (1): First, time series x is normalized between 0 and 1 to obtain . Different linear and non-linear methods can be employed for this normalization [16,18]. However, the utilization of a linear mapping technique may result in an issue where the majority of xi values are assigned to only a few classes, especially when the maximum or minimum values deviate significantly from the signal’s mean/median values [16]. Consequently, DE with linear mapping exhibits poor performance in characterizing signals [16,18]. Many natural processes follow a pattern that starts slowly and accelerates, ultimately approaching a climax over time, similarly to a sigmoid function [7,53,54]. In cases where a detailed description is unavailable, a sigmoid function is commonly used [53,55]. Various sigmoid functions are available [18]. In accordance with the original formulation of DE [16], the normal cumulative distribution function, as a widely recognized sigmoid, was used. Series is obtained from the normal cumulative distribution function of series according to Equation (2):
where and are the SD and average of time series .
Step (2): In this step, time series is mapped onto classified time series [16]. Each is multiplied by and summed with 0.5.
where is the ith member of series , and is the class parameter indicating the number of all classes that can belong to [16].
Step (3): In DE, belongs to the kth class if it is closer to integer k [16]. Since ambiguity in allocating the members of series occurs in the boundaries of two classes, a fuzzy membership function is defined for each class, and represents the degree of membership of with respect to the kth class. Every is assigned to one or two classes (using integer indexes where ).
For designing a fuzzy membership function related to each class, the following conditions must be met:
- There is no boundary at the starting points of class 1 and end points of class c with other classes. Therefore, if is lower than 1 and higher than c, its degree of membership to classes 1 and c is equal to 1.
- The sum of the membership values of in different classes must be equal to 1.
- For a series of random numbers, the fuzzy membership functions possess equal relative cardinality.
- The overlap of the fuzzy membership function of each class with that of the adjoining classes can be 1 at most.
As mentioned above, different membership functions can be applied. This study employs triangular membership functions for classes and trapezoidal membership functions for classes 1 and . The applied fuzzy functions are expressed as follows:
Step (4): Time series with time delay and embedding dimension is constructed according to Equation (8):
Step (5): Dispersion patterns in the context of dispersion entropy refer to the distribution of data points within each embedded time series of length m. These embedded time series are generated by embedding the digitized versions of the original time series data into discrete classes [16,18].
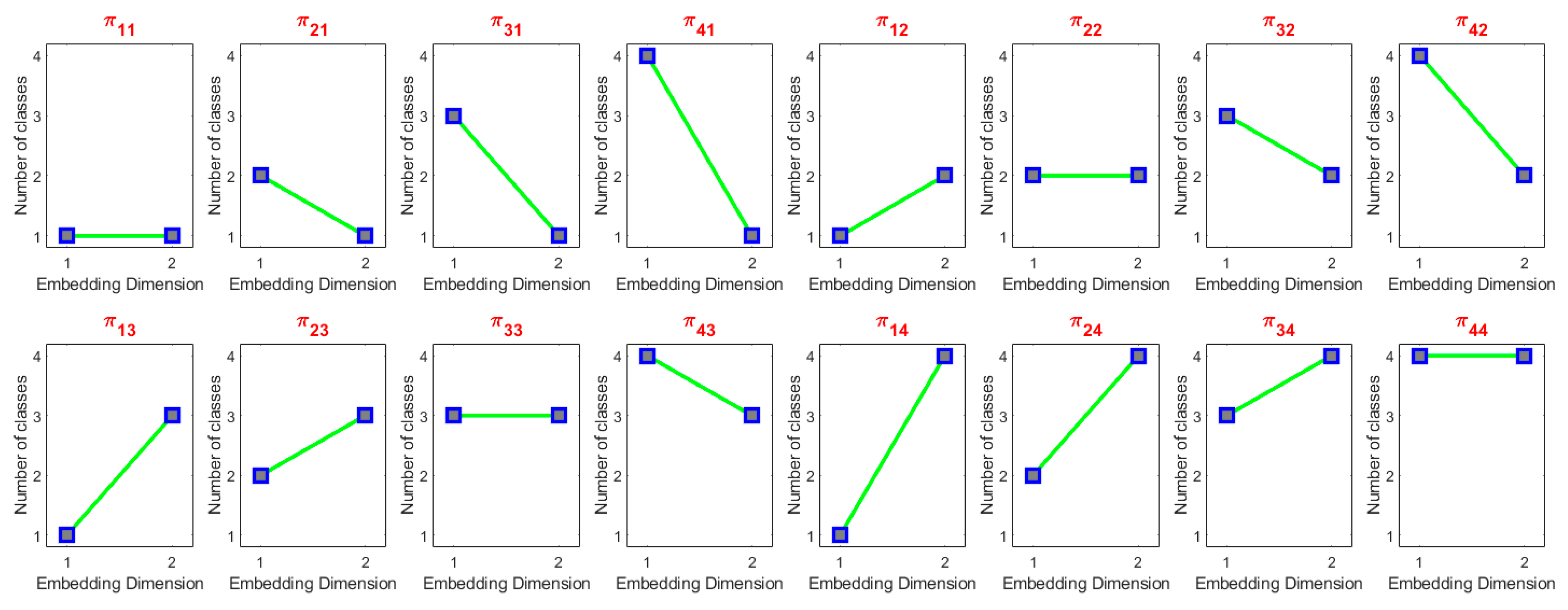
For each time series embedded into the dimensions of m and a given number of classes c, there exists a potential for the occurrence of dispersion patterns. Figure 1 illustrates all potential dispersion patterns for m = 2 and c = 4.
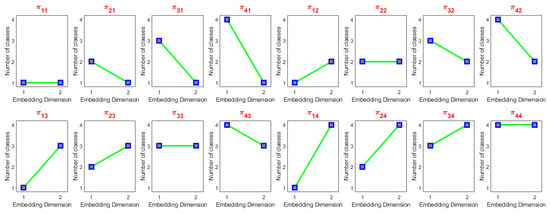
Figure 1.
All possible dispersion patterns for m = 2 and c = 4.
Each vector is mapped onto different dispersion patterns based on its membership values so that the following is the case:
When multiple states need to be true simultaneously (i.e., AND operator), t-norm is applied. The algebraic product operator is a t-norm, which is applied in the above fuzzy expression [19]:
According to Equation (9), the degree of membership of with respect to the pattern is equal to the product of the degree of membership of each with respect to class , where and .
Step (6): For each of dispersion pattern , the probability of presence in the time series is calculated. For this purpose, the sum of the membership degrees of dispersion patterns , attributed to all series , must be divided by the total number of embedded signals with embedding dimension m:
Step (7): Finally, based on Shannon entropy, FDE is calculated as follows:
2.2. Refined Composite Multiscale Fuzzy Dispersion Entropy
In calculating RCMFDE, for scale factor , different time series are created, corresponding to different starting points of the CG process. The kth coarse-grained time series of the original time series is obtained as follows:
The relative frequency of the fuzzy dispersion patterns of each of the time series is calculated.
The Shannon entropy of the average relative frequencies of fuzzy dispersion patterns for the time series created by different beginning points in the CG process is equal to RCMFDE. Therefore, RCMFDE for each scale factor is defined as follows:
In this equation, where is the relative frequency of fuzzy dispersion pattern in time series .
The number of possible dispersion patterns is recommended to be lower than the signal length . For MFDE, the CG process decreases the signal length to . Thus, for MFDE, it is suggested that . In RCMFDE, the coarse-grained time series of length are taken into account. Therefore, the number of all samples calculated in RCMFDE is and RCMFDE with the same length of gives reliable results. This particular feature is a matter of importance in short signals.
This study utilizes parameters m = 2, c = 3, and d = 1 to compute MDE, RCMDE, MFDE, and RCMFDE.
3. Evaluation Signals
To evaluate the effectiveness of RCMFDE to characterize different univariate time series and bearing fault diagnosis, we employ the following synthetic and bearing datasets.
3.1. Synthetic Signals
3.1.1. White Gaussian Noise and Noise
White Gaussian noise (WGN) and noise (pink noise) have been widely used for evaluating multiscale entropy techniques since WGN is less complex but more irregular than pink noise [33,56,57,58].
3.1.2. Logistic Map
The logistic map is a simple mathematical model that plays a key role in chaos theory since it illustrates the emergence of chaotic behavior from a relatively simple nonlinear equation. It is often used as a prototype example to understand the dynamics of chaotic systems [59]. The logistic map time series is defined as follows [60,61]:
where shows the logistic map at time step i, and it symbolizes the population at year i. As a result, signifies the initial population at time step 0, specifically set as . The parameter r functions as a control factor, representing a positive combined rate that encompasses both reproduction and starvation effects [62]. The first iterations of Equation (14) are ignored due to the transient behavior of the solution [63]. Chaotic behaviors occur for [61]. The logistic map was used to evaluate the performance of MFDE and RCMFDE in estimating the complexity of data.
3.1.3. Chirp Signal and Amplitude-Modulated Chirp Signal
To investigate the relationship of the proposed methods with variations in time and frequency domains, two types of signals were synthesized. For the first type of signal, a constant-amplitude chirp signal was selected, with its frequency logarithmically varying within the range of 2 to 15 Hz. For the second type, the same signal as the first type was modulated with a pure sinusoidal wave. These two signals were generated with a sampling frequency of 100 Hz and a duration of 40 s.
3.1.4. Faulty Bearing Simulation
A local fault in a bearing produces a periodic impact signal that leads to the resonant excitation of the bearing; therefore, it is modulated by the significantly higher resonant frequencies of the bearing [12]. The simulated vibration signal for a bearing of a rotating machine with outer ring damage is defined as follows [8]:
where and are the series of impulses and the harmonic component, respectively. Also, represents noise. Based on previous studies [8,64,65], is modeled by Equation (14) [8].
is a representation of a small and random fluctuation in the time interval between two successive impulses. The frequency of the impulse train signal is considered equal to without taking into account the impact of accidental slipping by the balls and taking into account a constant period. Nevertheless, considering the ball, the slipping effect changes the period randomly to [8]. For each k, is assumed to be a random number from a normal distribution of zero average and SD [8].
Equation (17) defines the harmonic component with two sine functions [12,66]:
This paper assumes the fault characteristic frequency and damping coefficient as and , respectively. Also, and are the resonant frequencies of the bearing. The impulse amplitude magnitude factors are and , which specifies the damage intensity. The first and second harmonic amplitudes of the rotor are and , respectively.
3.2. Bearing Datasets
3.2.1. Paderborn University Dataset
Ball bearing data were provided by the KAT datacenter in Paderborn University [67,68]. The experimental setup includes an electric motor, a torque meter, a flywheel, a bearing test module, and motor load. Bearings with different fault conditions are mounted on the test module to produce experimental data.
Datasets used in this paper involve four different bearing fault conditions: (1) healthy condition (H), (2) sharp trench on the outer ring (STO) by electrical discharge machining, (3) drilling on the outer ring (DO), and (4) artificial pitting on the outer ring (PO) by electric engraver. The used datasets are listed in Table 2. The vibration signals of rolling bearings in different operational states were gathered using a sampling frequency of 64,000 Hz, as demonstrated in Table 3.
Table 2.
Applied datasets for four different bearing fault conditions.
Table 3.
Operational conditions.
3.2.2. PHMAP 2021 Data Challenge Dataset
A subset of the PHMAP 2021 data challenge dataset [54] was utilized. The equipment under investigation comprises an oil injection screw compressor featuring a 15 kW motor operating at 3600 rpm and a screw axis rotating at 7200 rpm. The data collected for this study were acquired using an accelerometer installed on the motor, with a sampling frequency of 10,544 Hz.
Datasets used in this paper involve three different fault conditions: (1) high V-belt looseness, (2) defective bearing, and (3) fault-free state.
3.2.3. Case Western Reserve University Dataset
The Case Western Reserve University (CWRU) dataset [69] was also employed to evaluate the proposed method’s performance in the discrimination of bearing faults. The dataset prepared by the bearing data center of CWRU is a standard reference in the field bearing fault diagnosis [70]. The experimental setup used in data acquisition includes a three-phase electric motor of 2 hp power, a dynamometer, and a self-aligning coupling.
In this study, 6205-2RS JEM SKF ball bearings were used. Single-point faults with different diameters were created on bearings via electrical discharge machining. Bearing vibration signals were gathered from an accelerometer mounted on the casing at the drive end of the motor.
4. Results and Discussion
4.1. Analysis of White Gaussian Noise and Noise
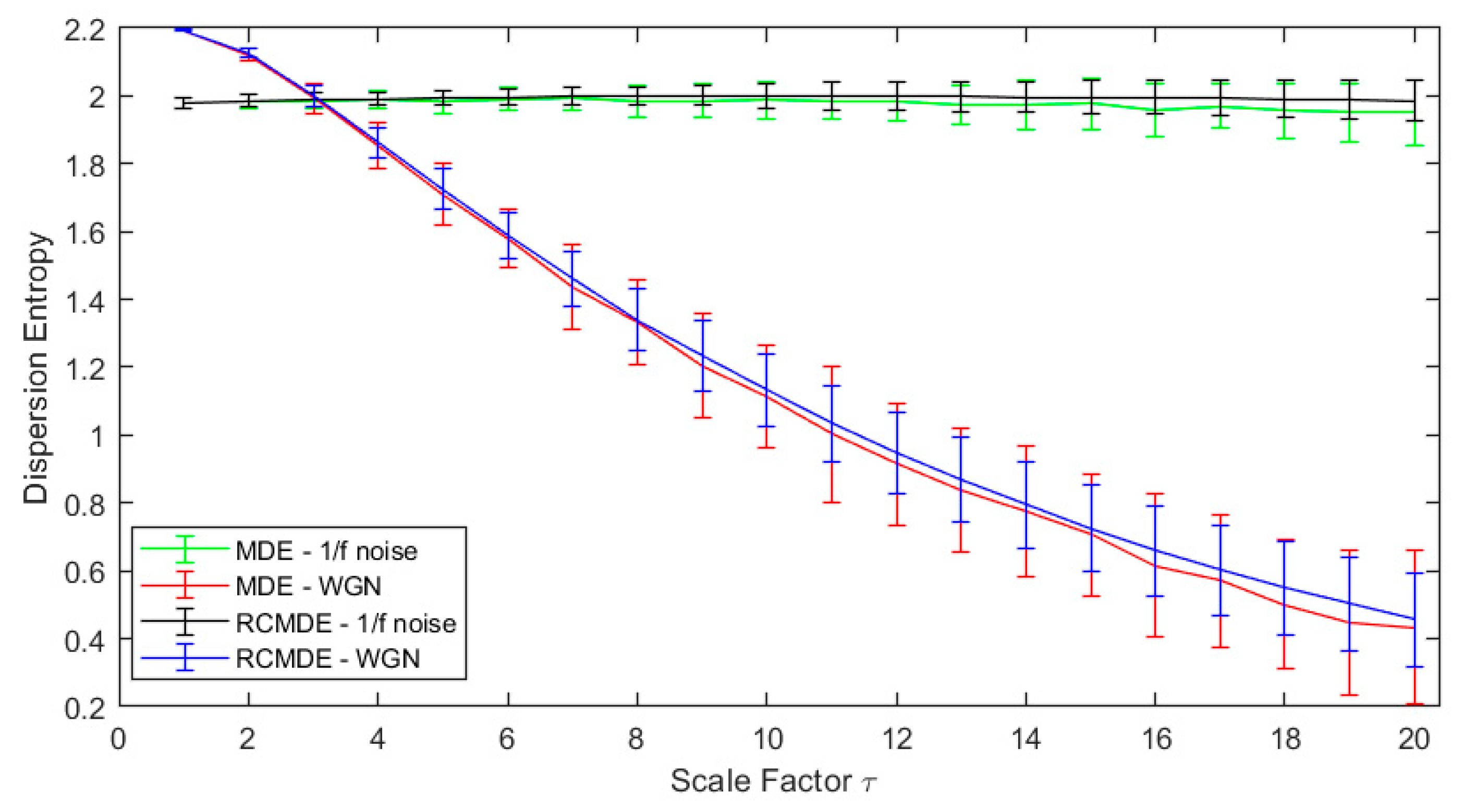
One hundred independent white Gaussian and one hundred independent pink noise series of 1000 data point length were created. MFDE, MDE, RCMDE, and RCMFDE were then applied to these signals for scale factors 1–20 (Figure 2 and Figure 3).
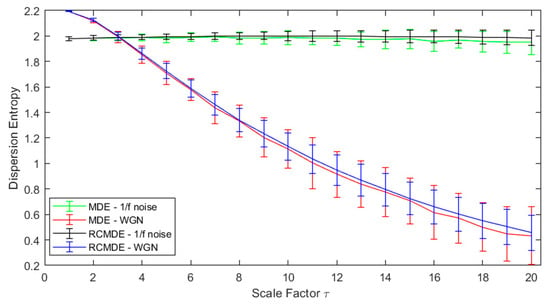
Figure 2.
RCMDE and MDE at 20 scales for white and pink noise.
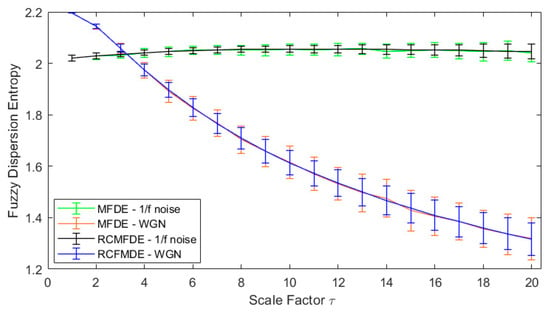
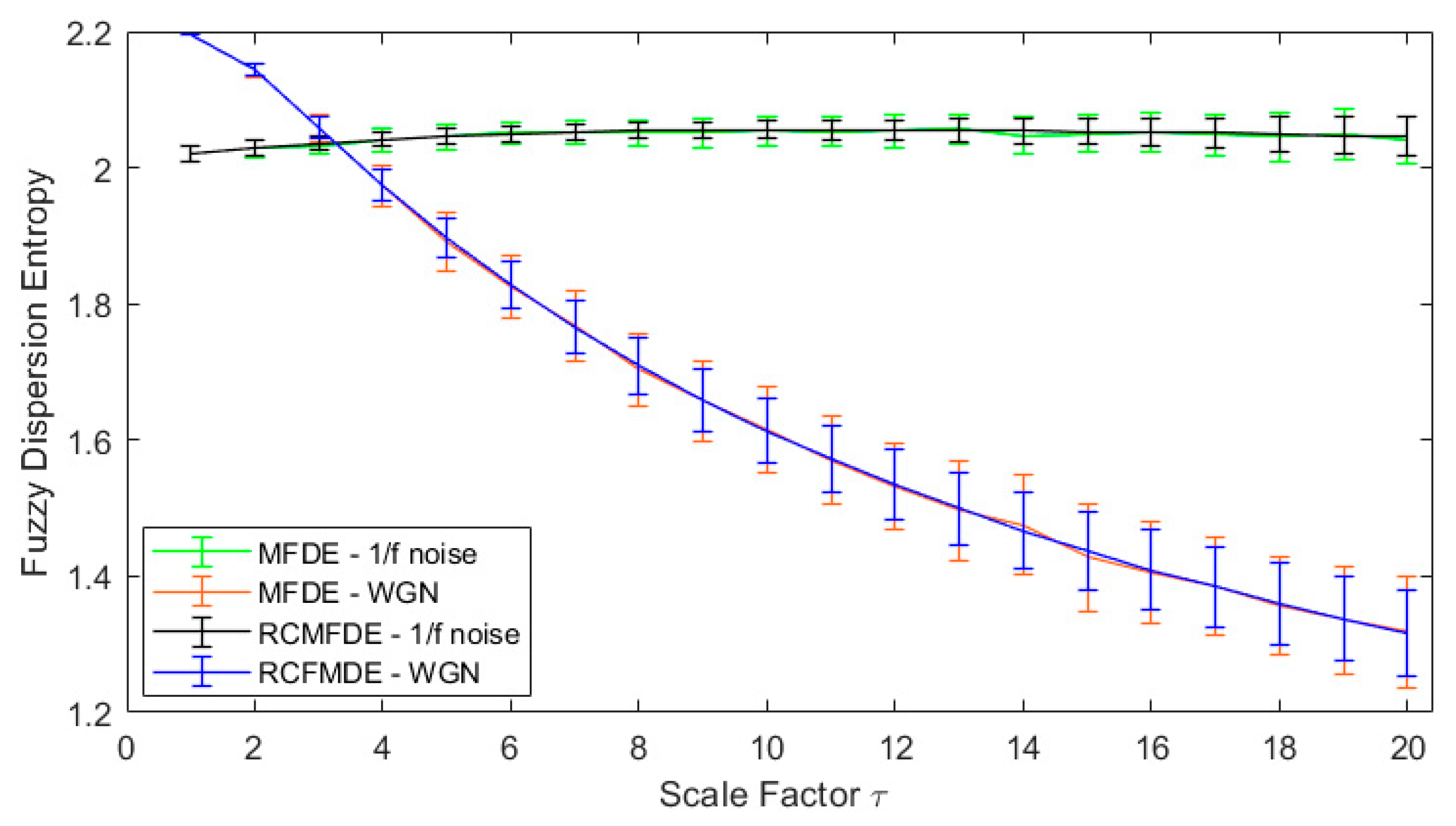
Figure 3.
RCMFDE and MFDE at 20 scales for white and pink noises.
In all the examined methods, the entropy of the time series of coarse-grained pink noise is kept almost constant, while it is reduced uniformly by increasing the scale for the WGN. Consequently, at low scale factors (), the entropy of white noise is higher than the pink one. At high scale factors (), the entropy of pink noise is higher than that for the white noise. These results confirm the fact that the complexity of pink noises is higher than WGN while the uncertainty of WGN is more than that for the pink noise [56,57,71].
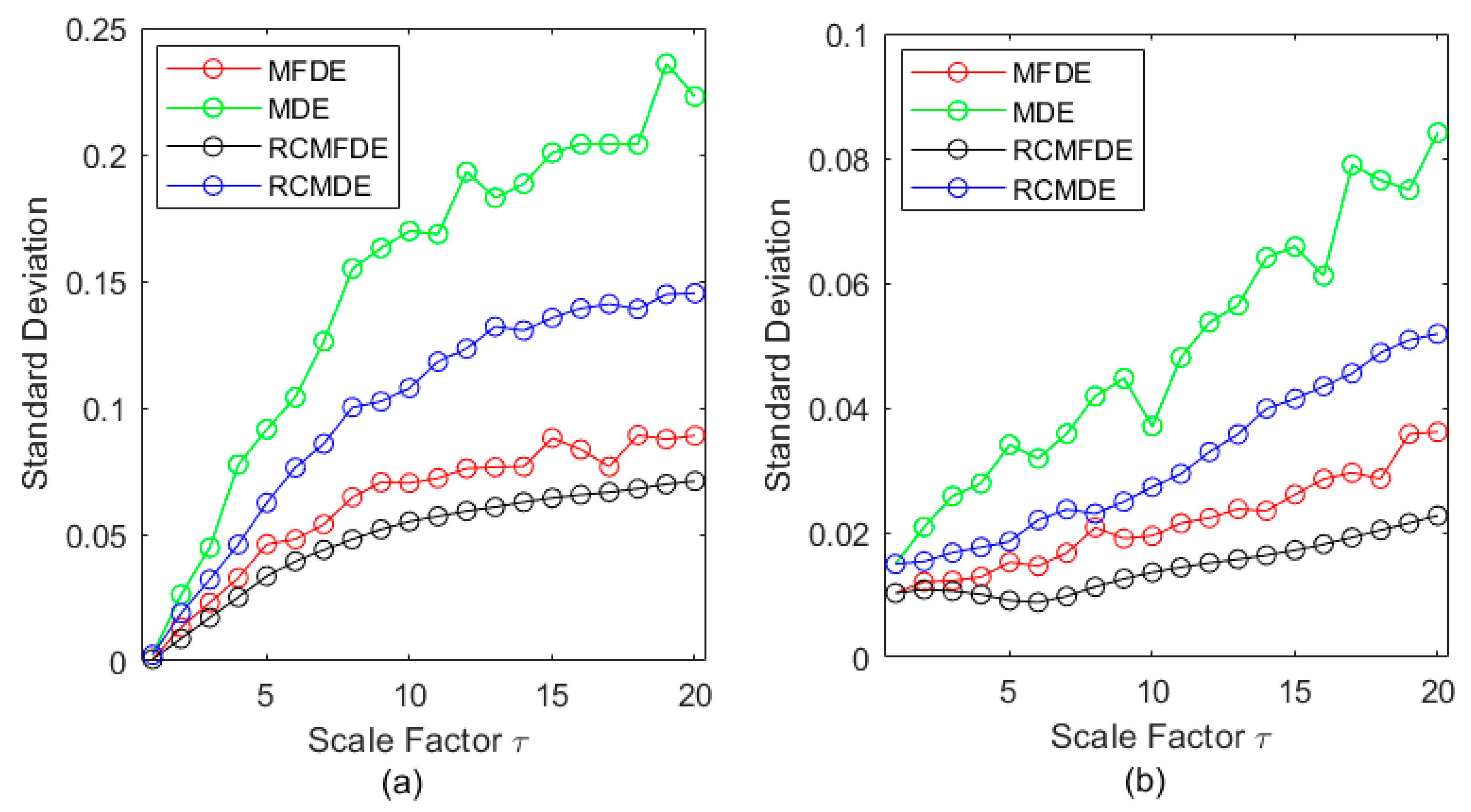
To assess the stability of the MDE, MFDE, RCMDE, and RCMFDE results, we calculated the SD of their results at each scale factor (Figure 4). The SD values suggest that MFDE and RCMDE, respectively, are more stable than MDE and RCMDE, and the lowest SD was obtained based on RCMFDE.
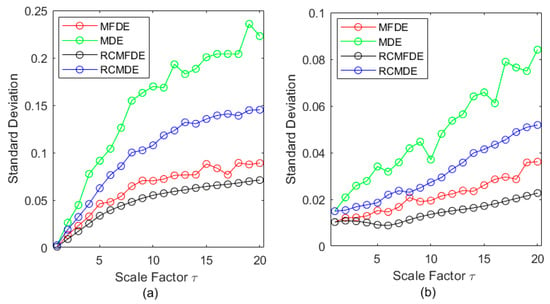
Figure 4.
SD of MDE, MFDE, RCMDE, and RCMFDE for one-hundred independent (a) white noise and (b) pink noise time series.
4.2. Analysis of Logistic Map
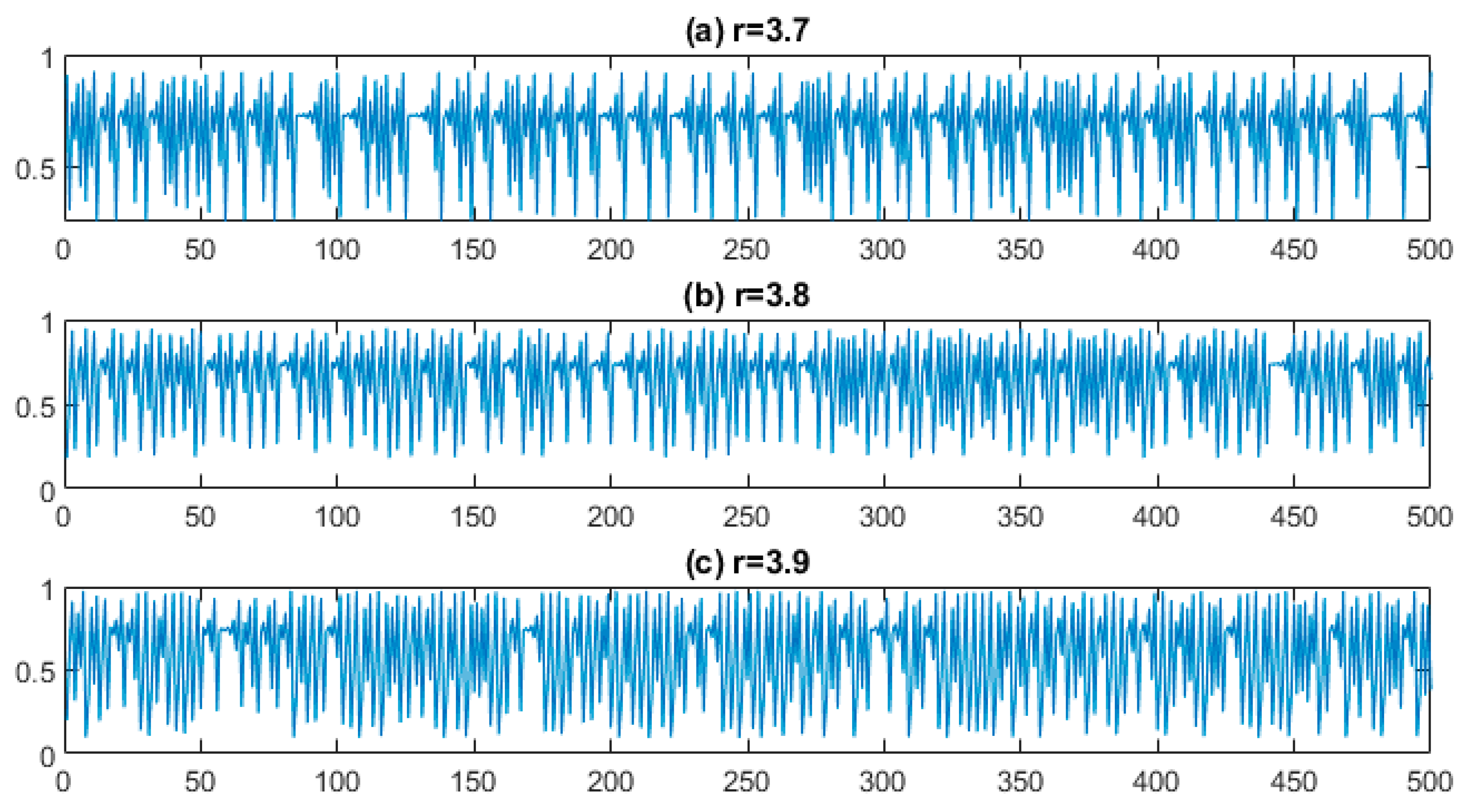
Three logistic map series of length 500 samples with parameters of based on Equation (14) are created, as shown in Figure 5. Theoretically, the complexity of four signals increases by increasing r.
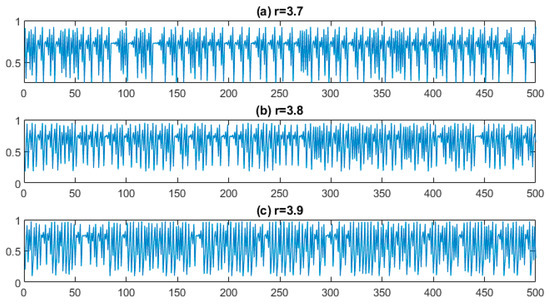
Figure 5.
The waveforms resulting from the logistic map change: r = 3.7 (a), 3.8 (b), and 3.9 (c).
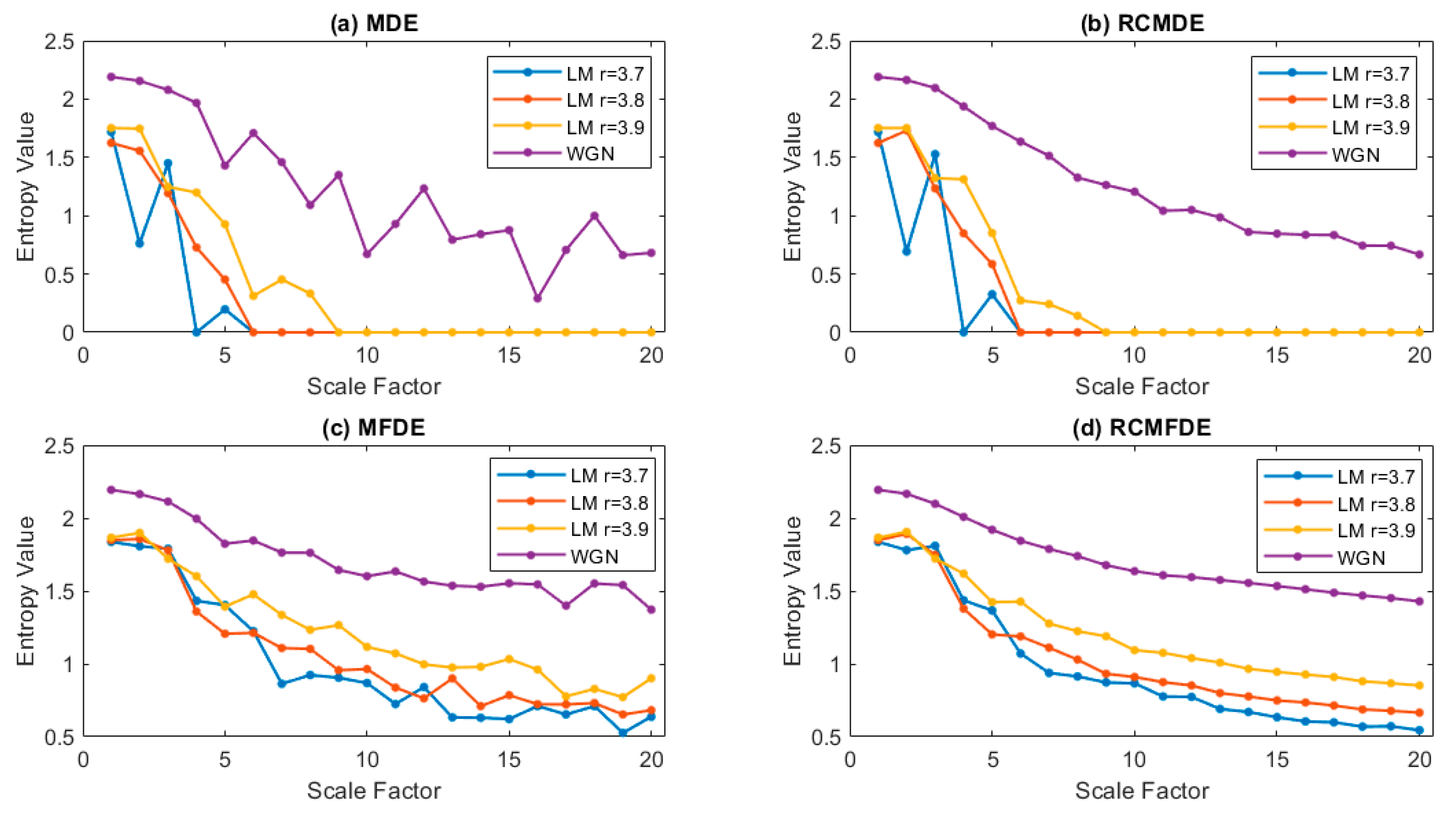
RCMFDE, MFDE, MDE, and MFDE are calculated for these three series and one WGN for scales 1–20 (Figure 6). The results show that RCMFDE is the only method that, after scale 5 (6 to 20), exhibits curves that conform with the arrangement of complexity among different r values. The results suggest that RCMFDE is the most appropriate measure of complexity in comparison with MDE, RCMDE, and MFDE.
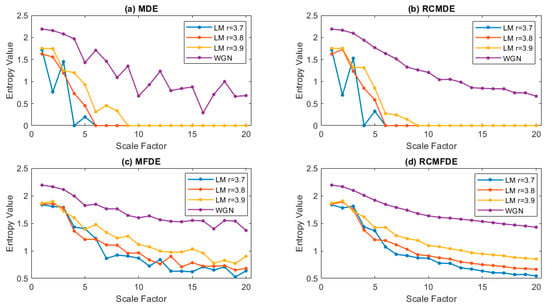
Figure 6.
The complexity of logistic map signals with different r values and WGN. (a) MDE, (b) RCMDE, (c) MFDE, and (d) RCMFDE.
4.3. Analysis of Chirp signals and Amplitude-Modulated Chirp Signal
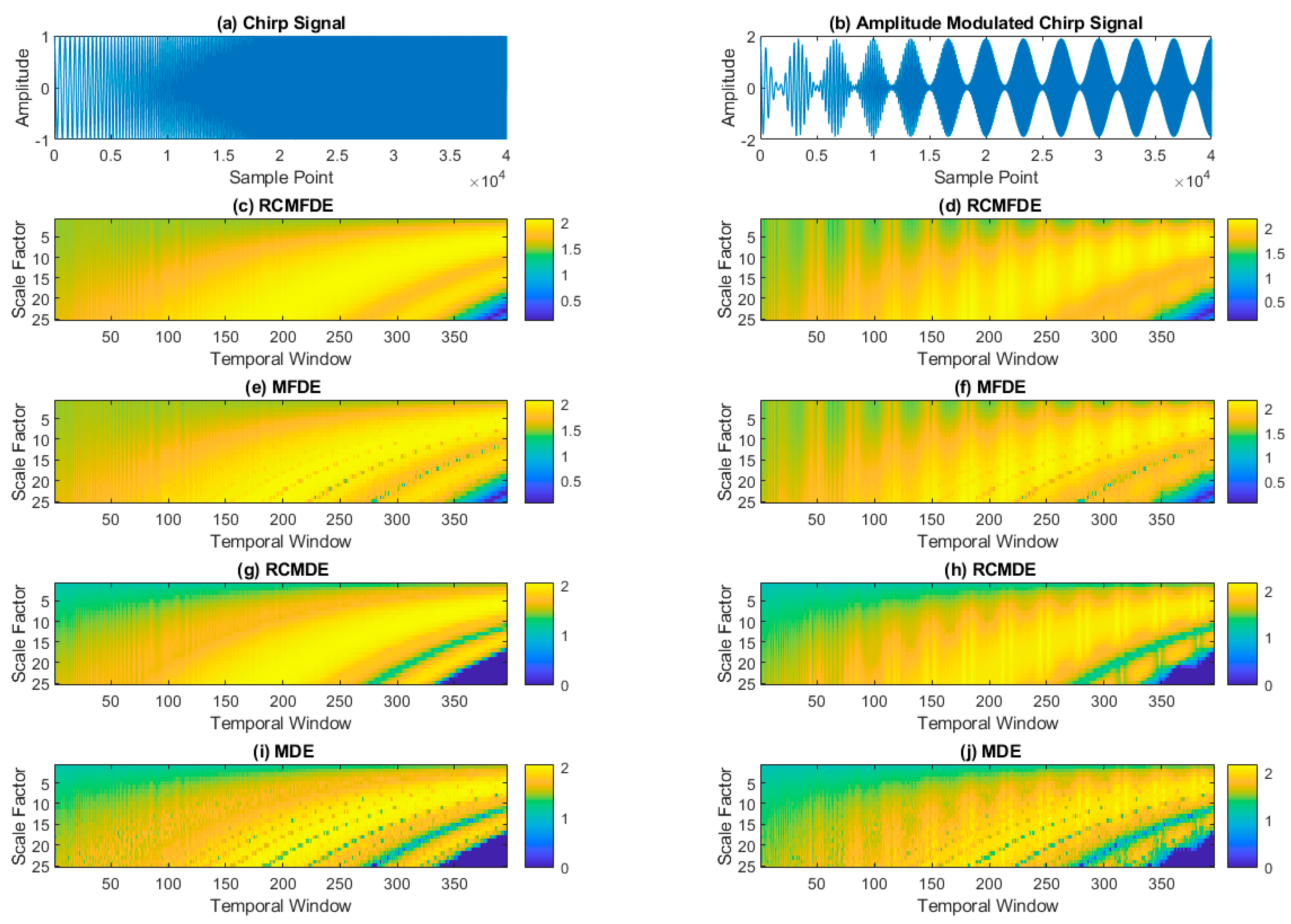
One chirp signal and one modulated chirp signal, as described in the section, are used to investigate the impact of domain and frequency variations of sinusoidal signals. These two signals are depicted in Figure 7a,b. A moving window of length of 500 samples slid over the signals with an 80% overlap between windows. For each isolated signal, the values of RCMFDE, MFDE, RCMDE, and MDE were computed.
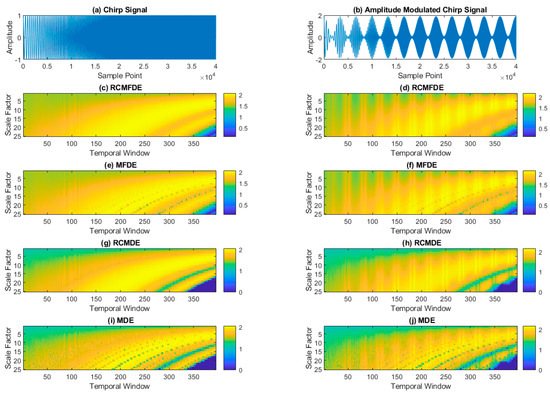
Figure 7.
The results of (c) RCMFDE, (e) MFDE, (g) RCMDE, and (i) MDE on (a) chirp signals in comparison to the results of (d) RCMFDE, (f) MFDE, (h) RCMDE, and (j) MDE on (b) amplitude-modulated chirp signals.
As depicted in Figure 7c,e,g,i, all methods adeptly capture frequency variations. In the initial segments of the signals where the frequency is lower, smaller scale values exhibit higher entropy. Conversely, as frequency increases, the entropy in higher scales also increases. Furthermore, Figure 7d,f,h,j. demonstrate that all methods exhibit domain variations in the modulated signal. However, in scales smaller than 10 and window sizes ranging from 1 to 150, while both RCMFDE and MFDE are capable of indicating domain changes, RCMDE and MDE are less effective at detecting these domain variations within this segment of the signal and for scales below 10.
4.4. Sensitivity to Signal Length
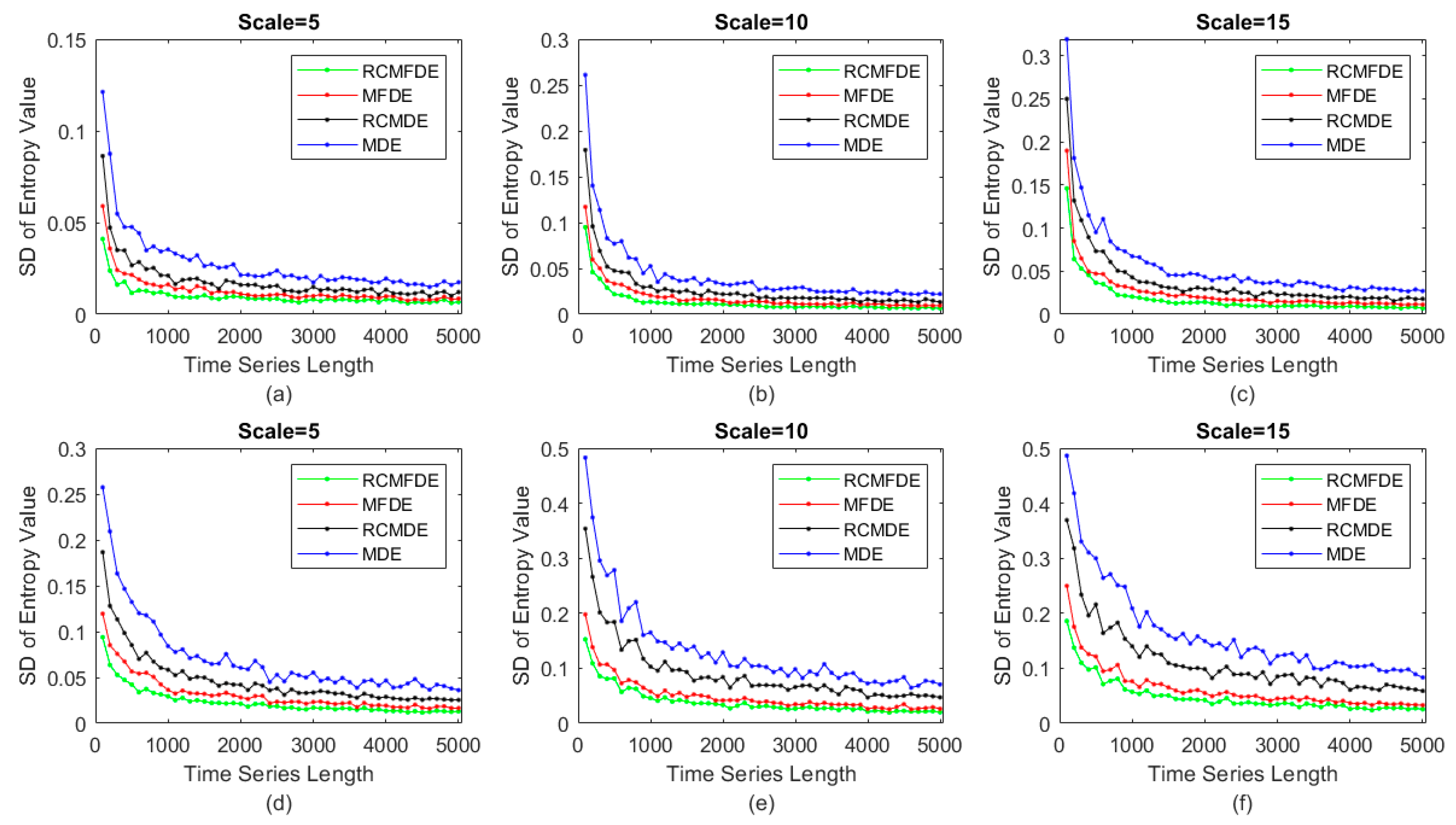
In this section, we conduct a comparative analysis of RCMFDE, MFDE, RCMDE, and MDE in terms of their sensitivity to signal length. To achieve this objective, we employ WGN and noise with varying sample points denoted as N. The signal lengths are systematically varied, spanning from 100 to 5000 samples. For each unique value of N, 100 independent WGN and noise signals are generated.
The standard deviation (SD) of the obtained results at scale = 5, 10, and 15 is computed and presented in Figure 8. The findings underscore several key observations: Firstly, as the values of N increase, the corresponding SDs decrease, yielding more stable outcomes. Secondly, when comparing the SD of outcomes obtained via RCMFDE and MFDE with those of RCMDE and MDE, it becomes evident that the former exhibits lower SDs. Consequently, the outcomes obtained from RCMFDE and MFDE demonstrate greater stability compared to those of MDE and RCMDE.
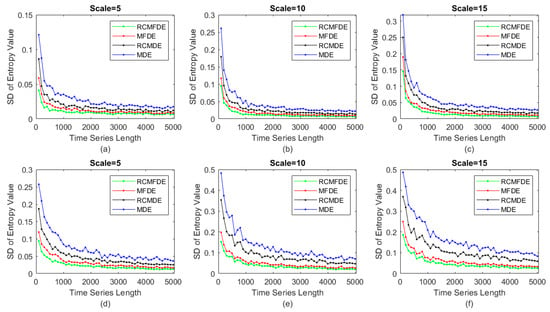
Figure 8.
SD of results obtained from RCMDFE, MFDE, RCMDE, and MDE for 100 independent instances of noise at scales (a) = 5, (b) = 10, and (c) = 15 and 100 independent instances of WGN at scales (d) = 5, (e) = 10, and (f) = 15.
4.5. Computation Time
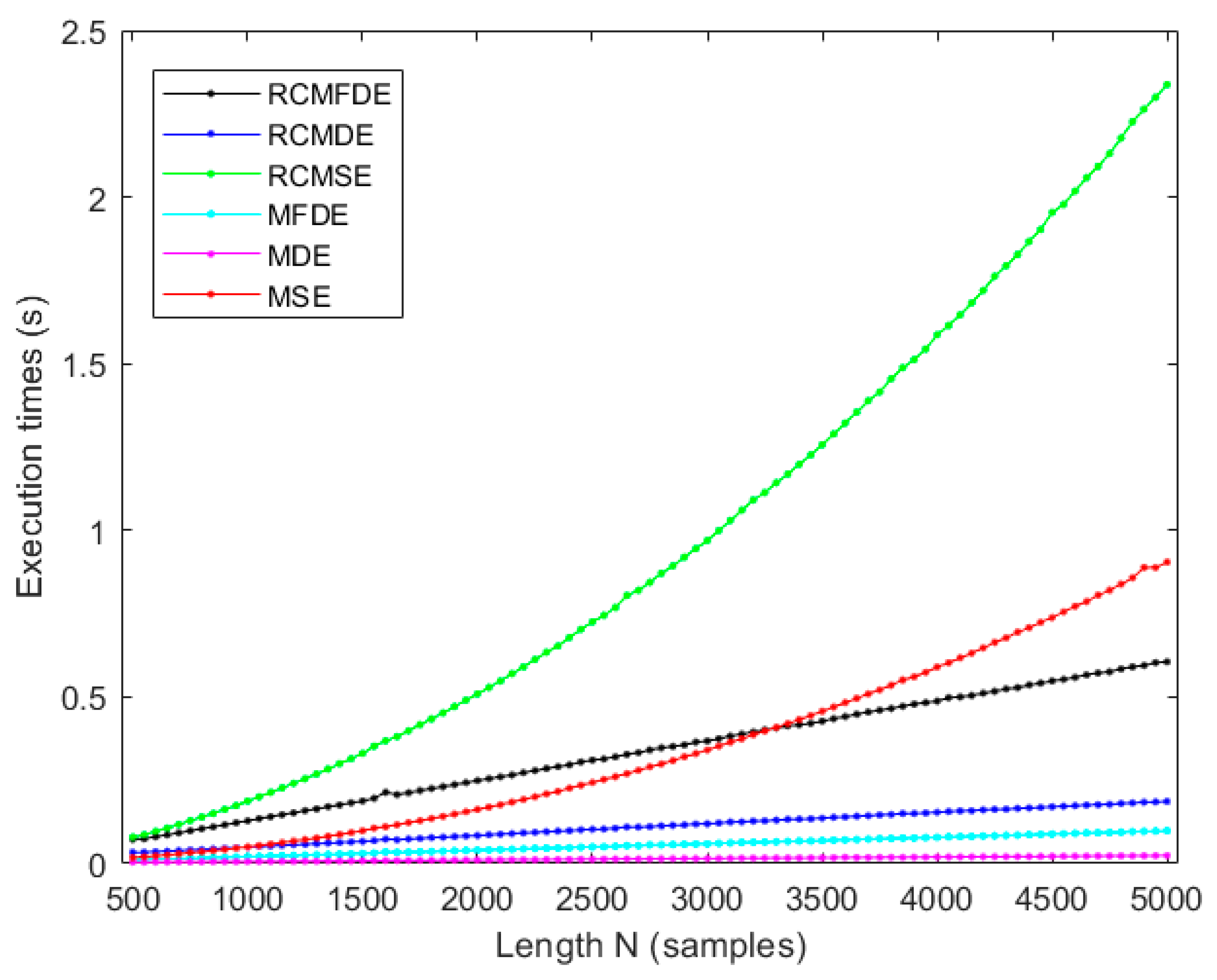
To assess the computational efficiency of RCMFDE and RMFDE in comparison to RCMSE, MSE, RCMDE, and MDE, we employ the white Gaussian noise (WGN) sequences of varying lengths, ranging from 500 to 5000 sample points. The outcomes of these evaluations are illustrated in Figure 9. The simulations were executed on an Asus laptop equipped with an Intel(R) Core(TM) i5-8250U processor operating at 1.6 GHz and 8 GB of RAM, utilizing MATLAB R2021a.
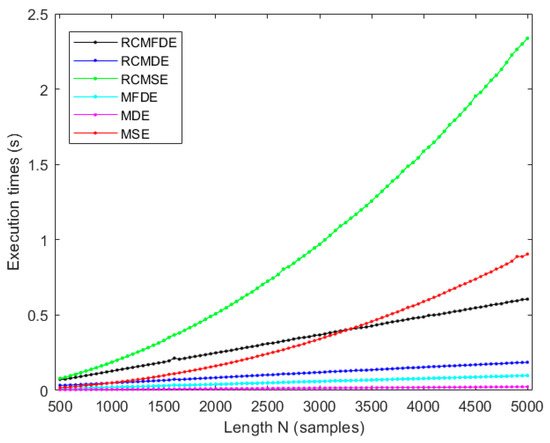
Figure 9.
Evaluating the computational times of RCMFDE, RCMDE, RCMSE, MFDE, MDE, and RCMSE for white Gaussian noise (WGN) series of varying lengths.
As illustrated in Figure 9, although the computation time for RCMFDE is greater than that of RCMDE, and similarly, the computation time for MFDE exceeds that of MDE, the computation time for RCMFDE in comparison to RCMSE, as well as for RMFDE in comparison to RMSE, is significantly lower. These results are in agreement with the fact that the computational complexity of calculating SE is O(N2), while DE approaches have the computational complexity of O(N2) [18,72].
4.6. Simulated Bearing Signal Analysis
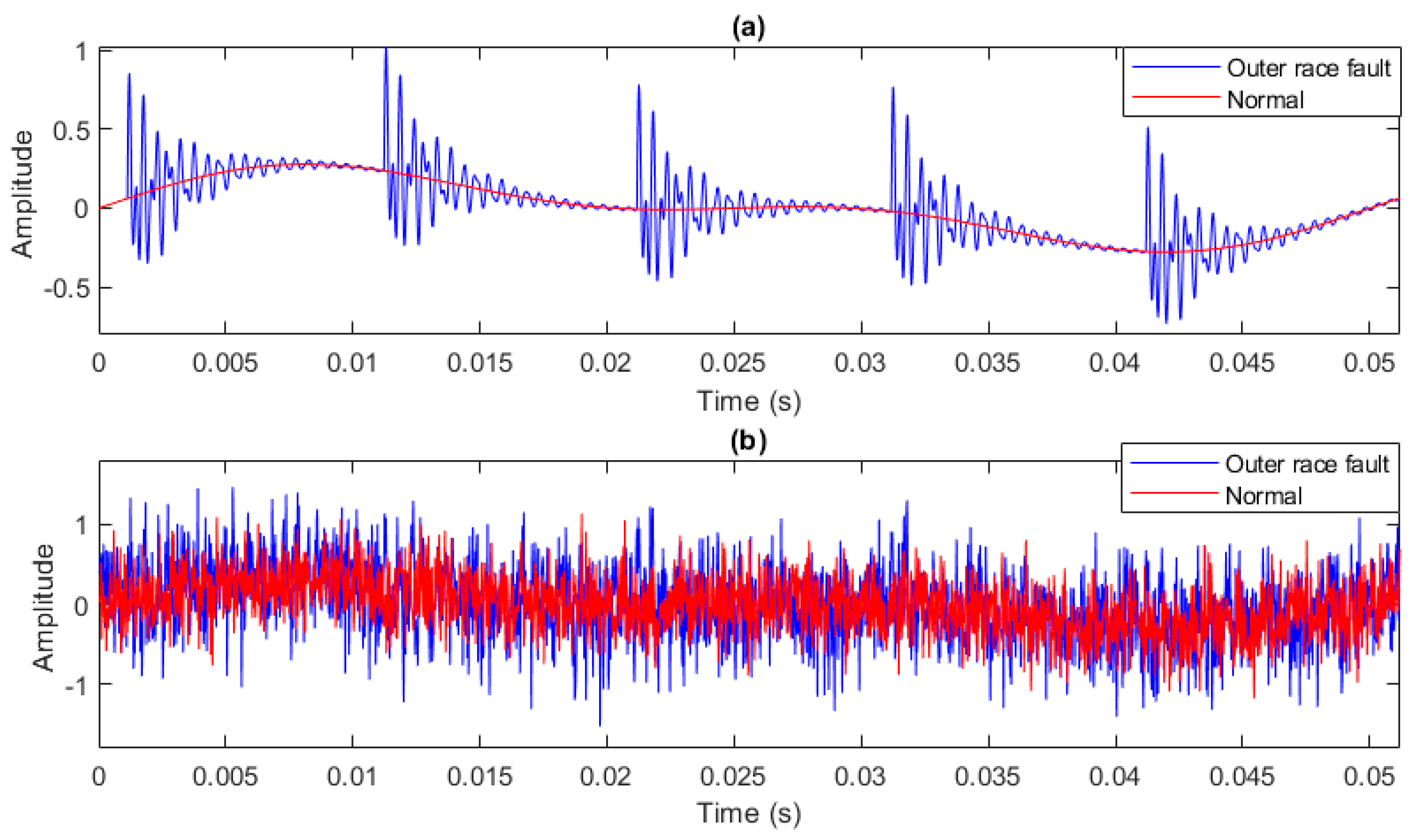
According to Section 3.1.3, fifty independent signals of faulty and healthy bearings with a length of 2048 data points and a sampling frequency of 40 kHz are simulated in this section. Also, is assumed to be a WGN so that the variance of the signal-to-noise ratio (SNR) is 0.257 [73]. By eliminating the fault impulses, the healthy bearing signal is modeled. Figure 10 depicts an instance of simulated signals with and without noise.
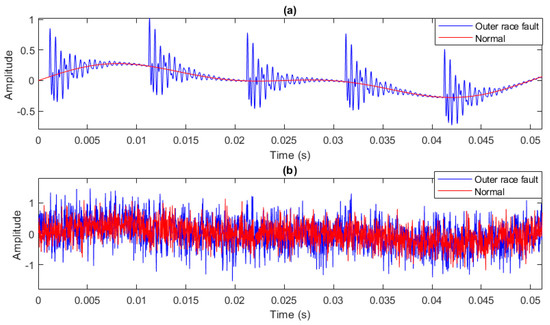
Figure 10.
A simulated bearing signal: (a) without noise and (b) with noise.
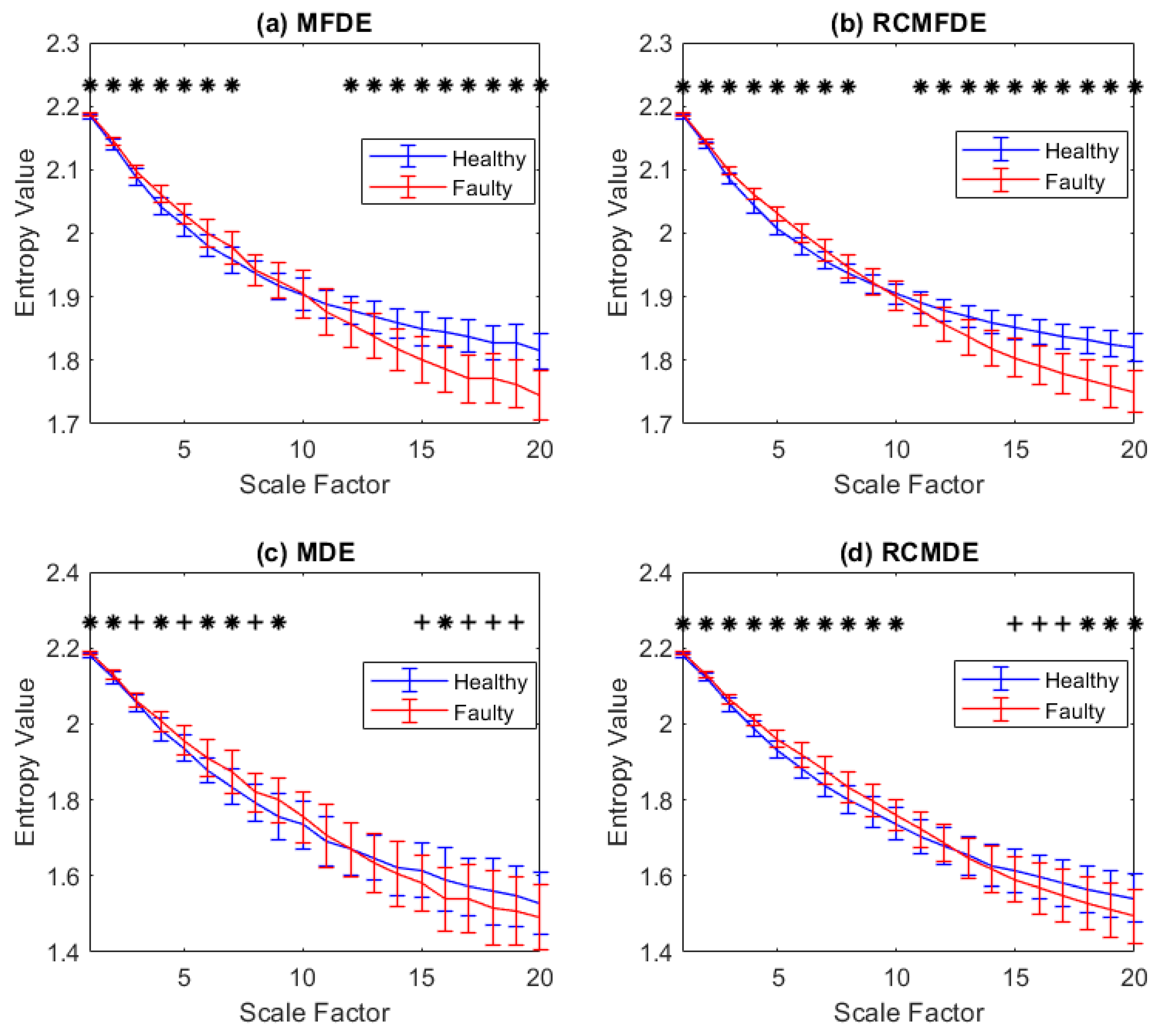
The MFDE, RCMFDE, MDE, and RCMDE of the simulated signals are calculated at 20 time scales. Based on the means and SDs of the results, as depicted in Figure 11, only the results of RCMFDE at three specific scales are distinctly separable without overlap, while the results of other methods exhibit overlap across all scales.
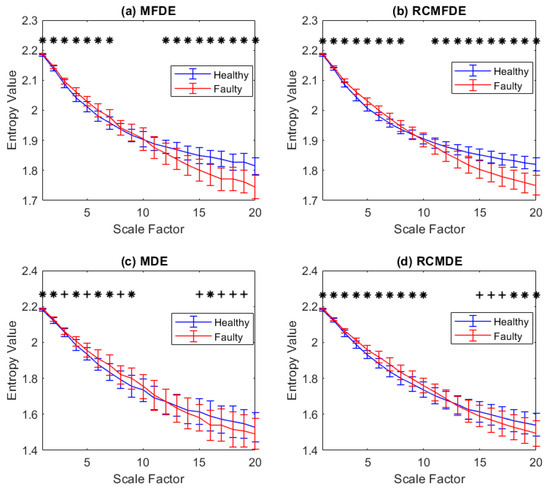
Figure 11.
Mean value and SD of results of (a) MFDE, (b) RCMFDE, (c) MDE, and (d) RCMDE computed from healthy and faulty bearing simulated signals. The scale factors with p-values between 0.01 and 0.05, and smaller than 0.01 are respectively shown with + and *.
For each scale factor, Student’s t-test is used to examine statistical differences. The scale factors with a p-value between 0.05 and 0.01 (significant) and lower than 0.01 (very significant) are indicated with symbols + and ∗ in Figure 11. The RCMDE-based results have very significant difference at 18 scale factors (all scales except scales 9 and 10). However, MFDE, RCMDE, and MDE, respectively, lead to (very) significant differences at only 16, 16, and 14 scale factors. This fact suggests that RCMFDE has a higher capability of discrimination between the simulated signals of faulty and healthy bearings than MFDE, RCMDE, and MDE.
Furthermore, the Hedges’ g effect size [74] was employed to assess the distinguishing capability between simulated signals from faulty and healthy bearings. The results are presented in Table 4. The effect sizes of the RCMFDE and MFDE outcomes, when compared to RCMDE and MDE, consistently exhibit higher values across nearly all scales, except for three specific scales. This observation underscores the superior ability of RCMFDE and MFDE in distinguishing between simulated faulty bearings and healthy bearings. Moreover, the effect size of RCMFDE results consistently exceeds that of MFDE across all scales. Consequently, RCMFDE exhibits a greater capacity, relative to MFDE, in effectively distinguishing between simulated faulty bearings and healthy ones.
Table 4.
Differences in results for faulty bearing vs. healthy bearing obtained by RCMFDE, MFDE, RCMDE, and MDE based on Hedges’ g effect size.
4.7. Noise Effect
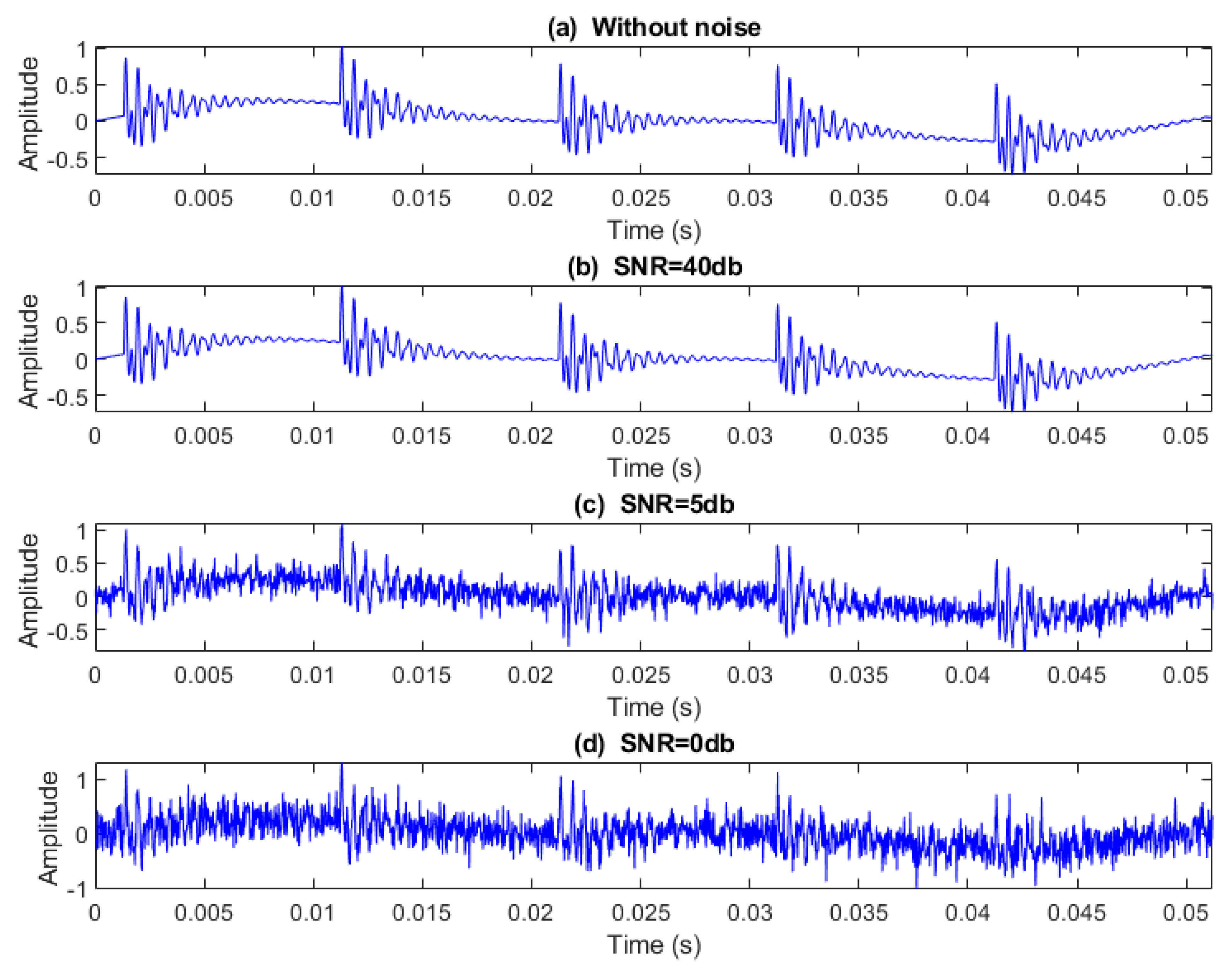
In order to indicate the effect of adding noise to bearing signals, 50 independent realizations of WGNs were added to faulty bearing signals at different SNRs, and the sensitivities of MFDE, RCMFDE, MDE, and RCMDE to noise are evaluated. According to Section 3.1.3, fifty faulty bearing signals of 2048 data point length and a sampling frequency of 40 kHz are simulated without adding noise.
NrmEntN(i) is the measure of sensitivity to WGN in scale i [18].
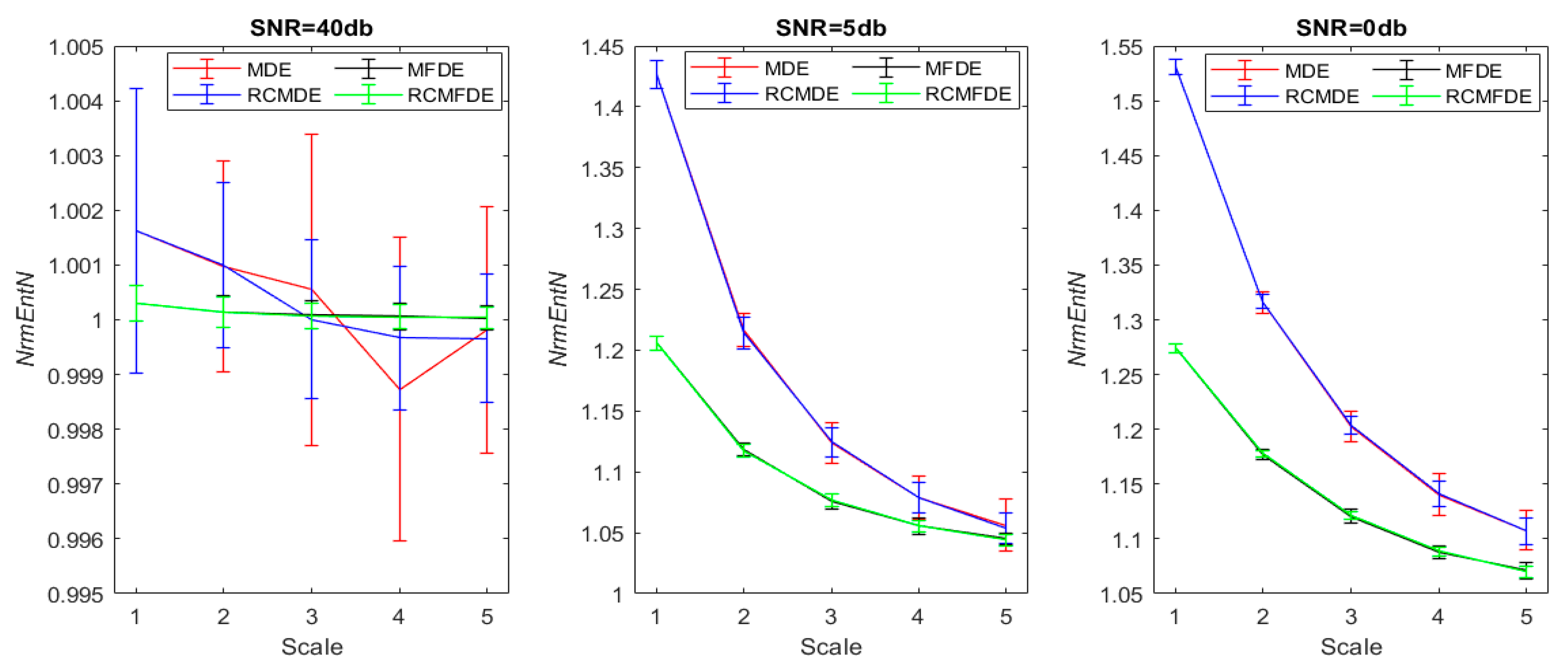
NrmEntN is calculated for MFDE, RCMFDE, MDE, and RCMDE for five scales by adding the WGN of different SNRs (0, 5, and 40 dB) to simulated signals. Figure 12 shows a simulated signal with/without the noise of different SNRs. Figure 13 and Table 5 present the average and SD of NrmEntN for different entropy methods over five scales.
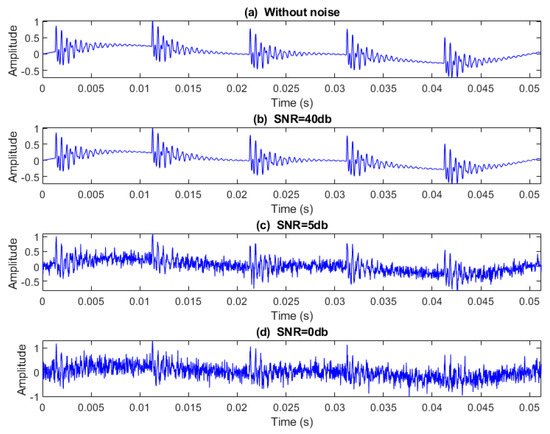
Figure 12.
A simulated signal: (a) without noise and with additive WGN with respect to (b) SNR = 40 dB, (c) SNR = 5 dB, and (d) SNR = 0 dB.
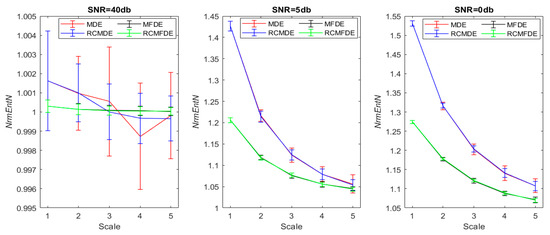
Figure 13.
Average and SD of NrmEntN obtained via MDE, RCMDE, MFDE, and RCMFDE from 50 simulated faulty bearing signals with 50 independent additive realizations of WGNs relative to different noise power. NrmEntN compares the sensitivity of MDE, RCMDE, MFDE, and RCMFDE to WGN with different SNRs.
Table 5.
Average and SD of NrmEntN obtained via MDE, RCMDE, MFDE, and RCMFDE from 50 simulated faulty bearing signals.
The NrmEntN values obtained based on MFDE and RCMFDE, compared with MDE and RCMDE, have average values closer to 1 and also have a lower SD values. Therefore, MFDE and RCMFDE have lower sensitivities relative to WGN than MDE and RCMDE, and they are more resistant to noise. In addition, the SD of NrmEntN values in the RCMFDE method is lower than that for MFDE, indicating that RCMFDE is less sensitive to noise than MFDE.
4.8. Experimental Data Analysis
4.8.1. Fault Diagnosis with respect to the Paderborn University Bearing Dataset
There are 60 measured datasets for each fault condition of the bearings. Five samples with a length of 2048 were separated from each measured dataset, thus generating 300 samples for each fault condition. MSE, RCMSE, MDE, RCMDE, MFDE, and RCMFDE were calculated for all signals over 20 scales. The results of each method were classified. From the signals for each fault condition, 480, 120, and 600 samples are utilized as training, validation, and test data, respectively.
A multiclass adaptive neuro-fuzzy inference system with fuzzy c-means clustering (FCM-ANFIS) [8] was used as the classifier in this study. A binary vector was applied as the target vector for each fault condition. Since four fault conditions were examined in this section, the length of each binary vector was 4, and the applied classifier was composed of four FCM-ANFIS; each determines one entry of the target vector.
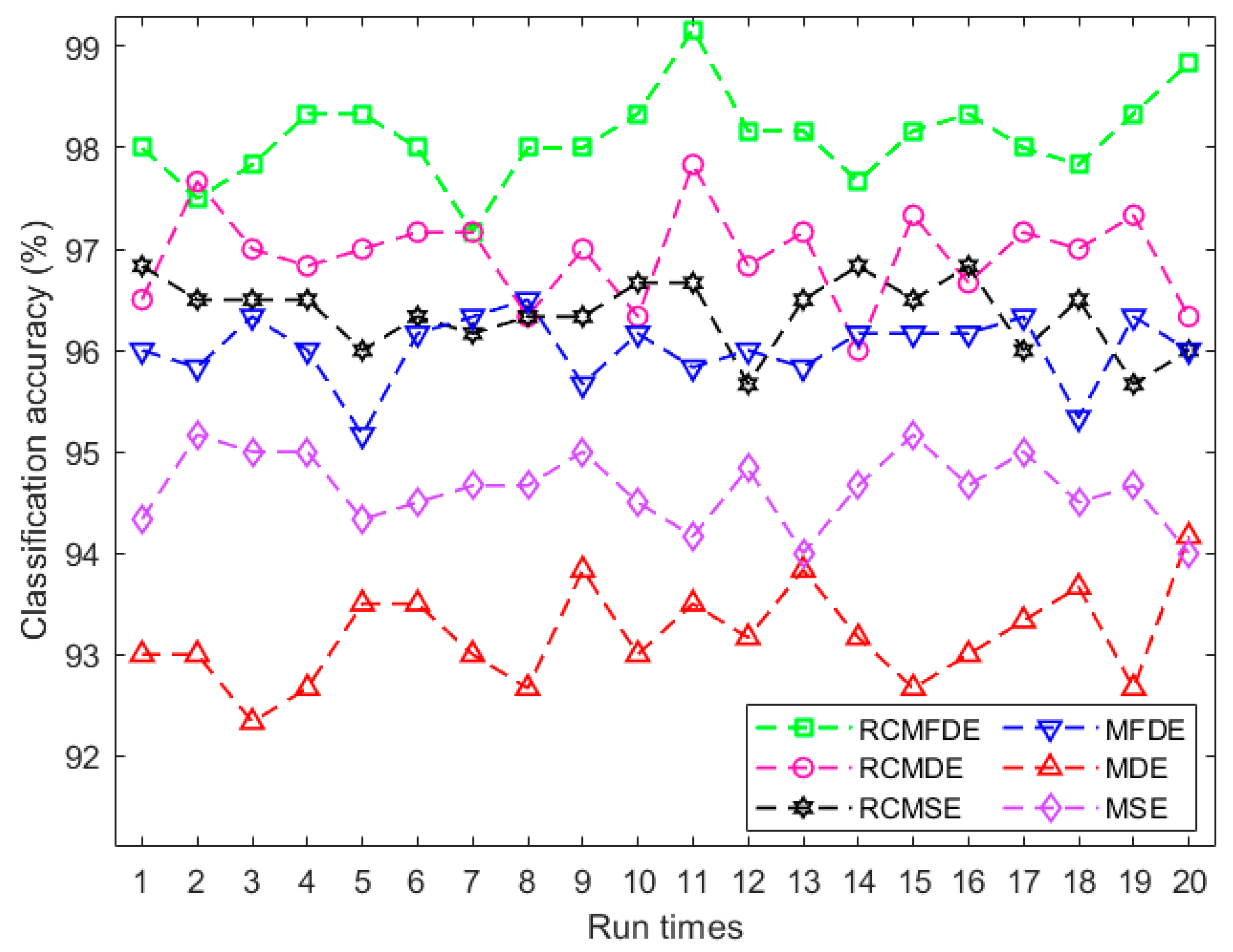
The classification approach was repeated twenty times. The results are presented in Figure 14 and Table 6, indicating the higher average classification accuracy of features resulting from RCMFDE and MFDE compared to RCMDE and MDE, respectively. This suggests that MFDE and RCMFDE are more appropriate than MDE and RCMDE for pattern detection in bearing fault conditions. The highest average classification accuracy is 98.11%, obtained for features extracted by RCMFDE. This fact indicates that RCMFDE is the most suitable feature extraction method. Details of fault classification with the highest accuracy conducted by RCMFDE are presented in Table 7.
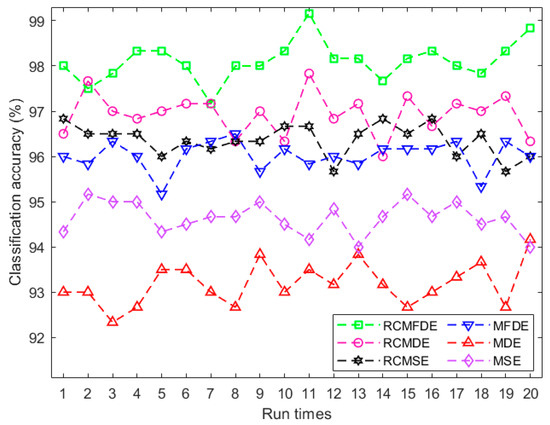
Figure 14.
Classification of bearing fault conditions for MDE, RCMDE, MFDE, and RCMFDE using multiclass FCM-ANFIS.
Table 6.
Classification results of bearing fault conditions: H, STO, DO, and PO conditions.
Table 7.
Confusion matrix of results with the highest classification accuracy using RCMFDE.
4.8.2. Fault Diagnosis on PHMAP 2021 Data Challenge Dataset
In this section, we utilized three fault conditions from the PHMAP 2021 Data Challenge Dataset, as outlined in Section 2.2. For each of these conditions, we extracted three hundred independent signal samples, each consisting of 1024 data points.
We employed various multiscale entropy-based techniques, specifically MSE (m = 2, r = 0.15 × SD of original signal), RCMSE (m = 2, r = 0.15 × SD of original signal), MDE, RCMDE, MFDE, and RCMFDE, to analyze all signals across 20 different scales. The resulting values from these methods were employed as features for the purpose of fault diagnosis.
For the classification process, we utilized the multiclass FCM-ANFIS classifier [31]. Since we examined three distinct fault conditions, the target binary vector length was set to 3. The classifier was constructed using three FCM-ANFIS models. For each specific condition, we allocated 120 samples for training, 30 samples for validation, and 150 samples for testing. These data were classified 20 times using multiclass FCM-ANFIS.
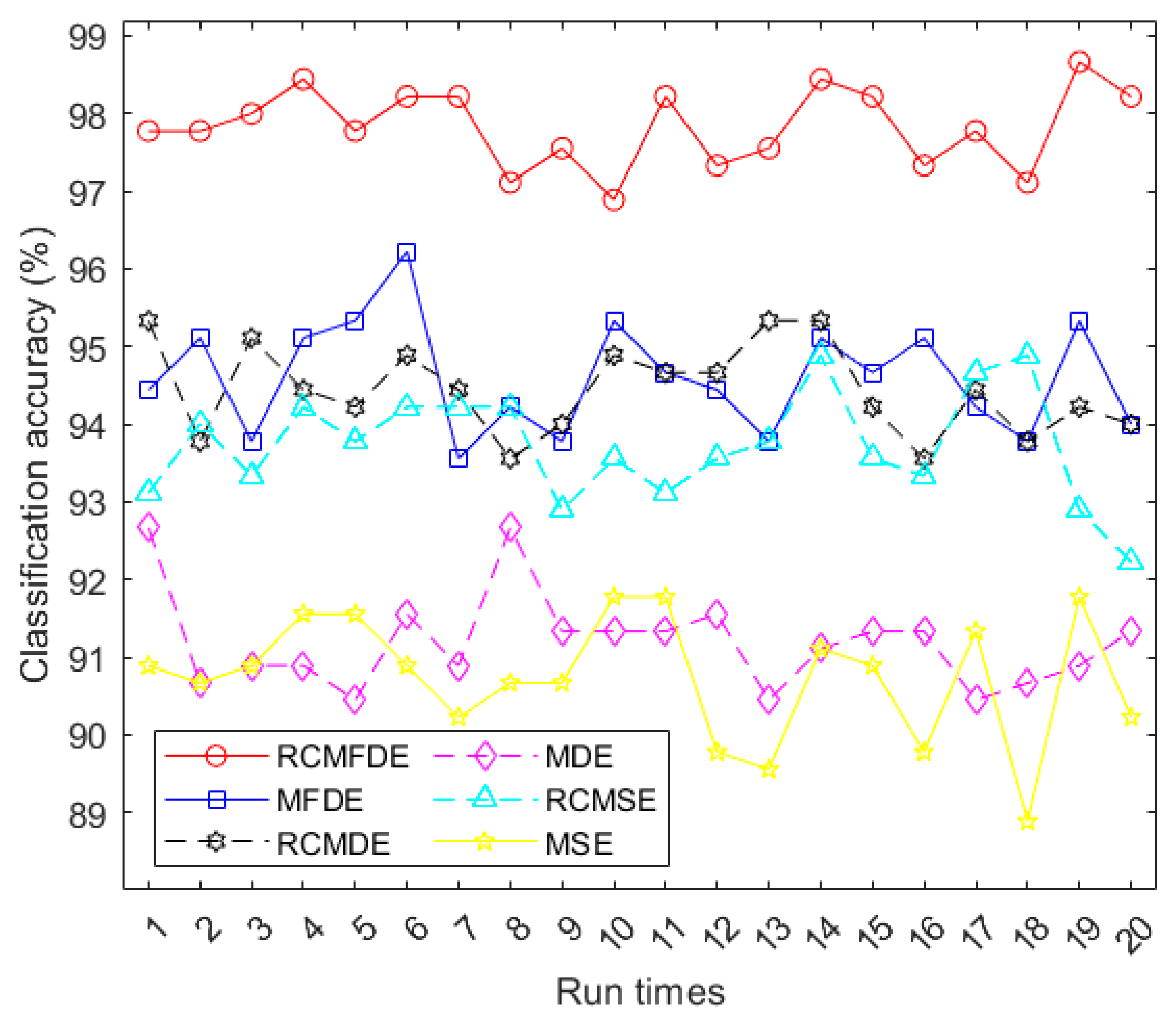
The accuracies of this classification process are visualized in Figure 15 and summarized in Table 8. The results demonstrate the superior performance of RCMFDE when compared to other multiscale entropy algorithms in extracting relevant bearing features. Detailed information about the fault classification with the highest accuracy achieved using RCMFDE is presented in Table 9.
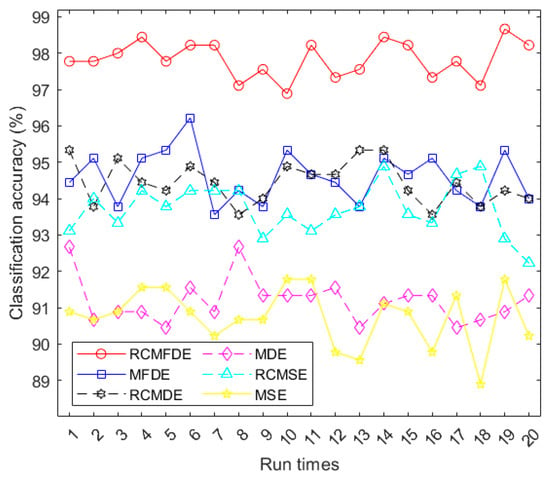
Figure 15.
Accuracies of classifying the three fault conditions using multiclass FCM-ANFIS with different inputs.
Table 8.
Classification results for different fault conditions (high looseness of the V-belt, faulty bearing, and fault-free condition) using multiclass FCM-ANFIS with different inputs.
Table 9.
Confusion matrix of results with the highest classification accuracy using RCMFDE.
4.8.3. Fault Diagnosis on the Case Western Reserve University (CWRU) Bearing Dataset
All 16 fault conditions from the CWRU bearing dataset were used when the sampling frequency was 12,000 Hz. The examined fault conditions are demonstrated in Table 10. For each of these conditions, we extracted 220 independent signal samples, each consisting of 2048 data points. In each condition, the motor shaft rotated at 1730, 1750, 1772, and 1797 rpm speeds.
Table 10.
Description of the bearing dataset.
Multiclass FCM-ANFIS was also used as the classifier for this dataset. Since 16 fault conditions were examined in this section, the target binary vector length was assumed to be 16, and the classifier is made from 16 FCM-ANFIS. The training dataset consisted of 80 signals, the validation dataset consisted of 20 signals, and the testing dataset consisted of 120 signals for each bearing fault condition.
MSE (m = 2, r = 0.15×SD of original signal), RCMSE (m = 2, r = 0.15×SD of original signal), MDE, RCMDE, MFDE, and RCMFDE were calculated for all signals, and the values of these methods were employed as features for the fault diagnosis.
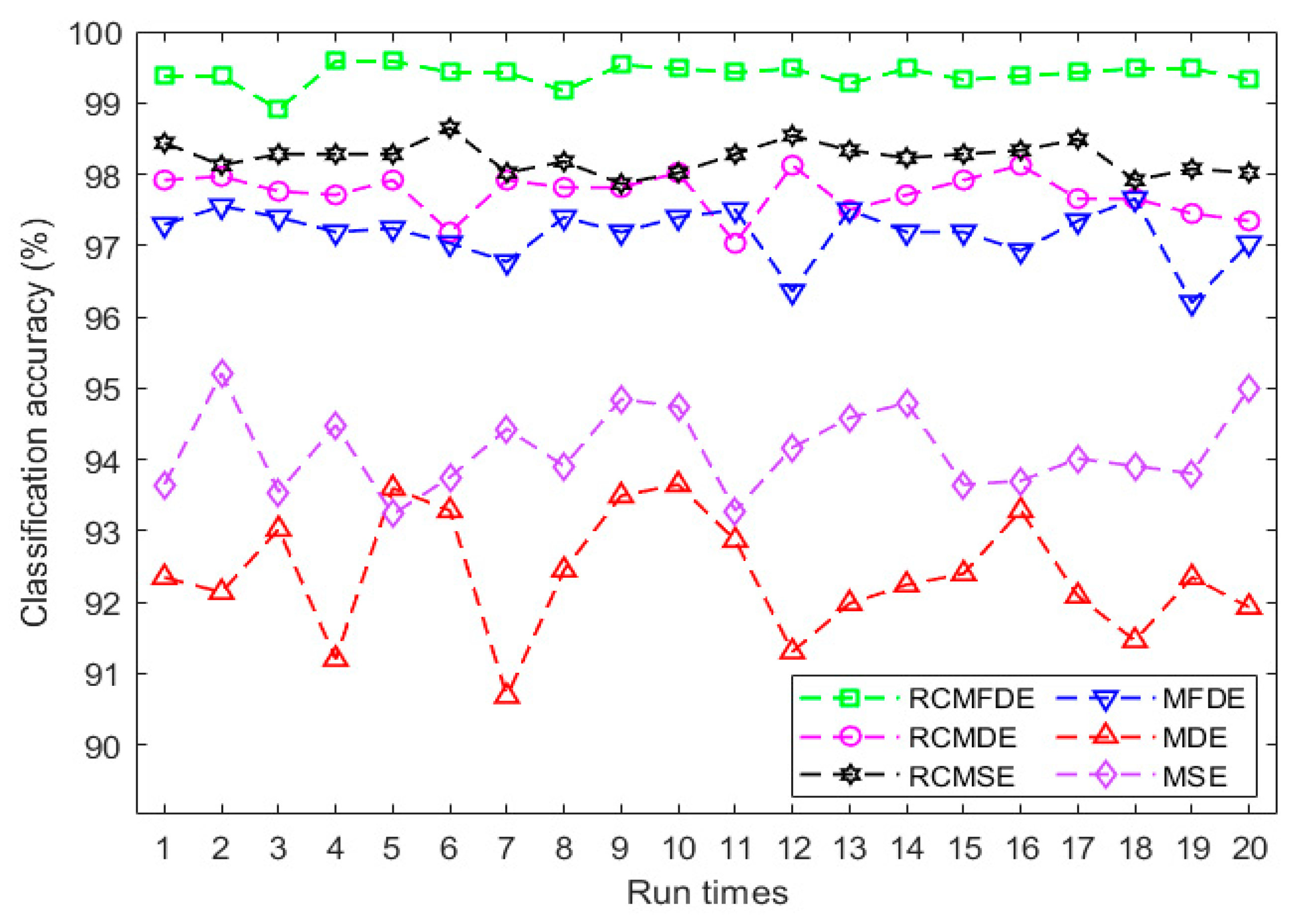
These data were classified by multiclass FCM-ANFIS. The results are presented in Figure 16 and Table 11, indicating the higher average classification accuracy based on RCMFDE. It suggests that RCMFDE is more appropriate than the other existing multiscale entropy algorithms for extracting bearing features. The details of fault classification with the highest accuracy using RCMFDE are presented in Table 12.
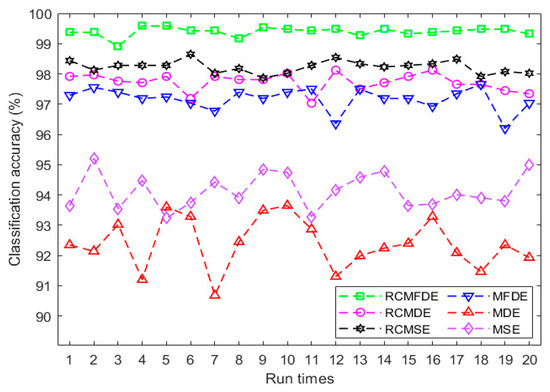
Figure 16.
The classification results of bearing fault diagnosis using multiclass FCM-ANFIS with various inputs.
Table 11.
Classification of different bearing fault conditions.
Table 12.
Confusion matrix of results with the highest classification accuracy using RCMFDE.
Considering the satisfactory results achieved with real and synthetic signals, the proposed method can find practical industrial applications. However, in future research endeavors, RCMFDE can be employed to utilize the processed data via other signal processing methods, such as wavelet, VMD, etc., further enhancing its fault detection capabilities in industrial applications.
5. Conclusions
This paper introduced RCMFDE as a measure of signal complexity and recommended using it when extracting the features of bearing vibration signals. RCMFDE, compared with MDE, MFDE, and RCMDE, calculated signal complexity with more reliability and stability, which was confirmed using different synthetic and real datasets. Although the behavior of (RC)MFDE was similar to (RC)MDE for white and pink noise, the former led to lower SDs and consequently was more stable than the latter. In simulated bearing signals, the results of RCMFDE indicated a significant difference between faulty and healthy conditions over the majority of scales. Additionally, (RC)MFDE resulted in higher resistance against noise than (RC)MDE. In fault diagnosis by three empirical datasets, features obtained from RCMFDE resulted in higher classification accuracy than MSE, RCMSE, MDE, RCMDE, and MFDE. Overall, these findings suggest the superiority of RCMFDE over the conventional multiscale entropy methods in bearing feature extraction.
Author Contributions
Conceptualization, M.R.A.; Methodology, H.A.; Software, M.R.; Investigation, M.M.K.; Writing—original draft, M.R.; Writing—review & editing, H.A.; Visualization, M.R.; Supervision, M.M.K.; Project administration, M.R.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
The data that use in this study are openly available in CWRU datasets at https://engineering.case.edu/bearingdatacenter, PHMAP 2021 datasets at http://phmap.org/data-challenge, and KAt datasets at https://mb.uni-paderborn.de/kat/forschung/datacenter/bearing-datacenter/.
Acknowledgments
We express our profound gratitude to the anonymous reviewers whose insightful comments have contributed to the enhancement of our work’s quality.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| CG | Coarse graining |
| CMSE | Composite multiscale sample entropy |
| CWRU | Case Western Reserve University |
| DE | Dispersion entropy |
| DO | Drilling on the outer ring |
| FDE | Fuzzy dispersion entropy |
| FCM-ANFIS | Adaptive neuro-fuzzy inference system with fuzzy c-means |
| FE | Fuzzy entropy |
| H | Healthy condition |
| M. | Multiscale |
| MDE | Multiscale dispersion entropy |
| MFDE | Multiscale fuzzy dispersion entropy |
| MPE | Multiscale permutation entropy |
| MSE | Multiscale sample entropy |
| PE | Permutation entropy |
| PHMAP 2021 | Asia Pacific Conference of the Prognostics and Health Management Society 2021 |
| PO | Pitting on the outer ring |
| RC | Refined composite |
| RCMDE | Refined composite multiscale dispersion entropy |
| RCMFDE | Refined composite multiscale fuzzy dispersion entropy |
| RCMFE | Refined composite multiscale fuzzy entropy |
| RCMPE | Refined composite multiscale permutation entropy |
| RCMSE | Refined composite multiscale sample entropy |
| SE | Sample entropy |
| SD | Standard deviation |
| SNR | Signal-to-noise ratio |
| STO | Sharp trench on the outer ring |
| VMD | Variational mode decomposition |
| WGN | White Gaussian noise |
References
- Yan, X.; Jia, M. Intelligent Fault Diagnosis of Rotating Machinery Using Improved Multiscale Dispersion Entropy and MRMR Feature Selection. Knowl. Based Syst. 2019, 163, 450–471. [Google Scholar] [CrossRef]
- Zhang, L.; Xiong, G.; Liu, H.; Zou, H.; Guo, W. Bearing Fault Diagnosis Using Multi-Scale Entropy and Adaptive Neuro-Fuzzy Inference. Expert Syst. Appl. 2010, 37, 6077–6085. [Google Scholar] [CrossRef]
- Wu, S.-D.; Wu, C.-W.; Wu, T.-Y.; Wang, C.-C. Multi-Scale Analysis Based Ball Bearing Defect Diagnostics Using Mahalanobis Distance and Support Vector Machine. Entropy 2013, 15, 416–433. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Heng, A.; Zhang, S.; Tan, A.C.C.; Mathew, J. Rotating Machinery Prognostics: State of the Art, Challenges and Opportunities. Mech. Syst. Signal Process. 2009, 23, 724–739. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A Review on Empirical Mode Decomposition in Fault Diagnosis of Rotating Machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Rostaghi, M.; Reza, M.; Azami, H. Application of Dispersion Entropy to Status Characterization of Rotary Machines. J. Sound Vib. 2019, 438, 291–308. [Google Scholar] [CrossRef]
- Rostaghi, M.; Khatibi, M.M.; Ashory, M.R.; Azami, H. Bearing Fault Diagnosis Using Refined Composite Generalized Multiscale Dispersion Entropy-Based Skewness and Variance and Multiclass FCM-ANFIS. Entropy 2021, 23, 1510. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, Z.; Lu, C. Self-Adaptive Bearing Fault Diagnosis Based on Permutation Entropy and Manifold-Based Dynamic Time Warping. Mech. Syst. Signal Process. 2019, 114, 658–673. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Liu, Z.; Liang, X.; Si, S.; Member, S. The Entropy Algorithm and Its Variants in the Fault Diagnosis of Rotating Machinery: A Review. IEEE Access 2018, 6, 66723–66741. [Google Scholar] [CrossRef]
- Singh, A.; Kankar, P.K.; Kumar, N.; Singh, S. Bearing Fault Detection and Recognition Methodology Based on Weighted Multiscale Entropy Approach. Mech. Syst. Signal Process. 2021, 147, 107073. [Google Scholar] [CrossRef]
- Kim, S.; An, D.; Choi, J.-H. Diagnostics 101: A Tutorial for Fault Diagnostics of Rolling Element Bearing Using Envelope Analysis in MATLAB. Appl. Sci. 2020, 10, 7302. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Wei, Y.; Huang, W. A New Rolling Bearing Fault Diagnosis Method Based on Multiscale Permutation Entropy and Improved Support Vector Machine Based Binary Tree. Measurement 2016, 77, 80–94. [Google Scholar] [CrossRef]
- Wang, Q.; Xiao, Y.; Wang, S.; Liu, W.; Liu, X. A Method for Constructing Automatic Rolling Bearing Fault Identification Model Based on Refined Composite Multi-Scale Dispersion Entropy. IEEE Access 2021, 9, 86412–86428. [Google Scholar] [CrossRef]
- Zheng, J.; Pan, H.; Cheng, J. Rolling Bearing Fault Detection and Diagnosis Based on Composite Multiscale Fuzzy Entropy and Ensemble Support Vector Machines. Mech. Syst. Signal Process. 2017, 85, 746–759. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A Measure for Time-Series Analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological Time-Series Analysis Using Approximate Entropy and Sample Entropy. Am. J. Physiol. Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Amplitude- and Fluctuation-Based Dispersion Entropy. Entropy 2018, 20, 210. [Google Scholar] [CrossRef]
- Rostaghi, M.; Khatibi, M.M.; Ashory, M.R.; Azami, H. Fuzzy Dispersion Entropy: A Nonlinear Measure for Signal Analysis. IEEE Trans. Fuzzy Syst. 2021, 30, 3785–3796. [Google Scholar] [CrossRef]
- Ni, Q.; Feng, K.; Wang, K.; Yang, B.; Wang, Y. A Case Study of Sample Entropy Analysis to the Fault Detection of Bearing in Wind Turbine. Case Stud. Eng. Fail. Anal. 2017, 9, 99–111. [Google Scholar] [CrossRef]
- Alcaraz, R.; Abásolo, D.; Hornero, R.; Rieta, J.J. Optimal Parameters Study for Sample Entropy-Based Atrial Fibrillation Organization Analysis. Comput. Methods Programs Biomed. 2010, 99, 124–132. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.-K.; Liang, J.-C. Application of Multi-Scale (Cross-) Sample Entropy for Structural Health Monitoring. Smart Mater. Struct. 2015, 24, 85003. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Z.; Xie, H.; Yu, W. Characterization of Surface EMG Signal Based on Fuzzy Entropy. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 266–272. [Google Scholar] [CrossRef] [PubMed]
- Noman, K.; Li, Y.; Wen, G.; Patwari, A.U.; Wang, S. Continuous Monitoring of Rolling Element Bearing Health by Nonlinear Weighted Squared Envelope-Based Fuzzy Entropy. Struct. Health Monit. 2023, 14759217231163090. [Google Scholar] [CrossRef]
- Azami, H.; Li, P.; Arnold, S.E.; Escudero, J.; Humeau-Heurtier, A. Fuzzy Entropy Metrics for the Analysis of Biomedical Signals: Assessment and Comparison. IEEE Access 2019, 7, 104833–104847. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation Entropy: A Natural Complexity Measure for Time Series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Zanin, M.; Zunino, L.; Rosso, O.A.; Papo, D. Permutation Entropy and Its Main Biomedical and Econophysics Applications: A Review. Entropy 2012, 14, 1553–1577. [Google Scholar] [CrossRef]
- Vashishtha, G.; Chauhan, S.; Singh, M.; Kumar, R. Bearing Defect Identification by Swarm Decomposition Considering Permutation Entropy Measure and Opposition-Based Slime Mould Algorithm. Measurement 2021, 178, 109389. [Google Scholar] [CrossRef]
- Şeker, M.; Özbek, Y.; Yener, G.; Özerdem, M.S. Complexity of EEG Dynamics for Early Diagnosis of Alzheimer’s Disease Using Permutation Entropy Neuromarker. Comput. Methods Programs Biomed. 2021, 206, 106116. [Google Scholar] [CrossRef]
- Zunino, L.; Zanin, M.; Tabak, B.M.; Pérez, D.G.; Rosso, O.A. Forbidden Patterns, Permutation Entropy and Stock Market Inefficiency. Phys. A Stat. Mech. Its Appl. 2009, 388, 2854–2864. [Google Scholar] [CrossRef]
- Consolini, G.; De Michelis, P. Permutation Entropy Analysis of Complex Magnetospheric Dynamics. J. Atmos. Solar-Terr. Phys. 2014, 115, 25–31. [Google Scholar] [CrossRef]
- Kang, Y.; Cai, H.; Song, S. Study and Application of Complexity Model for Hydrological System. Shuili Fadian Xuebao (J. Hydroelectr. Eng.) 2013, 32, 5–10. [Google Scholar]
- Azami, H.; Rostaghi, M.; Abásolo, D.; Escudero, J. Refined Composite Multiscale Dispersion Entropy and Its Application to Biomedical Signals. IEEE Trans. Biomed. Eng. 2017, 64, 2872–2879. [Google Scholar] [PubMed]
- Azami, H.; Rostaghi, M.; Fernandez, A.; Escudero, J. Dispersion Entropy for the Analysis of Resting-State MEG Regularity in Alzheimer’s Disease. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 6417–6420. [Google Scholar] [CrossRef]
- Li, S.; Shang, P. Characterizing Nonlinear Time Series via Sliding-Window Amplitude-Based Dispersion Entropy. Fluct. Noise Lett. 2023, 22, 2350023. [Google Scholar] [CrossRef]
- Costa, M.; Goldberger, A.L.; Peng, C.-K. Multiscale Entropy Analysis of Complex Physiologic Time Series. Phys. Rev. Lett. 2002, 89, 68102. [Google Scholar] [CrossRef]
- Aziz, W.; Arif, M. Multiscale Permutation Entropy of Physiological Time Series. In Proceedings of the 2005 Pakistan Section Multitopic Conference, Karachi, Pakistan, 24–25 December 2005. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y.; Luo, S. A Rolling Bearing Fault Diagnosis Method Based on Multi-Scale Fuzzy Entropy and Variable Predictive Model-Based Class Discrimination. Mech. Mach. Theory 2014, 78, 187–200. [Google Scholar] [CrossRef]
- Wu, S.; Wu, C.; Lee, K.; Lin, S. Modified Multiscale Entropy for Short-Term Time Series Analysis. Phys. A 2013, 392, 5865–5873. [Google Scholar] [CrossRef]
- Wu, S.-D.; Wu, C.-W.; Lin, S.-G.; Wang, C.-C.; Lee, K.-Y. Time Series Analysis Using Composite Multiscale Entropy. Entropy 2013, 15, 1069–1084. [Google Scholar] [CrossRef]
- Wu, S.; Wu, C.; Lin, S.; Lee, K.; Peng, C. Analysis of Complex Time Series Using Refined Composite Multiscale Entropy. Phys. Lett. A 2014, 378, 1369–1374. [Google Scholar] [CrossRef]
- Azami, H.; Fernández, A.; Escudero, J. Refined Multiscale Fuzzy Entropy Based on Standard Deviation for Biomedical Signal Analysis. Med. Biol. Eng. Comput. 2017, 55, 2037–2052. [Google Scholar] [CrossRef]
- Humeau-Heurtier, A.; Wu, C.-W.; Wu, S.-D. Refined Composite Multiscale Permutation Entropy to Overcome Multiscale Permutation Entropy Length Dependence. IEEE Signal Process. Lett. 2015, 22, 2364–2367. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, L.; Wang, J.; Du, W. Research on Novel Bearing Fault Diagnosis Method Based on Improved Krill Herd Algorithm and Kernel Extreme Learning Machine. Complexity 2019, 2019, 4031795. [Google Scholar] [CrossRef]
- Li, C.; Zheng, J.; Pan, H.; Liu, Q. Fault Diagnosis Method of Rolling Bearings Based on Refined Composite Multiscale Dispersion Entropy and Support Vector Machine. China Mech. Eng. 2019, 30, 1713. [Google Scholar]
- Zhang, X.; Zhao, J.; Teng, H.; Liu, G. A Novel Faults Detection Method for Rolling Bearing Based on RCMDE and ISVM. J. Vibroengineering 2019, 21, 2148–2158. [Google Scholar] [CrossRef]
- Luo, H.; He, C.; Zhou, J.; Zhang, L. Rolling Bearing Sub-Health Recognition via Extreme Learning Machine Based on Deep Belief Network Optimized by Improved Fireworks. IEEE Access 2021, 9, 42013–42026. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, J. A Comprehensive Fault Diagnosis Method for Rolling Bearings Based on Refined Composite Multiscale Dispersion Entropy and Fast Ensemble Empirical Mode Decomposition. Entropy 2019, 21, 680. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Yang, W.; Luo, Y. Fault Diagnosis of a Rolling Bearing Based on Adaptive Sparest Narrow-Band Decomposition and Refined Composite Multiscale Dispersion Entropy. Entropy 2020, 22, 375. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Huang, S.; Pan, H.; Jiang, K. An Improved Empirical Wavelet Transform and Refined Composite Multiscale Dispersion Entropy-Based Fault Diagnosis Method for Rolling Bearing. IEEE Access 2020, 8, 168732–168742. [Google Scholar] [CrossRef]
- Cai, J.; Yang, L.; Zeng, C.; Chen, Y. Integrated Approach for Ball Mill Load Forecasting Based on Improved EWT, Refined Composite Multi-Scale Dispersion Entropy and Fireworks Algorithm Optimized SVM. Adv. Mech. Eng. 2021, 13, 1687814021991264. [Google Scholar] [CrossRef]
- Lv, J.; Sun, W.; Wang, H.; Zhang, F. Coordinated Approach Fusing RCMDE and Sparrow Search Algorithm-Based SVM for Fault Diagnosis of Rolling Bearings. Sensors 2021, 21, 5297. [Google Scholar] [CrossRef]
- Baranwal, G.; Vidyarthi, D.P. Admission Control in Cloud Computing Using Game Theory. J. Supercomput. 2016, 72, 317–346. [Google Scholar] [CrossRef]
- Data Challenge at PHMAP 2021. Available online: http://phmap.org/data-challenge/ (accessed on 18 June 2021).
- Duch, W. Uncertainty of Data, Fuzzy Membership Functions, and Multilayer Perceptrons. IEEE Trans. Neural Netw. 2005, 16, 10–23. [Google Scholar] [CrossRef] [PubMed]
- Costa, M.; Goldberger, A.L.; Peng, C.K. Multiscale Entropy Analysis of Biological Signals. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2005, 71, 021906. [Google Scholar] [CrossRef] [PubMed]
- Azami, H.; Arnold, S.E.; Sanei, S.; Chang, Z.; Sapiro, G.; Escudero, J.; Gupta, A.S. Multiscale Fluctuation-Based Dispersion Entropy and Its Applications to Neurological Diseases. IEEE Access 2019, 7, 68718–68733. [Google Scholar] [CrossRef]
- Humeau-Heurtier, A.; Wu, C.-W.; Wu, S.-D.; Mahé, G.; Abraham, P. Refined Multiscale Hilbert–Huang Spectral Entropy and Its Application to Central and Peripheral Cardiovascular Data. IEEE Trans. Biomed. Eng. 2016, 63, 2405–2415. [Google Scholar] [CrossRef] [PubMed]
- Tahmina Akter, M. Observation of Different Behaviors of Logistic Map for Different Control Parameters. Int. J. Appl. Math. Theor. Phys. 2018, 4, 84. [Google Scholar] [CrossRef]
- Wu, S.D.; Wu, C.W.; Humeau-Heurtier, A. Refined Scale-Dependent Permutation Entropy to Analyze Systems Complexity. Phys. A Stat. Mech. Its Appl. 2016, 450, 454–461. [Google Scholar] [CrossRef]
- Yan, R.; Liu, Y.; Gao, R.X. Permutation Entropy: A Nonlinear Statistical Measure for Status Characterization of Rotary Machines. Mech. Syst. Signal Process. 2012, 29, 474–484. [Google Scholar] [CrossRef]
- Rani, M.; Agarwal, R. A New Experimental Approach to Study the Stability of Logistic Map. Chaos Solitons Fractals 2009, 41, 2062–2066. [Google Scholar] [CrossRef]
- Traversaro, F.; Legnani, W.; Redelico, F.O. Influence of the Signal to Noise Ratio for the Estimation of Permutation Entropy. Phys. A 2020, 553, 124134. [Google Scholar] [CrossRef]
- Tian, X.; Xi, J.; Rehab, I.; Abdalla, G.M.; Gu, F.; Ball, A.D. A Robust Detector for Rolling Element Bearing Condition Monitoring Based on the Modulation Signal Bispectrum and Its Performance Evaluation against the Kurtogram. Mech. Syst. Signal Process. 2018, 100, 167–187. [Google Scholar] [CrossRef]
- Zhao, Z.; Qiao, B.; Wang, S.; Shen, Z.; Chen, X. A Weighted Multi-Scale Dictionary Learning Model and Its Applications on Bearing Fault Diagnosis. J. Sound Vib. 2019, 446, 429–452. [Google Scholar] [CrossRef]
- Kedadouche, M.; Liu, Z.; Vu, V.-H. A New Approach Based on OMA-Empirical Wavelet Transforms for Bearing Fault Diagnosis. Measurement 2016, 90, 292–308. [Google Scholar] [CrossRef]
- Lessmeier, C.; Kimotho, J.K.; Zimmer, D.; Sextro, W.; KAt-Data Center, Chair of Design and Drive Technology. Paderborn University. Available online: https://mb.uni-paderborn.de/kat/forschung/datacenter/bearing-datacenter/ (accessed on 14 January 2021).
- Lessmeier, C.; Kimotho, J.K.; Zimmer, D.; Sextro, W. Condition Monitoring of Bearing Damage in Electromechanical Drive Systems by Using Motor Current Signals of Electric Motors: A Benchmark Data Set for Data-Driven Classification. In Proceedings of the PHM Society European Conference, Bilbao, Spain, 5–8 July 2016; Volume 3. [Google Scholar]
- Bearings Vibration Data Set. Case Western Reserve University. Available online: https://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 23 June 2020).
- Smith, W.A.; Randall, R.B. Rolling Element Bearing Diagnostics Using the Case Western Reserve University Data: A Benchmark Study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Fogedby, H.C. On the Phase Space Approach to Complexity. J. Stat. Phys. 1992, 69, 411–425. [Google Scholar] [CrossRef]
- Jiang, Y.; Mao, D.; Xu, Y. A Fast Algorithm for Computing Sample Entropy. Adv. Adapt. Data Anal. 2011, 3, 167–186. [Google Scholar] [CrossRef]
- Sheen, Y.T. A Complex Filter for Vibration Signal Demodulation in Bearing Defect Diagnosis. J. Sound Vib. 2004, 276, 105–119. [Google Scholar] [CrossRef]
- Rosenthal, R. Parametric Measures of Effect Size in The Handbook of Research Synthesis; Cooper, H., Hedges, L.V., Eds.; Sage: New York, NY, USA, 1994; pp. 231–244. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).