
The Use of Green Laser in LiDAR Bathymetry: State of the Art and Recent Advancements


Abstract
:1. Introduction
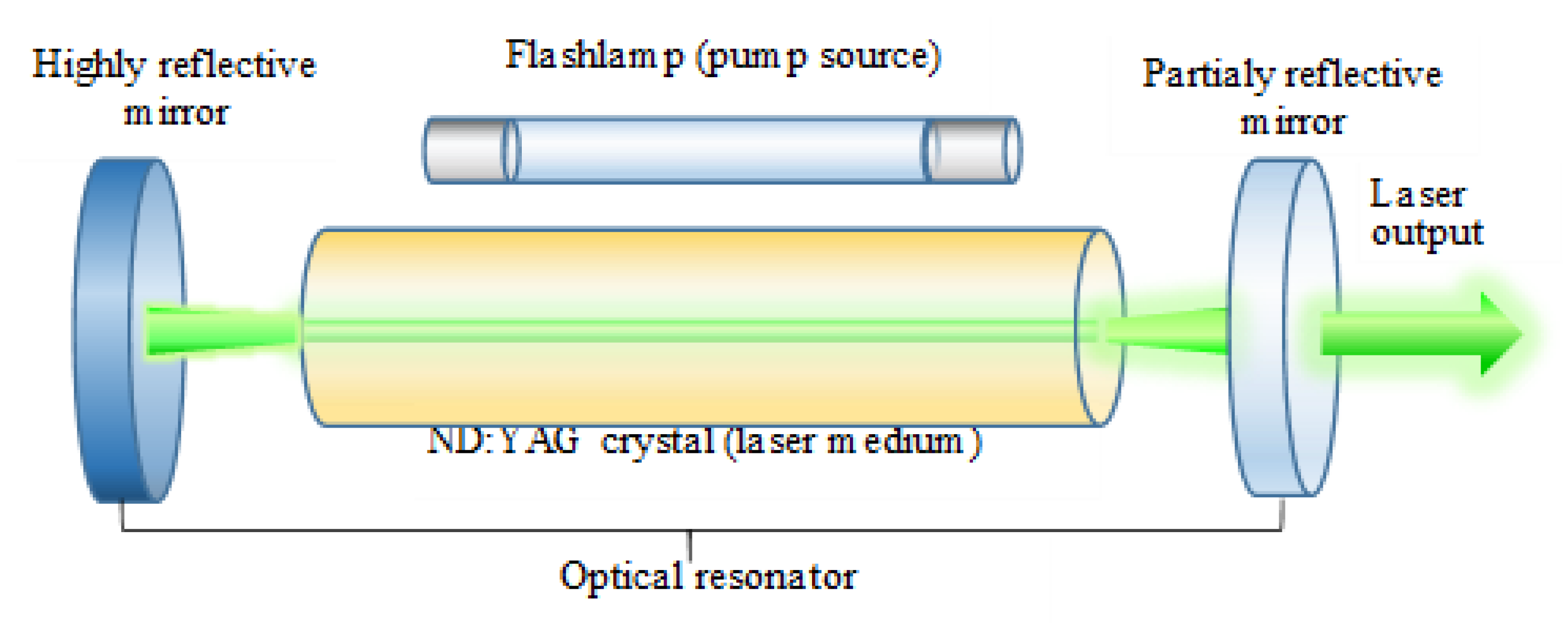
2. The Principle of the Green Laser Operation
3. The Use of a Green Laser in Airborne LiDAR Systems
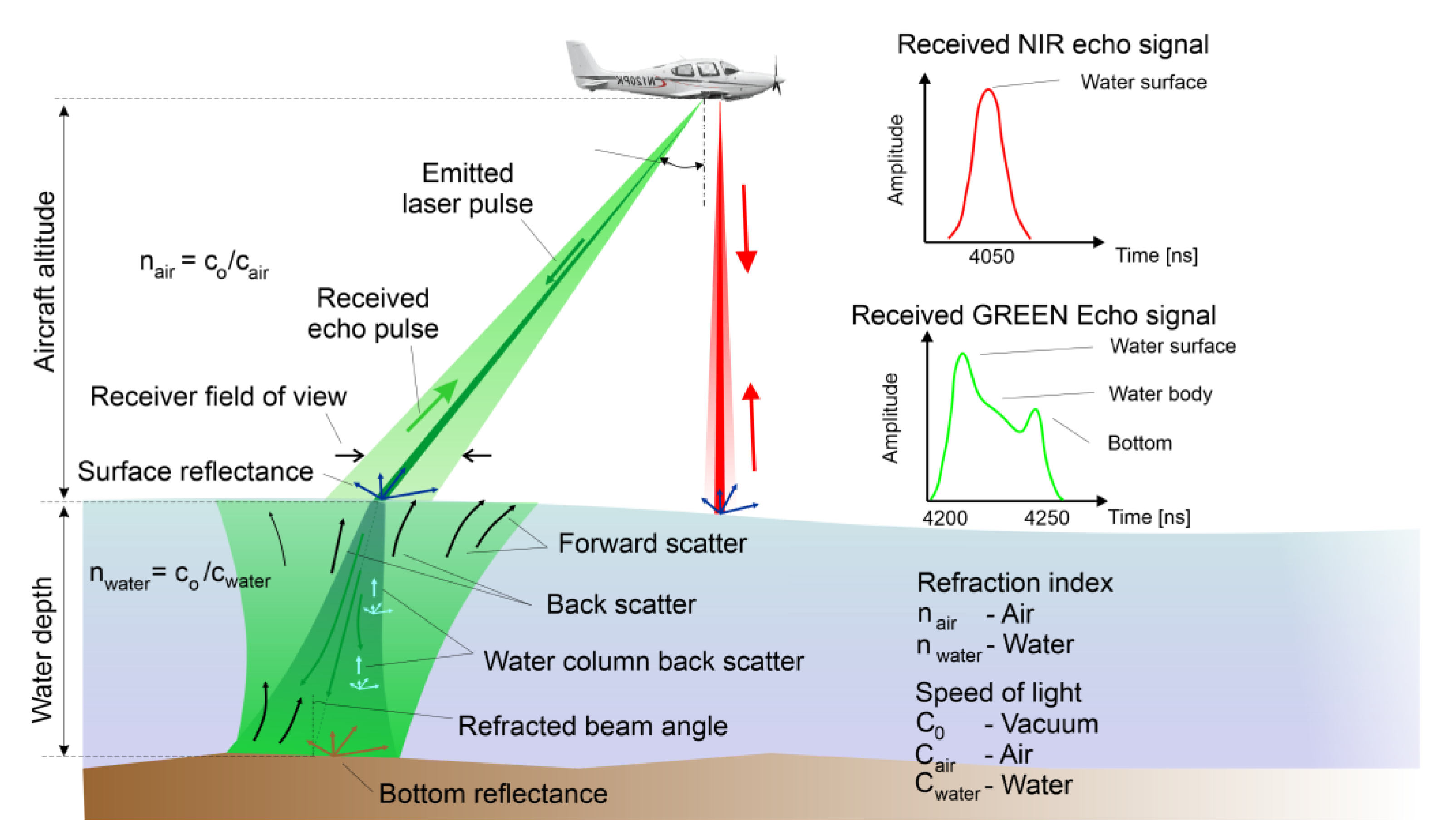
3.1. LiDAR Bathymetry
3.1.1. Data Processing
- georeferencing raw ALB data,
- noise removal and cloud point classification,
- refraction correction.
- 1-Unclassified,
- 2-Ground,
- 7-Noise,
- 25-Water Column,
- 26-Bathymetric Bottom or Submerged Topography,
- 29-Submerged feature,
- 30-Submerged Aquatic Vegetation,
- 31-Temporal Bathymetric Bottom.
- Echo detection: this is a group of methods that does not take into account the radiometric features of targets, but locates echoes by a direct indicator, e.g., a threshold, center of gravity, zero crossing of the second derivatives [45].
- Mathematical approximation: consisting in fitting mathematical functions to the LiDAR waveform with parameters that allow to determine the position of the targets. Gaussian function sets, lognormal function, or Weibull function [46] are widely used.
3.1.2. Review of Bathymetric Scanners
4. Use of LiDAR Bathymetry
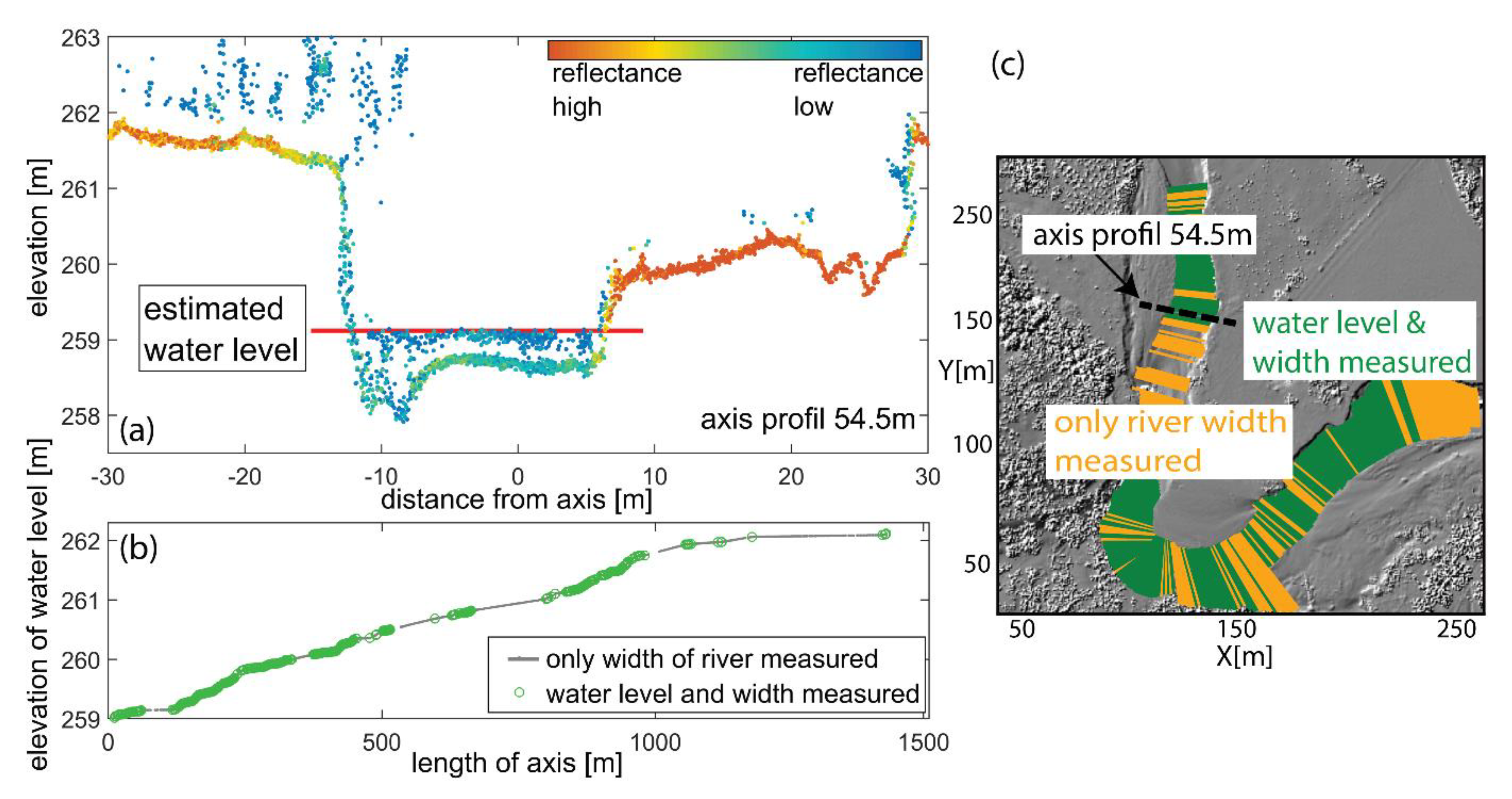
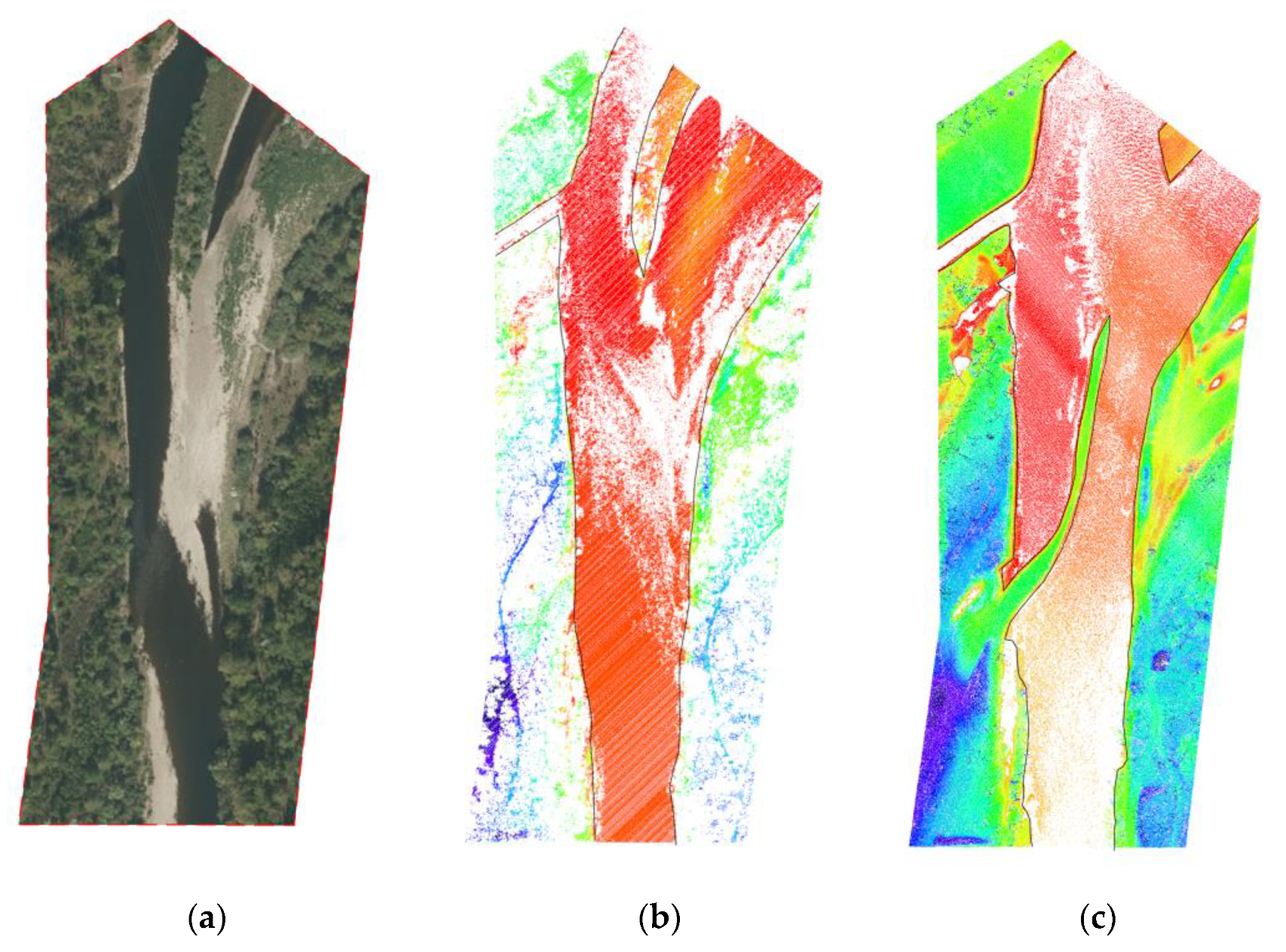
4.1. Application for Measuring River Crosses and Fluvial Processes
- river erosion, i.e., cutting into the Earth’s surface, we distinguish erosion: deep, backward and lateral,
- transport or transport of rock material downstream of the river,
- accumulation, that is, the deposition of material carried by the river.
4.2. Application to Measurement of Shallow Offshore Sea Zones and Abrasion
- by the state administration responsible for the safety of the seashore in order to select appropriate methods of its protection against erosion;
- with safe planning of investments in the coastal zone and preparation of sea space development plans;
- by local self-government authorities when verifying spatial development plans of seaside towns and making prudent decisions as part of integrated coastal zone management.
5. Directions of Bathymetric LiDAR Development
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, J.; Lin, J.; Ma, M.; Liao, X. Mapping topo-bathymetry of transparent tufa lakes using UAV-based photogrammetry and RGB imagery. Geomorphology 2021, 389, 107832. [Google Scholar] [CrossRef]
- Szombara, S.; Lewińska, P.; Żądło, A.; Róg, M.; Maciuk, K. Analyses of the Prądnik riverbed shape based on archival and contemporary data sets—old maps, LiDAR, DTMs, orthophotomaps and cross-sectional profile measurements. Remote Sens. 2020, 12, 2208. [Google Scholar] [CrossRef]
- Li, S.; Su, D.; Yang, F.; Zhang, H.; Wang, X.; Guo, Y. Bathymetric LiDAR and multibeam echo-sounding data registration methodology employing a point cloud model. Appl. Ocean. Res. 2022, 123, 103147. [Google Scholar] [CrossRef]
- Directive 2000/60/EC of the European Parliament and of the Council of 23 October 2000 Establishing a Framework for Community Action in the Field of Water Policy. Available online: http://data.europa.eu/eli/dir/2000/60/oj (accessed on 29 October 2022).
- Bieda, A.; Hycner, R. Changes in the shape of the river-bed over a period of time at the base of the Vistula river before Cracow. Geomat. Environ. Eng. 2012, 6, 21–28. [Google Scholar] [CrossRef] [Green Version]
- Kasvi, E.; Salmela, J.; Lotsari, E.; Kumpula, T.; Lane, S.N. Comparison of remote sensing based approaches for mapping bathymetry of shallow, clear water rivers. Geomorphology 2019, 333, 180–197. [Google Scholar] [CrossRef]
- McCarthy, M.J.; Otis, D.B.; Hughes, D.; Muller-Karger, F.E. Automated high-resolution satellite-derived coastal bathymetry mapping. Int. J. Appl. Earth Obs. Geoinf. 2022, 107, 102693. [Google Scholar] [CrossRef]
- Phinn, S.; Roelfsema, C.; Dekker, A.; Brando, V.; Anstee, J. Mapping seagrass species, cover and biomass in shallow waters: An assessment of satellite multi-spectral and airborne hyper-spectral imaging systems in Moreton Bay (Australia). Remote Sens. Environ. 2008, 112, 3413–3425. [Google Scholar] [CrossRef]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters—A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Velasco, J.; Molina, I.; Martinez, E.; Arquero, Á.; Prieto, J.F. Sea Bottom Classification by Means of Bathymetric LiDAR Data. IEEE Lat. Am. Trans. 2014, 12, 590–595. [Google Scholar] [CrossRef]
- Gawałkiewicz, R.; Madusiok, D. The Bagry Reservoir. Pt. 3, The application of hydro-drone Smart-Sonar-Boat in bathymetric measurements of inaccessible water areas. Geoinformatica Pol. 2018, 17, 17–30. [Google Scholar] [CrossRef]
- Gallant, J.; Austin, J. Stitching fine resolution dems. In 18th World IMACS Congress and MODSIM09 International Congress on Modelling and Simulation, July 2009; Anderssen, R., Braddock, R., Newham, L., Eds.; Modelling and Simulation Society of Australia and New Zealand and International Association for Mathematics and Computers in Simulation: Cairns, Australia, 2009; pp. 2486–2492. [Google Scholar]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing Near Water Surface Penetration in Laser Bathymetry—A Case Study at the River Pielach. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 175–180. [Google Scholar] [CrossRef] [Green Version]
- Guenther, G.C.; Cunningham, A.; Laroque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne LiDAR bathymetry. In Proceedings of the 20th EARSeL Symposium: Workshop on LiDAR Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000. [Google Scholar]
- Jóźwicki, R. Laser Technique and Its Applications; Oficyna Wydawnicza Politechniki Warszawskiej: Warszawa, Poland, 2009; 222p. (In Polish) [Google Scholar]
- Idris, M.S.; Siang, H.L.; Amin, R.M.; Sidik, M.J. Two-decade dynamics of MODIS-derived Secchi depth in Peninsula Malaysia waters. J. Mar. Syst. 2022, 236, 103799. [Google Scholar] [CrossRef]
- Erena, M.; Atenza, J.F.; García-Galiano, S.; Domínguez, J.A.; Bernabé, J.M. Use of Drones for the Topo-Bathymetric Monitoring of the Reservoirs of the Segura River Basin. Water 2019, 11, 445. [Google Scholar] [CrossRef] [Green Version]
- ARGANS. Satellite Derived Bathymetry. Measuring Water Depth from Space& Drafting Nautical Charts. Available online: https://sdb.argans.co.uk/ (accessed on 29 October 2022).
- Toth, C.K. LiDAR Waveform in Mobile Mapping. In Proceedings of the 7th International Symposium on Mobile Mapping Technology, Cracow, Poland, 13–16 June 2011. [Google Scholar]
- Mandlburger, G.; Pfennigbauer, M.; Steinbacher, F.; Pfeifer, N. Airborne hydrographic LiDAR mapping—Potential of a new technique for capturing shallow water bodies. In Proceedings of the 19th International Congress on Modelling and Simulation, Perth, Australia, 12–16 December 2011. [Google Scholar]
- Wang, C.K.; Philpot, W.D. Using airborne bathymetric LiDAR to detect bottom type variation in shallow waters. Remote Sens. Environ. 2007, 106, 123–135. [Google Scholar] [CrossRef]
- Hickman, G.D.; Hogg, J.E. Application of an airborne pulsed laser for near shore bathymetric measurements. Remote Sens. Environ. 1969, 1, 47–58. [Google Scholar] [CrossRef]
- Hilldale, R.C.; Raff, D. Assessing the ability of airborne LiDAR to map river bathymetry. Earth Surf. Process. Landf. 2008, 33, 773–783. [Google Scholar] [CrossRef]
- Quadros, N.D.; Collier, P.A.; Fraser, C.S. Integration of Bathymetric and topographic LiDAR: A preliminary investigation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37 Pt B8, 1299–1304. [Google Scholar]
- Steinbacher, F.; Pfennigbauer, M.; Aufleger, M.; Ullrich, A. High resolution airborne shallow water mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B1, 55–60. [Google Scholar] [CrossRef] [Green Version]
- Jennifer, L.I.; Lillycrop, W.J. Monitoring New Pass, Florida, with High Density LiDAR Bathymetry. J. Coast. Res. 1997, 13, 1130–1140. [Google Scholar]
- Sandwell, D.T.; Smith, W.H.F.; Gille, S.; Kappel, E.; Jayne, S.; Soofi, K.; Coakley, B.; Géli, L. Bathymetry from space: Rationale and requirements for a new, high-resolution altimetric mission. Comptes Rendus Geosci. 2006, 338, 1049–1062. [Google Scholar] [CrossRef] [Green Version]
- Abdallah, H. Wa-LiD: A New LiDAR Simulator for Waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef] [Green Version]
- Churnside, J.H. Review of profiling oceanographic LiDAR. Opt. Eng. 2014, 53, 051405. [Google Scholar] [CrossRef]
- Vasilkov, A.P.; Goldin, Y.A.; Gureev, B.A. Airborne polarized LiDAR detection of scattering layers in the ocean. Appl. Opt. 2001, 40, 4353–4364. [Google Scholar] [CrossRef] [PubMed]
- Guenther, G.C. Airborne LiDAR Bathymetry. In Digital Elevation Model Technologies and Applications: The Dem User’s Manual, 2nd ed.; Maune, D.F., Ed.; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2007; pp. 253–320. [Google Scholar]
- Kopilevich, Y.I.; Feygals, V.I.; Tuell, G.H.; Surkov, A. Measurement of ocean water optical properties and seafloor reflectance with Scanning Hydrographic Operational Airborne LIDAR Survey (SHOALS): I. Theoretical Background. In Optics & Photonics 2005; International Society for Optics and Photonics: San Diego, CA, USA, 2005; pp. 58850D-1–58850D-9. [Google Scholar]
- Tuell, G.H.; Park, J.Y. Use of SHOALS bottom reflectance images to constrain the inversion of a hyperspectral radiative transfer model. In Defense and Security; International Society for Optics and Photonics: San Diego, CA, USA, 2004; pp. 185–193. [Google Scholar]
- Tuell, G.H.; Feygels, V.; Kopilevich, Y.; Weidemann, A.D.; Cunningham, A.G.; Mani, R.; Aitken, J. Measurement of ocean water optical properties and seafloor reflectance with Scanning Hydrographic Operational Airborne LIDAR Survey (SHOALS): II. Practical results and comparison with independent data. In Optics & Photonics 2005; International Society for Optics and Photonics: San Diego, CA, USA, 2005; pp. 58850E-1–58850E-13. [Google Scholar]
- Tuell, G.; Carr, D. New Procedure for Estimating Field-of-View Loss in Bathymetric LIDAR. In Imaging Systems and Applications; Optical Society of America: Arlington, VA, USA, 2013. [Google Scholar]
- Collin, A.; Archambault, P.; Long, B. Mapping the Shallow Water Seabed Habitat with the SHOALS. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2947–2955. [Google Scholar] [CrossRef]
- Guenther, G.C.; Brooks, M.W.; LaRocque, P.E. New Capabilities of the “SHOALS” Airborne LiDAR Bathymeter. Remote Sens. Environ. 2000, 73, 247–255. [Google Scholar] [CrossRef]
- Kutser, T.; Miller, I.; Jupp, D.L.B. Mapping coral reef benthic substrates using hyperspectral space-borne images and spectral libraries. Estuar. Coast. Shelf Sci. 2006, 70, 449–460. [Google Scholar] [CrossRef]
- Renslow, M.S. (Ed.) Manual of Airborne Topographic LiDAR; American Society for Photogrammetry Remote Sensing: Bethesda, MD, USA, 2012. [Google Scholar]
- Janowski, L.; Wroblewski, R.; Rucinska, M.; Kubowicz-Grajewska, A.; Tysiac, P. Automatic classification and mapping of the seabed using airborne LiDAR bathymetry. Eng. Geol. 2022, 301, 106615. [Google Scholar] [CrossRef]
- National Geodetic Survey. 2018 NOAA National Geodetic Survey Topobathy LiDAR: Potomac River, Chesapeake Bay from 15 June 2010 to 18 August 2010. NOAA National Centers for Environmental Information. 2022. Available online: https://www.fisheries.noaa.gov/inport/item/56114 (accessed on 29 October 2022).
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Wu, J.; van Aardt, J.; Asner, G.P. A comparison of signal deconvolution algorithms based on small-footprint LiDAR waveform simulation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2402–2414. [Google Scholar] [CrossRef]
- Parrish, C.E.; Jeong, I.; Nowak, R.D.; Smith, R.B. Empirical comparison of full-waveform LiDAR algorithms: Range extraction and discrimination performance. Photogramm. Eng. Remote Sens. 2011, 77, 824–838. [Google Scholar] [CrossRef]
- Wagner, W.; Ullrich, A.; Melzer, T.; Briese, C.; Kraus, K. From single-pulse to full-waveform airborne laser scanners: Potential and practical challenges. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35 Pt B3, 201–206. [Google Scholar]
- Chauve, A.; Mallet, C.; Bretar, F.; Durrieu, S.; Deseilligny, M.P.; Puech, W. Processing full-waveform LiDAR data: Modelling raw signals. In Proceedings of the International Society for Photogrammetry and Remote Sensing (ISPRS) Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, 12–14 September 2007; pp. 102–107. [Google Scholar]
- Ding, K.; Li, Q.; Zhu, J.; Wang, C.; Guan, M.; Chen, Z.; Yang, C.; Cui, Y.; Liao, J. An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric LiDAR Waveforms. Sensors 2018, 18, 552. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- International Hydrographic Organization. IHO Standards for Hydrographic Surveys, 5th ed.Special Publication No. 44.; International Hydrographic Bureau: Monte Carlo, Monaco, 2008. [Google Scholar]
- Su, D.; Yang, F.; Ma, Y.; Wang, X.H.; Yang, A.; Qi, C. Propagated uncertainty models arising from device, environment, and target for a small laser spot Airborne LiDAR Bathymetry and its verification in the South China Sea. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3213–3231. [Google Scholar] [CrossRef]
- Birkebak, M.; Eren, F.; Peeri, S.; Weston, N. The effect of surface waves on Airborne LiDAR Bathymetry (ALB) measurement uncertainties. Remote Sens. 2018, 10, 453. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Li, N.; Xie, X.; Bao, C.; Li, X.; Li, D. A fast analysis method for bluegreen laser transmission through the sea surface. Sensor 2020, 20, 1758. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Westfeld, P.; Richter, K.; Maas, H.-G.; Weiβ, R. Analysis of the effect of wave patterns on refraction in Airborne LiDAR Bathymetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 133–139. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Guo, K.; Liu, Y.; Tian, Z.; Tang, Q.; Dong, Z.; Li, J. Refraction error correction of Airborne LiDAR Bathymetry data considering sea surface waves. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102402. [Google Scholar] [CrossRef]
- Quadros, N. Unlocking the Characteristics of Bathymetric LiDAR Sensors. LiDAR Magzine 2013, 3, 62–67. [Google Scholar]
- National Enhanced Elevation Assessment Final Report. Available online: https://www.dewberry.com/services/geospatial-mapping-and-survey/national-enhanced-elevation-assessment-final-report (accessed on 1 November 2022).
- Wright, C.W.; Brock, J.C. EAARL: A LiDAR for Mapping Shallow Coral Reefs and Other Coastal Environments. In Proceedings of the Seventh International Conference on Remote Sensing for Marine and Coastal Environments, Miami, FL, USA, 20 May 2002. [Google Scholar]
- CZMIL SuperNova. Available online: http://www.teledyneoptech.com/en/products/airborne-survey/czmil-supernova/ (accessed on 1 November 2022).
- Experimental Advanced Airborne Research LiDAR (EAARL) Data Processing Manual. Available online: https://www.usgs.gov/publications/experimental-advanced-airborne-research-LiDAR-eaarl-data-processing-manual (accessed on 1 November 2022).
- Fugro LADS Mk 3 ALB System. Available online: https://data.ngdc.noaa.gov/instruments/remote-sensing/active/profilers-sounders/LiDAR-laser-sounders/Fugro-LADS-Mk3.pdf (accessed on 1 November 2022).
- Leica HawkEye 4X Deep Bathymetric LiDAR Sensor. Available online: https://leica-geosystems.com/products/airborne-systems/bathymetric-LiDAR-sensors/leica-hawkeye (accessed on 1 November 2022).
- Riegl BathyCopter. Available online: https://www.laser-3d.pl/riegl-uav/bathycopter/ (accessed on 1 November 2022).
- Schmidt, A.; Rottensteiner, F.; Soergel, U. Classification of airborne laser scanning data in wadden sea areas using conditional random fields. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXIX-B3, 161–166. [Google Scholar] [CrossRef] [Green Version]
- Tysiąc, P. Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic. Remote Sens. 2020, 12, 3740. [Google Scholar] [CrossRef]
- Bailly, J.S.; le Coarer, Y.; Languille, P.; Stigermark, C.J.; Allouis, T. Geostatistical estimations of bathymetric LiDAR errors on rivers. Earth Surf. Process. Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Feurer, D.; Bailly, J.S.; Puech, C.; le Coarer, Y.; Viau, A.A. Very-high-resolution mapping of river-immersed topography by remote sensing. Prog. Phys. Geogr. 2008, 32, 403–419. [Google Scholar] [CrossRef]
- Gręplowska, Z.; Korpak, J.; Lenar-Matyas, A. Fundamentals of River Geomorphology and Morphodynamics; PK Publishing House: Cracow, Poland, 2022; 153p. [Google Scholar]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Merz, J.; Pasternack, G.B.; Sear, D.; Vericat, D. Linking geomorphic changes to salmonid habitat at a scale relevant to fish. River Res. Appl. 2010, 26, 469–486. [Google Scholar] [CrossRef]
- Brasington, J.; Rumsby, B.T.; McVey, R.A. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Process. Landf. 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Merz, J.E.; Pasternack, G.B.; Wheaton, J.M. Sediment budget for salmonid spawning habitat rehabilitation in a regulated river. Geomorphology 2006, 76, 207–228. [Google Scholar] [CrossRef]
- Heritage, G.; Hetherington, D. Towards a protocol for laser scanning in fluvial geomorphology. Earth Surf. Process. Landf. 2007, 32, 66–74. [Google Scholar] [CrossRef]
- Hodge, R.; Brasington, J.; Richards, K. Analysing laser-scanned digital terrain models of gravel bed surfaces: Linking morphology to sediment transport processes and hydraulics. Sedimentology 2009, 56, 2024–2043. [Google Scholar] [CrossRef]
- Notebaert, B.; Verstraeten, G.; Govers, G.; Poesen, J. Qualitative and quantitative applications of LiDAR imagery in fluvial geomorphology. Earth Surf. Process. Landf. 2009, 34, 217–231. [Google Scholar] [CrossRef]
- Marcus, W.A.; Fonstad, M.A. Optical remote mapping of rivers at sub-meter resolutions and watershed extents. Earth Surf. Process. Landf. 2008, 33, 4–24. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Roberts, D.A.; Lawrence, R.L. Spectrally based remote sensing of river bathymetry. Earth Surf. Process. Landf. 2009, 34, 1039–1059. [Google Scholar] [CrossRef]
- Legleiter, C.J. Remote measurement of river morphology via fusion of LiDAR topography and spectrally based bathymetry. Earth Surf. Process. Landf. 2012, 37, 499–518. [Google Scholar] [CrossRef]
- Williams, R.D.; Brasington, J.; Vericat, D.; Hicks, D.M. Hyperscale terrain modelling of braided rivers: Fusing mobile terrestrial laser scanning and optical bathymetric mapping. Earth Surf. Process. Landf. 2014, 39, 167–183. [Google Scholar] [CrossRef]
- Moretto, J.; Rigon, E.; Mao, L.; Delai, F.; Picco, L.; Lenzi, M. Short-term geomorphic analysis in a disturbed fluvial environment by fusion of LiDAR, colour bathymetry and dGPS surveys. Catena 2014, 122, 180–195. [Google Scholar] [CrossRef] [Green Version]
- Delai, F.; Moretto, J.; Picco, L.; Rigon, E.; Ravazzolo, D.; Lenzi, M. Analysis of morphological processes in a disturbed gravel-bed river (Piave River): Integration of LiDAR data and colour bathymetry. J. Civil Eng. Archit. 2014, 8, 639–648. [Google Scholar]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Mandlburger, G.; Hauer, C.; Wieser, M.; Pfeifer, N. Topo-Bathymetric LiDAR for Monitoring River Morphodynamics and Instream Habitats—A Case Study at the Pielach River. Remote Sens. 2015, 7, 6160–6195. [Google Scholar] [CrossRef] [Green Version]
- Aggett, G.R.; Wilson, J.P. Creating and Computing a High-Resolution DTM with a 1-D Hydraulic Model in GIS for Scenario-Based Assessment of Avulsion Hazard in Grave-Bed River. Geomorphology 2009, 113, 21–34. [Google Scholar] [CrossRef]
- Frankel, K.L.; Dolan, J.F. Characterizing Arid Region Alluvial Fan Surface Roughness with Airborne Laser Swath Mapping Digital Topographic Data. J. Geophys. Res. 2007, 112, F02025. [Google Scholar] [CrossRef] [Green Version]
- Jones, A.; Brewer, P.A.; Johnstone, E.; Macklin, M.G. High-resolution interpretative geomorphological mapping of river valley environments using airborne LiDAR data. Earth Surf. Process. Landf. 2007, 32, 1574–1592. [Google Scholar] [CrossRef]
- Cavalli, M.; Tarolli, P.; Marchi, L.; Fontana, G.D. The effectiveness of airborne LiDAR data in the recognition of channel-bed morphology. Catena 2008, 73, 249–260. [Google Scholar] [CrossRef]
- Wu, W.; Rodi, W.; Wenka, T. 3D numerical modeling of flow and sediment transport in open channels. J. Hydraul. Eng. 2000, 126, 4–15. [Google Scholar] [CrossRef]
- Gueudet, P.; Wells, G.; Maidment, D.R.; Neuenschwander, A. Influence of the postspacing density of the LiDAR-derived DEM on flood modeling. In Proceedings of the Geographic Information Systems and Water Resources III—AWRA Spring Specialty Conference, Nashville, TN, USA, 17–19 May 2004. [Google Scholar]
- Omer, C.R.; Nelson, J.; Zundel, A.K. Impact of varied data resolution on hydraulic modeling and flood-plain delineation. J. Am. Water Resour. Assoc. 2003, 39, 467–475. [Google Scholar] [CrossRef]
- Bates, P.D.; Marks, K.J.; Horritt, M.S. Optimal use of high resolution topographic data in flood inundation models. Hydrol. Process. 2003, 17, 537–557. [Google Scholar] [CrossRef]
- Marks, K.; Bates, P. Integration of high-resolution topographic data with floodplain flow models. Hydrol. Process. 2000, 14, 2109–2122. [Google Scholar] [CrossRef]
- Ali, H.L.; Yusuf, B.; Mohammed, T.A.; Shimizu, Y.; Ab Razak, M.S.; Rehan, B.M. Enhancing the Flow Characteristics in a Branching Channel Based on a Two-Dimensional Depth-Averaged Flow Model. Water 2019, 11, 1863. [Google Scholar] [CrossRef]
- Hasenhündl, M.; Blanckaert, K. A Matlab script for the morphometric analysis of subaerial, subaquatic and extra-terrestrial rivers, channels and canyons. Comput. Geosci. 2022, 162, 105080. [Google Scholar] [CrossRef]
- Hodgson, E.; Bresnahan, P. Accuracy of airborne LiDAR-derived elevation: Empirical assessment and errorbudget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Hyyppa, H.; Yu, X.; Hyyppa, J.; Kaartinen, H.; Honkavaara, E.; Ronnholm, P. Factors affecting the qualityof DTM generation in forested areas. In Proceedings of the ISPRS Workshop Laser Scanning, Enschede, The Netherlands, 12–14 September 2005. [Google Scholar]
- Coveney, S.; Monteys, X. Integration Potential of INFOMAR Airborne LiDAR Bathymetry with External Onshore LiDAR Data Sets. J. Coast. Res. 2011, 10062, 19–29. [Google Scholar] [CrossRef]
- Culver, M.; Schubel, J.; Davidson, M.; Haines, J. Building a sustainable community of coastal leaders to deal with sea level rise and inundation. Shifting Shorelines: Adapting to the Future. In Proceedings of the 22nd International Conference of the Coastal Society, Wilmington, NC, USA, 13–16 June 2010. [Google Scholar]
- Lin, N.; Emanuel, K.; Oppenheimer, M.; Vanmarcke, E. Physically based assessment of hurricane surge threat under climate change. Nat. Clim. Change 2012, 2, 462–467. [Google Scholar] [CrossRef] [Green Version]
- Spalding, M.D.; Ruffo, S.; Lacambra, C.; Meliane, I.; Hale, L.Z.; Shepard, C.C.; Beck, M.W. The role of ecosystems in coastal protection: Adapting to climate change and coastal hazards. Ocean. Coast. Manag. 2014, 90, 50–57. [Google Scholar] [CrossRef]
- Kendall, M.S.; Buja, K.; Menza, C.; Battista, T. Where, what, when, and why is bottom mapping needed? An on-line application to set priorities using Expert Opinion. Geosciences 2018, 8, 379. [Google Scholar] [CrossRef] [Green Version]
- Robertson, Q.; Dunkin, L.; Dong, Z.; Wozencraft, J.; Zhang, K. Florida and US East Coast Beach Change Metrics Derived from LiDAR Data Utilizing ArcGIS Python Based Tools. In Beach Management Tools-Concepts, Methodologies and Case Studies; Botero, C., Cervantes, O., Finkl, C., Eds.; Coastal Research Library; Springer: Cham, Switzerland, 2018; Volume 24. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne Laser Scanning—An Introduction and Overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- llouis, T.; Bailly, J.S.; Pastol, Y.; le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Process. Landf. 2010, 35, 640–650. [Google Scholar]
- Yang, A.; Wu, Z.; Yang, F.; Su, D.; Ma, Y.; Zhao, D.; Qi, C. Filtering of airborne LiDAR bathymetry based on bidirectional cloth simulation. ISPRS J. Photogramm. Remote Sens. 2020, 163, 49–61. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sens. 2017, 9, 710. [Google Scholar] [CrossRef]
- Pe’eri, S.; Philpot, W. Increasing the Existence of Very Shallow-Water LiDAR Measurements Using the Red-Channel Waveforms. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1217–1223. [Google Scholar] [CrossRef]
- Guo, K.; Li, Q.; Wang, C.; Mao, Q.; Liu, Y.; Zhu, J.; Wu, A. Development of a single-wavelength airborne bathymetric LiDAR: System design and data processing. ISPRS J. Photogramm. Remote Sens. 2022, 185, 62–84. [Google Scholar] [CrossRef]
- Beck, I.J.; Losada, P.; Menéndez, B.G.; Reguero, P.; Díaz-Simal, F. Fernández The global flood protection savings provided by coral reefs. Nat. Commun. 2018, 9, 2186. [Google Scholar] [CrossRef] [Green Version]
- Turmel, D.; Parker, G.; Locat, J. Evolution of an anthropic source-to-sink system: Wabush Lake. Earth-Sci. Rev. 2015, 151, 227–243. [Google Scholar] [CrossRef]
- Hui, G.; Li, S.; Guo, L.; Wang, P.; Liu, B.; Wang, G.; Li, X.; Somerville, I. A review of geohazards on the northern continental margin of the South China Sea. Earth-Sci. Rev. 2020, 220, 103733. [Google Scholar] [CrossRef]
- Cottin, A.G.; Forbes, D.L.; Long, B.F. Shallow seabed mapping and classification using waveform analysis and bathymetry from SHOALS LiDAR data. Can. J. Remote Sens. 2014, 35, 422–434. [Google Scholar] [CrossRef]
- Xhardé, R.; Long, B.F.; Forbes, D.L. Short-Term Beach and Shoreface Evolution on a Cuspate Foreland Observed with Airborne Topographic and Bathymetric LiDAR. J. Coast. Res. 2011, 62, 50–61. [Google Scholar] [CrossRef] [PubMed]
- Wozencraft, J.; Millar, D. Airborne LiDAR and Integrated Technologies for Coastal Mapping and Nautical Charting. Mar. Technol. Soc. J. 2005, 39, 27–35. [Google Scholar] [CrossRef]
- Andersen, M.S.; Gergely, Á.; Al-Hamdani, Z.; Steinbacher, F.; Larsen, L.R.; Ernstsen, V.B. Processing and performance of topobathymetric LiDAR data for geomorphometric and morphological classification in a high-energy tidal environment. Hydrol. Earth Syst. Sci. 2017, 21, 43–63. [Google Scholar] [CrossRef] [Green Version]
- Close, M.; Doneus, I.; Miholjek, G.; Mandlburger, N.; Doneus, G.; Verhoeven, C.; Briese, M. Pregesbauer Airborne Laser Bathymetry for Documentation of Submerged Archaeological Sites in Shallow Water. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 99–107. [Google Scholar] [CrossRef]
- Long, B.; Aucoin, F.; Montreuil, S.; Robitaille, V.; Xhardé, R. Airborne LiDAR Bathymetry Applied to Coastal Hydrodynamic Processes. Coast. Eng. Proc. 2011, 1, 26. [Google Scholar] [CrossRef] [Green Version]
- Diesing, M.; Mitchell, P.; Stephens, D. Image-based seabed classification: What can we learn from terrestrial remote sensing? ICES J. Mar. Sci. 2016, 73, 2425–2441. [Google Scholar] [CrossRef]
- Fogarin, S.; Madricardo, F.; Zaggia, L.; Sigovini, M.; Montereale-Gavazzi, G.; Kruss, A.; Lorenzetti, G.; Manfé, G.; Petrizzo, A.; Molinaroli, E.; et al. Tidal inlets in the Anthropocene: Geomorphology and benthic habitats of the Chioggia inlet, Venice Lagoon (Italy). Earth Surf. Process. Landf. 2019, 44, 2297–2315. [Google Scholar] [CrossRef]
- Brown, C.J.; Todd, B.J.; Kostylev, V.E.; Pickrill, R.A. Image-based classification of multibeam sonar backscatter data for objective surficial sediment mapping of Georges Bank, Canada. Cont. Shelf Res. 2011, 31, S110–S119. [Google Scholar] [CrossRef]
- Lucieer, V.; Lucieer, A. Fuzzy clustering for seafloor classification. Mar. Geol. 2009, 264, 230–241. [Google Scholar] [CrossRef]
- Li, G.; Zhou, Q.; Xu, G.; Wang, X.; Han, W.; Wang, J.; Zhang, G.; Zhang, Y.; Yuan, Z.; Song, S.; et al. LiDAR-radar for underwater target detection using a modulated sub-nanosecond Q-switched laser. Opt. Laser Technol. 2021, 142, 107234. [Google Scholar] [CrossRef]
- Chen, X.; Kong, W.; Chen, T.; Liu, H.; Huang, G.; Shu, R. High-repetition-rate, sub-nanosecond and narrow-bandwidth fiber-laser-pumped green laser for photon-counting shallow-water bathymetric LiDAR. Results Phys. 2020, 19, 103563. [Google Scholar] [CrossRef]
- Hu, M.; Mao, J.; Li, J.; Wang, Q.; Zhang, Y. A Novel Lidar Signal Denoising Method Based on Convolutional Autoencoding Deep Learning Neural Network. Atmosphere 2021, 12, 1403. [Google Scholar] [CrossRef]
- Kogut, T.; Weistock, M. Classifying airborne bathymetry data using the Random Forest algorithm. Remote Sens. Lett. 2019, 10, 874–882. [Google Scholar] [CrossRef]
- Kogut, T.; Slowik, A. Classification of Airborne Laser Bathymetry Data Using Artificial Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1959–1966. [Google Scholar] [CrossRef]
- Hansen, S.S.; Ernstsen, V.B.; Andersen, M.S.; Al-Hamdani, Z.; Baran, R.; Niederwieser, M.; Steinbacher, F.; Kroon, A. Classification of Boulders in Coastal Environments Using Random Forest Machine Learning on Topo-Bathymetric LiDAR Data. Remote Sens. 2021, 13, 4101. [Google Scholar] [CrossRef]
- Letard, M.; Collin, A.; Corpetti, T.; Lague, D.; Pastol, Y.; Ekelund, A. Classification of Land-Water Continuum Habitats Using Exclusively Airborne Topobathymetric Lidar Green Waveforms and Infrared Intensity Point Clouds. Remote Sens. 2022, 14, 341. [Google Scholar] [CrossRef]
- Wang, A.; He, X.; Ghamisi, P.; Chen, Y. LiDAR Data Classification Using Morphological Profiles and Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 774–778. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30, 1–14. [Google Scholar]
- Shanjiang, H.; Yan, H.; Bangyi, T.; Jiayong, Y.; Weibiao, C. Classification of sea and land waveforms based on deep learning for airborne laser bathymetry. Infrared Laser Eng. 2019, 48, 1113004. [Google Scholar] [CrossRef]
- Liu, W.; Sun, J.; Li, W.; Hu, T.; Wang, P. Deep Learning on Point Clouds and Its Application: A Survey. Sensors 2019, 19, 4188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Diab, A.; Kashef, R.; Shaker, A. Deep Learning for LiDAR Point Cloud Classification in Remote Sensing. Sensors 2022, 22, 7868. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SBES-Single Beam Echo Sounder | MBES-Multi Beam Echo Sounder | Green Laser Bathymetry | |
|---|---|---|---|
| System location | boat | boat | boat, plane, drone |
| Working area | Navigable water area | Nawigable water area | Shallow water area (up to 3 i Secchi depth) |
| Measurement coverage | Only a profile along a boat’s route | 100% | 100% |
| Type of wave | Sound wave | Sound wave | Green wavelength of 532 nm |
| System components | Echo sounder, positioning system (GPS-RTK) | Multi-beam head integrated with a motion sensor and a sensor for measuring near-surface speed of sound in water, positioning system (GPS-RTK) | GPS receiver, inertial measurement unit, laser scanner, signal receiving sensor |
| Frequency | Two frequencies at once e.g., 38 kHz/200 kHz | Between 100 and 700 kHz | 1.5 kHz to 512 kHz |
| Characteristics of the measurement results | Low data density, small measurement errors | Huge data density, all disturbance and noise that need to be eliminated during data processing are recorded | Huge data density, the frequency of their acquisition and the speed of acquisition |
| Measurement result | echogram | Point cloud | Point cloud |
| Parameter | Topographic Scanner | Bathymetric Scanner |
|---|---|---|
| laser wavelength | 1064 nm (IR) | 532 nm (green) |
| sent pulse beam divergence | narrow (0.3 mrd) | narrow (0.3 mrd) |
| return pulse beam divergence | narrow (0.3 m from a height of 1000 m) | wide (2 m from a height of 300 m) |
| frequency of pulse generating | big (up to 400 kHz) | small (1–10 kHz) |
| pulse width | short (5–10 ns) | short (<5 ns) |
| energy emitted | small (5–10 μJ) | big (5–10 mJ) |
| incidence angle | nadir (0°) | forward (15–20°) |
| laser sensor | single laser | double (2 wavelengths) |
| accuracy of distance measurement | 1–3 cm | 3–5 cm |
| Scan trace | Parallel lines, sinusoidal | Elliptical lines (Palmer scanner) |
| Optical sensors | MS digital camera | HSI/MS digital camera |
| georeference | GNSS/INS | GNSS/INS |
| platform | helicopter plane | airplane, helicopter, drone |
| flight altitude | 500–1000 m (and more) | 300–500 m |
| processing | Discrete reflections, full wave shape | Full wave shape |
| Optech CZMIL Supernova | USGS EAARL-B | Fugro LADS Mk-3 | Riegl VQ-820-G | |
|---|---|---|---|---|
| Typical Sensor Environment | Topo-Bathy | Topo-Bathy | Bathy | Topo-Bathy |
| Laser Wavelengths | Green 532 nm Infra-Red 1064 nm | Green 532 nm | Green 532 nm | Green 532 nm |
| Scan Shape | Circular | Elliptic Arc | Rectilinear | Elliptic Arc |
| Scan direction and Angle from Nadir | Fwd and Aft 20° | Fwd 5° Sideways 22° | Fwd up to 8° | Fwd or Aft 20° |
| Scan Method | Rotating Prisms | Oscilating Raster Scanner | Oscilating Mirror | Rotating Multi-Facet Mirror |
| Lase Energy Per Pulse (Green 532 nm) | 3 mJ | 0.4 mJ 0.13 mJ per beam | 7 mJ | 0.02 mJ |
| Pulse Duration | 2.0–2.2 ns | 0.85 ns | 6.5 ns | 1.2 ns |
| Peak Measurement Frequency | 10 kHz@532 70 kHz@1064 | 15 kHz or 30 kHz | 1.5 kHz@532 | Up to 512 kHz@532 |
| 532 nm Nominal Footpront Diameter Water Surface (1/e2) | 2.4 m | 0.3 m per beamlet 1.6 m apart | 3 m | 0.6 m@AGL Below |
| Nominal Flying Height | 400–800 m AGL | Nominal 300 mAGL | 400–915 m AGL | Nominal 600 m AGL |
| Swath Width (as a function of point spacing or altitude) | 291 m@400 m AGL 582 m@800 m AGL | 230 m@300 m AGL | 585 m@8 × 5 m 360 m@5 × 5 m 125 [email protected] × 2.5 m | 400 m |
| Typical Bathymetric Point Spacings | 2 × 2 m (Deep) 0.7 m × 0.7 m (Shallow) | 1.5 × 1.5 m | 2 × 2 m–8 × 5 m | 0.2 × 0.2 m–0.8 × 0.8 m |
| Maximum depth | ~60 m 2.5–3× Secchi depth | ~27 m 1.5–2.5× Secchi depth | ~80 m 2.5–3× Secchi depth | ~10 m 1× Secchi depth |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szafarczyk, A.; Toś, C. The Use of Green Laser in LiDAR Bathymetry: State of the Art and Recent Advancements. Sensors 2023, 23, 292. https://doi.org/10.3390/s23010292
Szafarczyk A, Toś C. The Use of Green Laser in LiDAR Bathymetry: State of the Art and Recent Advancements. Sensors. 2023; 23(1):292. https://doi.org/10.3390/s23010292
Chicago/Turabian StyleSzafarczyk, Anna, and Cezary Toś. 2023. "The Use of Green Laser in LiDAR Bathymetry: State of the Art and Recent Advancements" Sensors 23, no. 1: 292. https://doi.org/10.3390/s23010292
APA StyleSzafarczyk, A., & Toś, C. (2023). The Use of Green Laser in LiDAR Bathymetry: State of the Art and Recent Advancements. Sensors, 23(1), 292. https://doi.org/10.3390/s23010292