Abstract
In this review work, we outline a conceptual path that, starting from the numerical investigation of the transition between weak chaos and strong chaos in Hamiltonian systems with many degrees of freedom, comes to highlight how, at the basis of equilibrium phase transitions, there must be major changes in the topology of submanifolds of the phase space of Hamiltonian systems that describe systems that exhibit phase transitions. In fact, the numerical investigation of Hamiltonian flows of a large number of degrees of freedom that undergo a thermodynamic phase transition has revealed peculiar dynamical signatures detected through the energy dependence of the largest Lyapunov exponent, that is, of the degree of chaoticity of the dynamics at the phase transition point. The geometrization of Hamiltonian flows in terms of geodesic flows on suitably defined Riemannian manifolds, used to explain the origin of deterministic chaos, combined with the investigation of the dynamical counterpart of phase transitions unveils peculiar geometrical changes of the mechanical manifolds in correspondence to the peculiar dynamical changes at the phase transition point. Then, it turns out that these peculiar geometrical changes are the effect of deeper topological changes of the configuration space hypersurfaces as well as of the manifolds bounded by the ∑v. In other words, denoting by vc the critical value of the average potential energy density at which the phase transition takes place, the members of the family are not diffeomorphic to those of the family ; additionally, the members of the family are not diffeomorphic to those of . The topological theory of the deep origin of phase transitions allows a unifying framework to tackle phase transitions that may or may not be due to a symmetry-breaking phenomenon (that is, with or without an order parameter) and to finite/small N systems.
Keywords:
statistical mechanics; phase transitions; Hamiltonian dynamics; Riemannian geometry; differential topology PACS:
05.20.Gg, 02.40.Vh, 05.20.- y, 05.70.- a
1. Introduction
Statistical physics has been devised by its founding fathers, Boltzmann and Gibbs, to predict the macroscopic physical properties of systems composed of a large number of atoms or molecules by getting rid of the knowledge of microscopic dynamics.
On the basis of the knowledge of the interatomic or intermolecular forces acting among a many-body system with a large number of degrees of freedom, the Gibbs ensemble formulation of statistical mechanics allows us to derive all the macroscopic equilibrium properties of such a system. Moreover, there is a variety of phenomena (also making up part of our common daily experience) such as the condensation of a gas or the solidification of a liquid—in general, a change in the state of aggregation of matter—whose explanation is naturally expected within the framework as statistical mechanics. This last topic is part of a broad and interesting field that includes a wealth of collective phenomena: phase transitions. In nature, at very different scales of space and energy, phase transition phenomena are ubiquitous. Usually, phase transitions are related to a spontaneous symmetry breaking [1,2]. However, this is not an all-encompassing framework because many physical systems do not fit this scheme and undergo a phase transition in the absence of symmetry breaking. Furthermore, while the Yang–Lee [3,4] and Dobrushin–Lanford–Ruelle [5] theories require the limit (thermodynamic limit) to mathematically describe a phase transition, transition phenomena in small- systems are particularly relevant in many contemporary problems and are at odds with this theoretical framework.
A new insight into the foundations of statistical mechanics became available at the dawning of the computer era with the pioneering work of E. Fermi, J. von Neumann and S. Ulam [6] through the “long time” numerical solution of the equations of motion of a set of interacting particles. Since then, a vast literature on the dynamical phenomenology of many -particle Hamiltonian systems has been produced, and, among other phenomena, phase transitions have been also investigated from the microscopic dynamical viewpoint [7,8,9,10,11].
The novelty of the theoretical proposal discussed here comes from the combination of the study of phase transitions from the point of view of Hamiltonian dynamics with the identification of the natural motions of a Hamiltonian system with the geodesics of properly defined Riemannian manifolds [12,13,14,15,16], hence the possibility to deepen our understanding of the relation between the macroscopic physics of many-particle systems with their microscopic dynamical counterpart. In fact, after the Riemannian geometrization of dynamics, we can naturally wonder whether there is a specific geometrical counterpart occurring to these mechanical manifolds when a Hamiltonian system displays a phase transition: in other words, if and how the appearance of a phase transition can be “geometrically read”. This is where topology comes into play and, in a sense to be specified, it is found that for a large class of systems, a phase transition can occur only if the mentioned geometric changes are the product of suitable topological changes of certain submanifolds of the configuration space. The remarkable consequence from a theoretical point of view is that the singular behaviors of thermodynamic observables at the critical point of a phase transition follow from a phenomenon which is independent of the statistical measures. The topological origin of phase transitions is a necessary but not sufficient condition as is proven by two theorems and by the study of exactly solvable models.
The paper is organized as follows. In Section 2, we review how classical Hamiltonian dynamics is “translated” into geometrical terms. In Section 3, the dynamical and geometric counterparts of phase transitions are considered. In Section 4, how this leads to the topological theory of phase transitions is then discussed. Finally, in a discussion section, an overview is given about present and future prospective applications in both classical and quantum systems.
2. Riemannian Geometric Formulation of Hamiltonian Dynamics
By a natural Hamiltonian system, it is meant a system whose kinetic energy is a quadratic form in the velocities. Any Newtonian system, that is, a system of particles interacting by forces derived from a potential, belongs to this class. The solutions of Newton equations are trajectories of the configuration space that can be identified with the geodesics of an appropriate Riemannian manifold. This variational formulation of the dynamics is at the basis of this classic result. In fact, after the least action principle, the natural movements of a Hamiltonian/Newtonian system are the extrema of the Hamiltonian action
where is the Lagrangian function of the system, and on the other side, the geodesics of a Riemannian manifold are the extrema of the length functional
where is the arc length parameter. By establishing the link between length and action, thanks to an appropriate choice of metric, the identification of geodesics of an appropriate Riemannian manifold with the physical trajectories naturally follows.
The added value of the geometric formulation of Hamiltonian/Newtonian dynamics consists in the understanding of the origin of deterministic chaos in these systems together with the possibility of analytically computing the largest Lyapunov exponent, the paradigmatic indicator of the presence of chaos and measure of its strength.
Dating back to the 1940s, N.S. Krylov [12] tried to exploit the Riemannian geometrization of Hamiltonian dynamics to account for the relaxation to the equilibrium of many-particle systems through the dynamical instability later called deterministic chaos. The subsequent attempts to explain the origin of chaos in Newtonian/Hamiltonian dynamical systems by resorting to the mentioned Riemannian framework invariably failed. These failures were the consequence of the unquestioned hypothesis according to which chaos can arise only from the hyperbolicity of the mechanical manifolds. To the contrary, as it will be discussed below, numerical experiments have revealed another mechanism (parametric resonance due to curvature variability along the geodesics) entailing the chaotic instability of geodesic flows associated with physically significant Hamiltonians. The instability of the geodesics of mechanical manifolds, and therefore the study of chaos, makes use of the Jacobi–Levi–Civita equation for the geodesic spread to work out an analytic formula for the largest Lyapunov exponent. Applied to some models, this analytic formula allows to find a strikingly good agreement between theoretical predictions and numerical values of the largest Lyapunov exponent computed by means of the standard tangent dynamics equation.
2.1. The Jacobi Metric in Configuration Space
There are several possible choices for the ambient space and its metric to formulate the Riemannian geometrization of classical dynamics. Among other possible choices, the most known one since the nineteenth century is the so-called Jacobi metric on the configuration space of a given system. In fact, Krylov’s work was performed in this geometric framework. Let us consider systems described by a Lagrangian of the form
where
and are the components of the kinetic energy matrix, and is the potential energy. It is well known that the natural motions are the class of curves that make stationary the action functional
on the class of curves with and and thus isochronous paths. The Newton equations are derived from the Euler–Lagrange equations, i.e.,
In a purely geometric framework, geodesics are curves of a Riemannian manifold endowed with a metric that makes stationary the length functional between two fixed points, i.e.,
A possible identification of natural motion with geodesics is provided by endowing a subspace of configuration space with the Jacobi metric as follows: Consider the total energy function
which is a conserved quantity because . Since the Lagrangian is a homogeneous function in , it follows that where
is the kinetic energy. Considering a class of isoenergetic trajectories in configuration space, that is, trajectories with the same total energy value , since the kinetic energy is non-negative, the trajectories of the system in configuration space belong to the region . Moreover, for isoenergetic trajectories, the kinetic energy can be expressed as a function of the coordinates, i.e.,
and thus, the action functional of Equation (5) can be rewritten in the form
as we are interested in the variational principle and are fixed quantities, the first term in the last equality can be neglected. The integral in Equation (11) can be interpreted as a length integral in configuration space; in fact,
where the new metric
called the Jacobi metric, is introduced with the associated arc length element
A conformal rescaling of the kinetic energy metric via a factor proportional to the kinetic energy gives the Jacobi metric, preserving the signature of the metric only inside . By endowing the region with the Jacobi metric , the natural motions with fixed energy are the same as the geodesics of the manifold , that is
and using the definition of the Christoffel symbols
it is straightforward to show that Equation (15) becomes
whence, using Equation (14), Newton’s equations
are recovered.
2.2. The Eisenhart Metric in Enlarged Configuration Space
Another way of geometrizing Hamiltonian/Newtonian dynamics consists in considering as ambient space the configuration spacetime with an extra dimension—proportional to the action—, with local coordinates . Endowed with a nondegenerate pseudo-Riemannian metric introduced by Eisenhart [17], this space has the following arc length
where and run from to and and run from 1 to , which is the so-called Eisenhart metric of metric tensor . Hence, the canonical projection of the geodesics of on the configuration spacetime, , entails the natural motions of a Hamiltonian dynamical system. Only those geodesics whose arc lengths are positive definite and given by [18]
correspond to natural motions; the condition (20) can be equivalently formulated in integral form for the extra coordinate :
where and are given as real constants. Conversely, given a point belonging to a trajectory of the system, and given two constants and , the point , with given by (21), describes a geodesic curve in such that . Since the constant is arbitrary, can be taken so that on the physical geodesics.
2.3. Geodesic Spread Equation to Tackle Dynamical (In)Stability
The equation for the geodesic spread—that describes the stability of a geodesic flow of a Riemannian manifold—is the crucial mathematical tool to investigate dynamical chaos. The geodesic spread is quantified by a vector field locally, giving the distance between nearby geodesics. This vector field evolves along a reference geodesic according to the Jacobi–Levi–Civita equation, whose components expression reads
where
is the Riemann curvature tensor. The geodesic separation vector is orthogonal to the velocity vector along the geodesic , i.e.,
where represents the scalar product induced by the metric. Remarkably, the stability or instability of a reference geodesic—which is described by the evolution of —is completely determined by the curvature of the manifold. Thus, if the metric is associated with a physical system, as is the case of Jacobi or Eisenhart metrics, this equation relates the stability or instability of the trajectories to the curvature of the ambient manifold.
From , after trivial algebra
where . Then, with the above expression for the components of the Riemann–Christoffel tensor, we finally obtain [19]
which has general validity independently of the metric of the ambient manifold.
2.3.1. Curvature of the Mechanical Manifolds
The Jacobi metric is conformally flat when it is a conformal deformation of a diagonal kinetic energy metric . This greatly simplifies the computation of curvatures with the aid of a symmetric tensor defined with components
where is the potential, is the energy, and and stand for the Euclidean gradient and norm, respectively. The curvature of can be expressed through . In fact, the components of the Riemann tensor are
By contraction of the first and third indices, we obtain the Ricci tensor, whose components are
and by a further contraction, we obtain the scalar curvature ()
A great advantage from a computational point of view is given by the Eisenhart metric whose curvature properties are much simpler than those of the Jacobi metric. The only nonvanishing components of the Eisenhart curvature tensor are
and hence, the Ricci tensor has only one nonzero component
and the scalar curvature is identically vanishing,
2.3.2. The Jacobi–Levi–Civita Equation for the Jacobi Metric
The final expression for the JLC equation for derived from Equation (34) is
2.3.3. The Jacobi–Levi–Civita Equation for the Eisenhart Metric
It is a very interesting fact that the JLC equation, when explicitly worked out for the Eisenhart metric on , yields the usual tangent dynamics equation for Hamiltonian flows. In fact,
Since [see (23)], we obtain, from the definition of covariant derivative, , and since , we find that (43) becomes
such that has no acceleration, and without loss of generality, we can put . This latter result combined with the definition of covariant derivative gives
and using , we obtain
so that after (44), the projection in configuration space of the separation vector reads
Equation (45) describes the evolution of the component , which, after does not contribute to the norm of ; therefore, we can disregard Equation (45).
Along the physical geodesics of , such that (49) is exactly the usual tangent dynamics equation
that is, the usual tangent dynamics equation for Hamiltonian flows. Hence, a direct link can be made between the numerical Lyapunov exponents, the “experimental” data—so to speak—on Hamiltonian chaos, and the geometric treatment of chaotic geodesic flows. This fact is an important point in the development of a geometric theory of Hamiltonian chaos because this means that we are not introducing any new definition of chaos in the geometric context. Actually, in Figure 1, the numerical results are reported for the quantity
computed with Equations (42) and (50), respectively, for the FPU model defined in Equation (57). And full agreement is found. Some misleading papers have appeared in the literature, casting doubts on the validity of the description of local dynamical instability based on the Jacobi metric description of Newtonian dynamics [20,21]. These claims have been disproved in Ref. [22].
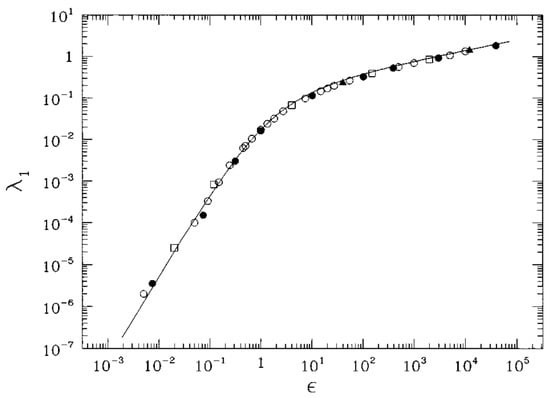
Figure 1.
computed with Equation (42) at is represented by full circles ad computed at by full triangles. The largest Lyapunov exponent computed with Equation (50) is represented by open circles () and open squares (). The solid line is the analytic prediction for as discussed in the following section.
2.4. Analytic Computation of the Largest Lyapunov Exponent
As already mentioned above, several efforts—that followed Krylov’s pioneering work—to resort to the Riemannian geometrization of Hamiltonian dynamics to explain the origin of chaos in these dynamical systems have been unsuccessful. In fact, consider for example the Hénon–Heiles Hamiltonian system
where chaos was numerically detected for the first time [23], and consider the Jacobi–Levi–Civita equation, which—written for and for the Jacobi metric—exactly reads as
where
is the scalar curvature of the manifold which, after Equation (52), turns out to be always positive and therefore at odds with the widespread expectation of geodesic instability and thus chaos, stemming from negatively curved manifolds. The idea that chaos in Newton dynamics has to be associated with hyperbolicity followed some important theoretical results [24,25,26,27,28] that gave rise to abstract ergodic theory. The turning point for the successful use of the Riemannnian geometrization to explain the origin of chaos in Hamiltonian flows was the numerical investigation [14] of the curvature properties probed by the geodesics representing the trajectories of a Hamiltonian system, which showed that for flows of physical interest, it is the variations in curvature rather than the hyperbolicity of the underlying manifold that destabilize the geodesics/trajectories (see Figure 2 for a pictorial illustration of this mechanism). The variability in the curvature probed by a geodesic activates parametric instability [29] even on all positively curved manifolds. In particular, for the Hénon–Heiles model, this has been studied in detail in Ref. [30]. The geometrization of dynamics provides a unique fundamental explanation of the origin of chaos, and, at least in some computable cases, it allows to get rid of the numerical computation of the Lyapunov exponent along with the numerical computation of the dynamics. We refer the reader to see elsewhere [14,15,16,31] for the details of a successful strategy to work out the following effective instability equation:
where is such that , is the Ricci curvature of the mechanical manifold, stands for averaging on it, and is a Gaussian-distributed -correlated random process. This equation is independent of the dynamics and depends only on some total curvature property of the mechanical manifold. Equation (55) has the form of a stochastic oscillator equation whose solution has an exponentially growing envelope due to parametric instability, which seems to be a ubiquitous mechanism responsible for chaos in physical Hamiltonians. The geometrization of dynamics allows the development of a “statistical–mechanical” description of the average strength of chaos, bringing about the possibility of an analytic computation of the largest Lyapunov exponent through the general formula (56) for the rate of the exponential growth of , which is worked out by means of van Kampen’s method [32] to give the following [15,16,31].
where , and is a characteristic time defined through a geometric argument. The two following “paradigmatic” applications have proven the validity and power of the geometric approach. The first is in the case of a chain of harmonic oscillators also coupled through a quartic anharmonic potential (the FPU -model) described by the Hamiltonian
which in normal modes (phonons) also reads as
and the averages can be analytically computed using the Eisenhart metric so that after Equation (56), the impressive result of Figure 3 is found.

Figure 2.
Pictorial representation of how two geodesics— and , issuing respectively from the close points and —separate on a 2D “bumpy” manifold where the variations of curvature activate parametric instability.
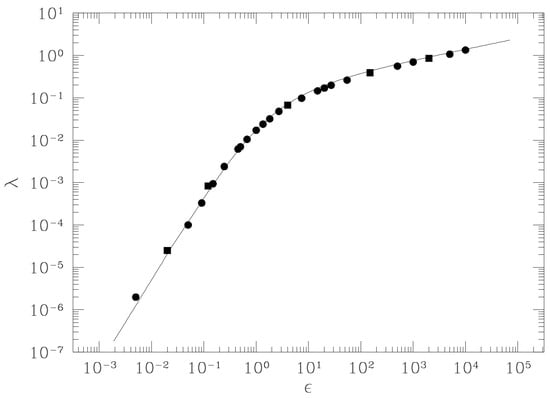
Figure 3.
Lyapunov exponent vs. energy density for the FPU model with . The continuous line is the theoretical computation according to Equation (56), while the circles and squares are the results of numerical simulations with respectively equal to 256 and 2000. From [31].
Second, in the case of a chain of coupled rotators, also referred to as the 1d- classical spin model described by
that, for unimodular spin variables (), reads as
it is again possible to analytically compute the averages using the Eisenhart metric so that after Equation (56), another impressive result given in Figure 4 is found (in this case, a correction to the distribution of is necessary: see Ref. [31]).
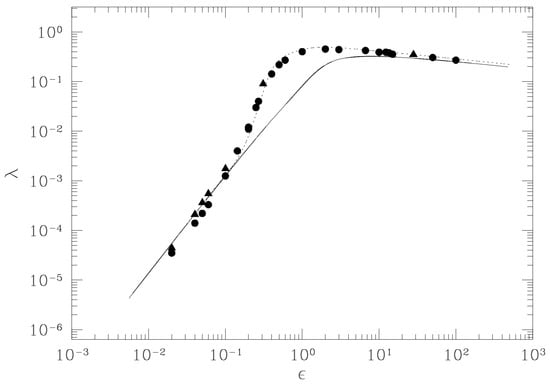
Figure 4.
Lyapunov exponent vs. energy density for the 1d- model with . The continuous line is the theoretical computation according to (56), while full circles, squares, and triangles are the results of numerical simulations with , respectively, equal to 150, 1000, and 1500. The dotted line is the theoretical result, where the value of has been corrected to account for an excess of negative values of in an intermediate interval of values.
3. Geometry and Chaos at Phase Transitions
As already mentioned in the Introduction, the macroscopic properties of large- Hamiltonian systems can be understood using traditional statistical mechanics methods. Among the others, there is a class of phenomena where the macroscopic thermodynamic quantities can change dramatically when an external control parameter (e.g., temperature or energy) crosses a critical value. These are collective phenomena called phase transitions empirically identified by discontinuities of macroscopic thermodynamic quantities. From a theoretical viewpoint, phase transitions are explained as true mathematical singularities that occur in thermodynamic functions in the thermodynamic limit, that is, . Now, the main hypothesis at the grounds of statistical mechanics is ergodicity of the underlying dynamics, a property which is bona fide ensured by dynamical chaoticity. It is therefore natural to wonder whether there is any specific signature provided by the largest Lyapunov exponent when a system undergoes a phase transition, and, if this is the case, what the geometric changes of the configuration-space manifold are in the presence of a phase transition, in view of the above-described geometric description of chaos.
Let us consider the XY model in three spatial dimensions described by the Hamiltonian
This model undergoes a standard continuous (second-order) phase transition accompanied by the breaking of the symmetry of the Hamiltonian. The behavior of the largest Lyapunov exponent as a function of the temperature is shown in Figure 5, where the appearance of an “angular” point is evident in the pattern of at the transition point, which is even more evident in the inset of Figure 5. The pattern reported in Figure 4 for a system having the same symmetry—but in the absence of phase transitions—is definitely smoother than the one of Figure 5 (despite the difference in the variable in abscissas). Another clear example of how the energy pattern of the largest Lyapunov exponent looks very different in the presence versus in the absence of a phase transition is provided by the comparison between reported in Figure 3 versus the one in Figure 6, the latter referring to the so-called lattice model, i.e., a system described by the Hamiltonian
where are scalar variables defined on the sites of a -dimensional lattice, are the conjugated momenta, and stands for nearest-neighbor sites on the lattice. This system has a discrete -symmetry and short-range interactions; therefore, according to the Mermin–Wagner theorem, in , there is no phase transition, whereas in , there is a second-order symmetry-breaking transition, with nonzero critical temperature, of the same universality class of the Ising model.
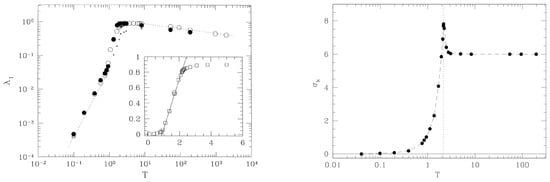
Figure 5.
Left panel: Lyapunov exponent vs. the temperature for the three-dimensional model, defined in (61), numerically computed on an lattice (solid circles) and on an lattice (solid squares). The critical temperature of the phase transition is . From [7]. Right panel: Fluctuations of the Ricci curvature (Eisenhart metric), for the same model. Here, . The critical temperature of the phase transition is marked by a vertical dotted line.
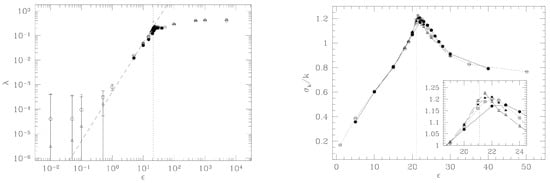
Figure 6.
Left panel: Lyapunov exponent vs. the energy per particle , numerically computed for the two-dimensional model, with (solid circles), (open circles), (solid triangles), and (open triangles). The critical energy is marked by a vertical dotted line, and the dashed line is the power law . From [9]. Right panel: Root mean square fluctuation of the Ricci curvature (Eisenhart metric) , divided by the average curvature , numerically computed for the same model. The inset shows a magnification of the region close to the transition.
Also, the Hamiltonian of the FPU -model is invariant under transformations, but being one-dimensional, it does not undergo a phase transition. A sharp “cuspy” point of is observed at the critical energy value of the phase transition of the lattice model. To the contrary, the pattern of for the FPU model is definitely smooth. Since Lyapunov exponents are tightly related to the geometry of the mechanical submanifolds of configuration space, it is natural to wonder what happens to the geometry of these manifolds in correspondence of the “cuspy” energy—or temperature—patterns of . The geometric quantities that enter the analytic Formula (56) for are the average Ricci curvature and its variance. The interesting result is that the phase transition point is marked by a peak in the curvature fluctuations as is shown in the right panels of Figure 5 and Figure 6. This fact is invariably observed for all the models undergoing phase transitions that are studied also from this geometrical viewpoint. The observation that the topology change driven by a continuously varying parameter in a family of two dimensional–surfaces is accompanied by a sharp peak in the variance of the Gaussian curvature suggests that the observed geometrical signature of phase transitions hints at the possible relevant role of topology [16].
Lyapunov Exponents and Configuration Space Topology
Let us give an intuitive idea of the relationship between critical points of a function in a given space and the topology of its level sets by considering a low-dimensional and elementary case. Given a smooth function , bounded below, such that , its level sets are diffeomorphically transformed one into the other by the flow [33]
where , i.e., the points of a hypersurface with are mapped by this flow to the points of another with , provided that never vanishes in the interval . In other words, if in the interval the function has no critical points, all the level sets , with , have the same topology. Conversely, the appearance of critical points of at some critical value breaks the diffeomorphicity among the and . This is illustrated by one of the simplest possible examples [34] in Figure 7. A systematic study is developed within Morse theory of the relationship between the topological properties of a manifold and the critical points of a suitable class of real-valued functions (Morse functions) defined on it. Any Morse function can be parametrized, in the neighborhood of a critical point located at , by means of the so-called Morse chart, i.e., a system of local coordinates , such that ( is the Morse index of the critical point) [35]. In particular, if , Morse theory tells us that if there are critical points of in configuration space, that is, points such that , in the neighborhood of any critical point , there always exists a coordinate system for which
where the index of the critical point is the number of negative eigenvalues of the Hessian of computed at . In the neighborhood of a critical point, Equation (63) yields , which, substituted into Equation (50), gives
where there are unstable directions that contribute to the exponential growth of the norm of the tangent vector . This means that the strength of dynamical chaos, measured by the largest Lyapunov exponent , is affected by the existence of critical points of . Therefore, the presence of a sudden variation, as a function of the potential energy , of the number of critical points (or of their indexes) in configuration space at some value can affect the pattern of —as well as that of —since . In other words, peculiar energy patterns of displaying “singular” patterns—for example, jumps or cusps—at a phase transition point are suggestive of being rooted in some kind of topological change in the hypersurfaces , and also in the bounded by the .
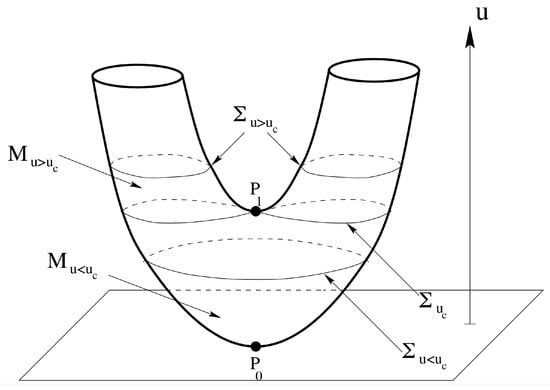
Figure 7.
Here, the function is the height of a point of the bent cylinder with respect to the ground. In , it is . The level sets below this critical point are circles, whereas above are the union of two circles. The manifolds are disks for and cylinders for .
4. Topology and Phase Transitions
In addition to the arguments—reported in the preceding section—suggesting a possible role of topology at the roots of phase transitions, there is another reason supporting this hypothesis. This is due to a quantitative connection between the geometry and topology of the energy landscape in phase space, or in configuration space, and thermodynamic entropy defined as
that is [16]
where are the Betti numbers of the constant energy hypersurfaces in phase space, and is a remainder function. Betti numbers are fundamental topological invariants under diffeomorphisms of a manifold [36]. Another version of this formula reads
which now holds in configuration space and where the are the Morse indexes (in one-to-one correspondence with topology changes) of the submanifolds of configuration space. These formulas are approximate, but, following a different conceptual path and using the definition , an exact formula can also be derived, which reads [16]
where the first term in the square brackets is the configuration-space volume minus the sum of volumes of certain neighborhoods of the critical points of the interaction potential; the second term is a weighed sum of the Morse indexes ( is number of critical points of index ); and the third term is a smooth function. The above formula is of special interest because it provides an exact relation between entropy and some quantities of topological meaning. It is evident that abrupt changes in the potential energy pattern of at least some of the (thus, of the way topology changes with ) affect and its derivatives; equivalently, abrupt changes in the total energy pattern of the (thus, of the way topology changes with ) affect and its derivatives. All the arguments given hitherto lead to the formulation of a topological hypothesis. Concisely, consider the microcanonical volume
where the larger that is, the closer to some the microscopic configurations are that significantly contribute to the statistical averages, and therefore, the idea is that in order to observe the development of singular behaviors of thermodynamic observables at some critical value , it is necessary to break the diffeomorphicity between the families and , that is, the need to undergo a topology change at .
4.1. Rigorous Results
There are two Hamiltonian systems for which we can exactly compute the partition function, and thus prove the existence of a phase transition, its order, and the transition critical values of the energy, potential energy, and temperature; moreover, for the same systems, it is possible to analytically compute all the critical points of the potential function and their Morse indexes, and hence the potential energy dependence of the Euler characteristic, a topological invariant. The rigorous outcomes confirm, at least for the special case of these two models, the topological hypothesis. In Refs. [37,38], the topological hypothesis, exactly confirmed for the two mentioned systems, is turned into a theorem where a necessary topological condition for the occurrence of first- or second-order phase transitions is established.
4.1.1. Two Exactly Computable Models
The two Hamiltonian systems previously mentioned are the so-called mean-field model and -trigonometric model (kTM).
The mean-field model is defined by the Hamiltonian
Here, is the rotation angle of the ith unimodular classical spin, and is an external field. Defining at each site a spin vector , the model describes a planar () Heisenberg system with interactions of equal strength among all the spins. The Euler characteristic can be computed analytically as a function of the potential energy per degree of freedom according to the formula
where the Morse number is the number of critical points of the potential function in Equation (69) that have index [34].
Figure 8 shows that a sharp jump in takes place at , where the system undergoes a second-order phase transition. No jump is observed in the case of the 1d- model having the same symmetry and spatial dimensionality of the mean-field model but with short-range interactions such that, after the Mermin–Wagner theorem, it does not undergo any phase transition.
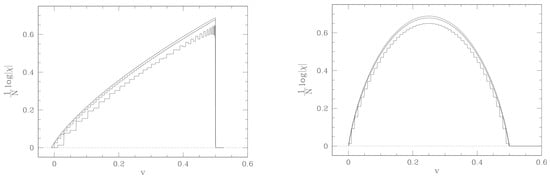
Figure 8.
Left panel: Mean-field model. Plot of as a function of . 50, 200, 800 (from bottom to top) and ; . Right panel: Plot of for the one-dimensional model with nearest-neighbor interactions as a function of . 50, 200, 800 (from bottom to top).
The kTM is defined by the Hamiltonian
where are angular variables, and are the conjugated momenta, and the potential energy is given by
where is a coupling constant. Again, as in the case of the mean-field model, only the potential energy part is considered. This interaction energy is apparently of a mean-field nature, in that each degree of freedom interacts with all the others; moreover, the interactions are -body ones. For , no phase transition is present; for , the system undergoes a second-order phase transition; and for , the system undergoes a first-order phase transition. In all these cases, the partition function can be exactly computed, and the Euler characteristic can be exactly computed as well. Figure 9 shows a clear-cut topological signature of the presence of a phase transition and of its order.
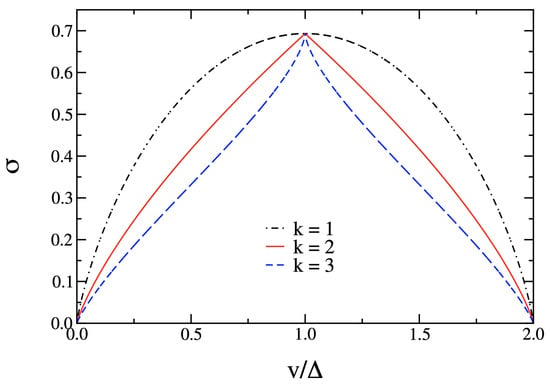
Figure 9.
Logarithmic Euler characteristic of the manifolds as a function of the potential energy . The phase transition is signaled as a singularity of the first derivative at ; the sign of the second derivative around the singular point allows to predict the order of the transition.
4.1.2. A Necessity Theorem
The theorem establishing the necessary topological origin of a phase transition, in its original formulation, given in Refs. [37,38], was lacking a fundamental hypothesis, which led to the paradoxical situation of it being falsified [39] through the example of phase transition still linked to a change in topology in the configuration space, despite being asymptotic in the number of degrees of freedom [40], and in the absence of critical points of the potential.
The missing hypothesis suggested by the study of Ref. [40] consists in also requiring the asymptotic diffeomorphicity of the equipotential hypersurfaces to correspondingly obtain a uniform convergence of the Helmholtz free energy in a class of differentiability that excludes phase transitions of the first and second orders.
Theorem 1
(Absence of phase transitions under diffeomorphicity). Let be a smooth, nonsingular, finite-range potential. Denote by , , its level sets, or equipotential hypersurfaces, in configuration space.
Then, let be the potential energy per degree of freedom.
If, for any pair of values and belonging to a given interval and for any with (that is including ) we have
that is, is diffeomorphic to , including asymptotically diffeomorphic, then the sequence of the Helmholtz free energies —where ( is the temperature) and —is uniformly convergent at least in such that and neither first- nor second-order phase transitions can occur in the (inverse) temperature interval .
Remark 1.
The configurational entropy is related to the configurational canonical free energy in (74) for any , , and through the Legendre transform
where the inverse of the configurational temperature is given by . By following Ref. [41], let us consider the function , and from it is evident that if , then also and thus , while . First- and second-order phase transitions are associated with a discontinuity in the first or second derivatives of , that is, with or , respectively. Hence, a first-order phase transition corresponds to a discontinuity of the second derivative of the entropy , and a second-order phase transition corresponds to a discontinuity of the third derivative of the entropy .
Remark 2.
The proof of the main theorem follows the same conceptual path given in Refs. [37,38]: a topological change in the equipotential hypersurfaces of the configuration space is a necessary condition for the occurrence of a thermodynamic phase transition if we prove the equivalent proposition that if any two hypersurfaces and with are diffeomorphic for all , then no phase transition can occur in the (inverse) temperature interval .
For standard Hamiltonian systems (i.e., quadratic in the momenta), the relevant information is carried by the configurational microcanonical ensemble, where the configurational canonical free energy is
and the configurational microcanonical entropy (in units s.t. ) is
Then, is related to the configurational canonical free energy for any , , and through the Legendre transform in Equation (73).
With the aid of several Lemmas [42], it is shown that in the limit and at constant particle density , in the interval , the sequence is uniformly convergent in so that , that is, the thermodynamic limit of the entropy is three times differentiable, with a continuous third-order derivative, in . Hence, in the interval , the sequence of configurational free energies is uniformly convergent at least in so that we have
that is, .
Since a quadratic kinetic energy term of a standard Hamiltonian gives only a smooth contribution to the total Helmholtz free energy , also the asymptotic function has differentiability class so that we conclude that the corresponding physical system does not undergo neither first- nor second-order phase transitions in the inverse-temperature interval .
This theorem is used to prove that in (67), the origin of the possible unbound growth with of some derivative of the entropy, that is, of the development of an analytic singularity in the limit and thus of a phase transition, can be due only to the topological term [43].
It is important to remark that a topological change in the submanifolds and of the configuration space is a necessary but not sufficient condition for the occurrence of a phase transition. In fact, in Figure 8 and Figure 9, it is evident that is almost continuously changing with , meaning that the topology of the undergoes almost continuous changes with . It is rather the way of changing of the topology which is associated with a phase transition. Some first steps toward sufficiency conditions are given in Ref. [44].
4.2. Applications
In general, the computation of any topological invariant through the computation of all the critical points of the potential function of a given system is prohibitive and unfeasible, both analytically and numerically. Therefore, one has to resort to an alternative approach in order to obtain information on the topology of the manifolds of interest. This can be performed by resorting to theorems in differential topology relating the total geometric quantities of a given manifold with its topology. With “total”, it is meant the integral of a given quantity over the whole manifold. The following theorems can be applied in the framework of numerical computations.
The first important result is the Gauss–Bonnet–Hopf theorem [45,46], which is expressed by the following equation:
where is an -dimensional hypersphere of the unit radius, and is the Euler characteristic of the level set of the potential function . is the Gauss–Kronecker curvature given by
A slight modification of this formula yields the following nontrivial result due to Chern and Lashof [45,46]:
where are the Morse indexes of , which are defined as the number of critical points () of index on a given level set ; as already mentioned above, the index of a critical point is the number of negative eigenvalues of the Hessian of computed at the critical point. The are the Betti numbers of the hypersurfaces. The Betti numbers are fundamental topological invariants of differentiable manifolds; they are the diffeomorphism-invariant dimensions of suitable vector spaces (the de Rham cohomology spaces) defined on a given manifold; thus, they are integers.
Another theorem in differential topology that can be constructively used in numerical simulations is Pinkall’s theorem, which states that [47]
where , and is the volume of the unit -sphere, and, given the potential function of a system, can be easily computed as
where and are, respectively, the Laplacian and the Hessian of the potential function , and where is a small remainder, we notice that the dispersion of principal curvature is related to the sum of Betti numbers.
Another theorem that can be used is Overholt’s theorem, which states that the range of variability of the scalar curvature can be used to estimate the range of variability of the sectional curvatures, and it is given by [48]
Hence, it turns out that the variations in the topology of detected by the Betti numbers can shape the potential energy profile of . By being the scalar curvature of a manifold, the sum of all the sectional curvatures, and thereby, the variance of the scalar curvature , is
4.2.1. Phase Transitions in Small N Systems
A paradigmatic example of a phase transition in small systems, thus far from the thermodynamic limit, is provided by the protein folding transition, that is, the transition from a filament composed of a sequence of amino acids to the biologically functional folded structure, takes place in systems with a number of degrees of freedom much smaller than the Avogadro number and in the absence of the symmetry-breaking phenomenon. In Ref. [49], a minimalistic model of a polypeptide for the SH3 and PYP protein sequences and for their randomized versions have been considered by means of a Cα-based Gō-model [50] via the SMOG2 [51] implementation, on the basis of the structures reported in the Protein Data Bank (1FMK for SH3 and 3PHY for PYP). It turns out that in addition to the standard signatures of the folding transition—discriminating between protein sequences of amino acids and random heteropolymer sequences—also peculiar geometric signatures of the equipotential hypersurfaces in configuration space can discriminate between proteins and random heteropolymers. These geometric signatures are the “shadows” of deeper topological changes that take place in correspondence with the protein folding transition. Therefore, seen from the deepest level of topology changes of equipotential submanifolds of the phase space, the protein folding transition fully qualifies as a phase transition, in spite of the small number of degrees of freedom.
In Figure 10, at the folding temperature, the temperature dependence of shows a rather sharp jump for the PYP protein and a milder jump with an inflection point for the SH3 protein. After Equations (80) and (81), the underpinning phenomenon of the temperature dependence of is a jump in the sum of the Betti numbers, and thus a major change in the topology of the potential level sets . This is confirmed by Figure 11, where the potential energy density dependence of is reported. In fact, according to the Pinkall theorem expressed by Equation (78), the jumps of versus are closely related to the corresponding jumps of a weighted sum of Betti numbers.
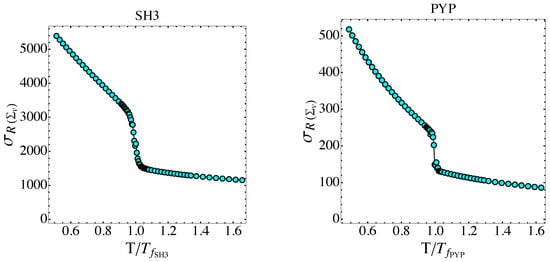
Figure 10.
The variance of the scalar curvature of the potential level sets is reported versus temperature normalized by the folding temperature for the SH3 and PYP proteins, respectively.
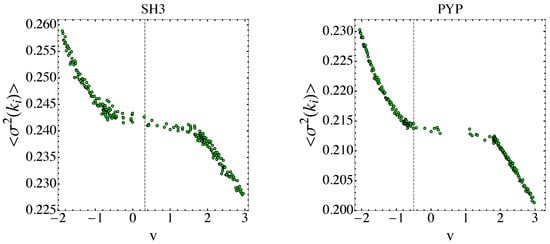
Figure 11.
The variance in sectional curvatures of the potential level sets is reported versus potential energy density for the SH3 and PYP proteins, respectively. Vertical dashed lines correspond to the folding transitions.
4.2.2. Phase Transitions in the Absence of Symmetry Breaking
On a -lattice , with , the following model Hamiltonian describes a dual Ising model [52] added with a quadratic kinetic energy term and a quartic term introduced for numerical reasons:
This model undergoes a phase transition but, having a gauge (local) symmetry
after Elitzur’s theorem [53], it has no order parameter, and the phase transition is not associated with a global symmetry breaking mechanism. The numerical integration of the Hamilton equations of motion of this model allows to detect a first-order phase transition through thermodynamic observables [41]. Among the other observables detecting the transition, in Figure 12, the second-order derivative (with respect to the potential energy density) of the configurational entropy displays a jump which steepens at increasing (left panel). Correspondingly, the right panel of Figure 12 displays a clear jump in the second-order derivative (with respect to the potential energy density) of the quantity denoted by , the variance of the mean curvature integrated over a potential level set , which is explicitly related to the topology of these level sets after the above-mentioned Pinkall’s theorem [41].
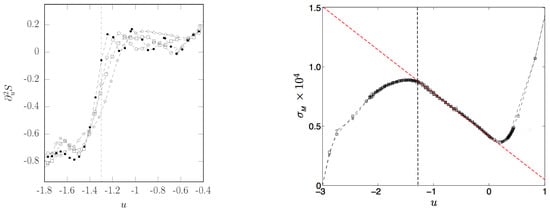
Figure 12.
Left panel: Second derivative of the configurational entropy versus the average potential energy per degree of freedom . Lattice dimensions: (rhombs), (squares), (circles), (full circles). The vertical dot-dashed line locates the phase transition point. Right panel: second moment of the total mean curvature of the potential level sets versus the average potential energy per degree of freedom . (rhombs), (squares), (circles). The oblique dashed line is a guide to the eye. The vertical dashed line at corresponds to the phase transition point and to the point where the second derivative jumps from a negative value to zero.
4.2.3. Prospective Applications to Phase Transitions in Quantum Systems
In order to extend to quantum systems the geometric and topological methods developed for classical systems, among other possibilities sketched in [16], we highlight the possible use of the Time-Dependent Variational Principle (TDVP) technique [54,55]. The same technique, more deepened from both the mathematical and conceptual points of view, has been proposed as a “dequantization” technique in [56] as a kind of inverse procedure with respect to the geometrical quantization. This consists in making the ansatz that the wavefunction of a system depends on parameters
where the parameters are, in general, functions of time. For a quantum system with Hamiltonian , the equations of motion of the can be derived using the following variational principle (equivalent to the least action principle):
where is the Lagrangian associated to the system
The equations of motions derived from Equation (84) can be worked out in the framework of classical Hamiltonian dynamics.
The classical Hamiltonian is associated with the quantum one by simply taking the expectation value of the Hamiltonian operator over the state , that is
It is worth mentioning that the TDVP, being a variational approach, applies generically to any quantum system and its effectiveness depends on a reasonable choice of the initial ansatz for the state vector. Moreover, the remarkable fact is that the dynamical equations worked out by means of the TDVP are formally classical but give the time evolution of actual quantum expectation values. Therefore, this seems a promising way to study also quantum phase transitions in the above outlined topological framework.
Another potential method to extend the geometrical approach to quantum systems, particularly quantum field theories on a lattice, is based on the Wick correspondence between the path-integral approach to quantum field theory and classical statistical mechanics. Recent findings indicate that a microcanonical description of quantum field theory [57] on a lattice provides new insights into the deconfinement transition in lattice quantum field theory [58]. This conceptual framework is highly suitable for applying the geometrical and topological characterizations of phase transitions.
5. Conclusions
Phase transition phenomena are associated with apparently singular (nonanalytical) behaviors of the experimentally detected thermodynamic observables at the transition point. This is at odds with the analytical property of the statistical measures that are used to theoretically compute (at least in principle) all the thermodynamic observables. The problem was fixed by the Yang–Lee theorem, which led to the so-called thermodynamic limit—() dogma. Since then, the way we explain the origin of singular behaviors of thermodynamic observables has been identified with the physical phenomenon. In other words, one can properly speak of phase transitions only for systems with an infinite number of degrees of freedom. However, not only does the Avogadro number have nothing to do with ,but modern research in the field has shown a broad variety of experimentally detected phase transitions taking place in small systems. A snowflake of a few hundreds of water molecules suddenly melting to a nanoscopic droplet of water [59], a Bose–Einstein condensate of a few hundreds of atoms [60], a superconductive nanoparticle levitating in a magnetic field that suddenly falls down when the temperature is raised, a filament-globule transition in homopolymers [61], and a protein folding transition [62,63,64] are sudden qualitative changes in the physical properties of small systems, at odds with the theoretical thermodynamic limit dogma.
Moreover, in the Landau theory, phase transitions are usually associated with the phenomenon of a spontaneous symmetry breaking, that is, at low temperatures, the accessible states of a system can be missing some of the global symmetries of the Hamiltonian, and thus, the corresponding phase is the less symmetric one; to the contrary, at higher temperatures, a wider range of energy states having all the symmetries of the Hamiltonian are made accessible by the thermal fluctuations. In the symmetry-breaking phenomena, the physical states of a system are characterized by the order parameter, an extra thermodynamic observable. The order parameter vanishes in the symmetric phase and is different from zero in the broken-symmetry phase. But there are many phase transitions that lack an order parameter and are not associated with the symmetry-breaking phenomenon as is the case of two-dimensional systems with continuous symmetry, after the Mermin–Wagner theorem [65,66], and systems with gauge symmetry, after the Elitzur theorem [53].
The study of phase transitions from a topological point of view has been carried out for several kinds of systems; the nonexhaustive list ranges from entropy-driven transitions [67,68] (having also applications to robotics), to quantum phase transitions [69,70,71], glasses and supercooled liquids [72,73], classical models in statistical mechanics [74,75,76], discrete spin models [77], DNA denaturation [78], and peptide structure [79]. Actually, let us remark that before the explicit formulation of the topological hypothesis [7,8], in many contexts, topological concepts have already and implicitly entered the study of phase transitions while referring to energy landscapes [80,81] and to saddle points of the potential energy of disordered systems, glasses, and spin glasses [72,73]; in fact saddle points are critical points in the language of the Morse theory of differential topology.In reference [82], a topological phase transitions in functional brain networks is reported by resorting to concepts from topological data analysis, topology, geometry, physics, and network theory. The turning point qualifying all the above-mentioned results as a topological theory of phase transitions can be identified with the necessity theorem outlined in Section 4.1.2.
The topological theory of phase transitions provides a unifying framework to tackle phase transitions that may or may not be due to a symmetry-breaking phenomenon (that is, with or without an order parameter) and to finite/small systems. The conceptual leap consists in having unveiled a deeper origin of the phenomenon with respect to its standard description through the singularities of statistical measures. In fact, phase transitions are necessarily rooted in the loss of diffeomorphicity at —the critical value of the average potential energy density at which the phase transition takes place—among the members of the family and those of the family , as well as among the members of the family and those of . But these manifolds depend only on the knowledge of the potential energy of a system, that is, on the interaction potential among its degrees of freedom: nothing else.
There is still room for extensions of the theory, mainly from the computational viewpoint regarding sufficiency conditions, as well as its extension to quantum phase transitions.
Author Contributions
All authors have equally participated in writing and editing the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially supported by the European Union’s Horizon 2020 Research and Innovation Programme under Grant Agreement No. 964203 (FET-Open LINkS project).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Landau, L.D. On the Theory of Phase Transitions. Zh. Eksp. Teor. Fiz. 1937, 7, 926. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Statistical Physics; Elsevier: Amsterdam, The Netherlands, 2013; Volume 5. [Google Scholar]
- Yang, C.N.; Lee, T.D. Statistical theory of equations of state and phase transitions I. Theory of condensation. Phys. Rev. 1952, 87, 404–409. [Google Scholar] [CrossRef]
- Lee, T.D.; Yang, C.N. Statistical theory of equations of state and phase transitions II. Lattice gas and Ising model. Phys. Rev. 1952, 87, 410–419. [Google Scholar] [CrossRef]
- De Gruyter. A comprehensive account of the Dobrushin-Lanford-Ruelle theory and of its developments can be found in: H.O. Georgii. In Gibbs Measures and Phase Transitions, 2nd ed.; De Gruyter: Berlin, Germany, 2011. [Google Scholar]
- Fermi, E.; Pasta, J.; Ulam, S.; Tsingou, M. Studies of Nonlinear Problems I; Los Alamos report LA-1940, reprinted in Collected Papers of Enrico Fermi; Segré, E., Ed.; University of Chicago: Chicago, IL, USA, 1965; Volume 2, p. 978. [Google Scholar]
- Caiani, L.; Casetti, L.; Clementi, C.; Pettini, M. Geometry of dynamics, Lyapunov exponents and phase transitions. Phys. Rev. Lett. 1997, 79, 4361. [Google Scholar] [CrossRef]
- Caiani, L.; Casetti, L.; Clementi, C.; Pettini, G.; Pettini, M.; Gatto, R. Geometry of dynamics and phase transitions in classical lattice φ4 theories. Phys. Rev. E 1998, 57, 3886. [Google Scholar] [CrossRef]
- Caiani, L.; Casetti, L.; Pettini, M. Hamiltonian dynamics of the two-dimensional lattice φ4 model. J. Phys. A Math. Gen. 1998, 31, 3357. [Google Scholar] [CrossRef][Green Version]
- Cerruti-Sola, M.; Clementi, C.; Pettini, M. Hamiltonian dynamics and geometry of phase transitions in classical XY models. Phys. Rev. E 2000, 61, 5171. [Google Scholar] [CrossRef]
- Cerruti-Sola, M.; Cipriani, P.; Pettini, M. On the clustering phase transition in self-gravitating N-body systems. Mon. Not. Roy. Astron. Soc. 2001, 328, 339. [Google Scholar] [CrossRef][Green Version]
- Krylov, N.S. Works on the Foundations of Statistical Physics; Princeton University Press: Princeton, NJ, USA, 1979. [Google Scholar]
- Abraham, R.; Marsden, J.E. Foundations of Mechanics; Addison-Wesley: Redwood City, CA, USA, 1987. [Google Scholar]
- Pettini, M. Geometrical hints for a nonperturbative approach to Hamiltonian dynamics. Phys. Rev. E 1993, 47, 828. [Google Scholar] [CrossRef]
- Casetti, L.; Pettini, M.; Cohen, E.G.D. Geometric approach to Hamiltonian dynamics and statistical mechanics. Phys. Rep. 2000, 337, 237–342. [Google Scholar] [CrossRef]
- Pettini, M. Geometry and Topology in Hamiltonian Dynamics and Statistical Mechanics; IAM Series n.33; Springer: New York, NY, USA, 2007. [Google Scholar]
- Eisenhart, L.P. Dynamical trajectories and geodesics. Ann. Math. 1928, 30, 591. [Google Scholar] [CrossRef]
- Lichnerowicz, A. Théories Rélativistes de la Gravitation et de l’Eléctromagnétisme; Masson: Paris, France, 1955. [Google Scholar]
- Cerruti-Sola, M.; Franzosi, R.; Pettini, M. Lyapunov exponents from geodesic spread in configuration space. Phys. Rev. E 1997, 56, 4872. [Google Scholar] [CrossRef]
- Gonzalez Leon, M.A.; Hernandez Pastora, J.L. On the Jacobi-metric stability criterion. In Proceedings of the XV International Workshop on Geometry and Physics, Puerto de la Cruz, Tenerife, Spain, 11–16 September 2006. [Google Scholar]
- Cuervo-Reyes, E.; Movassagh, R. Non-affine geometrization can lead to non-physical instabilities. J. Phys. A Math. Theor. 2015, 48, 075101. [Google Scholar] [CrossRef][Green Version]
- Cairano, L.D.; Gori, M.; Pettini, M. Coherent Riemannian-geometric description of Hamiltonian order and chaos with Jacobi metric. Chaos 2019, 29, 123134. [Google Scholar] [CrossRef] [PubMed]
- Hénon, H.; Heiles, C. The applicability of the third integral of motion. Astron. J. 1964, 69, 73. [Google Scholar] [CrossRef]
- Hadamard, J. Les surfaces à courbures opposées et leurs lignes géodésiques. J. Math. Pur. Appl. 1898, 4, 27. [Google Scholar]
- Hedlund, G.A. The dynamics of geodesic flows. Bull. Amer. Math. Soc. 1939, 45, 241. [Google Scholar] [CrossRef]
- Hopf, E. Complete transitivity and the ergodic principle. Proc. Natl. Acad. Sci. USA 1932, 18, 204. [Google Scholar] [CrossRef]
- Anosov, V.I. Geodesic flows on closed Riemannian manifolds of negative curvature. Proc. Steklov Math. Inst. 1967, 90, 3–210. [Google Scholar]
- MacKay, R.S.; Meiss, J.D. (Eds.) Hamiltonian Systems: A Reprint Selection; Adam Hilger: Bristol, UK, 1990. [Google Scholar]
- Arnold, V.I. Mathematical Methods of Classical Mechanics; Springer: Berlin/Heidelberg, Germany, 1978. [Google Scholar]
- Cerruti-Sola, M.; Pettini, M. Geometric description of chaos in two-degrees-of-freedom Hamiltonian systems. Phys. Rev. E 1996, 53, 179. [Google Scholar] [CrossRef]
- Casetti, L.; Clementi, C.; Pettini, M. Riemannian theory of Hamiltonian chaos and Lyapunov exponents. Phys. Rev. E 1996, 54, 5969. [Google Scholar] [CrossRef] [PubMed]
- van Kampen, N.G. Stochastic Differential Equations. Phys. Rep. 1976, 24, 171. [Google Scholar] [CrossRef]
- Hirsch, M.W. Differential Topology; Springer: New York, NY, USA, 1976. [Google Scholar]
- Milnor, J. Morse Theory; Annals of the Mathematics Studies; Princeton University Press: Princeton, NJ, USA, 1963; Volume 51. [Google Scholar]
- Morse, M.; Cairns, S.S. Critical Point Theory in Global Analysis and Differential Topology; Academic Press: New York, NY, USA, 1969. [Google Scholar]
- Nakahara, M. Geometry, Topology and Physics; Adam Hilger: Bristol, UK, 1991. [Google Scholar]
- Franzosi, R.; Pettini, M. Theorem on the origin of Phase Transitions. Phys. Rev. Lett. 2004, 92, 060601. [Google Scholar] [CrossRef] [PubMed]
- Franzosi, R.; Pettini, M.; Spinelli, L. Topology and Phase Transitions I. Preliminary results. Nucl. Phys. B 2007, 782, 189. [Google Scholar] [CrossRef]
- Kastner, M.; Mehta, D. Phase Transitions Detached from Stationary Points of the Energy Landscape. Phys. Rev. Lett. 2011, 107, 160602. [Google Scholar] [CrossRef]
- Gori, M.; Franzosi, R.; Pettini, M. Topological origin of phase transitions in the absence of critical points of the energy landscape. J. Stat. Mech. 2018, 2018, 093204. [Google Scholar] [CrossRef]
- Pettini, G.; Gori, M.; Franzosi, R.; Clementi, C.; Pettini, M. On the origin of phase transitions in the absence of symmetry-breaking. Physica A 2019, 516, 376. [Google Scholar] [CrossRef]
- Gori, M.; Franzosi, R.; Pettini, G.; Pettini, M. Topological Theory of Phase Transitions. J. Phys. A Math. Theor. 2022, 55, 37002. [Google Scholar] [CrossRef]
- Franzosi, R.; Pettini, M. Topology and Phase Transitions II. Theorem on a necessary relation. Nucl. Phys. B 2007, 782, 219. [Google Scholar] [CrossRef][Green Version]
- Cairano, L.D.; Gori, M.; Pettini, M. Topology and phase transitions: A first analytical step towards the definition of sufficient conditions. Entropy 2021, 23, 1414. [Google Scholar] [CrossRef]
- Chern, S.S.; Lashof, R.K. On the total curvature of immersed manifolds. Am. J. Math. 1957, 79, 306. [Google Scholar] [CrossRef]
- Chern, S.S.; Lashof, R.K. On the total curvature of immersed manifolds II. Michigan Math. J. 1958, 5, 5. [Google Scholar] [CrossRef]
- Pinkall, U. Inequalities of Willmore type for submanifolds. Math. Z. 1986, 193, 241. [Google Scholar] [CrossRef]
- Overholt, M. Fluctuation of sectional curvature for closed hypersurfaces. Rocky Mount. Math. 2002, 32, 385. [Google Scholar] [CrossRef]
- Cairano, L.D.; Capelli, R.; Bel-Hadj-Aissa, G.; Pettini, M. Topological origin of protein folding transition. Phys. Rev. E 2022, 106, 054134. [Google Scholar] [CrossRef]
- Clementi, C.; Nymeyer, H.; Onuchic, J.N. Topological and energetic factors: What determines the structural details of the transition state ensemble and “en-route” intermediates for protein folding? An investigation for small globular proteins. J. Mol. Biol. 2000, 298, 937. [Google Scholar] [CrossRef]
- Noel, J.K.; Levi, M.; Raghunathan, M.; Lammert, H.; Hayes, R.L.; Onuchic, J.N.; Whitford, P.C. SMOG 2: A versatile software package for generating structure based models. PLoS Comput. Biol. 2016, 12, e1004794. [Google Scholar] [CrossRef]
- Kogut, J. An introduction to lattice gauge theory and spin systems. Rev. Mod. Phys. 1979, 51, 659. [Google Scholar] [CrossRef]
- Elitzur, S. Impossibility of spontaneously breaking local symmetries. Phys. Rev. D 1975, 12, 3978. [Google Scholar] [CrossRef]
- Kramer, P.; Saraceno, M. Geometry of the time-dependent variational principle in quantum mechanics. In Group Theoretical Methods in Physics; Springer: New York, NY, USA, 1980; pp. 112–121. [Google Scholar]
- Kramer, P. A review of the time-dependent variational principle. J. Phys. Conf. Ser. 2008, 99, 012009. [Google Scholar] [CrossRef]
- Jauslin, H.-R.; Sugny, D. Dynamics of mixed classical-quantum systems, geometric quantization and coherent states. In Mathematical Horizons for Quantum Physics; Araki, H., Englert, B.-G., Kwek, L.-C., Suzuki, J., Eds.; IMS-NUS Lecture Notes Series; World Scientific: Singapore, 2010; Volume 20. [Google Scholar]
- Callaway, D.J.E.; Rahman, A. Lattice gauge theory in the microcanonical ensemble. Phys. Rev. D 1983, 28, 1506. [Google Scholar] [CrossRef]
- Cairano, L.D.; Gori, M.; Sarkis, M.; Tkatchenko, A. Detecting phase transitions in lattice gauge theories: Production and dissolution of topological defects in 4D compact electrodynamics. Phys. Rev. D 2024, in press. [CrossRef]
- Pradzynski, C.C.; Forck, R.M.; Zeuch, T.; Slavicek, P.; Buck, U. A fully size-resolved perspective on the crystallization of water clusters. Science 2012, 337, 1529. [Google Scholar] [CrossRef] [PubMed]
- Leggett, A.J. Bose–Einstein condensation in the alkali gases: Some fundamental concepts. Rev. Mod. Phys. 2001, 73, 307, Erratum in Rev. Mod. Phys. 2003, 75, 1083. [Google Scholar] [CrossRef]
- Lifshitz, I.M.; Grosberg, A.Y.; Khokhlov, A.R. Some problems of the statistical physics of polymer chains with volume interaction. Rev. Mod. Phys. 1978, 50, 683. [Google Scholar] [CrossRef]
- Dill, K.A.; Ozkan, S.B.; Shell, M.S.; Weikl, T.R. The protein folding problem. Annu. Rev. Biophys. 2008, 37, 289. [Google Scholar] [CrossRef]
- Qi, K.; Bachmann, M. Classification of phase transitions by microcanonical inflection-point analysis. Phys. Rev. Lett. 2018, 120, 180601. [Google Scholar] [CrossRef]
- Bachmann, M. Thermodynamics and Statistical Mechanics of Macromolecular Systems; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Mermin, N.D.; Wagner, H. Absence of ferromagnetism or antiferromagnetism in one- or two-dimensional isotropic Heisenberg models. Phys. Rev. Lett. 1966, 17, 1133. [Google Scholar] [CrossRef]
- Mermin, N.D. Crystalline Order in Two Dimensions. Phys. Rev. 1968, 176, 250. [Google Scholar] [CrossRef]
- Carlsson, G.; Gorham, J.; Kahle, M.; Mason, J. Computational topology for configuration spaces of hard disks. Phys. Rev. E 2012, 85, 011303. [Google Scholar] [CrossRef]
- Baryshnikov, Y.; Bubenik, P.; Kahle, M. Min-type Morse theory for configuration spaces of hard spheres. Int. Math. Res. Not. 2013, 2014, 2577. [Google Scholar] [CrossRef]
- Brody, D.C.; Hook, D.W.; Hughston, L.P. Quantum phase transitions without thermodynamic limits. Proc. R. Soc. A 2007, 463, 2021. [Google Scholar] [CrossRef]
- Buonsante, P.; Franzosi, R.; Smerzi, A. Phase transitions at high energy vindicate negative microcanonical temperature. Phys. Rev. E 2017, 95, 052135. [Google Scholar] [CrossRef] [PubMed]
- Volovik, G.E. Quantum Phase Transitions from Topology in Momentum Space Quantum Analogues: From Phase Transitions to Black Holes and Cosmology; Springer: Berlin/Heidelberg, Germany, 2007; pp. 31–73. [Google Scholar]
- Angelani, L.; Leonardo, R.D.; Parisi, G.; Ruocco, G. Topological description of the aging dynamics in simple glasses. Phys. Rev. Lett. 2001, 87, 055502. [Google Scholar] [CrossRef] [PubMed]
- Debenedetti, P.G.; Stillinger, F.H. Supercooled liquids and the glass transition Nature. Nature 2001, 410, 259. [Google Scholar] [CrossRef]
- Risau-Gusman, S.; Ribeiro-Teixeira, A.C.; Stariolo, D.A. Topology, phase transitions, and the spherical model. Phys. Rev. Lett. 2005, 95, 145702. [Google Scholar] [CrossRef]
- Santos, F.A.N.; da Silva, L.C.B.; Coutinho-Filho, M.D. Topological approach to microcanonical thermodynamics and phase transition of interacting classical spins. J. Stat. Mech. 2017, 2017, 013202. [Google Scholar] [CrossRef][Green Version]
- Garanin, D.A.; Schilling, R.; Scala, A. Saddle index properties, singular topology, and its relation to thermodynamic singularities for a φ4 mean-field model. Phys. Rev. E 2004, 70, 036125. [Google Scholar] [CrossRef]
- Cimasoni, D.; Delabays, R. The topological hypothesis for discrete spin models. J. Stat. Mech. 2019, 2019, 033216. [Google Scholar] [CrossRef]
- Grinza, P.; Mossa, A. Topological origin of the phase transition in a model of DNA denaturation. Phys. Rev. Lett. 2004, 92, 158102. [Google Scholar] [CrossRef]
- Becker, O.M.; Karplus, M. The topology of multidimensional potential energy surfaces: Theory and application to peptide structure and kinetics. J. Chem. Phys. 1997, 106, 1495. [Google Scholar] [CrossRef]
- Brooks, C.L.; Onuchic, J.N.; Wales, D.J. Taking a walk on a landscape. Science 2001, 293, 612. [Google Scholar] [CrossRef] [PubMed]
- Wales, D.J. A microscopic basis for the global appearance of energy landscapes. Science 2001, 293, 2067. [Google Scholar] [CrossRef] [PubMed]
- Santos, F.A.N.; Raposo, E.P.; Coutinho-Filho, M.D.; Copelli, M.; Stam, C.J.; Douw, L. Topological phase transitions in functional brain networks. Phys. Rev. E 2019, 100, 032414. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).