



Hamming Distance Optimized Underwater Acoustic OTFS-IM Systems


Abstract
:1. Introduction
2. OTFS-IM for Underwater Acoustic Communication System
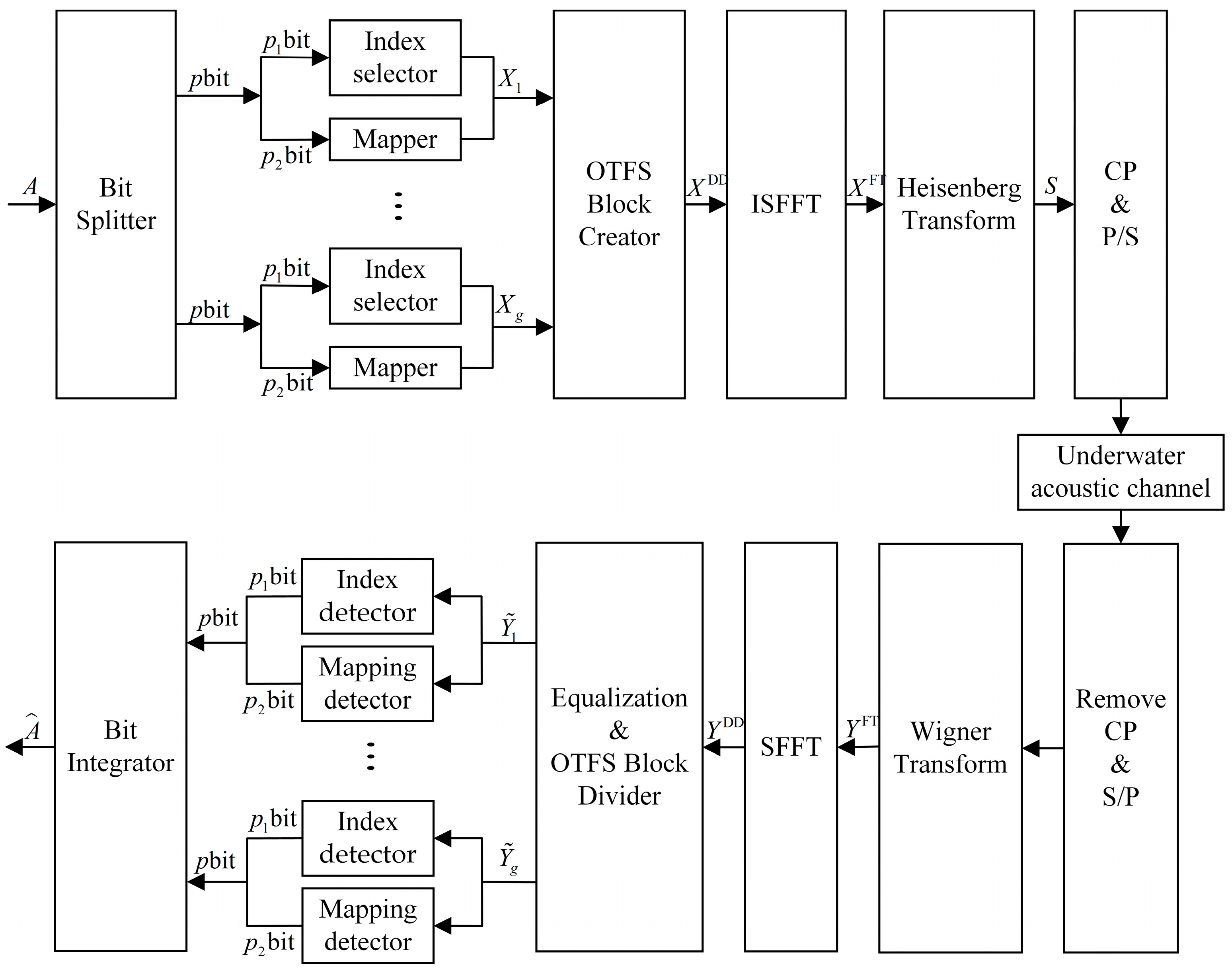
2.1. System Model
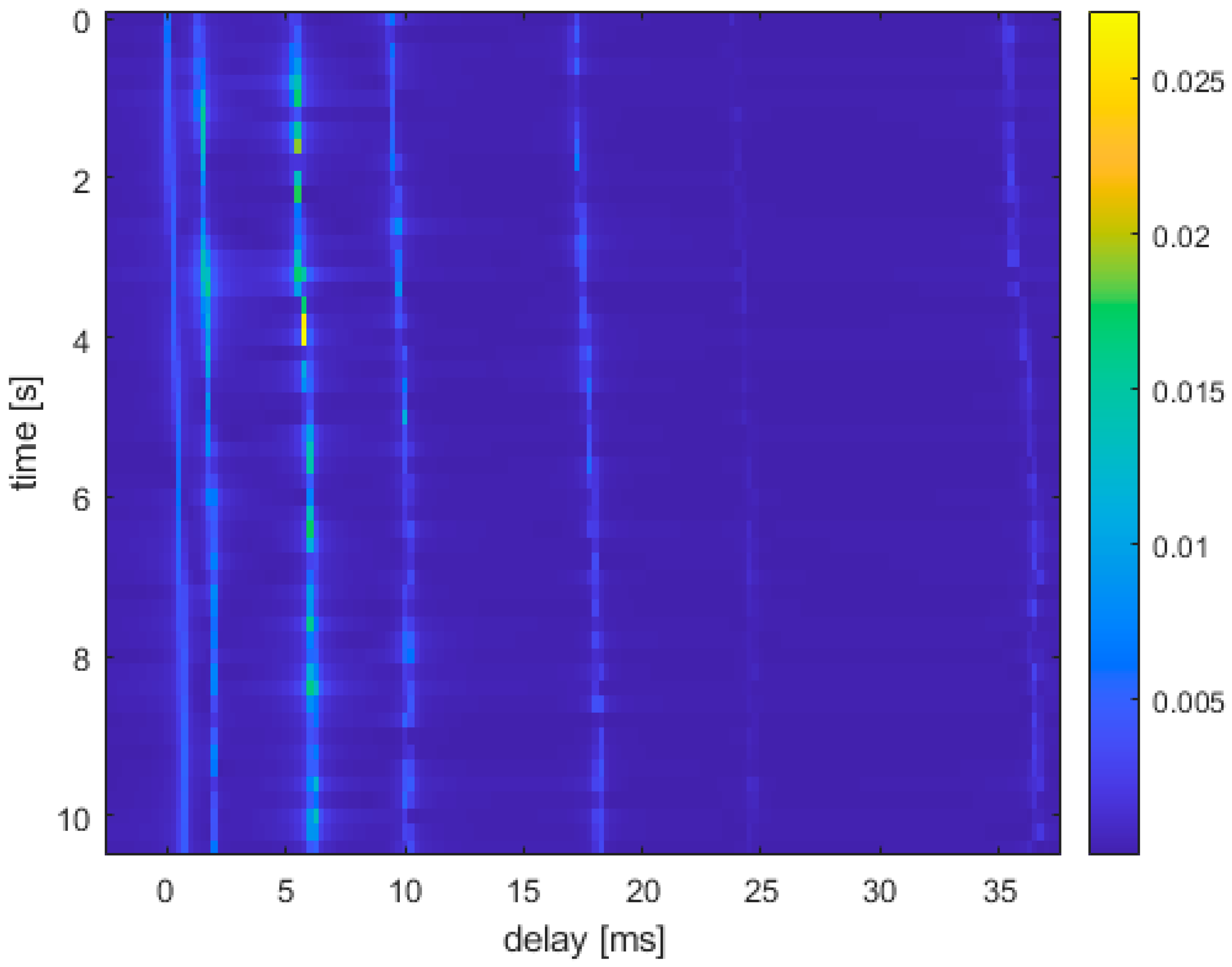
2.2. Underwater Acoustic Channel
2.3. Detection Algorithm
2.3.1. ML Detection Algorithms
2.3.2. GD Detection Algorithm
3. Hamming Distance Optimized Index Mapping Model
3.1. Index Mapping Method
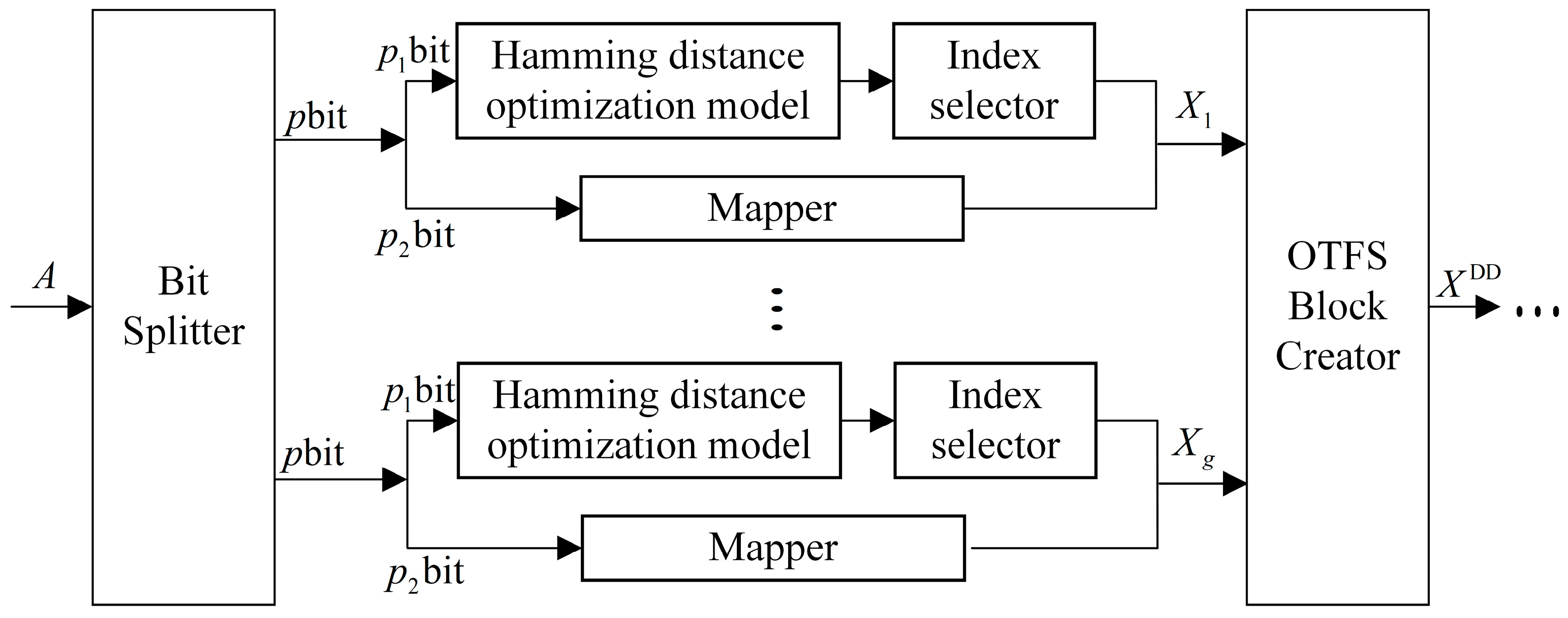
3.2. Hamming Distance Optimization Model
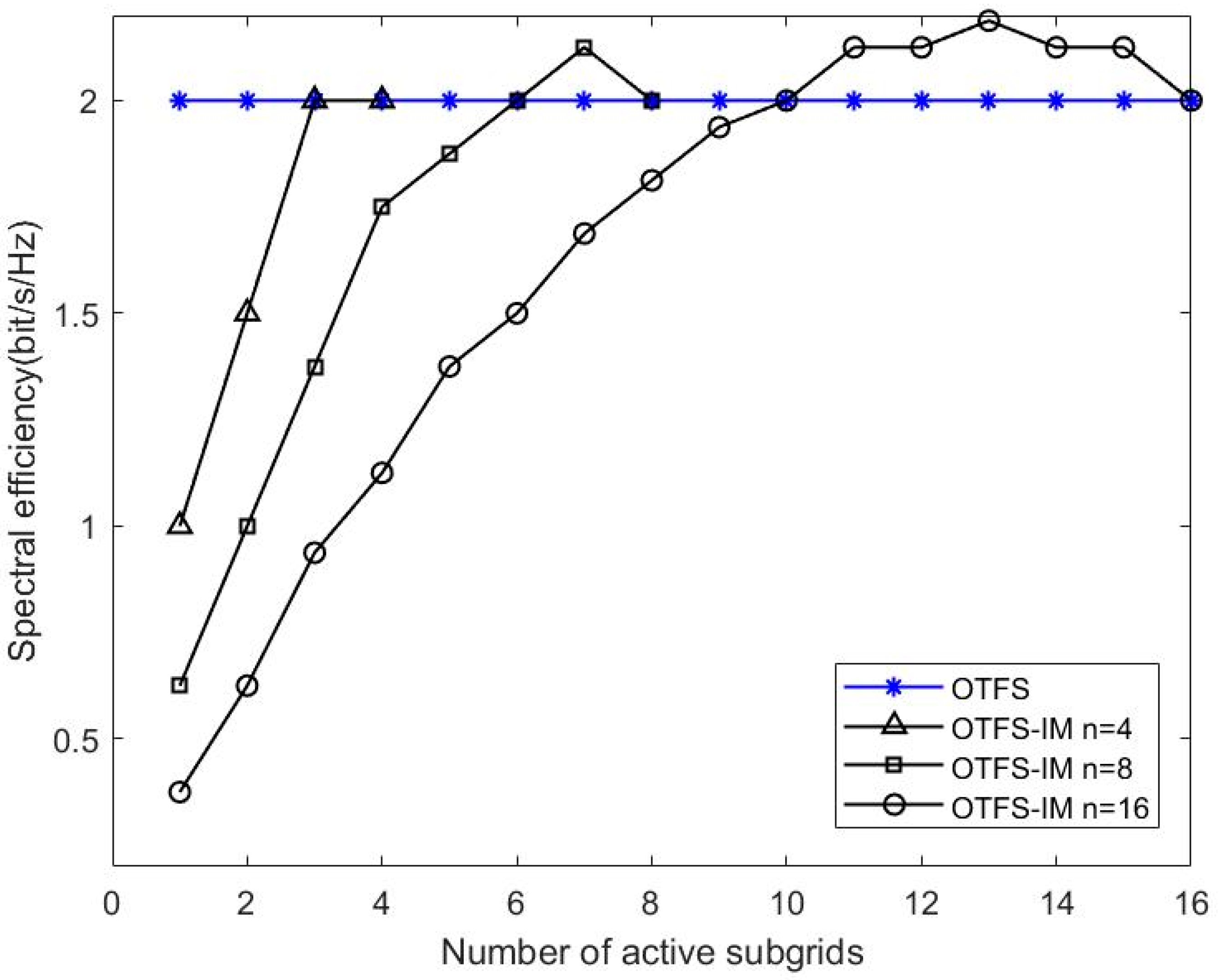
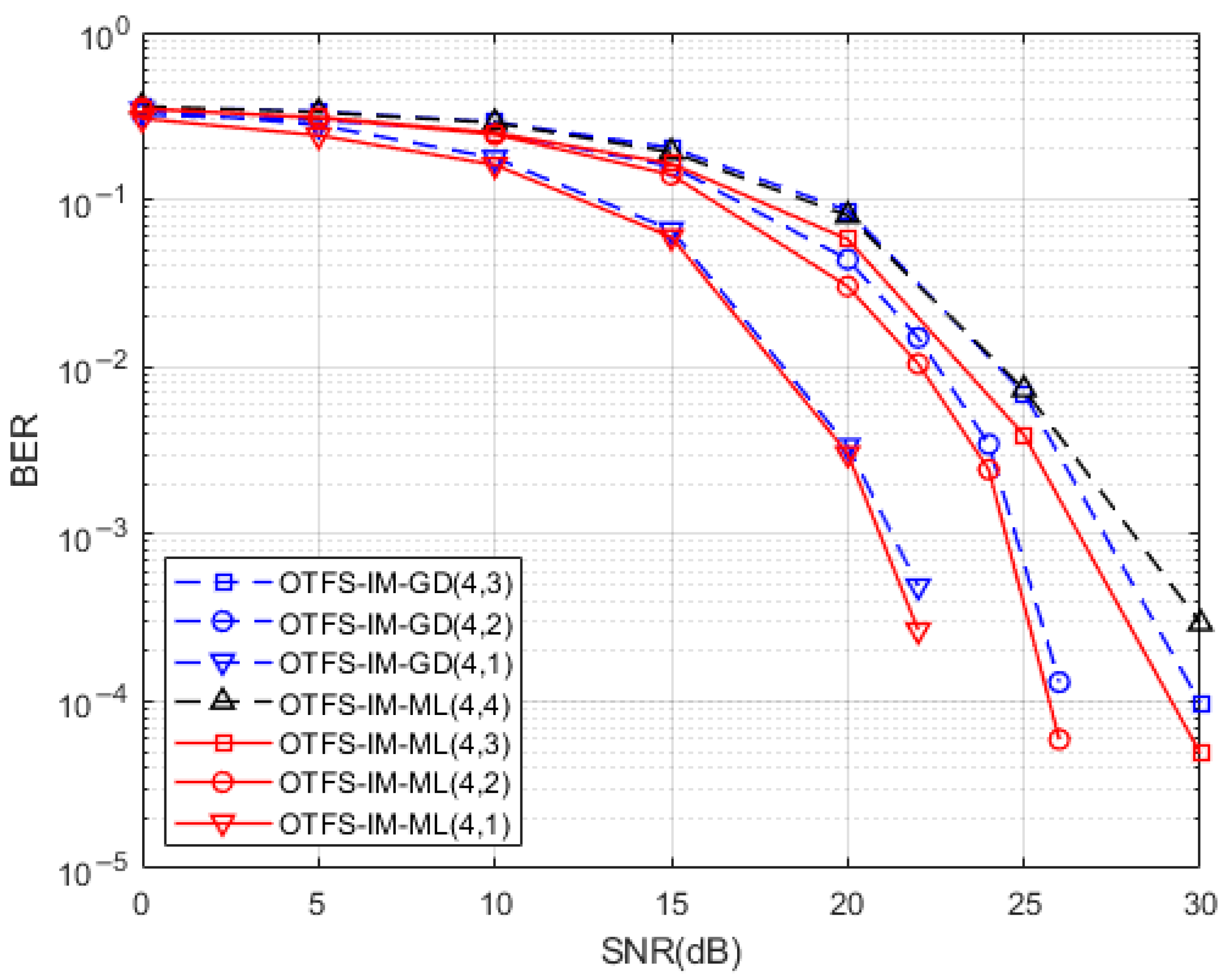
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.; Huang, M.; Cheng, S.; Tan, Q.; Feng, H. Spatial diversity and combination technology using amplitude and phase weighting method for phase-coherent underwater acoustic communications. Chin. J. Acoust. 2018, 42, 685–693. [Google Scholar]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L.; Willett, P. Multicarrier communication over underwater acoustic channels with nonuniform Doppler shifts. IEEE J. Ocean. Eng. 2008, 33, 198–209. [Google Scholar]
- Stojanovic, M. Low complexity OFDM detector for underwater acoustic channels. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Amini, P.; Chen, R.R.; Farhang-Boroujeny, B. Filterbank multicarrier communications for underwater acoustic channels. IEEE J. Ocean. Eng. 2015, 40, 115–130. [Google Scholar] [CrossRef]
- Fang, T.; Dai, Y. Method of time reversal filter bank multicarrier underwater acoustic communication. Acta Acust. 2020, 45, 38–44. [Google Scholar] [CrossRef]
- Hadani, R.; Rakib, S.; Tsatsanis, M.; Monk, A.; Goldsmith, A.J.; Molisch, A.F.; Calderbank, R. Orthogonal Time Frequency Space Modulation. In Proceedings of the IEEE Wireless Communications & Networking Conference, San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Mishra, S.; Simeone, O.; Erkip, E. Channel estimation and equalization for orthogonal time frequency space modulation. IEEE Trans. Wirel. Commun. 2018, 17, 3145–3160. [Google Scholar]
- Li, S.; Yuan, J.; Yuan, W.; Wei, Z.; Bai, B.; Ng, D.W.K. Performance Analysis of Coded OTFS Systems over High-Mobility Channels. IEEE Trans. Wirel. Commun. 2021, 20, 6033–6048. [Google Scholar] [CrossRef]
- Wei, Z.; Yuan, W.; Li, S.; Yuan, J.; Bharatula, G.; Hadani, R.; Hanzo, L. Orthogonal Time-Frequency Space Modulation: A Promising Next-Generation Waveform. IEEE Wirel. Commun. 2021, 28, 136–144. [Google Scholar] [CrossRef]
- Hadani, R.; Rakib, S.; Molisch, A.F.; Ibars, C.; Monk, A.; Tsatsanis, M.; Delfeld, J.; Goldsmith, A.; Calderbank, R. Orthogonal Time FrequencySpace (OTFS) modulation for millimeter-wave communications systems. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honololu, HI, USA, 4–9 June 2017; pp. 681–683. [Google Scholar]
- Feng, X.; Esmaiel, H.; Wang, J.; Qi, J.; Zhou, M.; Qasem, Z.A.; Sun, H.; Gu, Y. Underwater Acoustic Communications Based on OTFS. In Proceedings of the 2020 15th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 6–9 December 2020; pp. 439–444. [Google Scholar]
- Bocus, M.J.; Doufexi, A.; Agrafiotis, D. Performance of OFDM-based massive MIMO OTFS systems for underwater acoustic communication. IET Commun. 2020, 14, 588–593. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Q.; Wang, Y.; He, C.; Shi, W. A low-complexity orthogonal time frequency space modulation method for underwater acoustic communication. J. Northwest. Polytech. Univ. 2021, 39, 954–961. (In Chinese) [Google Scholar] [CrossRef]
- Jing, L.; Zhang, N.; He, C.; Shang, J.; Liu, X.; Yin, H. OTFS underwater acoustic communications based on passive time reversal. Appl. Acoust. 2022, 185, 108386. [Google Scholar] [CrossRef]
- Hang, S.; Li, W. OTFS for Underwater Acoustic Communications: Practical System Design and Channel Estimation. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022. [Google Scholar]
- Başar, E.; Aygölü, Ü.; Panayırcı, E.; Poor, H.V. Orthogonal Frequency Division Multiplexing with Index Modulation. IEEE Trans. Signal Process. 2013, 61, 5536–5549. [Google Scholar] [CrossRef]
- Liang, Y.; Li, L.; Fan, P.; Guan, Y. Doppler Resilient Orthogonal Time-Frequency Space (OTFS) Systems Based on Index Modulation. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar]
- Zhu, Y.; Xie, F.; Zhang, M.; Wang, B.; Ge, H. Index Detection for Underwater Acoustic FBMC-IM System Based on Deep Bidirectional Long Short-Term Memory Network. Dianzi Yu Xinxi Xuebao/J. Electron. Inf. Technol. 2022, 44, 1984–1990. [Google Scholar]
- Wang, J.; Cui, Y.; Liu, L.; Ma, S.; Pan, G. Frequency offset estimation for index modulation-based cognitive underwater acoustic communications. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017. [Google Scholar]
- Wen, M.; Cheng, X.; Yang, L.; Li, Y.; Cheng, X.; Ji, F. Index modulated OFDM for underwater acoustic communications. IEEE Commun. Mag. 2016, 54, 132–137. [Google Scholar] [CrossRef]
- Qarabaqi, P.; Stojanovic, M. Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channels. IEEE J. Ocean. Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index Bit | Active Sub-Grid | Sub-Grid Group |
|---|---|---|
| Index Bit | Active Sub-Grid | Sub-Grid Group |
|---|---|---|
| redundancy | ||
| redundancy |
| Parameters | Value |
|---|---|
| Surface height (m) | 100 |
| Transmitter height (m) | 20 |
| Receiver height (m) | 50 |
| Channel distance (m) | 1000 |
| Spread factor (kHz) | 1.7 |
| Doppler factor (v/c) | 10−4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Wang, B.; Zhu, Y.; Fang, Z.; Han, Z. Hamming Distance Optimized Underwater Acoustic OTFS-IM Systems. Entropy 2023, 25, 972. https://doi.org/10.3390/e25070972
Guo X, Wang B, Zhu Y, Fang Z, Han Z. Hamming Distance Optimized Underwater Acoustic OTFS-IM Systems. Entropy. 2023; 25(7):972. https://doi.org/10.3390/e25070972
Chicago/Turabian StyleGuo, Xiaopeng, Biao Wang, Yunan Zhu, Zide Fang, and Zhaoyue Han. 2023. "Hamming Distance Optimized Underwater Acoustic OTFS-IM Systems" Entropy 25, no. 7: 972. https://doi.org/10.3390/e25070972
APA StyleGuo, X., Wang, B., Zhu, Y., Fang, Z., & Han, Z. (2023). Hamming Distance Optimized Underwater Acoustic OTFS-IM Systems. Entropy, 25(7), 972. https://doi.org/10.3390/e25070972