1. Introduction
The velocity of seawater is one of the most fundamental basic data used in ocean science research and engineering [
1]. Ocean acoustic tomography (OAT) is an advanced oceanographic technology first proposed by Munk and Wunsch in 1979 [
2]. This technique can make a simultaneous mapping (snapshot) of time-varying subsurface structures of current velocity and sound speed using an underwater sound channel [
3,
4]. Coastal acoustic tomography (CAT) is the further advancement of OAT that has been developed in coastal areas. The CAT system was developed by the Hiroshima University Group as a new observation tool utilized in oceanographic observation from the shore since 1995 [
5]. Consequently, a growing number of studies on this technology have been conducted. Initially, more comprehensive, multi-station measurements with CAT systems (more than five stations) were conducted by the Hiroshima University Group initially [
6,
7,
8,
9]. Of note, CAT has been highly applied in measuring various coastal–sea phenomena, including the tidal current [
10,
11], residual current [
12,
13,
14], internal solitary waves [
15], internal tides [
16], tidal bores [
17] and the coastal upwelling [
18,
19] et al. This was attributed to its advantages, including low cost, compact system, simple instrument operation and easy execution on board. Additionally, it is worth noting that CAT reconstructs velocity structures with few sensors covering a wide range of survey zone [
11], the traditional observation range (station-to-station distance), which might be less than 50 km in the coastal seas shallower than 100 m [
2].
Many CAT applications in large scale areas have achieved satisfactory outcomes. For instance, a 2009 study Zhu et al. [
20] performed the CAT experiment for mapping the tidal currents in Zhitouyang Bay with seven CAT stations. Here, the volume transport for the entire tomography domain, considered as 22 × 22 km, was calculated to be nearly equal to zero, implying that the observational errors were quite small. In 2015, an experiment using 11 CAT stations ranged between 2.4 km and 16.1 km was performed by Zhang et al. [
11] in the Dalian Bay where the detailed horizontal distributions of tidal and residual currents were well reconstructed with the standard inversion method. Nevertheless, the data assimilation was not to be implemented since the tomography field was not well surrounded by shorelines. In 2018, Chen M et al. [
21] provided CAT with the latest feature to realize the real-time data transmission from an offshore subsurface station to a shore station with mirror-transponder functionality. Furthermore, a 2019 investigation by Syamsudin et al. observed the subsurface structures of internal solitary waves in the Lombok Strait with two bottom-moored CAT systems over a path length of 18.286 km [
15]. In this study, the four-layer subsurface temperature structures by the inverse analysis were reconstructed where the phase relations of internal solitary waves to tides were initially observed. However, the overestimation of travel times occurred since the range-dependent distribution of the sound speed was not considered in the simulation. Additionally, data assimilation acted as an effective partner of CAT in predicting coastal–sea environmental variations [
2]. Zhu et al. [
22] presented the application of an unstructured triangular grid to the Finite-Volume Community Ocean Model, to assimilate CAT data, showing that missing data exhibited lesser impact on assimilation than on inversion. These large-scale measurements using CAT in bays, ports, semi-enclosed bays, and inland seas were significantly considered and achieved satisfactory progress [
23,
24,
25]. On the other hand, the applications of CAT in small-scale areas are largely understudied.
Since 2010, a group of Kawanisi proposed that the fluvial acoustic tomography (FAT) system extends the applications of CAT to even shallower waters ranging from mountainous rivers to the mouth of estuaries in coastal regions (maximum 10 m deep) [
26,
27]. As a consequence, the application of CAT in shallow waters such as the marine ranch, artificial upwelling, and Autonomous Underwater Vehicle (AUV) observation has been widely investigated, and particularly the short-range velocity measurements have gradually been an important focus of research. The observation area of those specific targets is usually within 1 km (much smaller than the traditional CAT observation range) [
28,
29,
30]. Luo et al. [
31] conducted a field experiment in Delaware Bay with two CAT stations at a distance of 387 m to observe the average velocity along the propagation path. Elsewhere, Li et al. [
32] experimented with a laboratory pool using two CAT systems at a distance of 22.73 m and observed a unidirectional flow of 0.8 m/s, which was in line with current findings from simulation studies. Satisfactory results were obtained in laboratory tests, nonetheless, it is still necessary to conduct tests on seas where the environment is more complex. Although the CAT has been used in the observation of the flow field in the small-scale areas, the available evidence remains scanty.
Complex hydrological environment, high noise level, and complicated flow field are among the observation environments that markedly influence sound propagation in the small-scale area compared to the large-scale CAT observation. At present, there is no systematic study on CAT in small-scale areas. Moreover, there are few existing CAT observations involving the snapshots of two-dimensional (2-D) velocity fields in the field experiment, which is vital to intelligent monitoring and management for small-scale areas.
Due to the large environmental noise, M-sequence with an efficient autocorrelation property was generally adopted. The observation results would be directly influenced by the number of cycles used by an M-sequence bit, the order of M-sequence, the carrier frequency, and the signal repetition times [
26,
33]. Therefore, a reasonable signal design is vital in short-range CAT observation. In the previous study, we designed a research outline and obtained part of the short-range velocity field by CAT, which validated the feasibility of the preliminary assumption [
34]. This study conducted a quantitative analysis to acquire more comprehensive information on the small-scale velocity field. Moreover, quantitative error analysis and systematic discussion were performed to confirm the reliability of the results. A small-scale experiment with four CAT systems for reconstructing 2-D horizontal velocity fields was conducted on January 20, 2019, in the Panzhinan waterway. The distances between CAT systems in the survey zone were significantly short with the shortest distance being 85.1 m. To obtain high resolution in short-range observation, a high carrier frequency of 50 kHz was selected, which was the first short-range sea test conducted with a 50 kHz CAT system. A sound transmission based on the round-robin method was proposed to adopt the short-range CAT with the 12th order M sequence, which can be beneficial to ensure the normal signal transmission and obtain high signal-to-noise-ratio (SNR) for small-scale CAT observation in the high-noise environment. The feasibility and considerable accuracy of the CAT method in the small-scale velocity profiling measurement were verified by several methods.
The rest of the paper is structured as follows. In
Section 2, the inversion method used to calculate the velocity fields in a horizontal slice is introduced. Experimental settings and ray simulation are also discussed.
Section 3 includes the correlation of the data and the results of horizontal velocity fields. The net volume transport and comparisons of the CAT results are performed to examine the accuracy. The concluding remarks are provided in
Section 4.
2. Method
2.1. The Forward and Inverse Problems
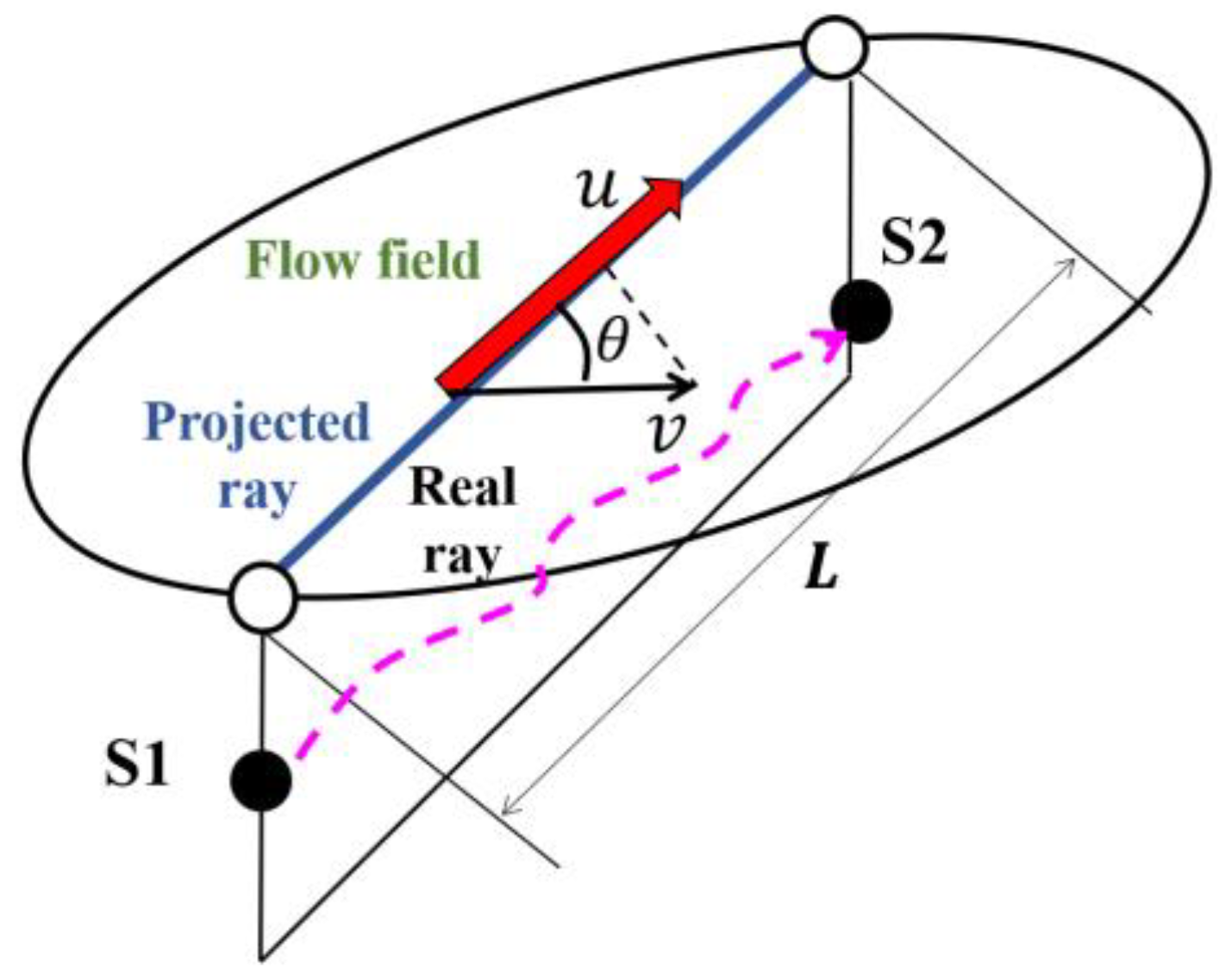
When the sound travels between two subsurface points, it is influenced by the current velocity and sound speed along a transmission path, resulting in different travel times in different directions. A pair of stations in the CAT experiment was composed of two acoustic stations (S1 and S2) (
Figure 1). The reciprocal sound transmission between acoustic stations S1 and S2 was sketched in
Figure 1. The transmission sound line between S1-S2 is projected onto the horizontal plane, and
u is the projection of the velocity
v in the direction of the transmission sound line. The travel time
t can be formulated as follows:
where
C0 represents the reference sound speed,
v is the velocity vector and
n is the unit vector along the transmission path. Δ
C is the deviation from
C0 caused by temperature variations.
and
are usually satisfied in the sea. The Taylor expansion is adopted to the denominator of Equation (1):
Taking the second Taylor expansion:
The second or higher-order terms can be ignored. Thus:
By taking the difference of
t+ and
t−, the differential travel time
becomes:
The 2-D velocity fields on a horizontal slice can be represented by the stream function, which expanded into a Fourier function series [
22]:
where
and
.
Equation (6) reduces in a matrix form:
where
the travel time vector is obtained in the experiment,
is the unknown coefficient vector to be solved,
e is the error vector, and
is the coefficient matrix. There is an inevitable error vector
e in practice at the right end of Equation (7), which is caused by the observation error and the inaccurate model description error.
Equation (7) is generally ill-posed often manifested in the instability of the solution, which cannot be solved using the usual linear algebraic methods. Therefore, the Tapered Least Square method accompanied by the L-curve method is required to solve the inversion problem [
17]. The cost function
J, which comprised data misfit and smoothness measure of solution vector
x, is given by Equation (8).
The coefficient represents the damping factor updated during each sound transmission process to make solutions much flexible to trace the dynamic underwater environments.
By singular value decomposition (SVD), transform matrix
E reduces:
where
u and
v represent the singular vector of
E and
is the corresponding eigenvalue.
,
, and
where
Ns depicts the number of nonzero singular values. By taking the
x-derivative of
J and setting it to zero, an expected solution can be obtained to minimize
J through a singular value decomposition, which is expressed by Equation (10).
The expected error vector
is
In this paper, the Tapered Least Square method was also used to damp or filter out noise in the high-frequency component thereby stabilizing the obtained solution.
2.2. The Influence of Position Accuracy
As shown in
Figure 1, the reciprocal travel times along a transmission path are formulated as:
where
t1 and
t2 denote the travel times from S1 to S2 and from S2 to S1, respectively.
Cm and
Vm denote the range-average sound speed and range-average velocity along the path, respectively.
L is the horizontal distance between the S1 and S2. Solving the coupled Equations (12) and (13), we obtain:
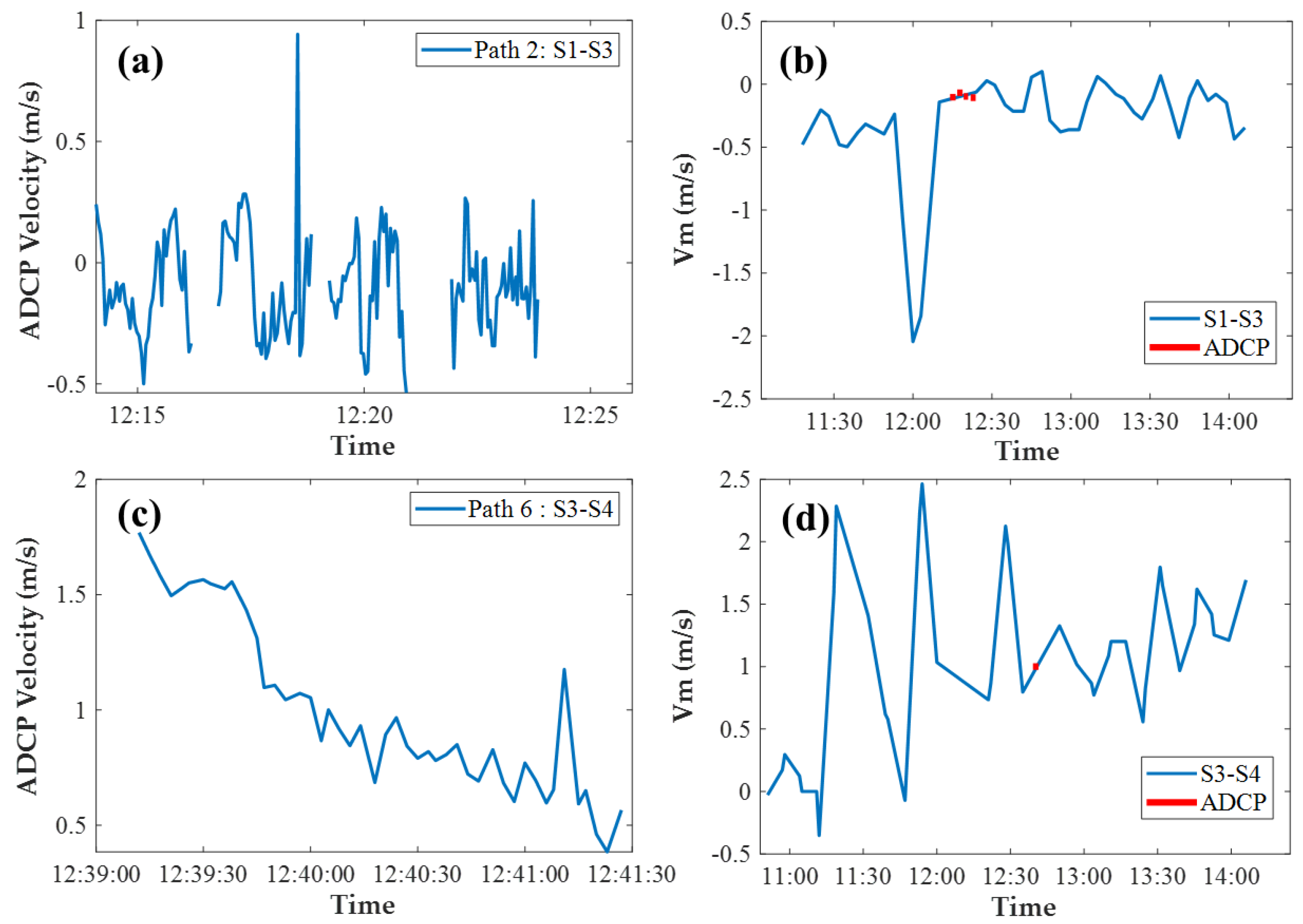
By calculating the range-average velocity
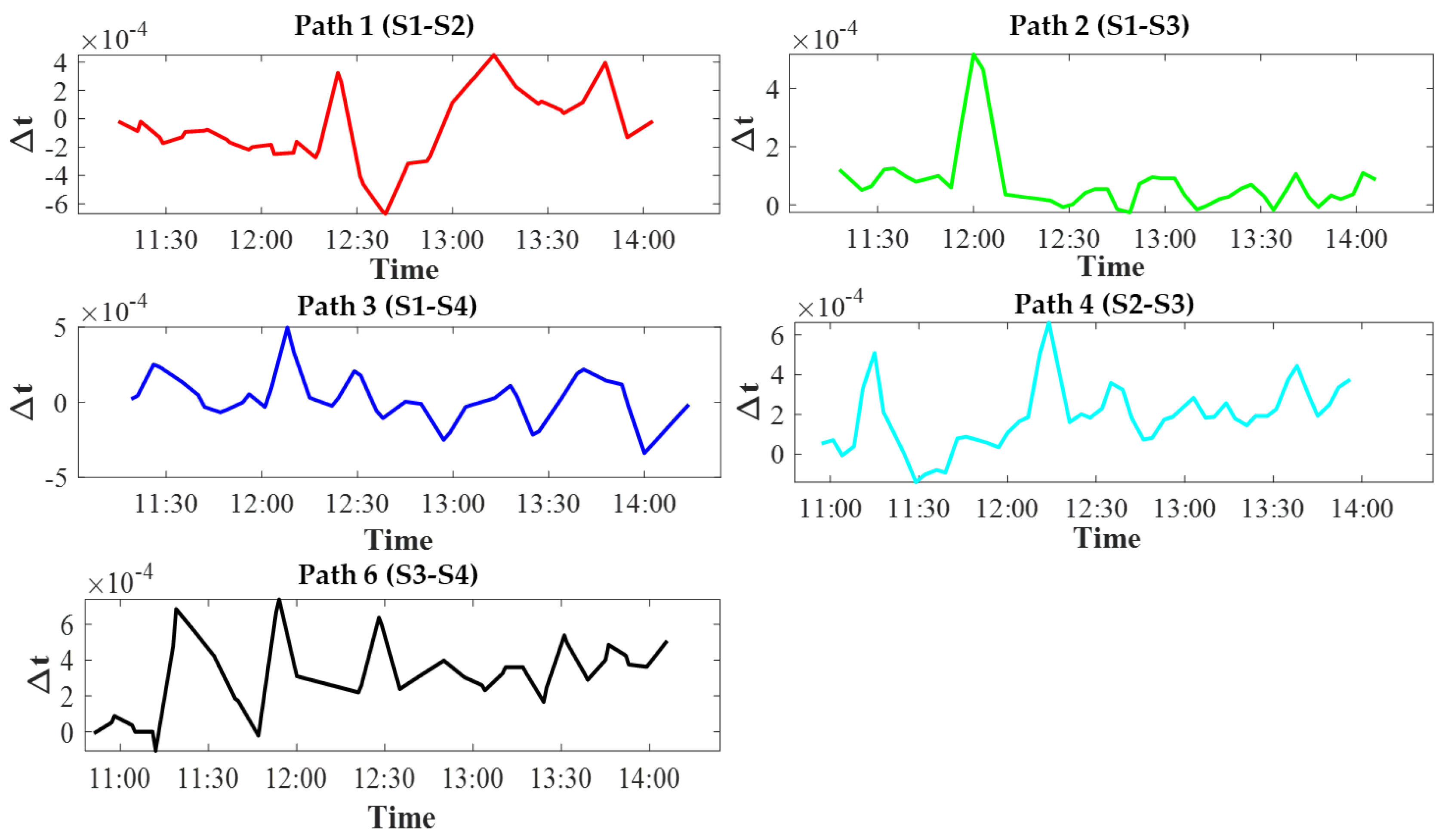
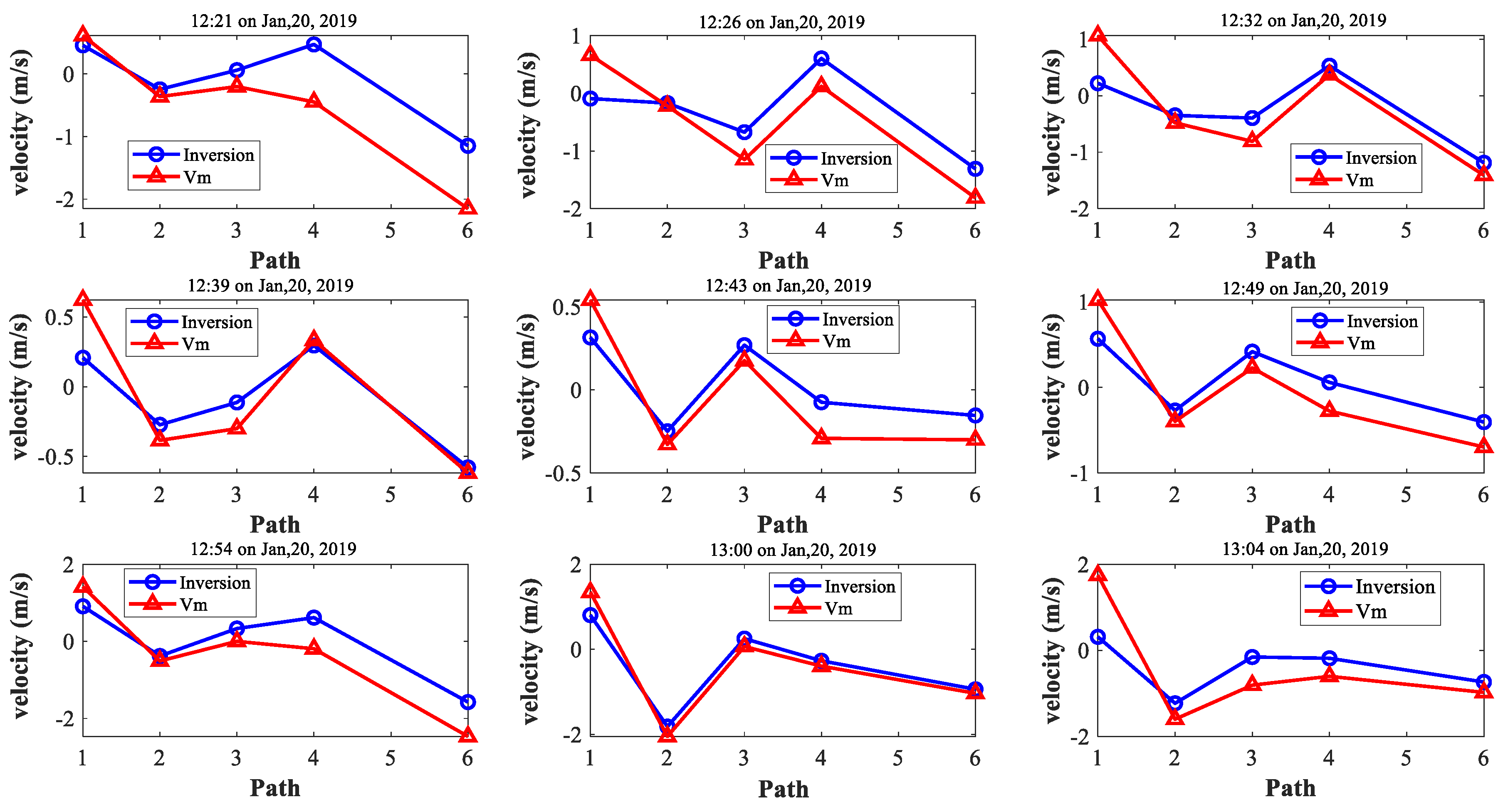
Vm of each path, a matrix can be formed to solve the velocity of any point in the observation domain. In addition, we can prove the correctness of CAT inversion results by comparing
Vm and the projection of the 2-D flow velocity field in this path, where Δ
t =
t2 −
t1.
t1 and
t2 are nearly equal to
tm. Taking the total derivatives of Equation (14), we obtain:
When the global positioning system (GPS) clock is used, the clock accuracy is as small as 0.6 μs and the second term on the right-hand side of Equation (15) is negligibly small. For
L = 100 m and
δL = 2 m [coming from GPS positioning errors],
and
δV = 0.02
Vm, showing that positioning error is not an important factor of velocity measurement. This means that the effect of positioning errors on velocity errors is negligibly small in the small-scale CAT observation. In contrast, temperature field measurement requires position correction using the method proposed by Zhang [
11].
2.3. Experiment Settings
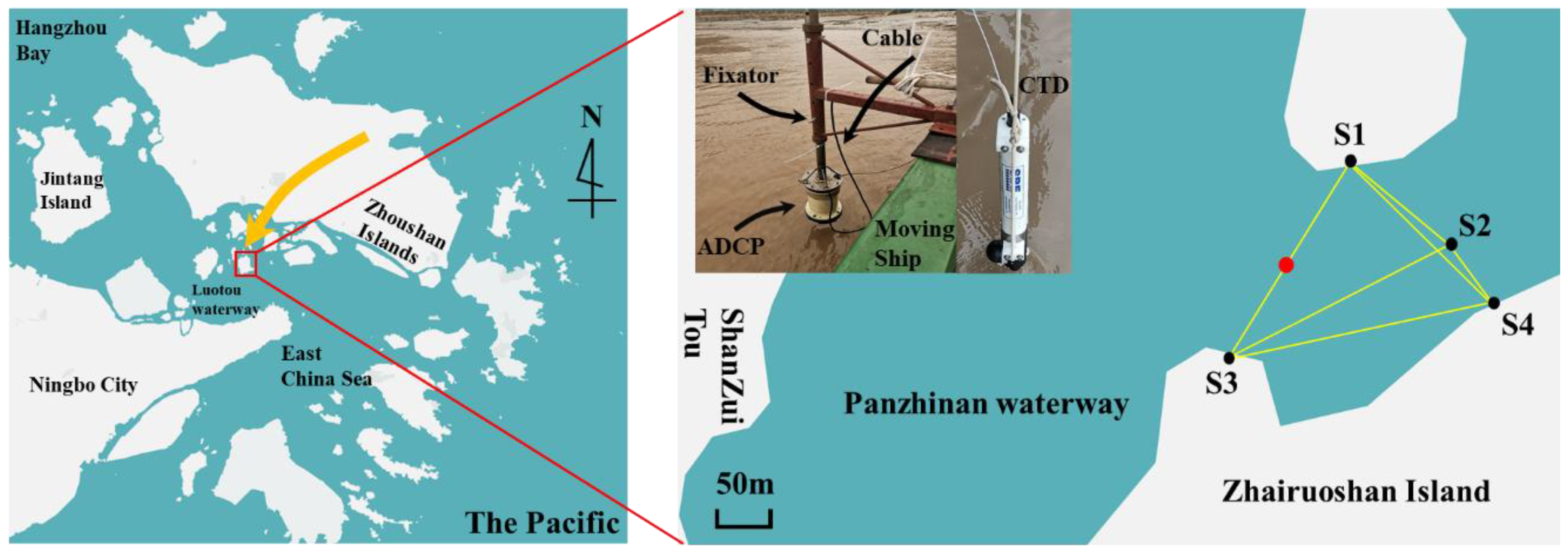
A CAT field experiment lasting 4 hours was conducted in the Panzhinan waterway near the Zhairuoshan Island, Zhoushan. The map of Zhairuoshan Island with adjacent regions and the CAT station array is shown in
Figure 2. The northern part of the Zhairuoshan Island was magnified in the right panel, which showed the 4 CAT stations (S1, S2, S3, and S4) and one conductivity–temperature–depth (CTD) cast location in the black and red solid circles, respectively. The yellow solid line was the transmission path of the sound line. The upper left of the right panel contained the shipboard acoustic Doppler current profiler (ADCP) and CTD, respectively. The water depths varied from 20 m at the northeastern part to 30 m at the southwestern part within the observation area. The ADCP was fixed on the ship with a fixator for collecting the velocity and bottom terrain data in a bottom-tracking mode. Additionally, limited information on the flow field was collected by the shipboard ADCP survey along several ship tracks crossing the observation region. The CTD cast was performed to measure the sound velocity and temperature profile in the observation region.
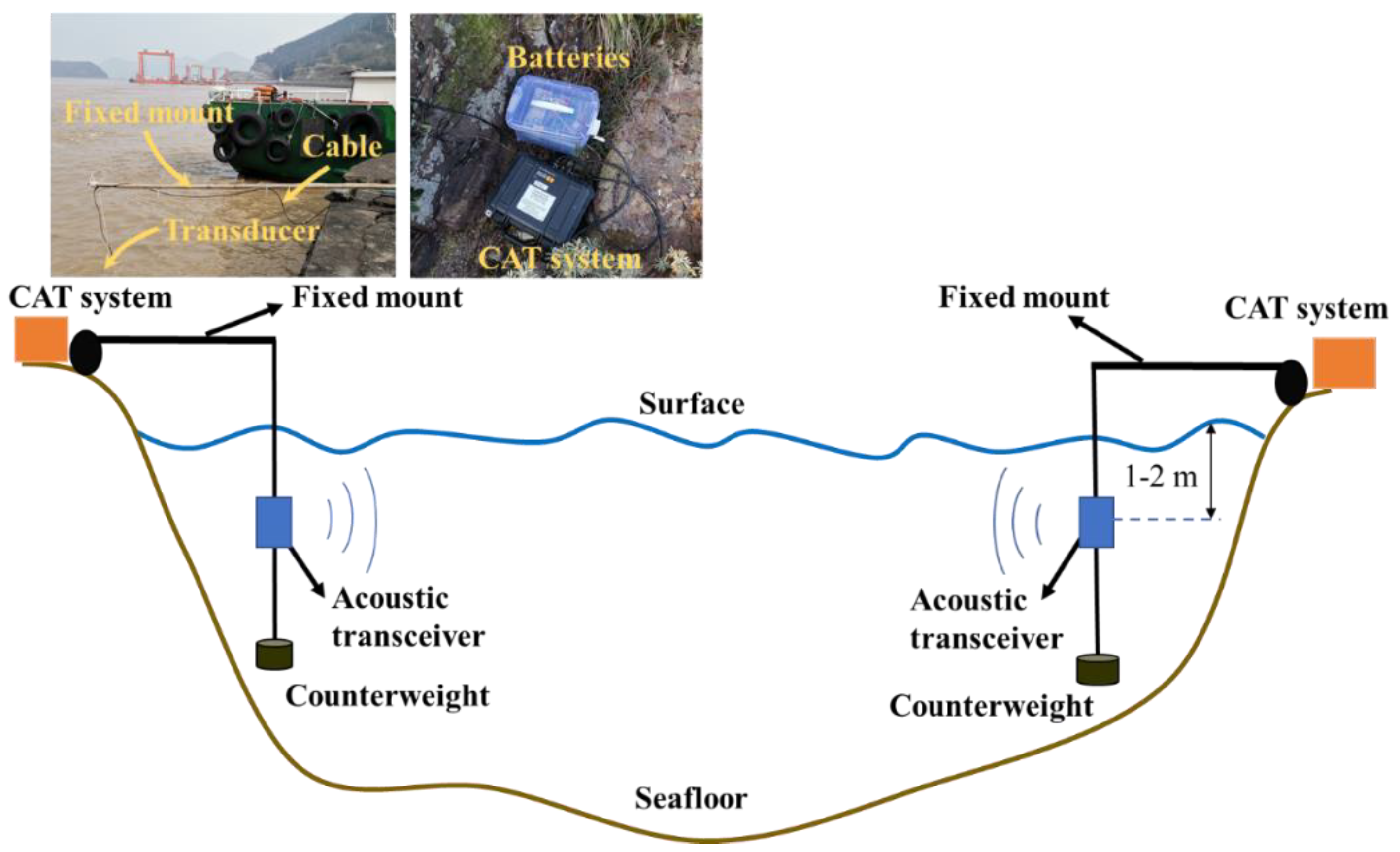
The CAT systems and batteries were arranged on the shore base (
Figure 3). The acoustic transceivers were hoisted by a rope under the water around 1-2 m together with a counterweight to prevent large position drift of acoustic transceiver due to the influence of the current. Whereas, the major components of the system, such as electronic housing, batteries, and the Global Positioning System (ANN-MS-0-005 GPS) antennas were placed on the shore. All stations were equipped with a GPS of high clock accuracy (less than 0.6 μs error) to synchronize the clock timing during transmission, reception, and AD conversion to correctly reconstruct the velocity fields. In addition, GPS provided clocked signals and provided station positioning data. The distances between the stations are listed in
Table 1.
In the short-range experiment, the signal design was vital and needed to be comprehensively considered. In the survey zone, it was inevitably interfered by various noises such as seabed topography and ship navigation, which required high precision and resolution of CAT. To obtain high resolution and high precision in small-scale area, a transceiver transducer with a central frequency of 50 kHz was adopted by the CAT systems. The acoustic transceiver used in the experiment configured signal transceiver modules for both transmitting and receiving acoustic signals, which implied more convenience for system integration of CAT.
Time resolution
tr can be represented as:
where
Q represents the number of cycles used by an M-sequence, and
f represents the carrier frequency (i.e., 50 kHz).
The transmission loss was increased with the increase of the frequency. For sake of the correct reception of signals and high SNR, the signal design of the short-range CAT test was indispensable. The length of the M
n is (2
n − 1), and the time length of the signal
ts can be expressed as:
where
n represents the order of M sequence. Equation (17) indicated that the signal length increases with the increase of the order of M sequence.
In Equation (18), the value of SNR is positively associated with the order of M sequence. Based on the preparatory experiment, different signals were tried to extract and match the multi-peak value. In addition, considering the significant environmental noises generated by ADCP-ship navigation and marine power generation platform, strong current and turbid water quality, one period of the 12th order M sequence was used to modulate with the 50 kHz carrier signal. During the experiment, the signal was transmitted at intervals of every 4 minutes from each acoustic transceiver and the signal repetition times (N) was 8.
According to Equation (17), when the 12th order M sequence was used, Q = 3, N = 8, ts = 1.9656 s. C0 = 1486.5 m/s, the transmission distance should be 2921.86 m as synchronous transmission used. Since the acoustic transceiver cannot perform the function of transmitting and receiving signals concurrently, the distance between CAT stations should be larger than the transmission distance to ensure the normal operation of the synchronous transmission. Therefore, in the case of short-range tests, the ordinary synchronous transmission cannot be obtained using a high order of M sequence.
As shown in
Table 2, a sound transmission based on a round-robin method was proposed to adopt the short-range test, which can benefit the normal reception of signals and obtain high SNR. Moreover, it solves the problem that each acoustic transceiver cannot perform the function of transmitting and receiving signals concurrently due to the short distance of the CAT station.
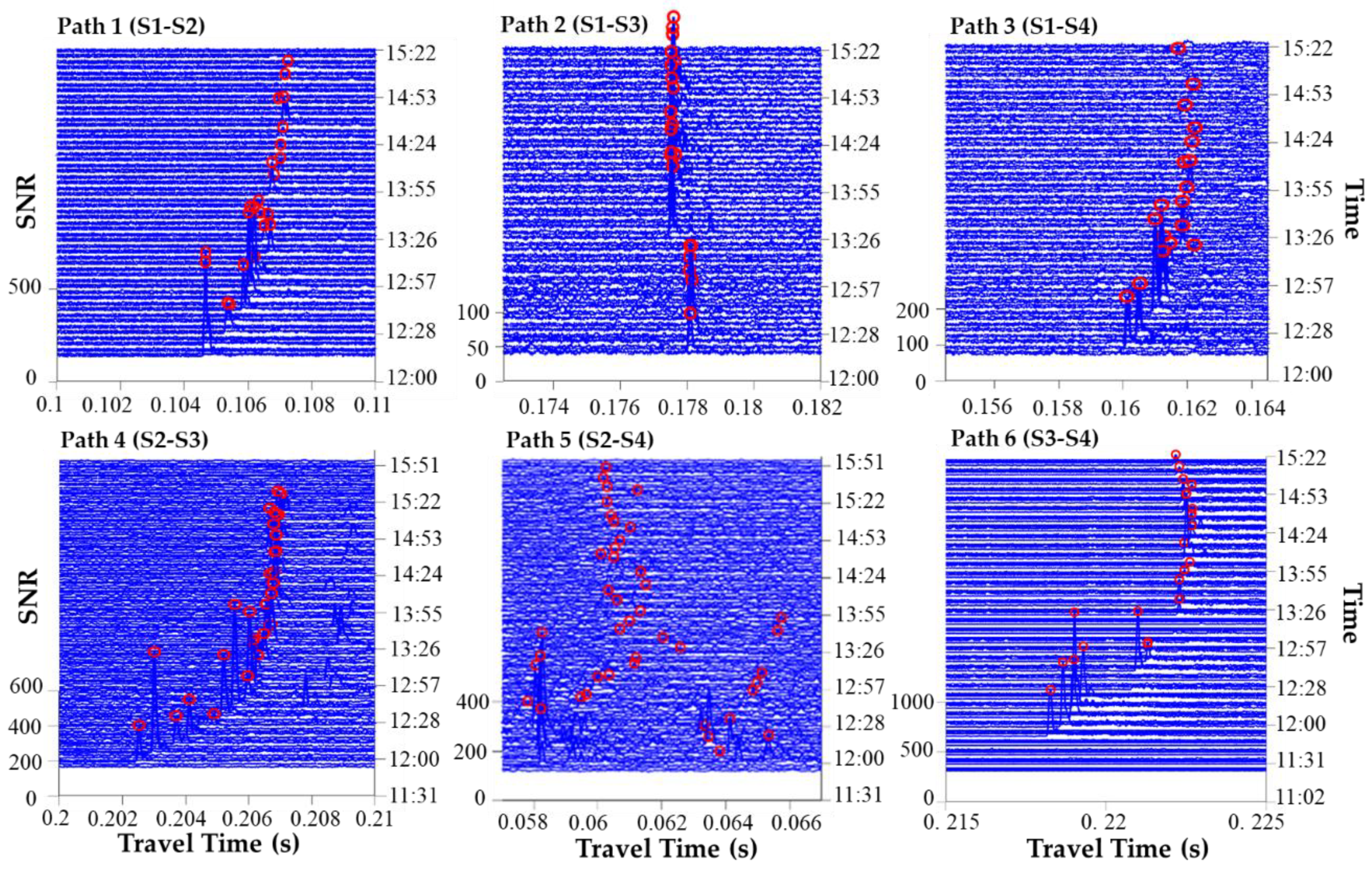
Arrival signals transmitted from each acoustic station were identified from the multiple stations based on M-sequences, which was allocated before the experiment. The sampling time window was enlarged to increase the data sampling number and decrease the influence of position drifting. Through the complex demodulation, the received signals were stored in the internal micro SD card. By taking a multiperiod transmission through the ensemble average of the successively received data, the SNR of the received data can be further improved.
2.4. Ray Simulation
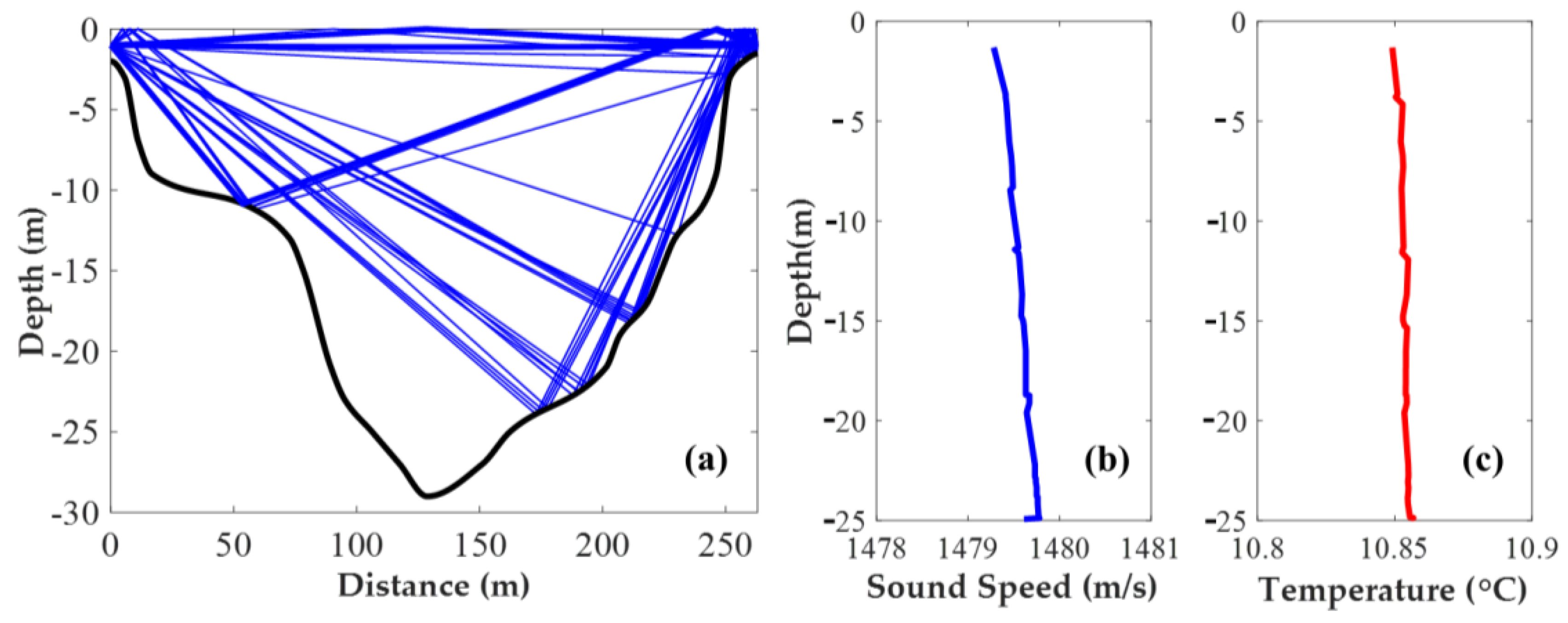
Figure 4a shows the ray patterns of S1-S3 in the range-independent ray simulation, which used the range-averaged sound–speed profile obtained from the CTD data during the CAT experiment. The three ray-patterns include: (1) the DR (direct) rays; (2) the SBR (Surface-bottom reflected) rays; and (3) the SR (Surface reflected) rays. The rays were almost straight lines in short-distance transmission, which can be applied to the approximate simulated station-to-station distances using the ray length (
Figure 4a). According to the ray simulation, it was found that the suitable rays in which reflection times were 1 or less could not be received when the depth was more than 25 m.
The first group of rays passing near the surface constructed the first arrival peaks, the characteristic of which map the 2-D horizontal velocity fields. The distances between the stations were calculated by the GPS data from the CAT systems. Despite the inevitable errors due to a few factors, including the GPS positioning that might cause distance error, the impact of position drifting on the horizontal flow field observation was negligibly small. Thus, even though extremely high-precision position information was not attained, the 2-D horizontal velocity fields could be reconstructed.
Based on pre-investigations, the velocity of seawater in the Panzhinan waterway was fast causing the seawater at different depths to be well mixed, there was no apparent temperature stratification in the survey zone and the temperature of the survey zone changed little with the depth. Therefore, the information obtained from a 1-point CTD cast should be sufficient to infer the small-scale tomographic domain in the present experiment. The CTD profile data including temperature and sound speed profiles are shown in
Figure 4b and c, respectively. The temperature increased with depth due to surface cooling in winter followed by the sound speed. Notably, water in the observation region was well homogenized horizontally because of the strong tidal currents. Hence, temperature stratification was significantly weak and assumed to be constant. Though the variation of salinity has a certain influence on the sound velocity, except for the river mouth, salinity variation is nearly equal to zero [
2].
4. Conclusions
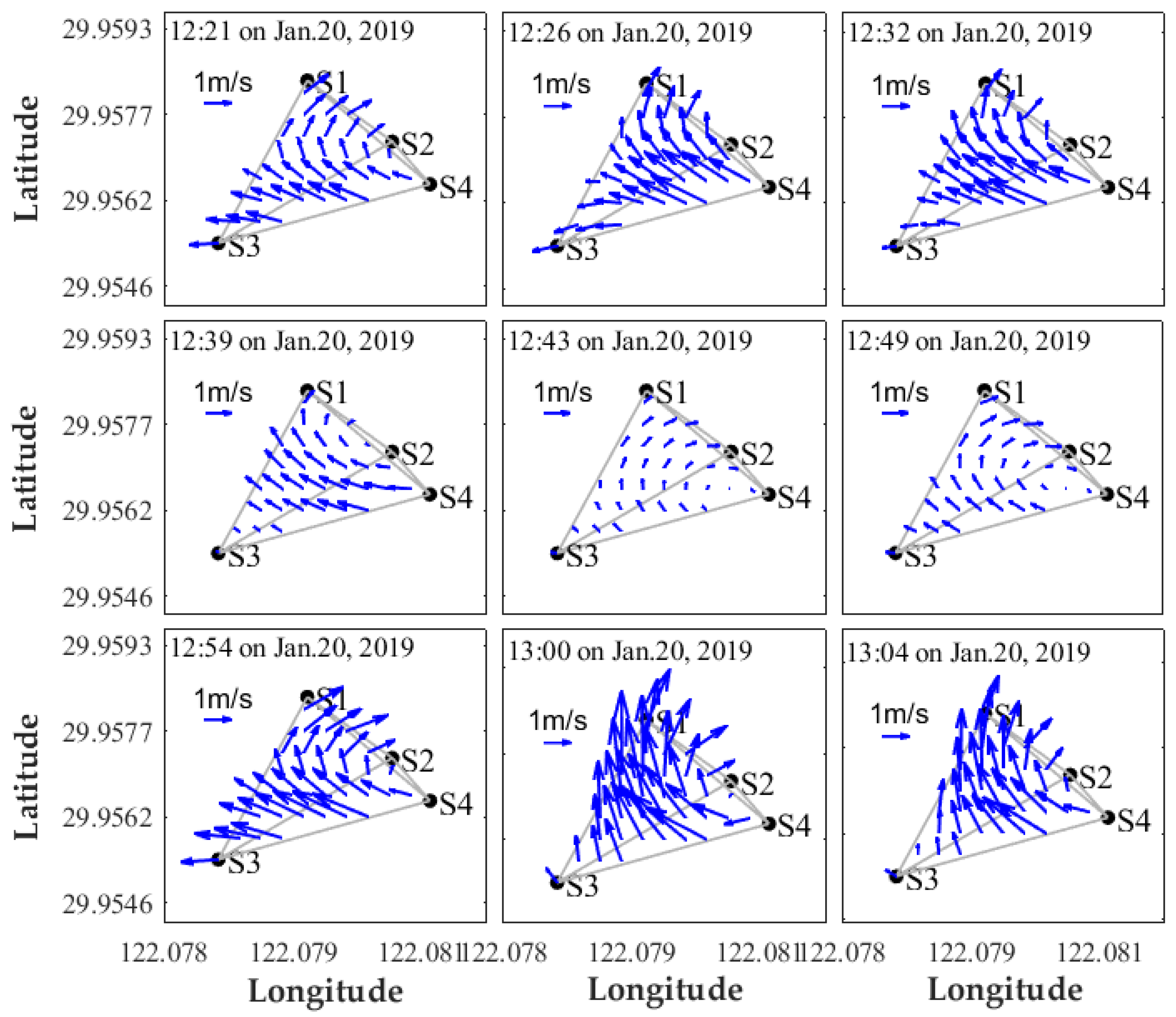
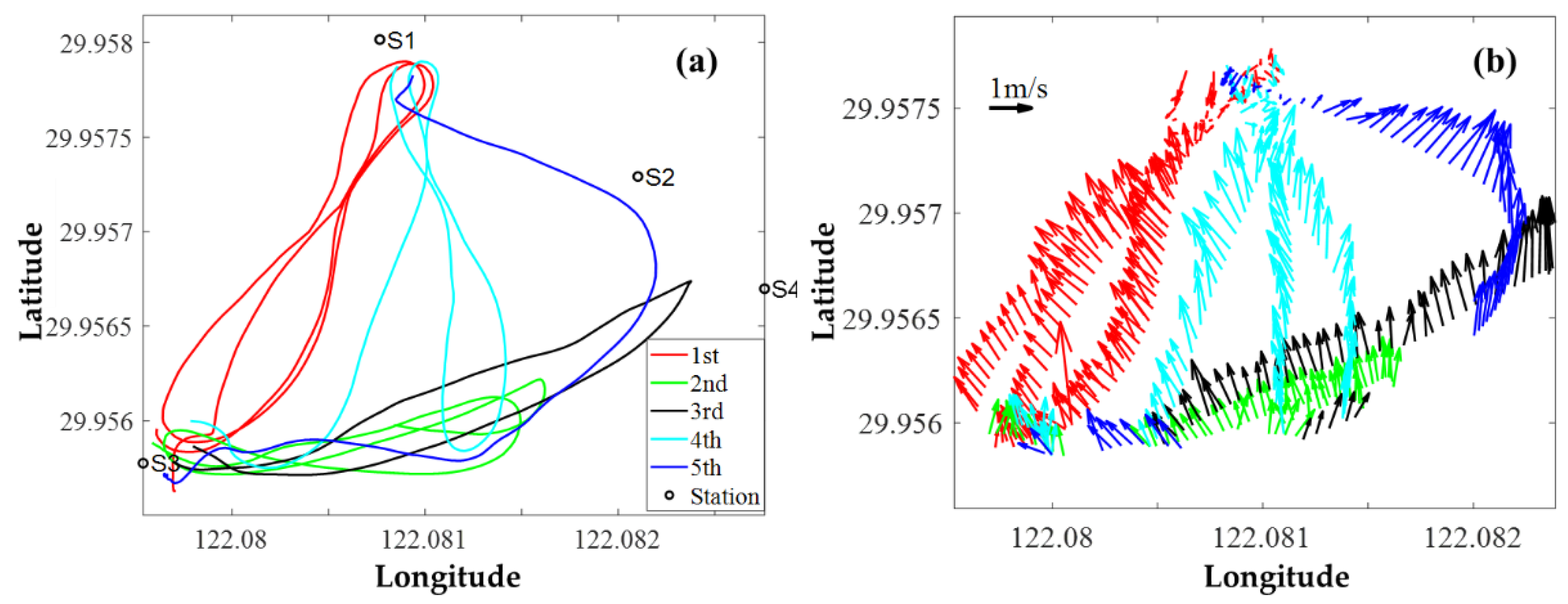
In conclusion, we performed the CAT experiment for mapping small-scale velocity structures using four CAT stations. Sound transmission based on the round-robin method was proposed for small-scale CAT observation. Moreover, the reciprocal sound transmission was performed along six transmission lines spanning the four CAT stations, while CTD casts were conducted to obtain temperature profiling as well as sound velocity data. Range-independent ray simulation based on the CTD data was performed to determine ray paths. The tomographic inversion based on the Tapered Least Square method was adopted to reconstruct horizontal velocity distributions with a differential travel time, and obtain continuous velocity variations mapping in a horizontal slice. The net volume of transport was calculated to examine the volume balance. We found that the estimated minimum net volume transport was 8.7 m3/s at 12:32, which was 1.63% of the total inflow volume transport. The average net volume transport was quite small compared to the maximum inflow volume transport (−12.6 m3/s vs 619.94 m3/s), indicating acceptable observational errors. The relative errors of the range-average velocity calculated by (S1-S3 and S3-S4) were 1.54% and 0.92%, respectively. The CAT results were in line with the range-average velocity calculated by differential travel time, which RMSE were 0.5163, 0.1494, 0.2103, 0.2804, and 0.2817 m/s for path 1, 2, 3, 4, and 6, respectively. Although the accuracy of results needed to be improved compared to the short-range laboratory experiment, the results from this first application of high-frequency 50 kHz CAT system were promising and verified that CAT might be a solution for small-scale observation. Additionally, we provided a reference for the signal design idea in small-scale CAT observation.
More emphasis is essential on the station layout, position drifting, arrival peak identification, the presence or absence of simultaneous transmission among other aspects to improve the accuracy of small-scale CAT observation. Moreover, further research should place much premium on the mapping of 3-D velocity fields based on the horizontal and vertical slices analyses.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}