Real-Time Robust and Optimized Control of a 3D Overhead Crane System



Abstract
1. Introduction
2. Three-Dimensional Overhead Crane Modeling
2.1. Equations of Motion
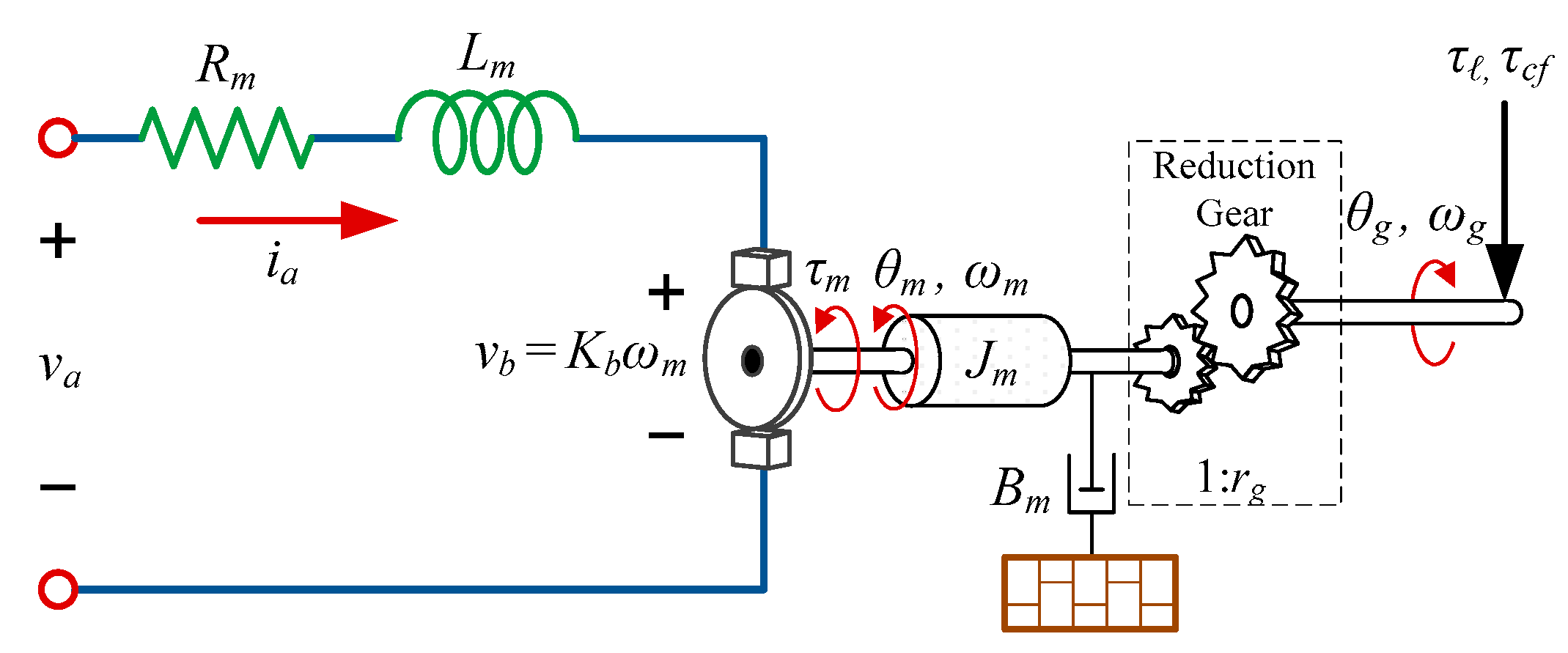
2.2. Actuator Dynamics
2.3. Independent Joint Model
2.4. Discrete-Time State Space Model of Overhead Crane
3. Configuration of the Proposed Control System
- (1)
- State feedback control, which provides servo control operation for trajectory tracking control purposes along with state observer to provide estimation of states variables from position sensor measurements and attenuate the impact of measurement noises.
- (2)
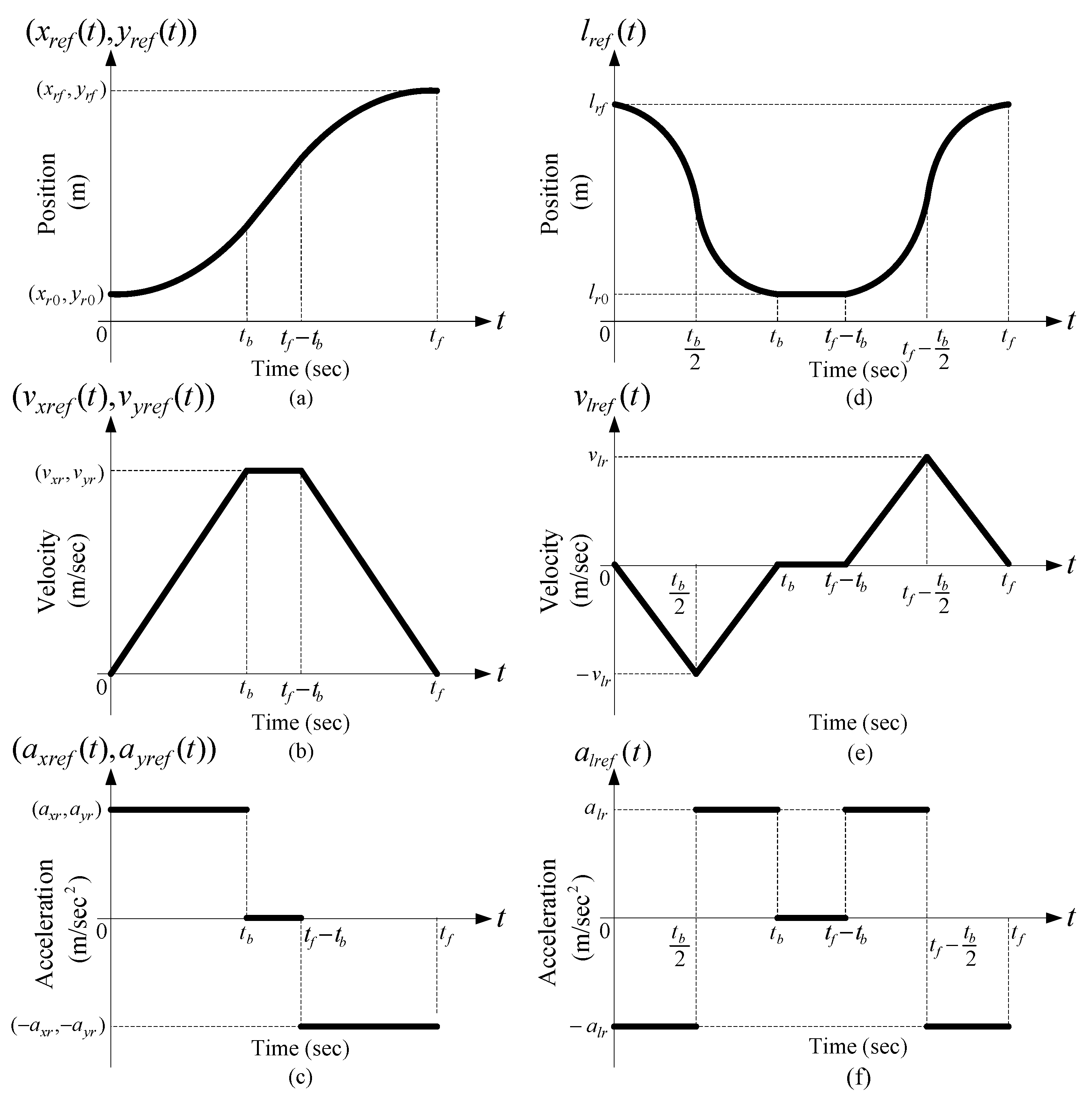
- Reference signal generator, which supplies reference state trajectory profiles considering the physical limitations of the actuators admissible torques and speeds, and overhead crane workspace, alongside a new motion planning scheme.
- (3)
- Feedforward control, which is designed to act as a compensator by generating the desired output trajectory from system model and applying it in the feedforward path to reduce the effects of nonlinear disturbances and improve the accuracy of trajectory tracking.
- (4)
- Load swing control, which is designed to damp the load swings by modifying reference traveling and traversing accelerations using high-gain observer, as will be explained in Section 4.1.
3.1. State Feedback Control and State Observer
3.2. Reference Signal Generator
3.3. Feedforward Control
3.4. Swing Angle Observer
4. Stability and Robustness Analysis of the Proposed Discrete-Time Control System
4.1. Load Swing Stability
4.2. Trajectory Tracking Stability
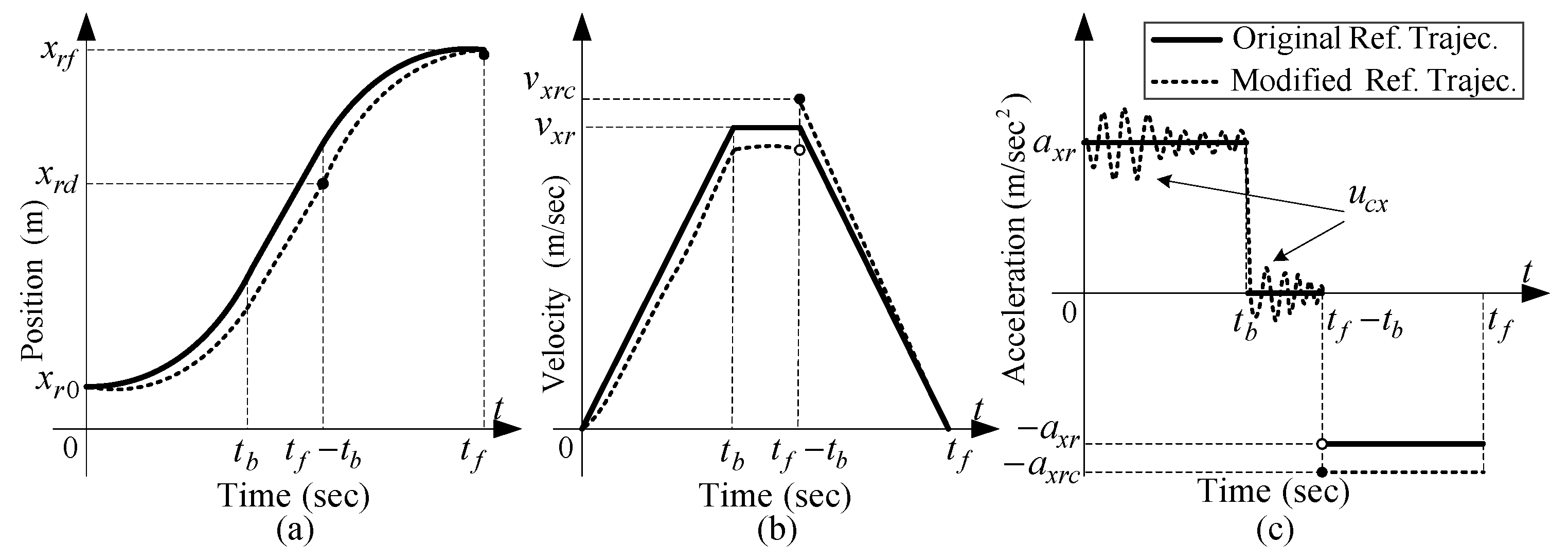
5. Real-Time Motion Planning Scheme
- Step 1:
- Determine the correction velocities (vxrc, vyrc) needed for the trolley to move from its deviated reference position (xrd, yrd) occurs at the end of constant-velocity zone to the final desired location (xrf, yrf) within decelerating time (tb seconds) in parabolic form, i.e., vxrc = 2 (xrf − xrd)/tb and vyrc = 2 (yrf − yrd)/tb.
- Step 2:
- Determine the correction reference trolley acceleration (axrc, ayrc) needed for the velocities {vxrc, vyrc} to go to zero and set it in uc_xy with Kθ = 0, i.e., ucx = axrc = (vxrc/tb) and ucy = ayrc = (vyrc/tb) at time tf–tb.
- Step 3:
- Set the initial conditions to [xrd vxrc]T and [yrd vyrc]T at time tf–tb for the traveling and traversing reference models in reference signal generator block, respectively.
6. Practical Results
6.1. Specifications of the 3D Overhead Crane
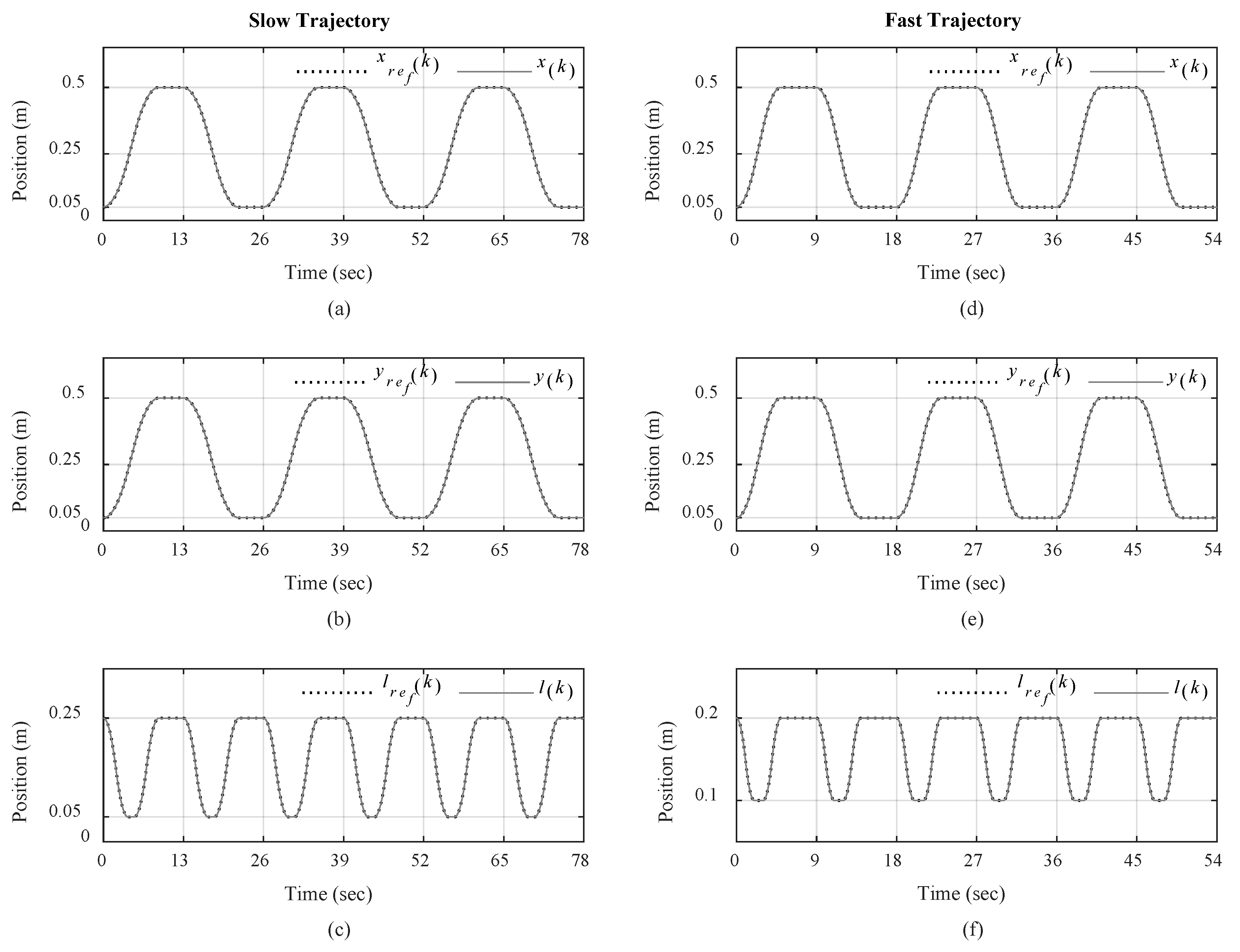
6.2. Experimental Results and Validation
7. Discussion
8. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Mita, T.; Kanai, T. Optimal control of the crane system using the maximum speed of the trolley. Trans. Soc. Instrument. Control Eng. 1979, 15, 833–838, (In Japanese with English Abstract). [Google Scholar] [CrossRef][Green Version]
- Ohnishi, E.; Tsuboi, I.; Egusa, T. Automatic control of an overhead crane. In Proceedings of the 8th IFAC World Congress; Kyoto, Japan, 24–28 August 1981; pp. 1885–1890. [Google Scholar]
- Ridout, A.J. New feedback control system for overhead cranes. In Proceedings of the Electric Energy Conference (EEC1987) Adelaide, Australia, 6–9 October 1987; pp. 135–140. [Google Scholar]
- Moustafa, K.A.F.; Ebeid, A.M. Nonlinear modeling and control of an overhead crane load sway. ASME J. Dyn. Syst. Meas. Control 1988, 110, 266–271. [Google Scholar] [CrossRef]
- Lee, H.H. Modeling and control of a three-dimensional overhead crane. ASME J. Dyn. Syst. Meas. Control 1998, 120, 471–476. [Google Scholar] [CrossRef]
- Piazzi, A.; Visioli, A. Optimal dynamic-inversion-based control of an overhead crane. Proc. Inst. Elect. Eng. Control Theory Appl. 2002, 149, 405–411. [Google Scholar] [CrossRef]
- Xi, Z.; Hesketh, T. Discrete time integral sliding mode control for overhead crane with uncertainties. IET Control Theory Appl. 2010, 4, 2071–2081. [Google Scholar] [CrossRef]
- Chen, H.; Fang, Y.; Sun, N. A swing constraint guaranteed MPC algorithm for underactuated overhead cranes. IEEE/ASME Trans. Mechatron. 2016, 21, 2543–2555. [Google Scholar] [CrossRef]
- Ma, X.; Bao, H. An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes. Appl. Sci. 2018, 8, 1463. [Google Scholar] [CrossRef]
- Ibarra-Esquer, J.E.; González-Navarro, F.F.; Flores-Rios, B.L.; Burtseva, L.; Astorga-Vargas, M.A. Tracking the Evolution of the Internet of Things Concept Across Different Application Domains. Sensors 2017, 17, 1379. [Google Scholar] [CrossRef]
- Sjöman, H.; Autiosalo, J.; Juhanko, J.; Kuosmanen, P.; Steinert, M. Using Low-Cost Sensors to Develop a High Precision Lifting Controller Device for an Overhead Crane—Insights and Hypotheses from Prototyping a Heavy Industrial Internet Project. Sensors 2018, 18, 3328. [Google Scholar] [CrossRef]
- Peláez, G.; Vaugan, J.; Izquierdo, P.; Rubio, H.; García-Prada, J.C. Dynamics and Embedded Internet of Things Input Shaping Control for Overhead Cranes Transporting Multibody Payloads. Sensors 2018, 18, 1817. [Google Scholar] [CrossRef]
- Fang, Y.; Dixon, W.; Dawson, D.; Zergeroglu, E. Nonlinear coupling control laws for an underactuated overhead crane System. IEEE/ASME Trans. Mechatron. 2003, 8, 418–424. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Zhang, X. A novel nonlinear coupling control approach for overhead crane: theory and implementation. In Proceedings of the American Control Conference (ACC2012), Montreal, Canada, 27–29 June 2012; pp. 6276–6281. [Google Scholar]
- Sun, N.; Fang, Y. New energy analytical results for the regulation of underactuated overhead cranes: An end-effector motion-based approach. IEEE Trans. Ind. Electron. 2012, 59, 4723–4734. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Zhang, X. Energy coupling output feedback control of 4-DOF underactuated cranes with saturated inputs. Automatica 2013, 49, 1318–1325. [Google Scholar] [CrossRef]
- Wu, X.; He, X. Nonlinear Energy-based regulation control of three-dimensional overhead cranes. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1297–1308. [Google Scholar] [CrossRef]
- Yang, J.H.; Yang, K.S. Adaptive coupling control for overhead crane systems. Mechatronics 2007, 17, 143–152. [Google Scholar] [CrossRef]
- Yang, J.H.; Shen, S.H. Novel Approach for Adaptive Tracking Control of a 3-D overhead crane system. J. Intell. Robot. Syst. 2011, 62, 1–59. [Google Scholar] [CrossRef]
- Tuan, L.A.; Lee, S.G.; Dang, V.H.; Moon, S.; Kim, B.S. Partial feedback linearization control of a three-dimensional overhead crane. Int. J.; Control, Autom. Syst. 2013, 11, 718–727. [Google Scholar] [CrossRef]
- Chwa, D. Nonlinear tracking control of 3-D overhead crane against the initial swing angle and the variation of payload weight. IEEE Trans. Control Syst. Technol. 2009, 17, 876–883. [Google Scholar] [CrossRef]
- Zavari, K.; Pipeleers, G.; Swevers, J. Gain-Scheduled Controller Design: Illustration on an Overhead Crane. IEEE Trans. Ind. Electron. 2014, 61, 3713–3718. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H. A new antiswing control method for underactuated cranes with unmodeled uncertainties: Theoretical design and hardware experiments. IEEE/ASME Trans. Ind. Electron. 2015, 26, 453–465. [Google Scholar] [CrossRef]
- Otto, S.; Seifried, R. Real-time trajectory control of an overhead crane using servo-constraints. Multibody Syst. Dyn. 2018, 42, 1–17. [Google Scholar] [CrossRef]
- Khatamianfar, A.; Savkin, A.V. A new tracking control approach for 3D overhead crane systems using model predictive control. In Proceedings of the 2014 European Control Conference (ECC2014), Strasbourg, France, 24–27 June 2014; pp. 796–801. [Google Scholar]
- Vukov, M.; Loock, W.V.; Houska, B.; Ferreau, H.J.; Swevers, J.; Diehl, M. Experimental validation of nonlinear MPC on an overhead crane using automatic code generation. In Proceedings of the American Control Conference (ACC2012), Montreal, Canada, 27–29 June 2012; pp. 6264–6269. [Google Scholar]
- Kapernick, B.; Graichen, K. Model predictive control of an overhead crane using constraint substitution. In Proceedings of the American Control Conference (ACC2013), Washington, DC, USA, 17–19 June 2013; pp. 3973–3978. [Google Scholar]
- Lee, H.H.; Cho, S.K. A new fuzzy-logic anti-swing control for industrial three-dimensional overhead cranes. In Proceedings of the IEEE Int. Conference Robotics, Autom. (ICRA2001), Seoul, South Korea, 21–26 May 2001; pp. 2956–2961. [Google Scholar]
- Diantong, L.; Jianqiang, Y.; Dongbin, Z.; Wei, W. Adaptive sliding mode fuzzy control for a two-dimensional overhead crane. Mechatronics 2005, 15, 505–522. [Google Scholar]
- Chang, C.Y. Adaptive fuzzy controller of the overhead cranes with nonlinear disturbance. IEEE Trans. Indus. Info. 2007, 3, 164–172. [Google Scholar] [CrossRef]
- Zhao, Y.; Gao, H. Fuzzy-model-based control of an overhead crane with input delay and actuator saturation. IEEE Trans. Fuzzy Syst. 2012, 20, 181–186. [Google Scholar] [CrossRef]
- Sun, Z.; Bi, Y.; Zhao, X.; Sun, Z.; Ying, C.; Tan, S. Type-2 Fuzzy Sliding Mode Anti-Swing Controller Design and Optimization for Overhead Crane. IEEE Access. 2018, 6, 51931–51938. [Google Scholar] [CrossRef]
- Yu, W.; Li, X.; Panuncio, F. Stable Neural Pid Anti-Swing Control for an Overhead Crane. Intell. Autom. Soft Comput. 2014, 20, 145–158. [Google Scholar] [CrossRef]
- Chang, C.Y.; Lie, H.W. Real-time visual tracking and measurement to control fast dynamics of overhead cranes. IEEE Trans. Ind. Electron. 2012, 59, 1640–1649. [Google Scholar] [CrossRef]
- Lee, L.H.; Huang, C.H.; Ku, S.C.; Yang, Z.H.; Chang, C.Y. Efficient Visual Feedback Method to Control a Three-Dimensional Overhead Crane. IEEE Trans. Ind. Electron. 2014, 61, 4073–4083. [Google Scholar] [CrossRef]
- Lee, H.H. A new approach for the anti-swing control of overhead cranes with high-speed load hoisting. Int. J. Control 2003, 76, 1493–1499. [Google Scholar] [CrossRef]
- Lee, H.H. A new design approach for the anti-swing control of overhead cranes with high-speed load hoisting. Int. J. Control 2004, 77, 931–940. [Google Scholar] [CrossRef]
- Lee, H.H.; Liang, Y.; Segura, D. A sliding-mode antiswing trajectory control for overhead cranes with high-speed load hoisting. ASME J. Dyn. Syst. Meas. Control 2006, 128, 842–845. [Google Scholar] [CrossRef]
- Vazquez, C.; Fridman, L.; Collado, J. Second order sliding mode control of a 3-dimensional overhead crane. In Proceedings of the 51st IEEE Conference Decis. Control (CDC2012), Hawaii, USA, 10–13 December 2012; pp. 6472–6476. [Google Scholar]
- Vazquez, C.; Collado, J.; Fridman, L. On the second order sliding mode control of a parametrically excited overhead-crane. In Proceedings of the American Control Conference (ACC2012), Montreal, Canada, 27–29 June 2012; pp. 6288–6293. [Google Scholar]
- Park, M.S.; Chwa, D.; Eom, M. Adaptive sliding-mode antisway control of uncertain overhead cranes with high-speed hoisting motion. IEEE Trans. Fuzzy Syst. 2014, 22, 1262–1271. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H.; Ho, B. Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters: Design and experiments. IEEE/ASME Trans. Mechatron. 2015, 20, 2107–2119. [Google Scholar] [CrossRef]
- Lee, H.H. A new motion-planning scheme for overhead cranes with high-speed load hoisting. ASME J. Dyn. Syst. Meas. Control 2004, 126, 359–364. [Google Scholar] [CrossRef]
- Lee, H.H. Motion planning for three-dimensional overhead cranes with high-speed load hoisting. Int. J. Control 2005, 78, 875–886. [Google Scholar] [CrossRef]
- Broeck, L.V.; Diehl, M.; Swevers, J. A model predictive control approach for time optimal point-to-point motion control. Mechatronics 2011, 21, 1203–1212. [Google Scholar] [CrossRef]
- Fang, Y.; Ma, B.; Wang, P.; Zhang, X. A Motion Planning-Based Adaptive Control Method for an Underactuated Crane System. IEEE Trans. Control Syst. Technol. 2012, 20, 241–248. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Zhang, Y.; Ma, B. A Novel Kinematic Coupling-Based Trajectory Planning Method for Overhead Cranes. IEEE/ASME Trans. Mechatron. 2012, 7, 166–173. [Google Scholar] [CrossRef]
- Lewis, F.L.; Dawson, D.M.; Abdallah, T.C. Robot Manipulator Control: Theory and Practice, 2nd ed.; CRC Press: New York, NY, USA, 2004. [Google Scholar]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Khatamianfar, A. A New Approach to Overhead Crane Parameter Estimation and Friction Modeling. In Proceedings of the 2014 IEEE Int. Conference Syst. Man, Cybern. (SMC2014), San Diego, CA, USA, 5–8 October 2014; pp. 2581–2586. [Google Scholar]
- Khatamianfar, A.; Savkin, A.V. A new discrete time approach to anti-swing tracking control of overhead cranes. In Proceedings of the 2014 IEEE Multi-Conference Syst. Control (MSC2014), Nice, France, 8–10 October 2014; pp. 790–795. [Google Scholar]
- Khatamianfar, A. Discrete-Time Servo Control of Overhead Cranes with Robust Load Swing Damping. In Proceedings of the 2015 European Control Conference (ECC2015), Linz, Austria, 15–17 July 2015; pp. 1106–1113. [Google Scholar]
- Khatamianfar, A. Advanced Discrete-Time Control Methods for Industrial Applications. Ph.D. Thesis, The University of New South Wales, Sydney, NSW, Australia, April 2015. [Google Scholar]
- Canudas, C.; Astrom, K.J.; Braun, K. Adaptive friction compensation in DC-motor drives. IEEE J. Robot. Autom. 1987, 3, 681–685. [Google Scholar] [CrossRef]
- Fateh, M.; Farahani, S.; Khatamianfar, A. Task space control of a welding robot using a fuzzy coordinator. Int. J. Control, Automat. Syst. 2010, 8, 574–582. [Google Scholar] [CrossRef]
- Astrem, K.J.; Wittenmark, B. Computer-Controlled Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- INTEGO Limited. Available online: http://www.inteco.com.pl (accessed on 28 February 2014).
- Hoy, M.; Matveev, A.S.; Savkin, A.V. Algorithms for Collision Free Navigation of Mobile Robots in Complex Cluttered Environments: A Survey. Robotica 2015, 33, 463–497. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters for i = x,y,z | Jei (kg/m) | Bei (N.s) | rgi | Rpi (m) | Kei (N·m/A·Ω) | α1i | α2i |
|---|---|---|---|---|---|---|---|
| Traveling | 75 × 10−4 | 96.3 × 10−3 | 13 × 10−3 | 37.5 × 10−3 | 14 × 10−4 | 23 × 10−4 | 21 × 10−4 |
| Traversing | 40 × 10−4 | 97.5 × 10−3 | 13 × 10−3 | 37.5 × 10−3 | 14 × 10−4 | 14 × 10−4 | 11 × 10−4 |
| Hoisting | 66 × 10−4 | 24.5 × 10−2 | 13 × 10−3 | 13.5 × 10−3 | 14 × 10−4 | 13 × 10−4 | 14 × 10−4 |
| Parameters (xref, yref) | (axr, ayr) (m/s2) | (vxr, vyr) (m/s) | (xr0, yr0) (m) | (xrf, yrf) (m) | tb (s) | tf (s) |
|---|---|---|---|---|---|---|
| Slow motion | 22.5 × 10−3 | 9 × 10−2 | 5 × 10−2 | 50 × 10−2 | 4 | 9 |
| Fast motion | 75 × 10−3 | 15 × 10−2 | 5 × 10−2 | 50 × 10−2 | 2 | 5 |
| Parameters (lref) | alr (m/s2) | vlr (m/s) | lr0 (m) | lrf (m) | tb (s) | tf (s) |
| Slow motion | 50 × 10−3 | 10 × 10−2 | 25 × 10−2 | 5 × 10−2 | 4 | 9 |
| Fast motion | 100 × 10−3 | 10 × 10−2 | 2 × 10−2 | 10 × 10−2 | 2 | 5 |
| Parameters for i = x,y,z | ||||
|---|---|---|---|---|
| Traveling | [12.9 × 102 1.1 × 102] | [42.9 × 10−2 26.5 × 10−2]T | [1 25]T | 17 × 10−2 |
| Traversing | [25.9 × 102 1.2 × 102] | [41.5 × 10−2 27.7 × 10−2]T | [1 25]T | 17 × 10−2 |
| Hoisting | [38.4 × 102 1.2 × 102] | [43.5 × 10−2 29.7 × 10−2]T | N/A | N/A |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khatamianfar, A.; Savkin, A.V. Real-Time Robust and Optimized Control of a 3D Overhead Crane System. Sensors 2019, 19, 3429. https://doi.org/10.3390/s19153429
Khatamianfar A, Savkin AV. Real-Time Robust and Optimized Control of a 3D Overhead Crane System. Sensors. 2019; 19(15):3429. https://doi.org/10.3390/s19153429
Chicago/Turabian StyleKhatamianfar, Arash, and Andrey V. Savkin. 2019. "Real-Time Robust and Optimized Control of a 3D Overhead Crane System" Sensors 19, no. 15: 3429. https://doi.org/10.3390/s19153429
APA StyleKhatamianfar, A., & Savkin, A. V. (2019). Real-Time Robust and Optimized Control of a 3D Overhead Crane System. Sensors, 19(15), 3429. https://doi.org/10.3390/s19153429