
A Survey on Semantic Communications in Internet of Vehicles



Abstract
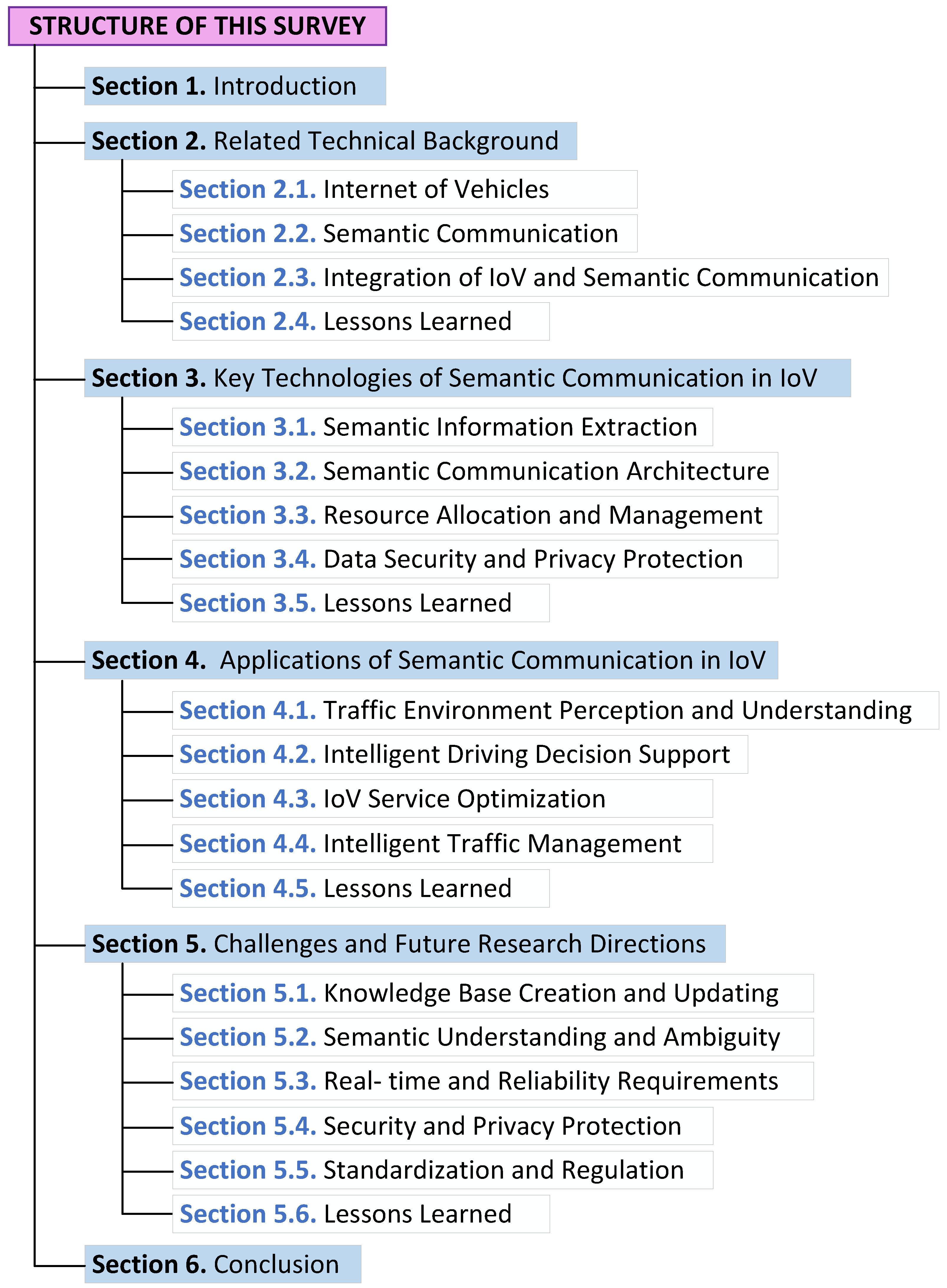
:1. Introduction
2. Related Technical Background
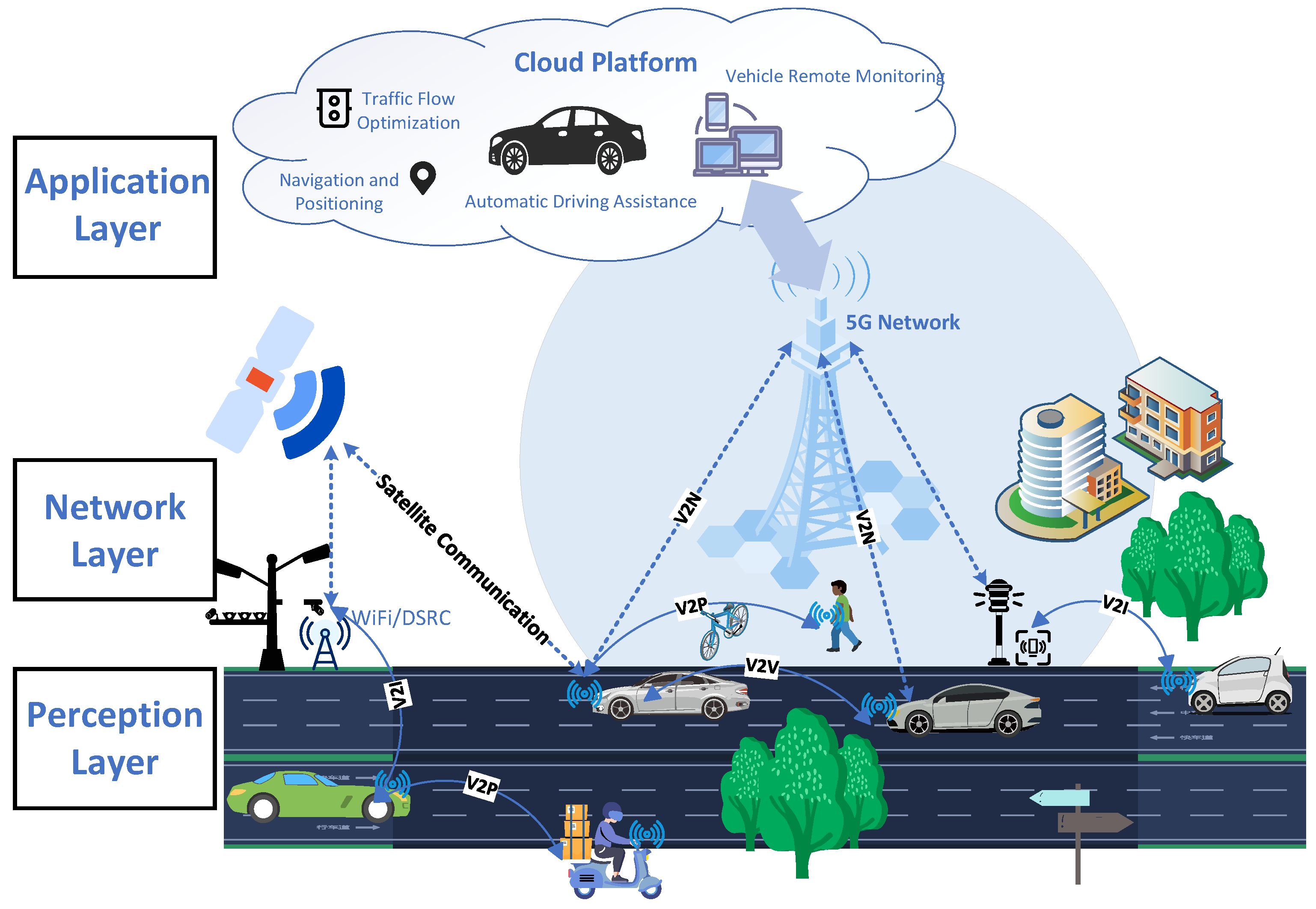
2.1. Internet of Vehicles
- Vehicle-to-Vehicle (V2V) [54]: Vehicles directly exchange information with each other, such as speed, direction, and emergency braking signals. This mode enables vehicles to anticipate potential collision risks in advance, thereby enhancing driving safety.
- Vehicle-to-Infrastructure (V2I) [54]: Vehicles communicate with roadside units, such as traffic lights and road sensors, to obtain information on traffic conditions and traffic signal status. V2I communication helps optimize traffic flow and reduce congestion.
- Vehicle-to-Pedestrian (V2P) [55]: Vehicles interact with pedestrian devices, such as smartphones and smartwatches, to alert pedestrians to the approach of vehicles or to provide vehicles with pedestrian location information.
- Vehicle-to-Roadside Unit (V2R) [56]: Vehicles communicate with roadside units (RSUs), which are devices installed along roadsides to provide local traffic information, weather conditions, and other relevant data.
- Vehicle-to-Device (V2D) [57]: Vehicles communicate with various mobile devices to offer personalized services, such as vehicle status monitoring and remote control.
- Vehicle-to-Grid (V2G) [58]: Vehicles interact with the power grid, functioning as mobile energy storage units that can exchange energy with the grid. For example, vehicles can charge during periods of low grid load and discharge during periods of high grid load, thereby improving the stability and efficiency of the power grid.
2.1.1. IoV Architectures
2.1.2. Communication Technologies
- Vehicular communication: In VANETs, On-Board Units (OBUs) and roadside units (RSUs) often use DSRC for communication. For example, vehicles transmit collected data such as speed, acceleration, and fuel levels to nearby RSUs or other vehicles via OBUs based on the IEEE 802.11p standard. RSUs also use DSRC to communicate with OBUs, enabling functions such as information forwarding, local communication, and road safety information provision. Continuous Air-interface for Long and Medium range (CALM) is another important vehicular communication standard in IoV, providing specifications and support for communication, ensuring compatibility and stability between vehicles and other devices.
- Cellular mobile communication: Vehicles can communicate with other networks through 4G/LTE, WiMax, and other cellular network technologies, enabling V2I connectivity, thereby extending communication range and accessing more comprehensive traffic and environmental information [75,76]. Among these, 5G NR V2X, as a new-generation cellular IoV technology, offers ultra-low latency, high reliability, and high data transmission rates, significantly enhancing the performance and safety of IoV applications. It supports advanced V2X scenarios such as platooning, remote driving, and sensor extension. Satellite communication also plays a role in special scenarios or remote areas, ensuring vehicle connectivity. For instance, in mountainous regions or areas with poor signal coverage, satellite communication can maintain the vehicle’s connection with the outside world.
- Short-range static communication: This includes technologies such as Zigbee, Bluetooth, and Wi-Fi. Zigbee can be used for short-range communication between vehicles and sensors, enabling environmental perception and data collection, such as vehicle status monitoring and environmental parameter detection. Bluetooth is primarily used for connecting vehicles with personal devices (e.g., smartphones, tablets, etc.), facilitating device interaction and information sharing within the vehicle. Wi-Fi provides high-speed network access for vehicles in specific areas (e.g., parking lots, service stations, etc.), meeting the demand for large data transmission and real-time information acquisition. For example, vehicles in parking lots can download maps or access service information via Wi-Fi.
2.2. Semantic Communication
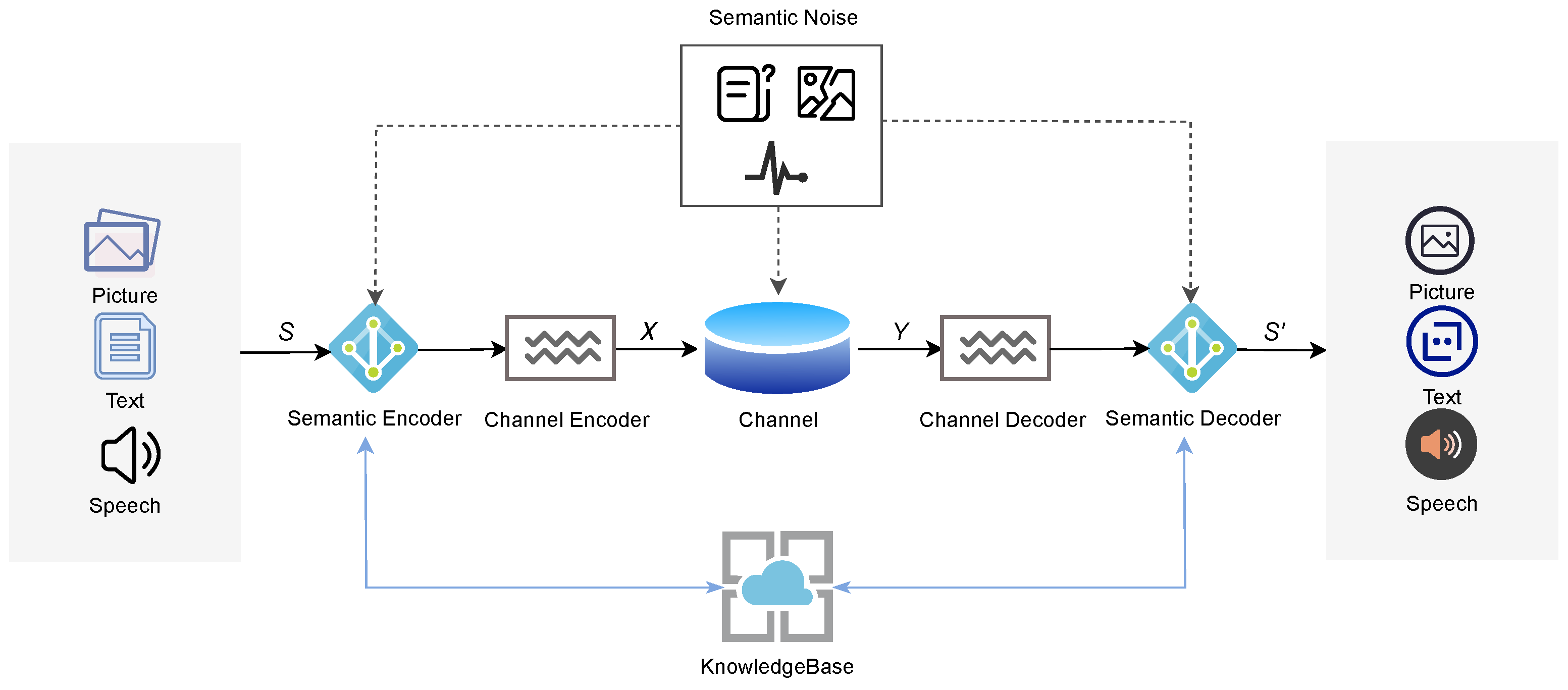
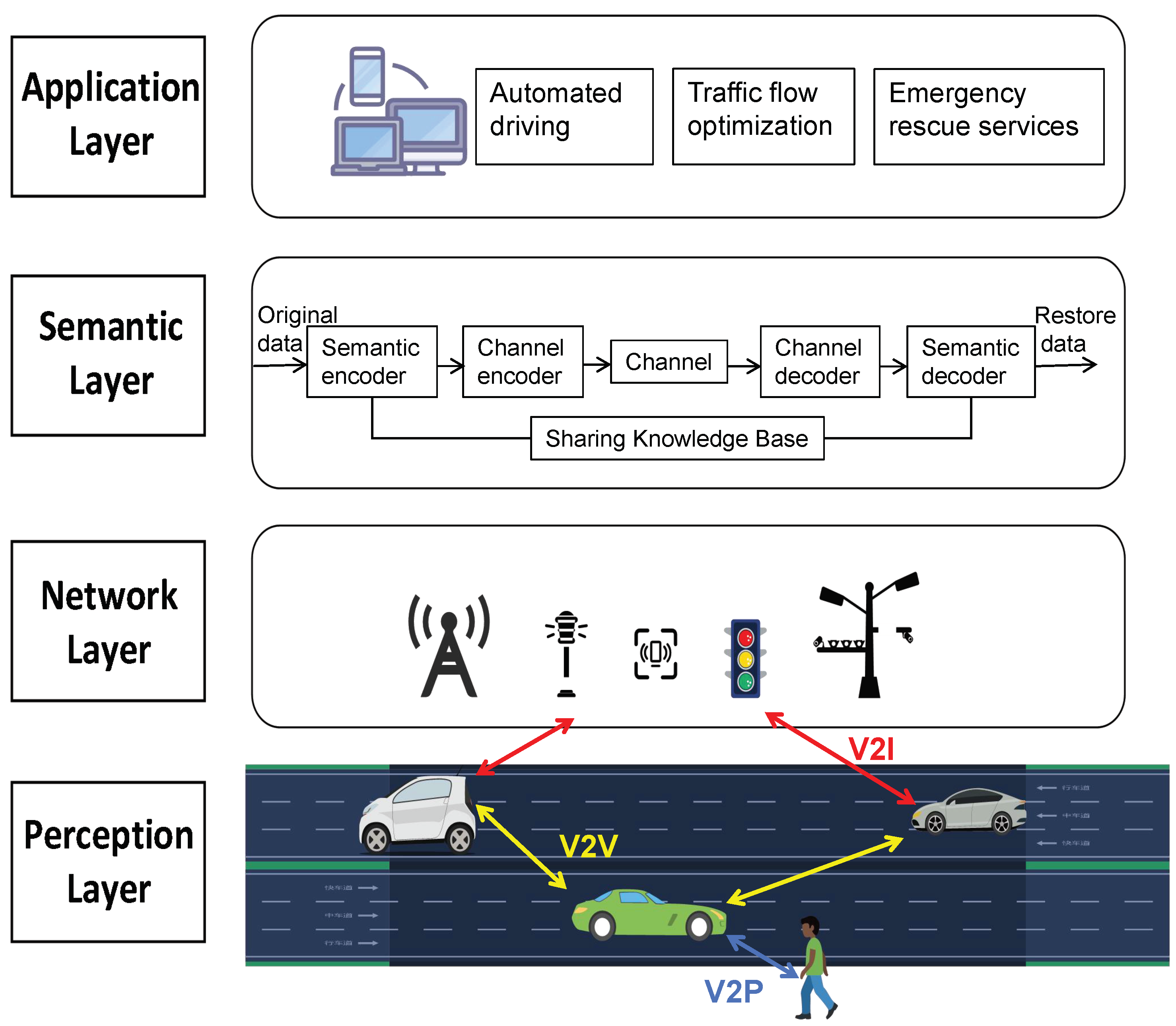
2.2.1. Semantic Communication System Architectures
- Semantic encoder: The semantic encoder accurately extracts semantic information from the source message and effectively compresses it through a series of complex algorithms and techniques.
- Channel encoder: The channel encoder encodes and modulates the semantic features processed by the semantic encoder and maps the semantic features into a signal form suitable for transmission over the channel.
- Channel decoder: The channel decoder uses a decoding algorithm corresponding to the channel encoder to restore the encoded semantic features from the received signal.
- Semantic decoder: The semantic decoder converts the signal output from the channel decoder into a format that the user can understand.
- Knowledge base: The knowledge base provides the semantic understanding basis for the encoder and decoder. It further analyzes and transforms the recovered semantic features based on pre-established semantic rules and the knowledge system within the knowledge base. Depending on the scope of knowledge sharing and the user, it can be divided into local knowledge bases and public knowledge bases.
- Semantic noise: Semantic noise is an interfering factor that leads to wrong recognition and interpretation of semantic information in the whole process of semantic communication. Semantic noise includes semantic and physical channel noise, such as text semantic ambiguity, image antagonistic samples, and so on.
2.2.2. Semantic Communication Types
2.2.3. Semantic Metrics
2.3. Integration of IoV and Semantic Communication
2.4. Lessons Learned
3. Key Technologies of Semantic Communication in IoV
- Semantic accuracy: This measures the precision of semantic information extraction and reconstruction. It includes general metrics (e.g., BLEU for text, PSNR/SSIM for images, etc.) and task-specific metrics (e.g., IoU for object detection, F1-score for classification, etc.).
- End-to-end latency: This defines the total time from data generation to application reception (encoding + transmission + decoding). This directly impacts real-time-sensitive scenarios like V2V collision warnings.
- Resource efficiency: This includes computational overhead (FLOPs/memory usage) and bandwidth efficiency (data compression ratio), determining feasibility for edge device deployment.
3.1. Semantic Information Extraction
3.1.1. Single-Modal Extraction
3.1.2. Multimodal Fusion
3.2. Semantic Communication Architecture
3.2.1. Multiuser Collaboration and Multitask Driving
3.2.2. Oriented to Image Transmission
3.2.3. Generative AI-Based Semantic Communication Architectures
3.2.4. Other Architectures
3.3. Resource Allocation and Management
3.3.1. Reinforcement Learning-Based Resource Allocation Methods
3.3.2. Optimization Theory-Based Resource Allocation Methods
3.3.3. Federated Learning-Based Resource Allocation Methods
3.4. Data Security and Privacy Protection
3.4.1. Security Risk Analysis
- Adversarial attacks: Existing research shows that semantic communication systems are significantly vulnerable to adversarial attacks. Tiny perturbations generated based on algorithms such as Auto-PGD, FSGM, and DeepFool can lead to a substantial decline in the accuracy of semantic segmentation [110]. Of particular concern is the new type of covert attack mechanism. For example, the Covert Semantic Backdoor Attack (CSBA) can achieve the directional elimination of target semantics (such as traffic signs) without explicit triggers by analyzing the self-contained semantic features of the transmitted images [111]. Experiments show that even under high SNRs, the CSBA can still successfully remove the target semantics, and the restored image is visually indistinguishable from the original image. In addition, the Semantic Noise Attack (SNA) can inject semantic-level interference into the transmitted data, causing cascading error propagation in the encoding and decoding stages and leading to the failure of system decision making [112].
- Privacy leakage risk: The deep correlation characteristics of semantic information enable attackers to reverse-derive users’ sensitive data through multidimensional semantic analysis. For example, by analyzing the spatio-temporal patterns of vehicle trajectory semantics, users’ resident areas and travel patterns can be inferred. Continuous monitoring of driving intention semantics may expose confidential information such as commercial transportation routes.
- Man-in-the-middle attack threat: In V2V/V2I communication links, attackers can take advantage of the vulnerabilities of semantic protocols to conduct data eavesdropping and tampering. Typical attack scenarios include forging emergency braking commands, tampering with the semantic state of traffic lights, and hijacking path planning semantic data to induce vehicles to enter a preset area. Since such attacks directly operate on semantic layer information, traditional encryption mechanisms are difficult to effectively detect them.
- Model poisoning attack: During the construction of a distributed semantic knowledge base, malicious vehicles can carry out covert poisoning by uploading contaminated data (such as distorted semantic features of traffic signs). More seriously, the poisoning attack may trigger systematic deviations in the semantic rule system, resulting in the failure of the Vehicle-to-Everything (V2X) collaborative decision-making mechanism.
3.4.2. Countermeasures
- Semantic information encryption: Semantic information encryption is an important means to protect the confidentiality of semantic data in the Internet of Vehicles. By designing lightweight semantic-aware encryption algorithms, such as semantic feature obfuscation technology based on lattice cryptography, end-to-end confidentiality can be achieved while ensuring semantic decodability. This encryption method can effectively prevent data from being illegally stolen and tampered with during data transmission and storage, ensuring the security of semantic information.
- Federated learning and differential privacy: Federated learning is a distributed machine learning framework that enables distributed training of semantic models without sharing the original data. Combined with differential privacy technology, by adding controllable noise to semantic features, the leakage of original data can be further prevented. This combined approach can not only protect data privacy but also improve the robustness and generalization ability of semantic models. For example, refs. [37,38] have elaborated on the application of federated learning in semantic communication of the Internet of Vehicles, demonstrating its remarkable effects in privacy protection and model performance improvement.
- Blockchain and edge intelligence: The introduction of blockchain technology provides new ideas for data security and privacy protection in semantic communication of the Internet of Vehicles. Using blockchain to record the update operations of the semantic knowledge base can ensure the consistency and immutability of semantic rules. For example, the blockchain sharding technology proposed in [27] reduces the verification delay of the knowledge base by dividing the knowledge base into multiple small pieces for verification while effectively resisting tampering attacks. In addition, the application of edge intelligence also provides strong support for privacy protection. Ref. [14] achieved a balance between semantic understanding and vehicle privacy by building shared and private knowledge bases on edge servers. The shared library stores the background knowledge of autonomous driving on the edge server, while the private library stores the unique information of vehicles. The private library can be transmitted to the edge server according to the travel plan and updated by the vehicle itself when updated, and the edge server aggregates multisource information to update the shared library. This hierarchical architecture allows vehicles to only update and maintain their own private knowledge bases without uploading all data to the shared knowledge base, thus greatly reducing the risk of data leakage.
- Adversarial sample detection: Adversarial sample detection is an important technology to deal with potential attacks in semantic communication of the Internet of Vehicles. The semantic anomaly detection module constructed based on the generative adversarial network (GAN) can identify adversarial semantic features in real time. Ref. [112] proposed a defense mechanism based on Semantic Distance Minimization (SDM). SDM generates adversarial samples during the training process and optimizes the model to enable it to extract correct semantic information from adversarial samples. This method not only improves the model’s robustness against adversarial attacks but also enhances the model’s semantic understanding ability to a certain extent, ensuring the accuracy and reliability of semantic communication.
3.5. Lessons Learned
4. Applications of Semantic Communication in IoV
4.1. Traffic Environment Perception and Understanding
4.2. Intelligent Driving Decision Support
4.3. IoV Service Optimization
4.4. Intelligent Traffic Management
4.5. Lessons Learned
5. Challenges and Future Research Directions
5.1. Knowledge Base Creation and Updating
5.2. Semantic Understanding and Ambiguity
5.3. Real-Time and Reliability Requirements
5.4. Security and Privacy Protection
5.5. Standardization and Regulation
5.6. Lessons Learned
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kaiwartya, O.; Abdullah, A.H.; Cao, Y.; Altameem, A.; Prasad, M.; Lin, C.T.; Liu, X. Internet of vehicles: Motivation, layered architecture, network model, challenges, and future aspects. IEEE Access 2016, 4, 5356–5373. [Google Scholar] [CrossRef]
- Luo, X.; Chen, H.H.; Guo, Q. Semantic communications: Overview, open issues, and future research directions. IEEE Wirel. Commun. 2022, 29, 210–219. [Google Scholar] [CrossRef]
- Gündüz, D.; Qin, Z.; Aguerri, I.E.; Dhillon, H.S.; Yang, Z.; Yener, A.; Wong, K.K.; Chae, C.B. Beyond transmitting bits: Context, semantics, and task-oriented communications. IEEE J. Sel. Areas Commun. 2022, 41, 5–41. [Google Scholar] [CrossRef]
- Shi, G.; Xiao, Y.; Li, Y.; Gao, D.; Xie, X. Semantic communication networking for the intelligence of everything. Chin. J. Internet Things 2021, 5, 26–36. [Google Scholar]
- Duan, W.; Gu, J.; Wen, M.; Zhang, G.; Ji, Y.; Mumtaz, S. Emerging technologies for 5G-IoV networks: Applications, trends and opportunities. IEEE Netw. 2020, 34, 283–289. [Google Scholar] [CrossRef]
- Maksimychev, O.; Matiukhina, E.; Ostroukh, A.; Vasiliev, Y. Connected Vehicle Remote Diagnostic System. In Proceedings of the 2021 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 16–18 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Ang, L.M.; Seng, K.P.; Ijemaru, G.K.; Zungeru, A.M. Deployment of IoV for smart cities: Applications, architecture, and challenges. IEEE Access 2018, 7, 6473–6492. [Google Scholar] [CrossRef]
- Audebert, N.; Le Saux, B.; Lefèvre, S. Segment-before-detect: Vehicle detection and classification through semantic segmentation of aerial images. Remote Sens. 2017, 9, 368. [Google Scholar] [CrossRef]
- Dewangan, D.K.; Sahu, S.P. Road Detection Using Semantic Segmentation-Based Convolutional Neural Network for Intelligent Vehicle System. In Data Engineering and Communication Technology; Reddy, K.A., Devi, B.R., George, B., Raju, K.S., Eds.; Springer: Singapore, 2021; pp. 629–637. [Google Scholar]
- Löhdefink, J.; Bär, A.; Schmidt, N.M.; Hüger, F.; Schlicht, P.; Fingscheidt, T. Focussing Learned Image Compression to Semantic Classes for V2X Applications. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 1641–1648. [Google Scholar] [CrossRef]
- Xiao, Z.; Mo, Z.; Jiang, K.; Yang, D. Multimedia Fusion at Semantic Level in Vehicle Cooperactive Perception. In Proceedings of the 2018 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), San Diego, CA, USA, 23–27 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Pan, Q.; Tong, H.; Lv, J.; Luo, T.; Zhang, Z.; Yin, C.; Li, J. Image Segmentation Semantic Communication over Internet of Vehicles. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Gimenez-Guzman, J.M.; Leyva-Mayorga, I.; Popovski, P. Semantic V2X Communications for Image Transmission in 6G Systems. IEEE Netw. 2024, 38, 48–54. [Google Scholar] [CrossRef]
- Feng, Y.; Shen, H.; Shan, Z.; Yang, Q.; Shi, X. Semantic Communication for Edge Intelligence Enabled Autonomous Driving System. arXiv 2024, arXiv:2406.10606. [Google Scholar] [CrossRef]
- Lu, J.; Yang, W.; Xiong, Z.; Xing, C.; Tafazolli, R.; Quek, T.Q.; Debbah, M. Generative AI-Enhanced Multi-Modal Semantic Communication in Internet of Vehicles: System Design and Methodologies. arXiv 2024, arXiv:2409.15642. [Google Scholar]
- Xu, W.; Zhang, Y.; Wang, F.; Qin, Z.; Liu, C.; Zhang, P. Semantic Communication for the Internet of Vehicles: A Multiuser Cooperative Approach. IEEE Veh. Technol. Mag. 2023, 18, 100–109. [Google Scholar] [CrossRef]
- Eldeeb, E.; Shehab, M.; Alves, H. A Multi-Task Oriented Semantic Communication Framework for Autonomous Vehicles. arXiv 2024, arXiv:2403.12997. [Google Scholar] [CrossRef]
- Hu, J.; Wang, F.; Xu, W.; Gao, H.; Zhang, P. SemHARQ: Semantic-Aware HARQ for Multi-task Semantic Communications. arXiv 2024, arXiv:2404.08490. [Google Scholar]
- Lv, J.; Tong, H.; Pan, Q.; Zhang, Z.; He, X.; Luo, T.; Yin, C. Importance-Aware Image Segmentation-based Semantic Communication for Autonomous Driving. arXiv 2024, arXiv:2401.10153. [Google Scholar]
- Ribouh, S.; Hadid, A. SEECAD: Semantic End-to-End Communication for Autonomous Driving. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju Island, Republic of Korea, 2–5 June 2024; pp. 1808–1813. [Google Scholar] [CrossRef]
- Wan, Z.; Liu, S.; Xu, Z.; Ni, W.; Ye, S.; Wang, F. A Semantic Communication Approach for Multiscene Target Detection in Intelligent Vehicle Networks. IEEE Internet Things J. 2024, 11, 35877–35890. [Google Scholar] [CrossRef]
- Wan, Z.; Liu, S.; Xu, Z.; Zou, J. A Low Latency Routing for Telematics Combined with Image Semantic Communication. In Proceedings of the 2023 IEEE 3rd International Conference on Software Engineering and Artificial Intelligence (SEAI), Xiamen, China, 16–18 June 2023; pp. 229–234. [Google Scholar] [CrossRef]
- Feng, H.; Yang, Y.; Han, Z. Scalable AI Generative Content for Vehicular Network Semantic Communication. arXiv 2023, arXiv:2311.13782. [Google Scholar]
- Zhang, R.; Xiong, K.; Du, H.; Niyato, D.; Kang, J.; Shen, X.; Poor, H.V. Generative AI-Enabled Vehicular Networks: Fundamentals, Framework, and Case Study. IEEE Netw. 2024, 38, 259–267. [Google Scholar] [CrossRef]
- Raha, A.D.; Munir, M.S.; Adhikary, A.; Qiao, Y.; Hong, C.S. Generative ai-driven semantic communication framework for nextg wireless network. arXiv 2023, arXiv:2310.09021. [Google Scholar]
- Yang, W.; Xiong, Z.; Yuan, Y.; Jiang, W.; Quek, T.Q.; Debbah, M. Agent-driven Generative Semantic Communication with Cross-Modality and Prediction. IEEE Trans. Wirel. Commun. 2024, 24, 2233–2248. [Google Scholar] [CrossRef]
- Lin, Y.; Murase, T.; Ji, Y.; Bao, W.; Zhong, L.; Li, J. Blockchain-based knowledge-aware semantic communications for remote driving image transmission. Digit. Commun. Netw. 2024, in press. [CrossRef]
- Yang, W.; Chi, X.; Zhao, L.; Xiong, Z.; Jiang, W. Task-Driven Semantic-Aware Green Cooperative Transmission Strategy for Vehicular Networks. IEEE Trans. Commun. 2023, 71, 5783–5798. [Google Scholar] [CrossRef]
- Wang, Z.; Leng, S.; Zhang, H.; Yuen, C. Deep Semantic Communication for Knowledge Sharing in Internet of Vehicles. IEEE Internet Things J. 2025. [Google Scholar] [CrossRef]
- Shao, Z.; Wu, Q.; Fan, P.; Cheng, N.; Fan, Q.; Wang, J. Semantic-Aware Resource Allocation Based on Deep Reinforcement Learning for 5G-V2X HetNets. IEEE Commun. Lett. 2024, 28, 2452–2456. [Google Scholar] [CrossRef]
- Shao, Z.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Wang, J.; Ben Letaief, K. Semantic-Aware Spectrum Sharing in Internet of Vehicles Based on Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 38521–38536. [Google Scholar] [CrossRef]
- Shao, Z.; Wu, Q.; Fan, P.; Wang, K.; Fan, Q.; Chen, W.; Letaief, K.B. Semantic-Aware Resource Management for C-V2X Platooning via Multi-Agent Reinforcement Learning. arXiv 2024, arXiv:2411.04672. [Google Scholar]
- Zhu, M.; Feng, C.; Chen, J.; Guo, C.; Gao, X. Video Semantics based Resource Allocation Algorithm for Spectrum Multiplexing Scenarios in Vehicular Networks. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Xiamen, China, 28–30 July 2021; pp. 31–36. [Google Scholar] [CrossRef]
- Su, J.; Liu, Z.; Xie, Y.a.; Ma, K.; Du, H.; Kang, J.; Niyato, D. Semantic Communication-Based Dynamic Resource Allocation in D2D Vehicular Networks. IEEE Trans. Veh. Technol. 2023, 72, 10784–10796. [Google Scholar] [CrossRef]
- Ma, X.; Yang, X. V2X Wireless Resource Optimization for Vehicle Road Collaboration in Vehicle Platoons. In Proceedings of the 2024 IEEE/CIC International Conference on Communications in China (ICCC), Hangzhou, China, 7–9 August 2024; pp. 203–207. [Google Scholar] [CrossRef]
- Ng, W.C.; Du, H.; Lim, W.Y.B.; Xiong, Z.; Niyato, D.; Miao, C. Stochastic Resource Allocation for Semantic Communication-Aided Virtual Transportation Networks in the Metaverse. In Proceedings of the 2024 IEEE Wireless Communications and Networking Conference (WCNC), Dubai, United Arab Emirates, 21–24 April 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Zheng, G.; Ni, Q.; Navaie, K.; Pervaiz, H.; Min, G.; Kaushik, A.; Zarakovitis, C. Mobility-Aware Split-Federated with Transfer Learning for Vehicular Semantic Communication Networks. IEEE Internet Things J. 2024, 11, 17237–17248. [Google Scholar] [CrossRef]
- Liu, J.; Lu, Y.; Wu, H.; Dai, Y. Efficient Resource Allocation and Semantic Extraction for Federated Learning Empowered Vehicular Semantic Communication. In Proceedings of the 2023 IEEE 98th Vehicular Technology Conference (VTC2023-Fall), Hong Kong, China, 10–13 October 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Imran, S.; Charan, G.; Alkhateeb, A. Environment Semantic Communication: Enabling Distributed Sensing Aided Networks. arXiv 2024, arXiv:2402.14766. [Google Scholar] [CrossRef]
- Sheng, Y.; Liang, L.; Ye, H.; Jin, S.; Li, G.Y. Semantic Communication for Cooperative Perception using HARQ. arXiv 2024, arXiv:2409.09042. [Google Scholar]
- Figetakis, E.; Bello, Y.; Refaey, A.; Shami, A. Decentralized Semantic Traffic Control in AVs Using RL and DQN for Dynamic Roadblocks. In Proceedings of the ICC 2024—IEEE International Conference on Communications, Denver, CO, USA, 9–13 June 2024; pp. 5449–5454. [Google Scholar] [CrossRef]
- Deb Raha, A.; Shirajum Munir, M.; Adhikary, A.; Qiao, Y.; Park, S.B.; Seon Hong, C. An Artificial Intelligent-Driven Semantic Communication Framework for Connected Autonomous Vehicular Network. In Proceedings of the 2023 International Conference on Information Networking (ICOIN), Bangkok, Thailand, 11–14 January 2023; pp. 352–357. [Google Scholar] [CrossRef]
- Xia, L.; Sun, Y.; Niyato, D.; Feng, D.; Feng, L.; Imran, M.A. xURLLC-Aware Service Provisioning in Vehicular Networks: A Semantic Communication Perspective. IEEE Trans. Wirel. Commun. 2024, 23, 4475–4488. [Google Scholar] [CrossRef]
- Liu, X.; Sun, Y.; Wang, Z.; You, L.; Pan, H.; Wang, F.; Cui, S. Receiver-Centric Generative Semantic Communications. arXiv 2024, arXiv:2411.03127. Available online: http://arxiv.org/abs/2411.03127 (accessed on 25 February 2025).
- Tang, Y.; Zhou, N.; Yu, Q.; Wu, D.; Hou, C.; Tao, G.; Chen, M. Intelligent Fabric Enabled 6G Semantic Communication System for In-Cabin Scenarios. IEEE Trans. Intell. Transp. Syst. 2023, 24, 1153–1162. [Google Scholar] [CrossRef]
- Kadam, S.; Kim, D.I. Semantic Communication-Empowered Vehicle Count Prediction for Traffic Management. In Proceedings of the 2024 IEEE Wireless Communications and Networking Conference (WCNC), Dubai, United Arab Emirates, 21–24 April 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Hu, J.; Wang, F.; Xu, W.; Gao, H.; Zhang, P. Scalable Multi-Task Semantic Communication System with Feature Importance Ranking. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Zeng, Y.; He, X.; Chen, X.; Tong, H.; Yang, Z.; Guo, Y.; Hao, J. DMCE: Diffusion Model Channel Enhancer for Multi-User Semantic Communication Systems. arXiv 2024, arXiv:2401.16017. [Google Scholar]
- Sharif, S.; Khandaker, F.; Ejaz, W. Semantic Communication: Implication for Resource Optimization in 6G Networks. In Proceedings of the 2024 IEEE International Conference on Advanced Telecommunication and Networking Technologies (ATNT), Johor Bahru, Malaysia, 9–10 September 2024; Volume 1, pp. 1–4. [Google Scholar] [CrossRef]
- Bhardwaj, I.; Khara, S. Research trends in Architecture, Security, Services and Applications of Internet of Vehicles (IOV). In Proceedings of the 2018 International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 28–29 September 2018; pp. 91–95. [Google Scholar] [CrossRef]
- Sharma, S.; Kaushik, B. A survey on internet of vehicles: Applications, security issues & solutions. Veh. Commun. 2019, 20, 100182. [Google Scholar]
- Wu, Q.; Wang, W.; Fan, P.; Fan, Q.; Zhu, H.; Letaief, K.B. Cooperative Edge Caching Based on Elastic Federated and Multi-Agent Deep Reinforcement Learning in Next-Generation Networks. IEEE Trans. Netw. Serv. Manag. 2024, 21, 4179–4196. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, W.; Wu, Q.; Fan, P.; Fan, Q.; Wang, J.; Letaief, K.B. Distributed Deep Reinforcement Learning Based Gradient Quantization for Federated Learning Enabled Vehicle Edge Computing. IEEE Internet Things J. 2025, 12, 4899–4913. [Google Scholar] [CrossRef]
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular Ad Hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392. [Google Scholar] [CrossRef]
- Tahmasbi-Sarvestani, A.; Mahjoub, H.N.; Fallah, Y.P.; Moradi-Pari, E.; Abuchaar, O. Implementation and evaluation of a cooperative vehicle-to-pedestrian safety application. IEEE Intell. Transp. Syst. Mag. 2017, 9, 62–75. [Google Scholar] [CrossRef]
- Wu, C.; Yoshinaga, T.; Ji, Y.; Zhang, Y. Computational intelligence inspired data delivery for vehicle-to-roadside communications. IEEE Trans. Veh. Technol. 2018, 67, 12038–12048. [Google Scholar] [CrossRef]
- Jomaa, D.; Yella, S.; Dougherty, M. A comparative study between vehicle activated signs and speed indicator devices. Transp. Res. Procedia 2017, 22, 115–123. [Google Scholar] [CrossRef]
- Endo, M.; Tanaka, K. Evaluation of Storage Capacity of Electric Vehicles for Vehicle to Grid Considering Driver’s Perspective. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Sadiku, M.N.; Tembely, M.; Musa, S.M. Internet of vehicles: An introduction. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2018, 8, 11. [Google Scholar] [CrossRef]
- Agbaje, P.; Anjum, A.; Mitra, A.; Oseghale, E.; Bloom, G.; Olufowobi, H. Survey of Interoperability Challenges in the Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22838–22861. [Google Scholar] [CrossRef]
- Panigrahy, S.K.; Emany, H. A survey and tutorial on network optimization for intelligent transport system using the internet of vehicles. Sensors 2023, 23, 555. [Google Scholar] [CrossRef] [PubMed]
- Yang, F.; Li, J.; Lei, T.; Wang, S. Architecture and Key Technologies for Internet of Vehicles: A Survey. J. Commun. Inf. Netw. 2017, 2, 1–17. [Google Scholar] [CrossRef]
- Liu, K.; Xu, X.; Chen, M.; Liu, B.; Wu, L.; Lee, V.C.S. A Hierarchical Architecture for the Future Internet of Vehicles. IEEE Commun. Mag. 2019, 57, 41–47. [Google Scholar] [CrossRef]
- Contreras-Castillo, J.; Zeadally, S.; Guerrero Ibáñez, J.A. A seven-layered model architecture for Internet of Vehicles. J. Inf. Telecommun. 2017, 1, 4–22. [Google Scholar] [CrossRef]
- Contreras-Castillo, J.; Zeadally, S.; Guerrero-Ibañez, J.A. Internet of Vehicles: Architecture, Protocols, and Security. IEEE Internet Things J. 2018, 5, 3701–3709. [Google Scholar] [CrossRef]
- Yang, F.; Wang, S.; Li, J.; Liu, Z.; Sun, Q. An overview of Internet of Vehicles. China Commun. 2014, 11, 1–15. [Google Scholar] [CrossRef]
- Alnasser, A.; Sun, H.; Jiang, J. Cyber security challenges and solutions for V2X communications: A survey. Comput. Netw. 2019, 151, 52–67. [Google Scholar] [CrossRef]
- Taslimasa, H.; Dadkhah, S.; Neto, E.C.P.; Xiong, P.; Ray, S.; Ghorbani, A.A. Security issues in Internet of Vehicles (IoV): A comprehensive survey. Internet Things 2023, 22, 100809. [Google Scholar] [CrossRef]
- Guo, J.; Bilal, M.; Qiu, Y.; Qian, C.; Xu, X.; Raymond Choo, K.K. Survey on digital twins for Internet of Vehicles: Fundamentals, challenges, and opportunities. Digit. Commun. Netw. 2024, 10, 237–247. [Google Scholar] [CrossRef]
- Wan, J.; Zhang, D.; Zhao, S.; Yang, L.T.; Lloret, J. Context-aware vehicular cyber-physical systems with cloud support: Architecture, challenges, and solutions. IEEE Commun. Mag. 2014, 52, 106–113. [Google Scholar] [CrossRef]
- Ji, B.; Zhang, X.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the Internet of Vehicles: Network Architectures and Applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Ji, M.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Wang, J.; Letaief, K.B. Graph Neural Networks and Deep Reinforcement Learning Based Resource Allocation for V2X Communications. IEEE Internet Things J. 2025, 12, 3613–3628. [Google Scholar] [CrossRef]
- Qi, K.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Letaief, K.B. Reconfigurable Intelligent Surface Aided Vehicular Edge Computing: Joint Phase-Shift Optimization and Multi-User Power Allocation. IEEE Internet Things J. 2025, 12, 764–778. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, W.; Chen, J.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Opportunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Wang, X.; Wu, Q.; Fan, P.; Fan, Q.; Zhu, H.; Wang, J. Vehicle Selection for C-V2X Mode 4-Based Federated Edge Learning Systems. IEEE Syst. J. 2024, 18, 1927–1938. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Letaief, K.B. DRL-Based Optimization for AoI and Energy Consumption in C-V2X Enabled IoV. IEEE Trans. Green Commun. Netw. 2025. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Jiang, R.; Xiong, K.; Fan, P.; Zhou, L.; Zhong, Z. Outage probability and throughput of multirelay SWIPT-WPCN networks with nonlinear EH model and imperfect CSI. IEEE Syst. J. 2019, 14, 1206–1217. [Google Scholar] [CrossRef]
- Di, X.; Xiong, K.; Fan, P.; Yang, H.C.; Letaief, K.B. Optimal Resource Allocation in Wireless Powered Communication Networks With User Cooperation. IEEE Trans. Wirel. Commun. 2017, 16, 7936–7949. [Google Scholar] [CrossRef]
- Li, T.; Fan, P.; Chen, Z.; Letaief, K.B. Optimum Transmission Policies for Energy Harvesting Sensor Networks Powered by a Mobile Control Center. IEEE Trans. Wirel. Commun. 2016, 15, 6132–6145. [Google Scholar] [CrossRef]
- Zhou, H.; Fan, P.; Li, J. Global Proportional Fair Scheduling for Networks With Multiple Base Stations. IEEE Trans. Veh. Technol. 2011, 60, 1867–1879. [Google Scholar] [CrossRef]
- Lu, Z.; Li, R.; Lu, K.; Chen, X.; Hossain, E.; Zhao, Z.; Zhang, H. Semantics-Empowered Communications: A Tutorial-Cum-Survey. IEEE Commun. Surv. Tutor. 2024, 26, 41–79. [Google Scholar] [CrossRef]
- Xin, G.; Fan, P.; Letaief, K.B. Semantic Communication: A Survey of Its Theoretical Development. Entropy 2024, 26, 102. [Google Scholar] [CrossRef]
- Zhang, P.; Liu, Y.; Song, Y.; Zhang, J. Advances and challenges in semantic communications: A systematic review. Natl. Sci. Open 2024, 3, 20230029. [Google Scholar] [CrossRef]
- Bourtsoulatze, E.; Burth Kurka, D.; Gündüz, D. Deep Joint Source-Channel Coding for Wireless Image Transmission. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 567–579. [Google Scholar] [CrossRef]
- Kurka, D.B.; Gündüz, D. DeepJSCC-f: Deep Joint Source-Channel Coding of Images with Feedback. IEEE J. Sel. Areas Inf. Theory 2020, 1, 178–193. [Google Scholar] [CrossRef]
- Xie, H.; Qin, Z.; Li, G.Y.; Juang, B.H. Deep Learning Enabled Semantic Communication Systems. IEEE Trans. Signal Process. 2021, 69, 2663–2675. [Google Scholar] [CrossRef]
- Weng, Z.; Qin, Z. Semantic Communication Systems for Speech Transmission. IEEE J. Sel. Areas Commun. 2021, 39, 2434–2444. [Google Scholar] [CrossRef]
- Xie, H.; Qin, Z.; Li, G.Y. Task-Oriented Multi-User Semantic Communications for VQA. IEEE Wirel. Commun. Lett. 2022, 11, 553–557. [Google Scholar] [CrossRef]
- Yang, W.; Du, H.; Liew, Z.Q.; Lim, W.Y.B.; Xiong, Z.; Niyato, D.; Chi, X.; Shen, X.; Miao, C. Semantic Communications for Future Internet: Fundamentals, Applications, and Challenges. IEEE Commun. Surv. Tutor. 2023, 25, 213–250. [Google Scholar] [CrossRef]
- Guler, B.; Yener, A. Semantic index assignment. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communication Workshops (PERCOM WORKSHOPS), Budapest, Hungary, 24–28 March 2014; pp. 431–436. [Google Scholar] [CrossRef]
- Papineni, K.; Roukos, S.; Ward, T.; Zhu, W.J. Bleu: A method for automatic evaluation of machine translation. In Proceedings of the 40th Annual Meeting of the Association for Computational Linguistics, Philadelphia, PA, USA, 6–12 July 2002; pp. 311–318. [Google Scholar]
- Sara, U.; Akter, M.; Uddin, M.S. Image quality assessment through FSIM, SSIM, MSE and PSNR—A comparative study. J. Comput. Commun. 2019, 7, 8–18. [Google Scholar] [CrossRef]
- Vincent, E.; Gribonval, R.; Févotte, C. Performance measurement in blind audio source separation. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 1462–1469. [Google Scholar] [CrossRef]
- Rix, A.; Beerends, J.; Hollier, M.; Hekstra, A. Perceptual evaluation of speech quality (PESQ)-a new method for speech quality assessment of telephone networks and codecs. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing. Proceedings (Cat. No. 01CH37221), Salt Lake City, UT, USA, 7–11 May 2001; Volume 2, pp. 749–752. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, M.; Luo, T.; Saad, W.; Niyato, D.; Poor, H.V.; Cui, S. Performance Optimization for Semantic Communications: An Attention-Based Reinforcement Learning Approach. IEEE J. Sel. Areas Commun. 2022, 40, 2598–2613. [Google Scholar] [CrossRef]
- Jiang, P.; Wen, C.K.; Jin, S.; Li, G.Y. Deep Source-Channel Coding for Sentence Semantic Transmission with HARQ. IEEE Trans. Commun. 2022, 70, 5225–5240. [Google Scholar] [CrossRef]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of Information: An Introduction and Survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Molin, A.; Esen, H.; Johansson, K.H. Scheduling networked state estimators based on value of information. Automatica 2019, 110, 108578. [Google Scholar] [CrossRef]
- Qi, K.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Wang, J.; Letaief, K.B. Deep-Reinforcement-Learning-Based AoI-Aware Resource Allocation for RIS-Aided IoV Networks. IEEE Trans. Veh. Technol. 2024, 74, 1365–1378. [Google Scholar] [CrossRef]
- Qi, K.; Wu, Q.; Fan, P.; Cheng, N.; Fan, Q.; Wang, J. Reconfigurable Intelligent Surface Assisted VEC Based on Multi-Agent Reinforcement Learning. IEEE Commun. Lett. 2024, 28, 2427–2431. [Google Scholar] [CrossRef]
- Gu, X.; Wu, Q.; Fan, P.; Fan, Q.; Cheng, N.; Chen, W.; Letaief, K.B. Drl-based resource allocation for motion blur resistant federated self-supervised learning in iov. IEEE Internet Things J. 2024, 12, 7067–7085. [Google Scholar] [CrossRef]
- Gu, X.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Letaief, K.B. DRL-based federated self-supervised learning for task offloading and resource allocation in ISAC-enabled vehicle edge computing. Digit. Commun. Netw. 2024, in press. [CrossRef]
- Sun, P. Semantic Communication Technologies. In A Guidebook for 5GtoB and 6G Vision for Deep Convergence; Springer Nature: Singapore, 2023; pp. 301–313. [Google Scholar] [CrossRef]
- ITU-T. Requirements and Reference Architecture of Semantic Aware Networking in Future Networks; Technical Report TR.Reqts SAN; ITU-T: Geneva, Switzerland, 2023. [Google Scholar]
- Lan, Q.; Wen, D.; Zhang, Z.; Zeng, Q.; Chen, X.; Popovski, P.; Huang, K. What is Semantic Communication? A View on Conveying Meaning in the Era of Machine Intelligence. J. Commun. Inf. Netw. 2021, 6, 336–371. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Ning, Z.; Zhou, M.; Guo, L.; Jedari, B. A survey on semantic communications: Technologies, solutions, applications and challenges. Digit. Commun. Netw. 2024, 10, 528–545. [Google Scholar] [CrossRef]
- Chen, J.; Guo, C.; Feng, C.; Liu, C. Resource allocation for the semantic communication in the intelligent networked environment. Chin. J. Internet Things 2022, 6, 47–57. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, Y.; Chen, L.; Shi, J. A Stackelberg game-based caching incentive scheme for roadside units in VANETs. Sensors 2020, 20, 6625. [Google Scholar] [CrossRef]
- Ribouh, S.; Hadid, A. Is Semantic Communication for Autonomous Driving Secured against Adversarial Attacks? In Proceedings of the 2024 IEEE 6th International Conference on AI Circuits and Systems (AICAS), Abu Dhabi, United Arab Emirates, 22–25 April 2024; pp. 139–143. [Google Scholar] [CrossRef]
- Xu, X.; Chen, Y.; Wang, B.; Bian, Z.; Han, S.; Dong, C.; Sun, C.; Zhang, W.; Xu, L.; Zhang, P. CSBA: Covert Semantic Backdoor Attack Against Intelligent Connected Vehicles. IEEE Trans. Veh. Technol. 2024, 73, 17923–17928. [Google Scholar] [CrossRef]
- Kang, J.; He, J.; Du, H.; Xiong, Z.; Yang, Z.; Huang, X.; Xie, S. Adversarial Attacks and Defenses for Semantic Communication in Vehicular Metaverses. IEEE Wirel. Commun. 2023, 30, 48–55. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, J.; Chen, L.; Lu, B.; Yang, Q. A novel capture-aware TDMA-based MAC protocol for safety messages broadcast in vehicular ad hoc networks. IEEE Access 2019, 7, 116542–116554. [Google Scholar] [CrossRef]
- Zheng, G.; Ni, Q.; Navaie, K.; Pervaiz, H.; Zarakovitis, C. A Distributed Learning Architecture for Semantic Communication in Autonomous Driving Networks for Task Offloading. IEEE Commun. Mag. 2023, 61, 64–68. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Literatures | Core Content | |
|---|---|---|---|
| Key Technologies | Semantic Information Extraction | [8,9,10,11,12,13,14,15] | Extract semantic information from multimodal data. |
| Semantic Communication Architecture | [12,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29] | Diverse semantic communication architectures covering multitask and multiuser collaboration, image transmission, generative AI, etc. | |
| Resource Allocation and Management | [24,30,31,32,33,34,35,36,37,38] | Resource allocation methods based on reinforcement learning, optimization theory, and federated learning. | |
| Specific Applications | Traffic Environment Perception and Understanding | [39,40] | Enhance the coverage and accuracy of environmental perception. |
| Intelligent Driving Decision Support | [41,42] | Extract key semantic information to support real-time decision making. | |
| IoV Service Optimization | [43,44,45] | Optimize service performance through semantic communication. | |
| Intelligent Traffic Management | [46,47,48,49] | Improve traffic management efficiency and emergency response capabilities. |
| Category | Metric | Definition | Applicable Scenarios |
|---|---|---|---|
| Semantic Accuracy | IoU | Intersection over Union (overlap between predicted and ground-truth regions) | Environmental perception, object detection |
| mIoU | Mean IoU across multiple classes | Complex scene perception | |
| PSNR | Peak signal-to-noise ratio (pixel-level difference between original and reconstructed data) | Image transmission quality | |
| F1-score | Harmonic mean of precision and recall for classification tasks | Object classification, anomaly detection | |
| Real-Time Capability | End-to-End Latency | Total time from data generation to application (encoding + transmission + decoding) in ms | V2V collision alerts, autonomous driving |
| Resource Efficiency | Computational Overhead (FLOPs) | Floating-point operations per semantic encoding/decoding cycle | Edge device deployment feasibility |
| Bandwidth Efficiency | Compression ratio (original data size/transmitted data size) | Image/video transmission |
| Category | Architecture | Characteristics |
|---|---|---|
| Multitask and Multiuser | Co-SC Architecture [16] | Multiuser collaboration, with the semantic codec (Sem-Codec) and joint source–channel codec (JSC-Codec) working together to improve semantic reconstruction performance. |
| Unified Multiuser Semantic Communication System [14] | Integration of multiuser semantic information, dynamic update of shared and private knowledge bases, and support for joint training of multiple tasks. | |
| Multitask-Oriented Semantic Communication Framework [17] | Multitask processing combining the semantic encoder with task-oriented decoders to support image reconstruction and classification tasks. | |
| SemHARQ Framework [18] | Semantic-aware hybrid automatic repeat request (HARQ), feature importance ranking, and distortion evaluation to enhance transmission robustness. | |
| Image Transmission | ISSC System [12] | Multiscale semantic feature extraction based on Swin Transformer to reduce data transmission volume while ensuring image quality. |
| VIS-SemCom System [19] | Importance-aware image segmentation, multiscale semantic extraction, and importance-aware loss function to improve the segmentation accuracy of important objects. | |
| SEECAD System [20] | Deep learning-based semantic encoder and decoder, combined with LDPC codes, to transmit semantic information instead of original pixel data. | |
| MTDSC Method [21] | Multiscene object detection, combined with spatial pyramid pooling and long-short-term memory network to optimize semantic label assignment and transmission. | |
| Combination of Low-latency Routing and Semantic Communication [22] | Low-latency routing algorithm combined with semantic communication to optimize image data transmission and reduce latency. | |
| Based on Generative AI | AIGC Encoder–Decoder Architecture [23] | Image-to-text conversion and reinforcement learning optimization to reduce data transmission volume while ensuring image quality. |
| Multimodal Semantic-aware Generative AI Framework [24] | Extracts semantic text information and image skeletons and reconstructs images in combination with a generative AI model. | |
| G-MSC Framework [15] | Multimodal alignment and fusion, with a generative AI-enhanced semantic encoder to improve data quality and communication reliability. | |
| Generative AI-Driven Semantic Communication Framework [25] | Lightweight MSAM extracts key semantic information, combined with GAN to reconstruct images, reducing data transmission volume. | |
| Agent-Driven Generative Semantic Communication Framework (A-GSC) [26] | Generative AI combined with reinforcement learning to dynamically adjust the semantic sampling strategy, improving information interpretability and transmission efficiency. | |
| Other Architectures | Blockchain-based Edge-assisted Knowledge Base Management System [27] | Blockchain technology ensures data security and consistency, and semantic segmentation reduces data transmission volume. |
| PreCMTS Strategy [28] | Task-driven knowledge-graph-assisted semantic communication; dynamically adjusts semantic unit allocation and relay selection. | |
| SCKS Framework [29] | Knowledge sharing of neural network models, with a generative adversarial network (GAN) decoding semantic information to update the vehicle model. |
| Category | Methodology | Characteristics | Application Scenario |
|---|---|---|---|
| Reinforcement Learning | SARADC Framework [30] | Significantly improves HSSE and semantic throughput, adapting to high-resolution and low-signal-to-noise-ratio conditions. | 5G-V2X heterogeneous networks |
| SSS Algorithm [31] | Dynamically optimizes spectrum sharing, improving semantic transmission efficiency and spectrum utilization. | Spectrum sharing in vehicle networking | |
| DDQN Method [24] | Ensures efficient semantic information transmission and supports multiagent collaborative resource allocation. | Generative AI-empowered V2V communication in IoV | |
| SAMRA Algorithm [32] | Adapts to multiscenario changes, improving resource allocation efficiency and task success rate. | C-V2X platoon communication | |
| VSRAA-SM Algorithm [33] | Improves video semantic understanding accuracy, reducing the CUE outage probability and V2V transmission rate. | In-vehicle video semantic resource allocation | |
| Optimization Theory | Lyapunov Optimization Method [34] | Features fast convergence, improving system robustness and power consumption efficiency. | D2D in-vehicle networks |
| Two-stage Suboptimal Solution Method [35] | Maximizes semantic detection accuracy, minimizes wireless resource costs, and ensures communication link quality. | Vehicle platoon collaboration | |
| Two-stage Stochastic Integer Programming (SSTS) [36] | Optimizes resource allocation, reduces transmission costs, and supports immersive experiences. | Virtual transportation network in the meta-verse | |
| Federated Learning | MSFTL Framework [37] | Reduces vehicle computational costs, improves resource utilization efficiency, and supports distributed training. | In-vehicle semantic communication |
| FVSCom Framework [38] | Improves computational efficiency and semantic extraction accuracy, enhancing robustness to vehicle departure or withdrawal. | In-vehicle semantic communication |
| Application Scenarios | Representative Research | Advantages |
|---|---|---|
| Traffic Environment Perception | Environmental Semantic Communication [39] | Reduces data transmission volume, improves system response ability, and is suitable for millimeter-wave and terahertz communication systems. |
| Cooperative Perception Semantic Communication [40] | Improves perception accuracy and throughput in low-signal-to-noise-ratio environments and avoids the “cliff effect”. | |
| Intelligent Driving Decision Support | Dynamic Roadblock Semantic Traffic Control [41] | Improves decision-making accuracy and real-time performance, and reduces communication overhead. |
| High-altitude Platform Semantic Communication [42] | Reduces communication costs; improves overall system performance and decision-making accuracy. | |
| IoV Service Optimization | SemCom-empowered Service Provisioning Scheme [43] | Significantly reduces queuing delay and improves the throughput of semantic data packets. |
| Receiver-demand-centered Semantic Communication System [44] | Greatly reduces data transmission volume and improves users’ personalized experience. | |
| 6G Semantic Communication Scheme [45] | Improves communication efficiency and service quality in in-vehicle scenarios. | |
| Intelligent Traffic Management | Vehicle Quantity Prediction Model [46] | Improves the decision-making support ability for traffic signal control and congestion alleviation. |
| Scalable Multitask Semantic Communication System (SMSC-FIR) [47] | Improves adaptability under dynamic channel conditions and significantly improves multitask processing efficiency. | |
| Diffusion Model-based Channel Enhancer (DMCE) [48] | Improves the channel interference suppression ability of multiuser semantic communication systems and enhances the quality of semantically segmented images. | |
| Emergency Vehicle Dispatching Semantic Communication [49] | Improves the passage efficiency of emergency vehicles and reduces interference with other traffic flows. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, S.; Wu, Q.; Fan, P.; Fan, Q. A Survey on Semantic Communications in Internet of Vehicles. Entropy 2025, 27, 445. https://doi.org/10.3390/e27040445
Ye S, Wu Q, Fan P, Fan Q. A Survey on Semantic Communications in Internet of Vehicles. Entropy. 2025; 27(4):445. https://doi.org/10.3390/e27040445
Chicago/Turabian StyleYe, Sha, Qiong Wu, Pingyi Fan, and Qiang Fan. 2025. "A Survey on Semantic Communications in Internet of Vehicles" Entropy 27, no. 4: 445. https://doi.org/10.3390/e27040445
APA StyleYe, S., Wu, Q., Fan, P., & Fan, Q. (2025). A Survey on Semantic Communications in Internet of Vehicles. Entropy, 27(4), 445. https://doi.org/10.3390/e27040445