1. Introduction
Intelligent driving trajectory tracking control is the core technology for intelligent vehicle planning and control and provides the basis for intelligent vehicle automatic control [
1]. However, regarding the strong nonlinear and time-varying characteristics in vehicle path tracking systems, the dynamic performance of the control algorithm must be sufficiently high. Accordingly, improvements to the tracking accuracy and robustness of controllers are urgently required.
Commonly used trajectory-tracking control algorithms include proportional–integral–derivative (PID) control [
2], preview control [
3,
4,
5], optimal control [
6,
7,
8], and model predictive control (MPC) [
9,
10,
11,
12]. MPC can consider various safety factors and has thus attracted widespread attention from scholars for the optimal control of linear/nonlinear systems under physical constraints. Yakub et al. [
13] compared the linear quadratic regulator with linear time-varying (LTV) MPC, and LTV-MPC demonstrated a better path tracking effect. Jianwei et al. [
14] elaborated on the application of MPC in autonomous driving. Falcone et al. [
15] proposed an LTV-MPC that can ensure the stability of a vehicle at high speeds through limiting the tire slip angle. Katriniok et al. [
16] expanded upon the work in [
15] and linearized the model within the prediction time, resulting in a high accuracy and control effect for the LTV-MPC. To increase the stability and safety of a vehicle when tracking the reference trajectory, Cao et al. [
17] expanded the constraint conditions of the LTV-MPC to the center-of-mass sideslip angle, lateral acceleration, and tire sideslip angle. The obtained LTV-MPC exhibited strong adaptability. Li et al. [
18] integrated the driver’s driving intention, driving environment assessment, and the MPC algorithm to form a shared fuzzy steering controller that can successfully assist drivers in avoiding obstacles and ensure vehicle stability. Zhong Siqi [
19] proposed an MPC method for path-tracking lateral control (KNMPC) with an approximate tracking error to avoid duplication problems caused by finding the nearest point during operation, thus reducing errors and improving the operation efficiency.
However, none of the aforementioned studies included the impact of model errors on the MPC effect. Guo et al. [
20] considered the model error as the measurement disturbance of the yaw angular velocity and proposed an MPC method based on a differential evolution algorithm that can improve the trajectory tracking accuracy of unmanned vehicles when determining the road adhesion coefficient. MPC requires the discretization and linearization of system dynamics, which leads to a range of modeling errors. Therefore, [
21] designed an adaptive sliding mode controller for use in vehicle formations based on nonholonomic wheeled mobile robots. This controller has the advantage of dealing with the unknown complex behavior of friction, the uncertainty of parameters, and external interference without prior knowledge of parameters and structures. The simulation results show that the performance of this controller represents a significant improvement compared with other existing controllers. Reference [
22] designed a path tracking controller based on robust output feedback that can be applied to a class of self-reconfiguring mobile robots under actuator saturation. The controller can estimate unmeasurable states and uncertain dynamic items, a fast dynamic compensator is used to meet the actuator constraints and limitations, and the closed-loop stability of the system is analyzed based on the contraction theory, which is better than Lyapunov’s. The simulation results show that the controller has better control performance. In addition, Xuanxuan proposed improved MPC based on fuzzy control and classic MPC. In particular, the weight value and cost function can be adjusted according to the lateral position and route errors, thereby improving the tracking accuracy and comfort of the vehicle during the continuous tracking process [
23]. Xudong et al. [
24] focused on the problem of the poor adaptability of MPC systems and proposed an emergency obstacle avoidance strategy based on trajectory replanning and path-tracking dual-layer MPC, fully utilizing the advantages of the algorithm. Zhenyu [
25] designed an obstacle avoidance controller based on a BP neural network and MPC. With the simplified parameter adjustment process and optimization of weight parameters, this method exhibits high tracking accuracy. Shi et al. [
26] built an adaptive MPC (AMPC) system that can operate under the condition of a disturbed path curvature, based on the kinematic model and dynamic driving deviation model of autonomous wheeled loaders. The results show that its tracking effect is significantly improved compared with that of traditional MPC. Wang et al. [
27] designed a highly adaptive and robust MPC method that can respond to uncertain interference to address the slipping problem caused by vehicles driving on rough and unstable roads.
However, owing to the influence of the road adhesion coefficient and vertical load, a complex nonlinear relationship exists between the tire force and slip angle [
28]. Large tire slip angles cause nonlinear tire slip characteristics, resulting in large model errors, as well as poor tracking accuracy and vehicle driving stability [
29], leading to dangerous accidents [
30]. Therefore, current MPC methods cannot satisfy the tracking requirements under complex road conditions based on linear constant tire cornering stiffness. In addition, the predicted time domain in general MPC systems is often considered a fixed value. However, the choice of the predicted time domain significantly impacts the control effect of the system. Differences in the predicted time domains for various driving speeds and road adhesion conditions lead to different control effects. It is thus necessary to examine the impact of different predicted time domains on the control effect under different driving speeds and road adhesion conditions.
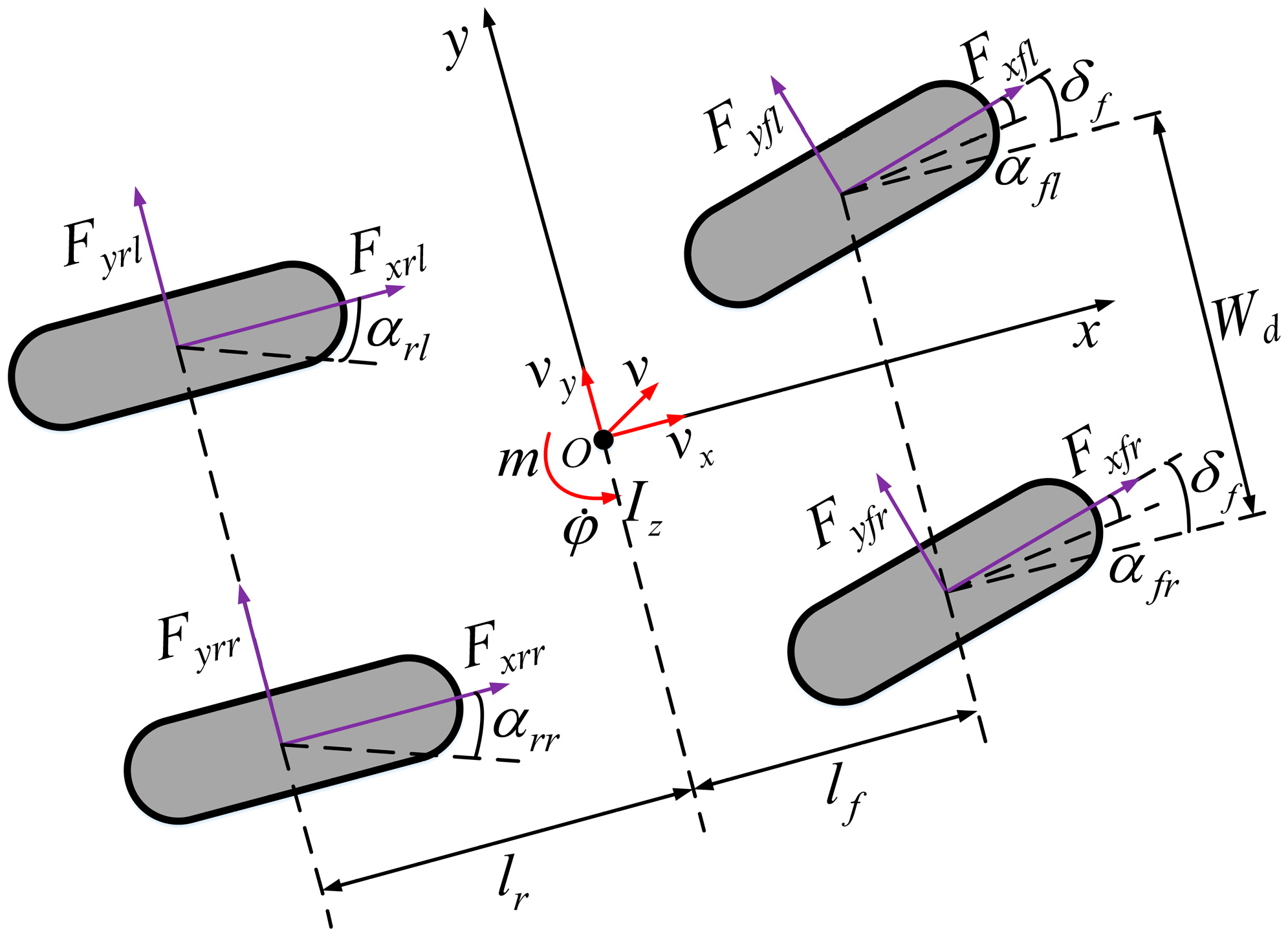
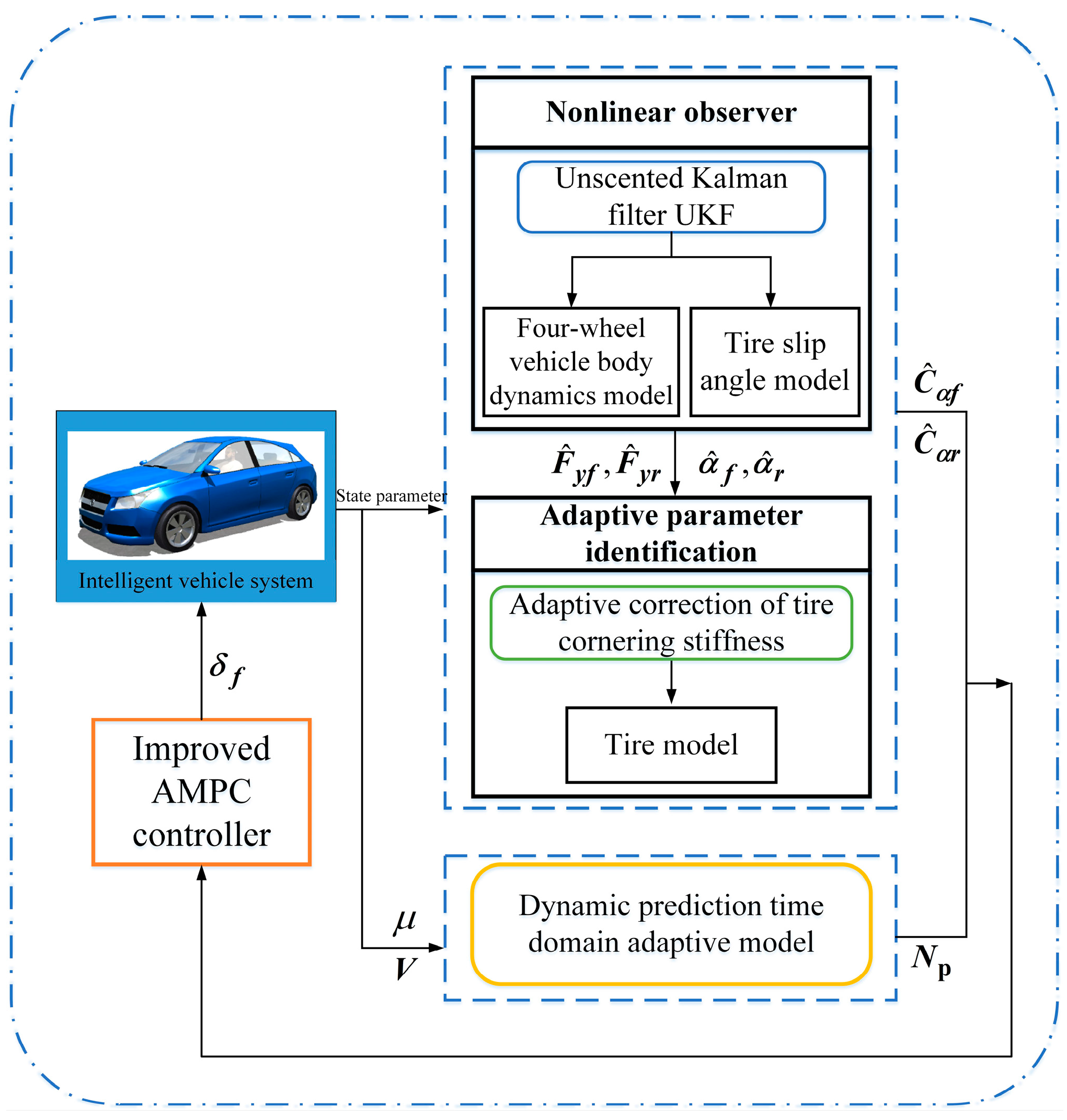
Accordingly, this study proposes an improved AMPC method that considers the tire lateral force calculation deviation and dynamically predicts a time-domain adaptive model for different driving states and road adhesion conditions of a vehicle. First, the unscented Kalman filter (UKF) algorithm is employed based on a simplified four-wheel vehicle body dynamics model and variables such as longitudinal vehicle speed, yaw angular velocity, and lateral acceleration are considered as the observed quantities of the measurement equation to accurately estimate the lateral forces of the front and rear tires in real time. Based on this, an adaptive correction estimation strategy for tire cornering stiffness is designed. The front- and rear-tire lateral forces ( and , respectively), accurately estimated in real time using the UKF, and the corresponding linear tire lateral forces ( and ), based on the linear constant tire cornering stiffness, are used to perform comparisons and other operations. The front- and rear-tire cornering stiffness correction factors are then defined, and the AMPC is established. A dynamic prediction time-domain adaptive model is designed based on vehicle speed and road adhesion conditions to further improve the proposed AMPC, and an improved AMPC method for trajectory tracking is realized. Finally, the control effectiveness and trajectory tracking accuracy of the proposed improved AMPC method are verified through a joint simulation using CarSim 2019 and MATLAB/Simulink 2021b software.
The rest of this paper is organized as follows:
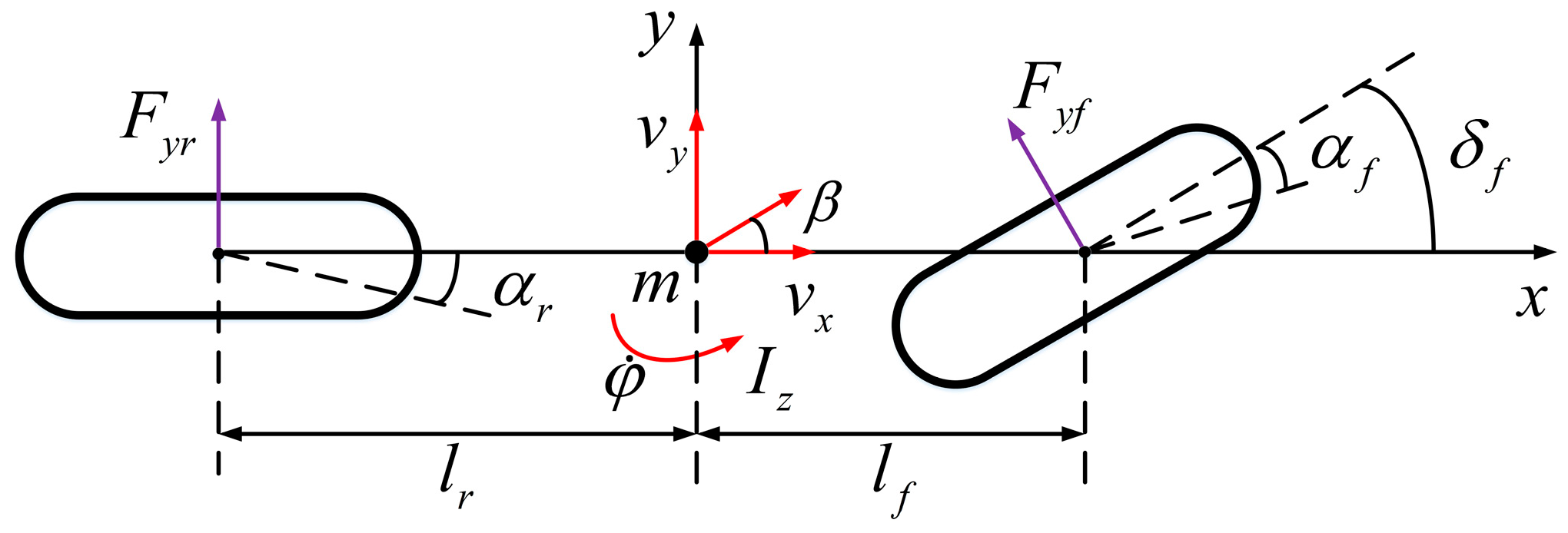
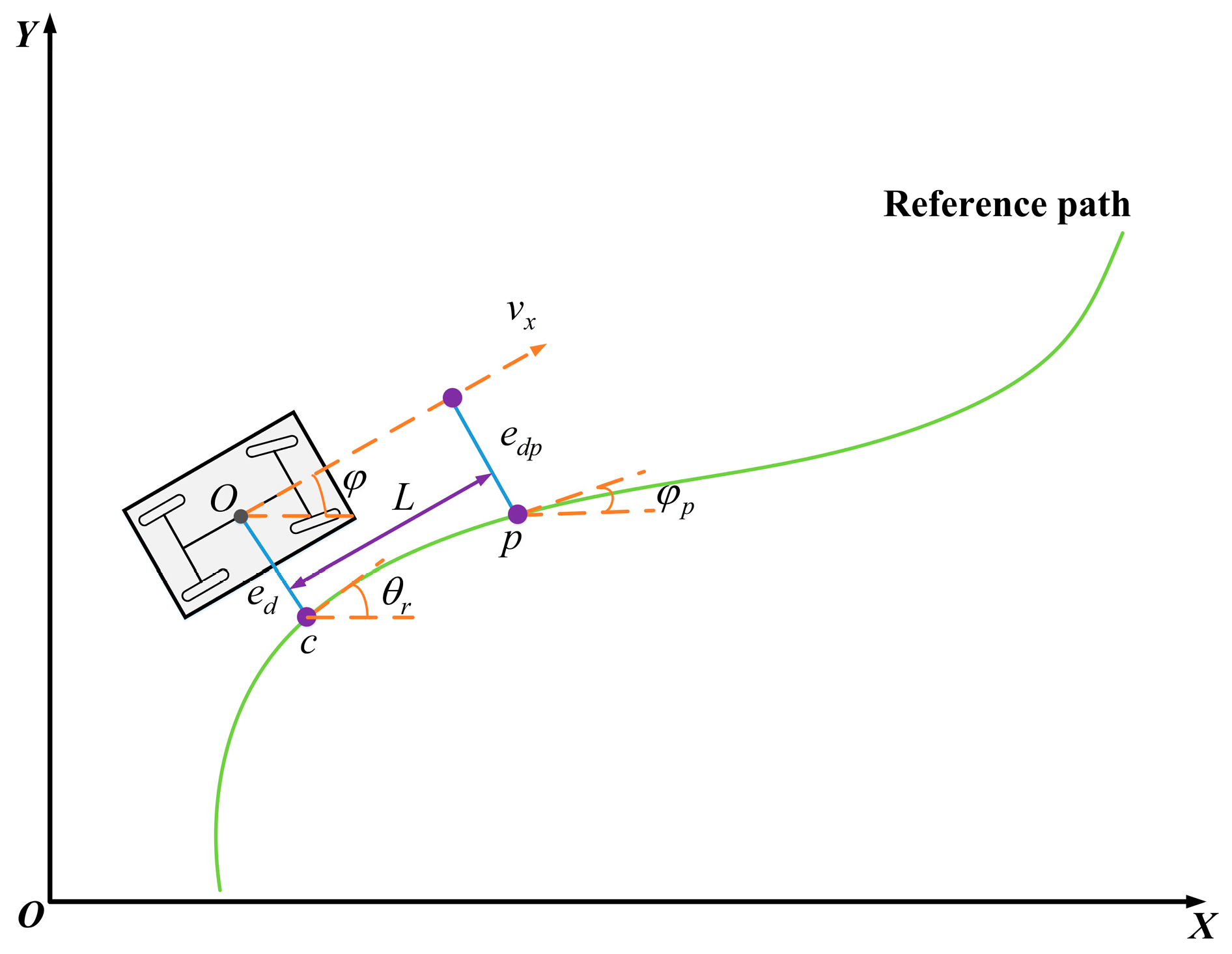
Section 2 introduces the vehicle–road error dynamics model, including the four-wheel vehicle body dynamics model and the two-wheel autonomous vehicle dynamics model.
Section 3 presents estimations of the tire lateral force and tire cornering stiffness based on the established dynamics model described in
Section 2 and outlines the verification of the simulation results. In
Section 4, the design of the improved AMPC method for trajectory tracking is detailed.
Section 5 provides the simulation test results and verification of the proposed tracking controller. Finally, the study is summarized in
Section 6.
5. Simulation Test and Verification
With the CarSim and MATLAB/Simulink joint simulation platform, the improved AMPC proposed herein, which combines the adaptive correction estimation for tire cornering stiffness and the dynamic prediction time-domain adaptive model, was simulated and verified.
For most normal working conditions or complex and severe working conditions, such as low-adhesion single-lane-shift working conditions (slightly higher vehicle speed) or low-adhesion double-lane-shift working conditions, some studies in the relevant literature (such as references [
37,
38,
39,
40,
41]) have shown that path tracking controllers based on MPC have better path-tracking control effects than the LQR controller and the pure tracking controller. Therefore, this article will no longer jointly compare the tracking control performance of the LQR path tracking controller and the pure tracking controller with that of the ordinary MPC controller and the improved AMPC controller proposed in this article. Only the improved AMPC controller mentioned in this article and the ordinary MPC controller will be simulated, compared, and analyzed to conduct a simulation comparison and verification of the proposed controller.
Generally speaking, the lateral acceleration of ordinary passenger cars under normal driving conditions is usually between 0.8 g and 1.2 g (1 g is 9.8 m/s
2); under ideal circumstances, a vehicle will begin to slide when the lateral acceleration reaches the acceleration provided by the maximum static friction between the tire and the road. This critical lateral acceleration can be estimated by the following formula:
where
is the critical lateral acceleration of the car when it slips,
is the road adhesion coefficient, and
is the gravity acceleration, which is 9.8 m/s
2.
The results of Bosch’s research on vehicle stability show [
42,
43] that on roads with good adhesion, such as dry asphalt pavement, the center-of-mass sideslip angle limit for a vehicle to drive stably can reach
; while on roads with low adhesion, such as icy and snowy roads, the limit value is approximately
.
In summary, when conducting simulation experiments in this article, when the vehicle under the control of the controller was tracking the path, the vehicle center-of-mass sideslip angle () and the vehicle lateral acceleration () were used to initially judge the driving stability of the vehicle when tracking. In addition, since the focus of this study is vehicle path tracking control under improved AMPC control, the verification of the simulation results mainly focused on the tracking accuracy of path tracking and at the same time ensured the stability of tracking driving. Therefore, we only made a superficial preliminary judgment on vehicle driving stability based on and and did not conduct more in-depth research and analysis on vehicle stability.
5.1. Medium–High Speed and Low-Adhesion Single-Lane-Shift Working Conditions
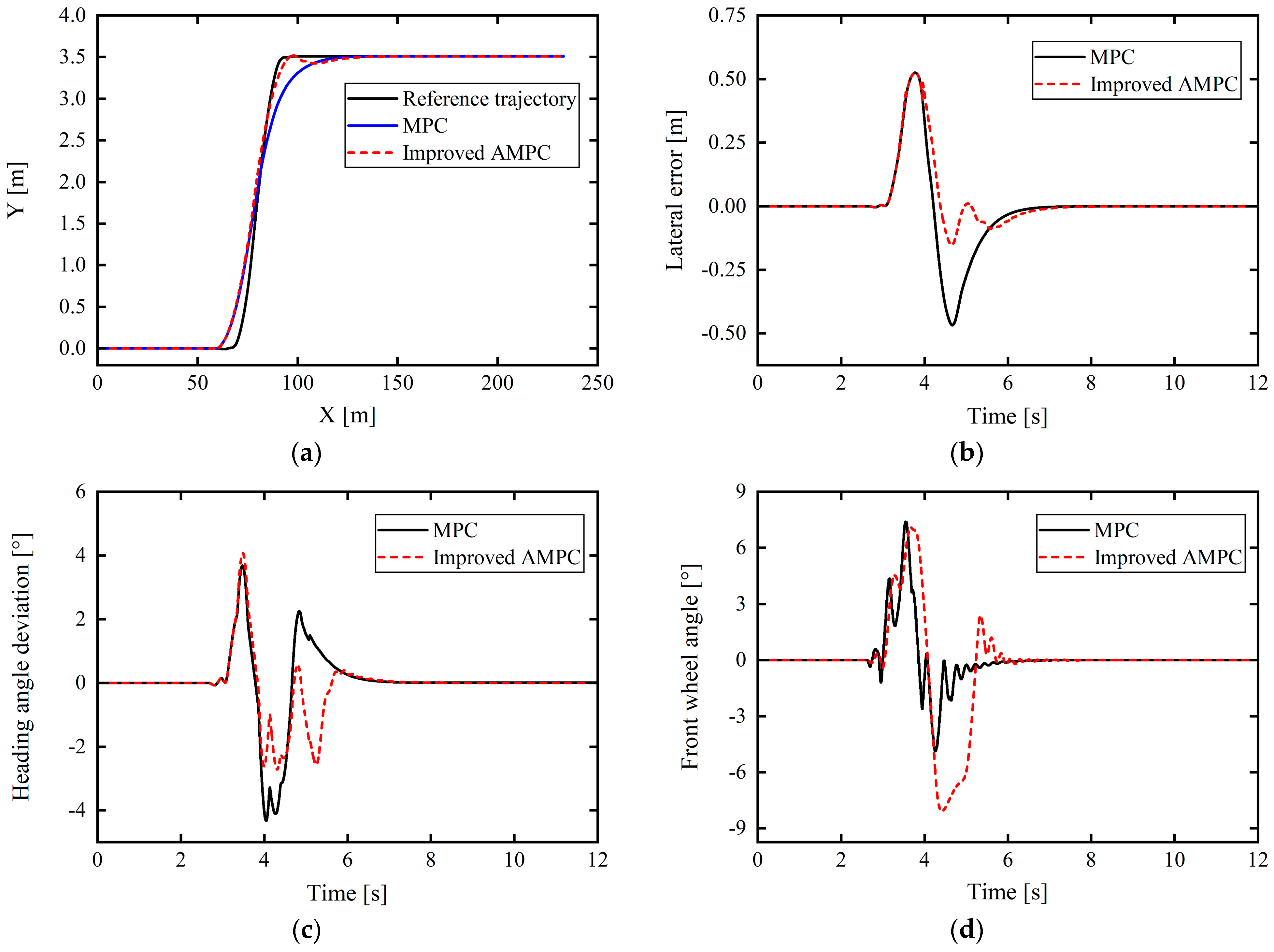
First, the control performance of the improved AMPC was verified based on a typical single-lane-shift condition, with the vehicle speed set to 70 km/h and a roadway adhesion coefficient of 0.4. As shown in
Figure 12, the path-tracking control effect based on the improved AMPC is better than that of the traditional MPC, and the tracking accuracy is significantly improved. Compared with the ordinary MPC, the proposed improved AMPC achieves a maximum reduction in the path-tracking lateral position error of 0.3152 m (time of 4.652 s), and the heading angle error is significantly reduced in the time range of 3.967–4.588 s. At approximately 4.146 s, the error decreased by 2.3902°. It is apparent from
Figure 12e that the front-tire sideslip angle (
) began to exceed 4° at 3.436 s and even reached a maximum of approximately 7.4°. At this time, the tire was already operating in a nonlinear zone. There is a big difference between the tire lateral force calculated based on the linear cornering stiffness (
) and the real value, so it is difficult for the controller to solve the optimal front-wheel angle control quantity. Through the adaptive correction estimation of the tire cornering stiffness with the improved AMPC, the calculated tire force can be as close to the real value as possible, and the vehicle can be controlled to better track the reference path. As shown in
Figure 12d, the front wheel angle changes more gently based on the improved AMPC than with the ordinary MPC, and the jitter is reduced; hence, the driving is more stable and comfortable when following the path.
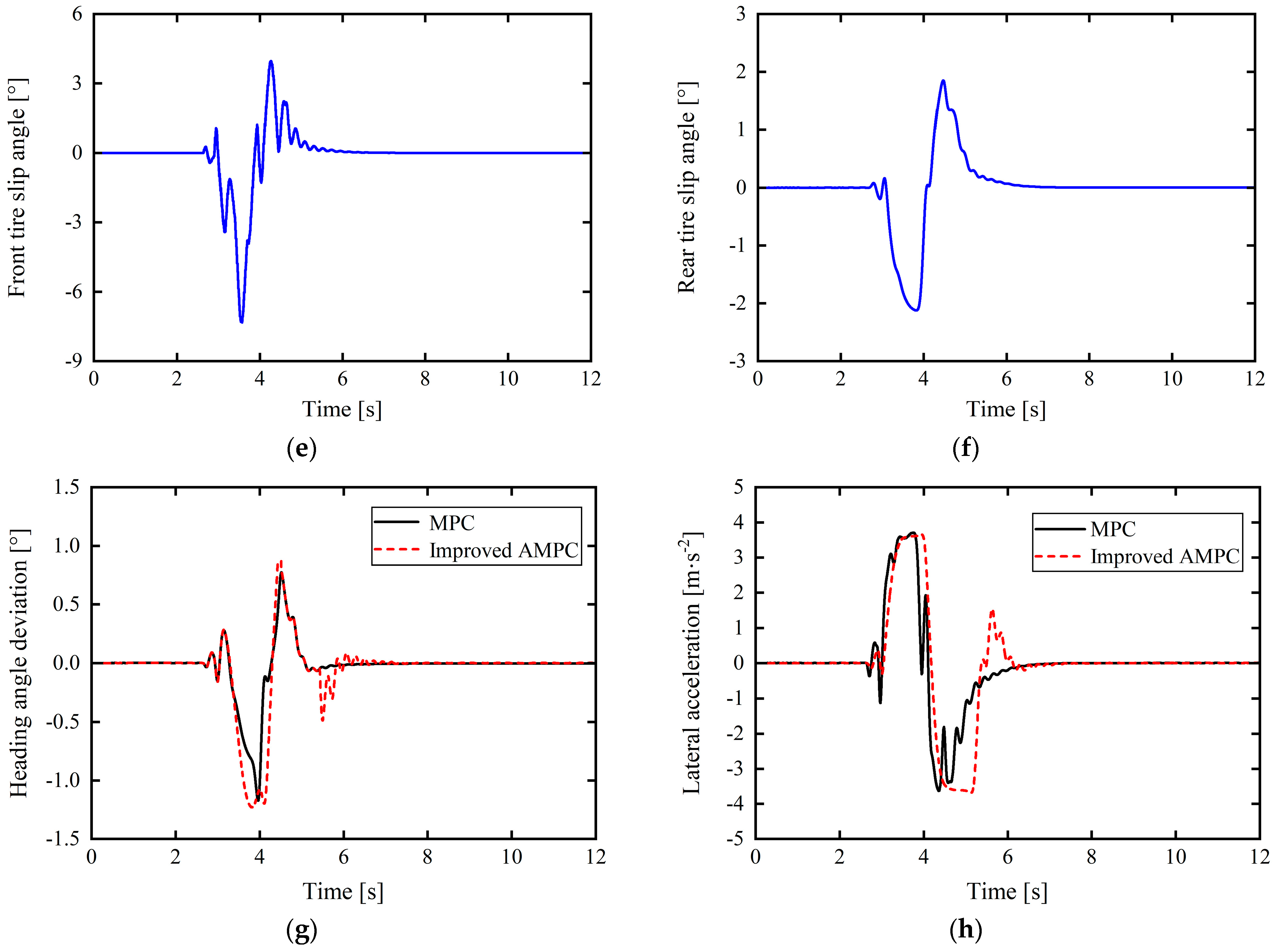
In
Figure 12g, it can be seen from the above that on low-adhesion road surfaces, the upper and lower limits of the vehicle’s center-of-mass slip angle for stable driving are
and that the vehicle’s center-of-mass slip angles under MPC control and improved AMPC control are generally consistent; the maximum value is about 1.3°, which does not exceed the limit of the center-of-mass sideslip angle. The center-of-mass sideslip angle based on the improved AMPC control is slightly larger than that under MPC control at certain times. This is mainly due to the fact that the front wheel angle under the improved AMPC control is slightly larger than that under MPC control in
Figure 12d. In
Figure 12h, it can be seen from the above that since the road adhesion coefficient in this working condition is 0.4, the critical lateral acceleration of the vehicle to slide is 0.4 g. It can be seen that the lateral acceleration of the vehicle under the control of the two controllers does not exceed the acceleration limit, but the lateral acceleration based on the improved AMPC control is slightly increased compared to the MPC control. The main reason is the same as that for the change in the center-of-mass sideslip angle in
Figure 12g, namely, that the front wheel angle under the improved AMPC control is slightly larger than that under the MPC control in
Figure 12d. Overall, although the improved AMPC control does not significantly reduce the vehicle center-of-mass sideslip angle and lateral acceleration compared to the MPC control, the maximum values are maintained within a stable range, and the vehicle will not suffer from unstable situations such as sideslip, indicating that under this severe working condition, the improved AMPC controller proposed in this article not only improves the path tracking accuracy, but also ensures the driving stability of the vehicle.
According to the comparative analysis, the proposed improved AMPC has higher control performance than the traditional MPC in the single-lane-shift condition of low adhesion and medium–high speed.
5.2. Medium–High Speed and Low-Adhesion Double-Lane-Shift Working Conditions
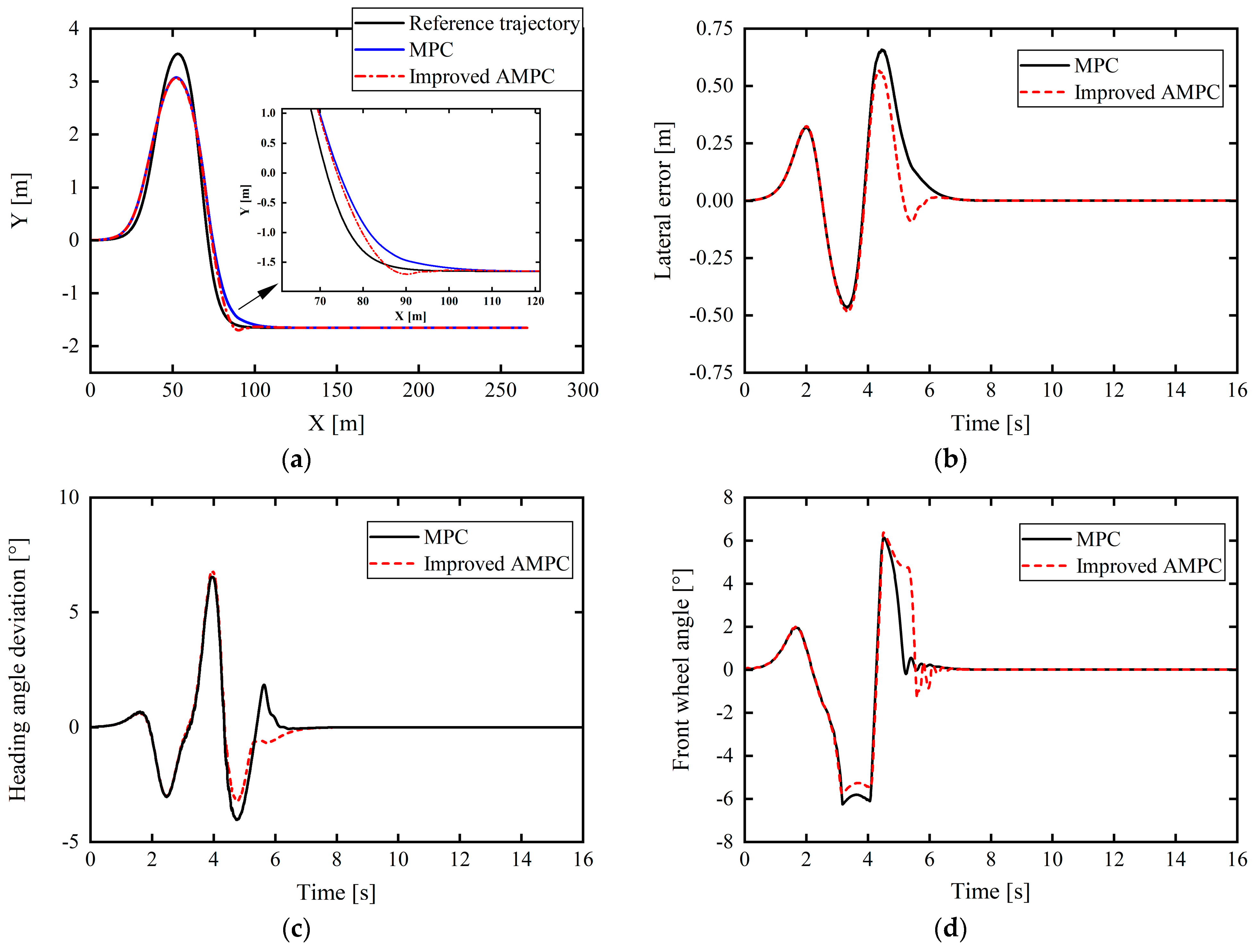
Based on the typical double-lane-shift condition, to verify the control performance of the improved AMPC and its adaptability to the vehicle driving state, the vehicle speed was set to 60 km/h and the road adhesion coefficient was 0.4.
From
Figure 13a–c, it is apparent that the path tracking control based on the improved AMPC controller is better than that based on the ordinary MPC controller and that the tracking accuracy is greatly improved. The maximum lateral position error under the traditional MPC was 0.6574 m. Meanwhile, the proposed improved AMPC has a maximum lateral position error for path tracking of 0.5623 m, a reduction of 14.47%. Further, the maximum values of the heading angle deviation under the control of the improved AMPC and the ordinary MPC are the same, but in the time range of 4.412–5.314 s, the heading angle deviation of the improved AMPC is significantly lower than that of the ordinary MPC, and the maximum decrease is 0.8378°. At 5.604 s, compared with the ordinary MPC controller, the heading angle deviation was reduced by a maximum of 1.0947°.
In addition, as shown in
Figure 13d, based on the improved AMPC compared with the ordinary MPC, the front wheel angle reduces at approximately 3–4 s, and from 4.6 s onwards, the front wheel angle also decreases more gently, although there is a slight amplitude value oscillation when finally approaching the value of 0, but, in general, this does not affect the control performance, and the front wheel angle is clearly improved. In
Figure 13e, the overall difference in the center-of-mass sideslip angle based on the improved AMPC compared with that of the normal MPC is not significant, but the center-of-mass sideslip angle slightly decreased at approximately 5.218 s.
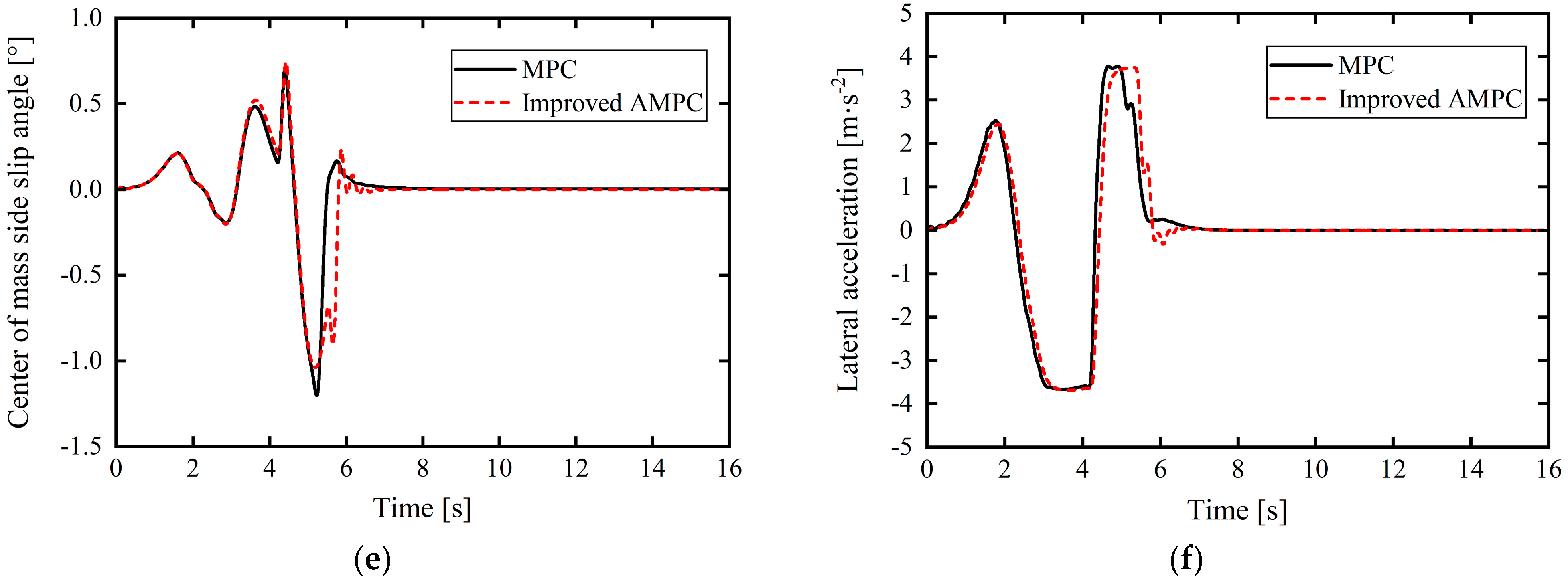
In
Figure 13e, since this working condition is a low-adhesion road condition with an adhesion coefficient of 0.4, it can be seen from the above that the upper and lower limits of the center-of-mass sideslip angle of the vehicle for stable driving are
. The vehicle center-of-mass sideslip angles under MPC control and improved AMPC control are generally consistent, and the maximum center-of-mass sideslip angle under improved AMPC control is about 1°, which is lower than the upper limit. In
Figure 13f, the lateral acceleration of the vehicle under improved AMPC control and MPC control is also roughly the same, and the maximum value does not exceed the critical acceleration of 0.4 g for vehicle sideslip. Comprehensive analysis of
Figure 13e,f shows that under this severe working condition, the vehicle will not suffer dangerous situations such as sideslip under the action of the proposed controller, which ensures the stability of the vehicle while driving to a certain extent. To sum up, the proposed improved AMPC controller not only improves the path tracking accuracy, but also ensures the driving stability of the vehicle.
5.3. High-Speed and High-Adhesion Double-Lane-Shift Working Conditions
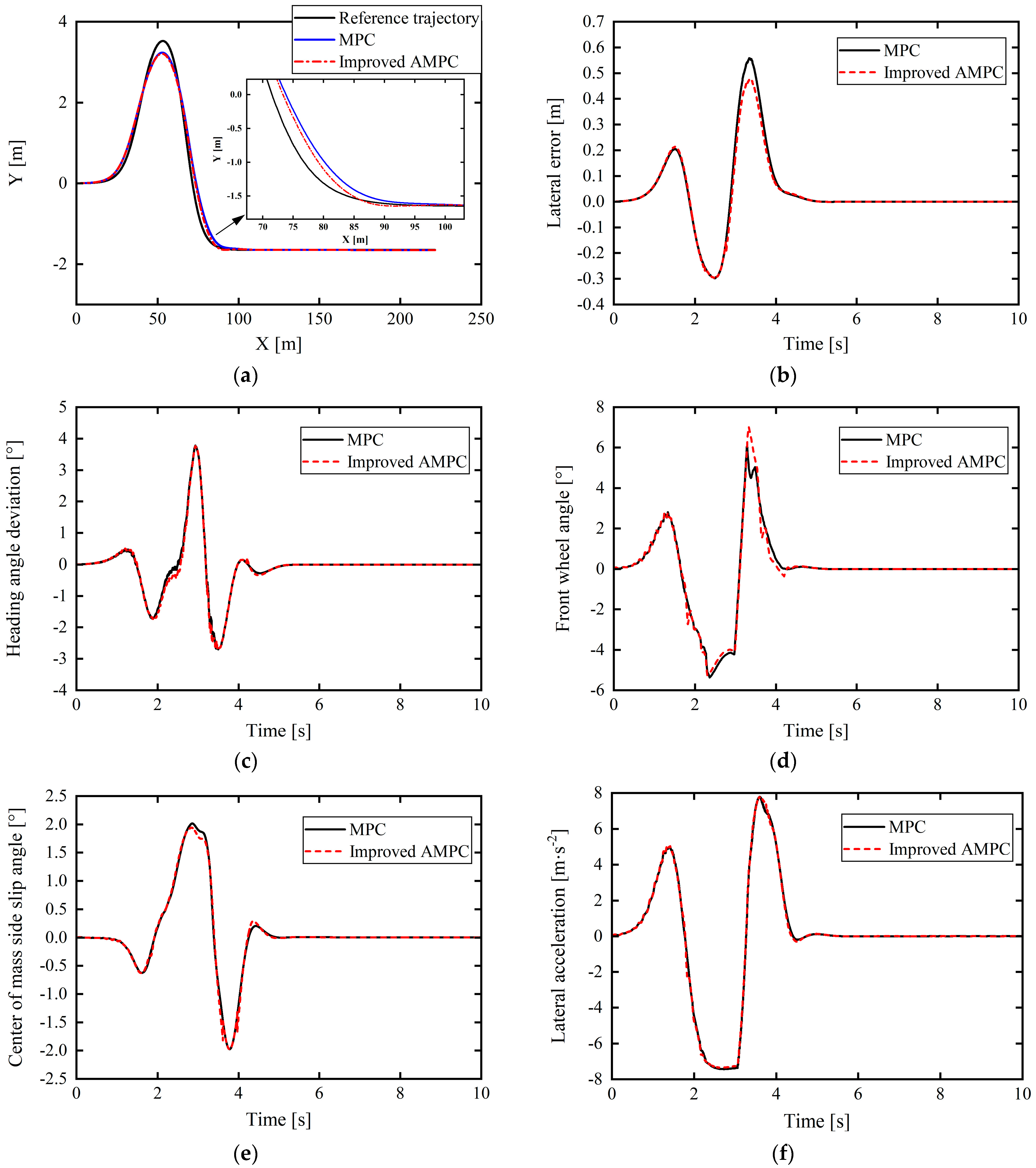
To further verify the adaptability of the proposed improved AMPC to road adhesion conditions and control performance, tests considering the double-lane-shift condition were continued, with the vehicle speed set to 80 km/h and a road adhesion coefficient of 0.9. A comparison of the simulation results is presented in
Figure 14.
From
Figure 14a–c, the path tracking control based on the improved AMPC again appears better than that of the ordinary MPC, leading to improved tracking accuracy and control performance. For specific analysis, the maximum lateral position error under normal MPC is 0.5578 m, while that under the improved AMPC is 0.4746 m, a reduction of 14.92%. Compared with the traditional MPC, the heading angle deviation under the improved AMPC also partially reduces at 2.203–2.635 s. The overall control effect of the front wheel angle is similar. Further considering this beside
Figure 14e, the vehicle center-of-mass sideslip angle is also partially reduced, and the changing range of the respective value also reflects that the vehicle is in a normal working condition.
In
Figure 14e, since the working condition is a high-adhesion road condition with an adhesion coefficient of 0.9, it can be seen from the above that the upper and lower limits of the center-of-mass sideslip angle of the vehicle that can drive stably are
and that the maximum sideslip angle of the vehicle’s center of mass controlled by the improved AMPC is 2°, which is far lower than the upper limit. In
Figure 14f, the lateral acceleration of the vehicle based on the improved AMPC control is roughly the same as that under MPC control, and the maximum value is about 8°, which is lower than the critical lateral acceleration of 0.9 g (8.82 m/s
2) when the vehicle sideslips. Similarly, the comprehensive analysis of
Figure 14e,f shows that under this working condition, the vehicle will not suffer dangerous situations such as sideslip under the action of the proposed controller, which ensures the stability of the vehicle while driving to a certain extent.
It can be concluded from this working condition and the simulation results presented in
Section 5.2 that, based on the adaptive correction estimation of the tire cornering stiffness in the improved AMPC, the adaptability of the MPC to road adhesion conditions can be improved while guaranteeing vehicle path tracking accuracy and stability.
5.4. Docking Road Conditions
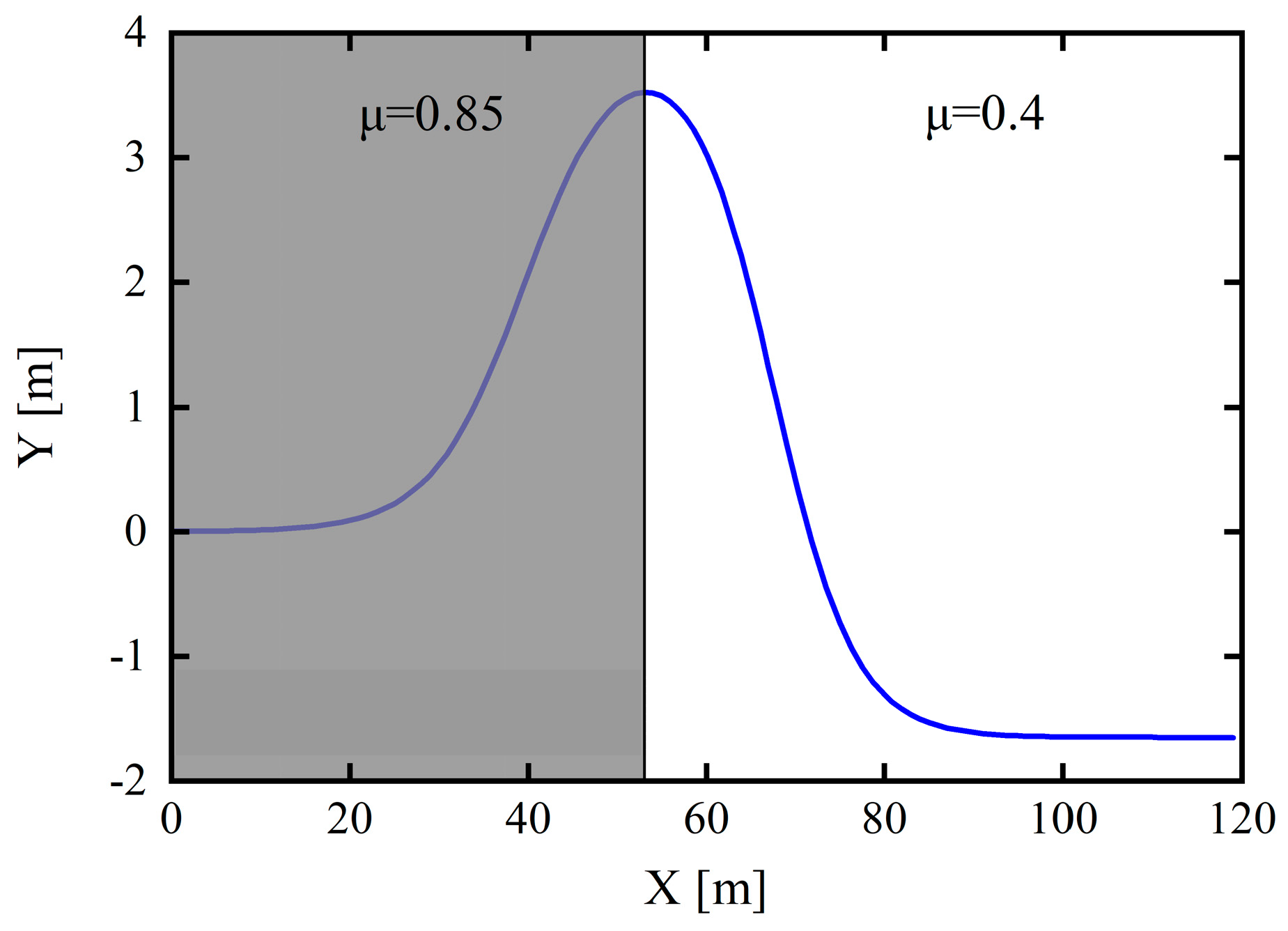
To further verify the improvement effect of the proposed dynamic prediction time-domain adaptive model on the improved AMPC, the simulations were verified via tracking the double-lane-shift trajectory at the vehicle speed of 50 km/h on a docking road surface.
Based on the typical double-lane-shift conditions to verify the control performance of the improved AMPC and the adaptability to the vehicle driving state, the vehicle speed was set to 50 km/h on a docking pavement (road adhesion coefficient (μ) of 0.85–0.4) and the road adhesion coefficient was 0.85 for a longitudinal displacement of 0–53 m and 0.4 for a displacement of 53–120 m. The docking road conditions are depicted in
Figure 15, and a comparison of the simulation results is provided in
Figure 16.
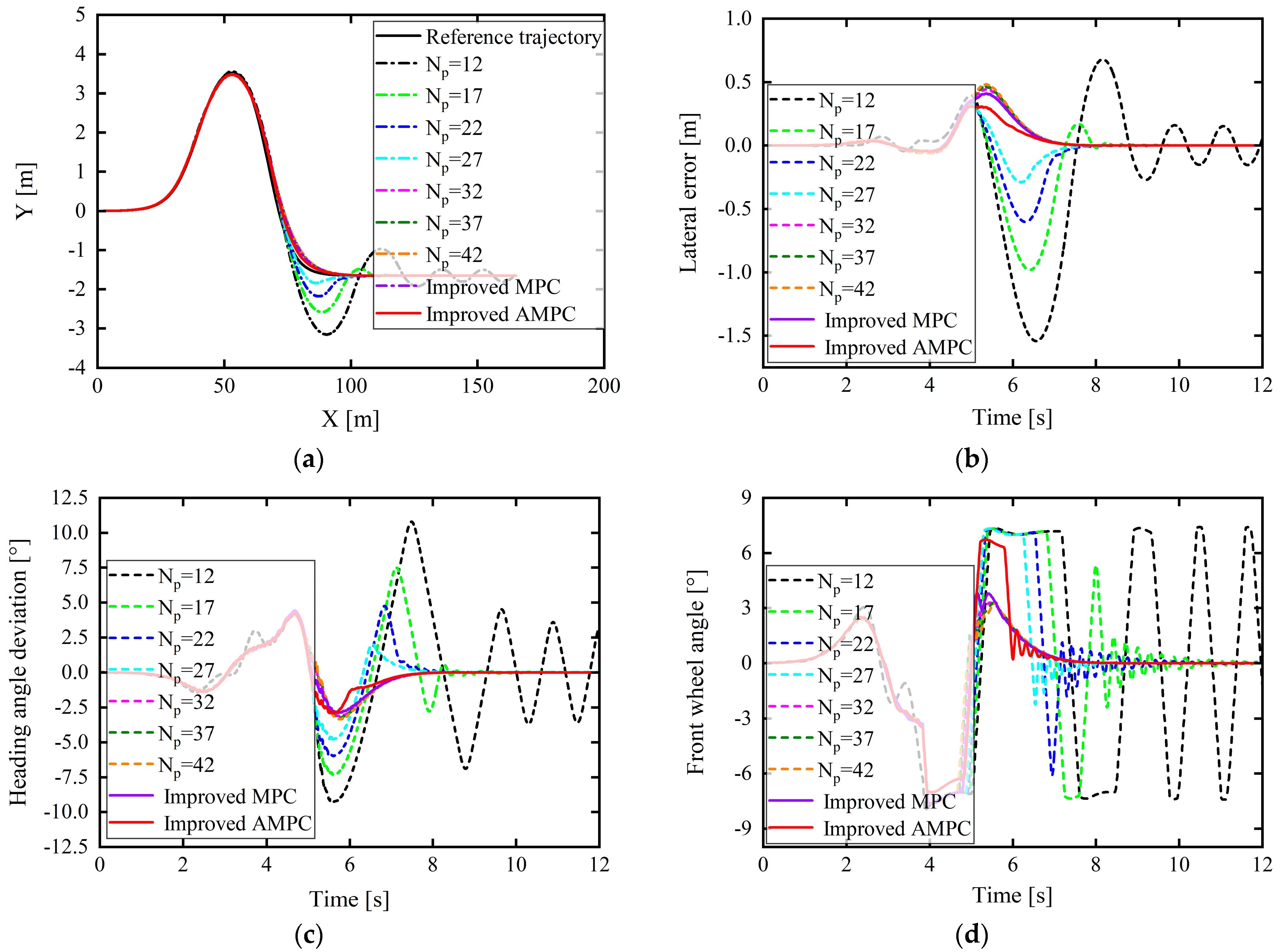
The MPC that incorporates the proposed dynamic prediction time-domain adaptive model is referred to as the improved MPC, and the MPC that combines the dynamic prediction time-domain adaptive model and tire cornering stiffness adaptive correction model is referred to as the improved AMPC. As can be seen in
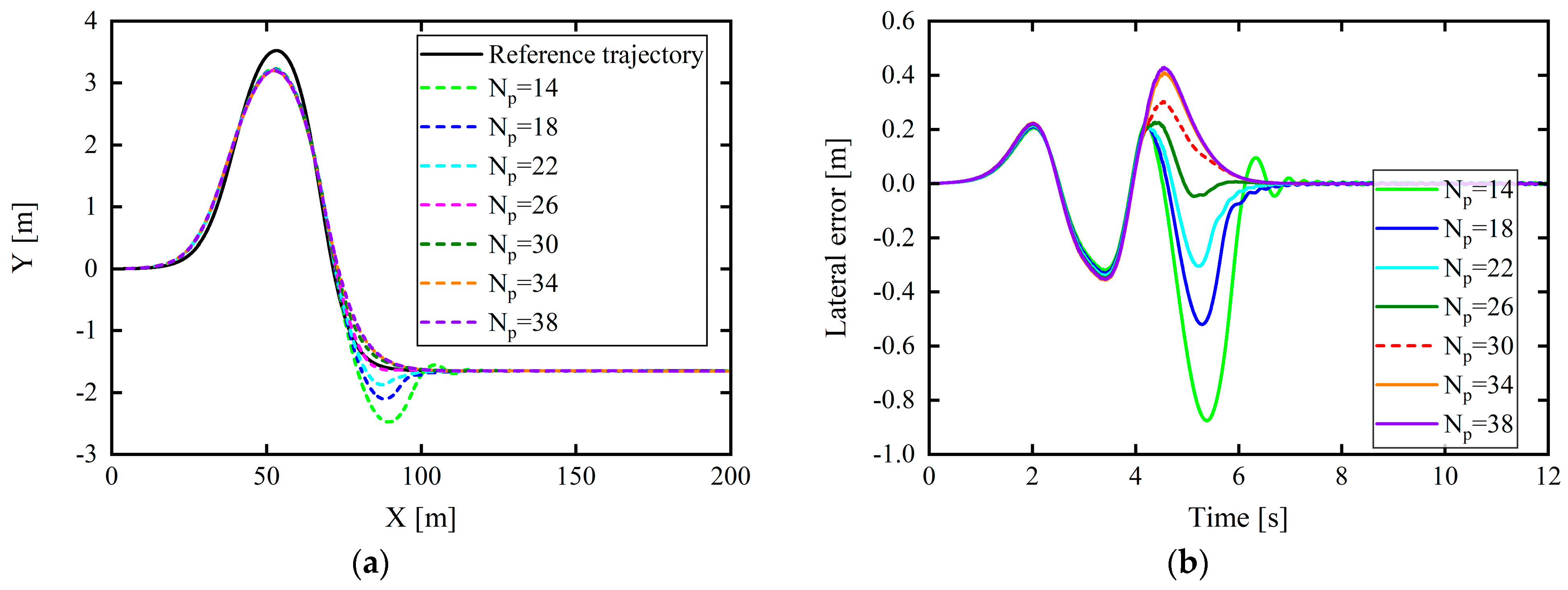
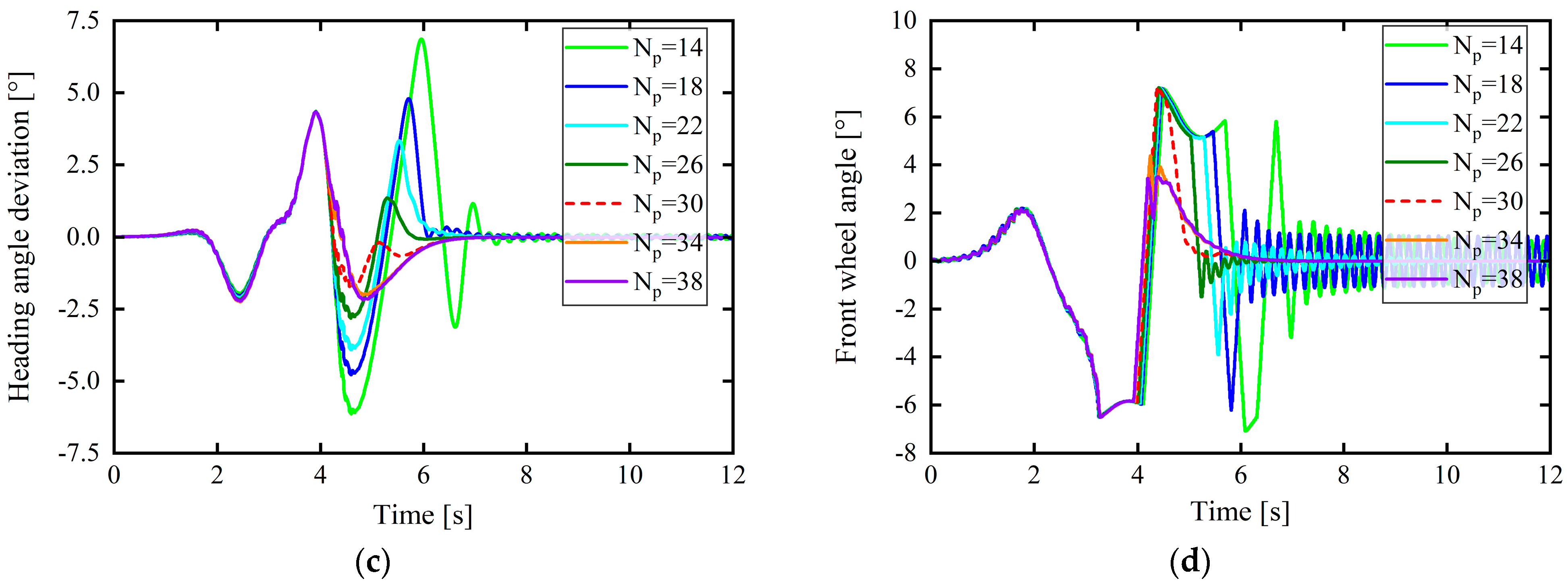
Figure 16, when the vehicle speed is 50 km/h on the docking road and the prediction time-domain steps are selected as 12, 17, and 22, the controller cannot track the desired path. Further, when
was set to 27, 32, 37, and 42, although the controller could track the reference path, the tracking error was large. When the prediction time domain is 17 and 22, it can be seen that within 0–53 m, due to good road adhesion conditions, the controller can track the desired path. However, when the displacement reaches 53–120 m under low-adhesion road conditions, the tracking error is large owing to the controller’s insufficient prediction of the external environment: the desired path can thus not be tracked, and the control effect is poor.
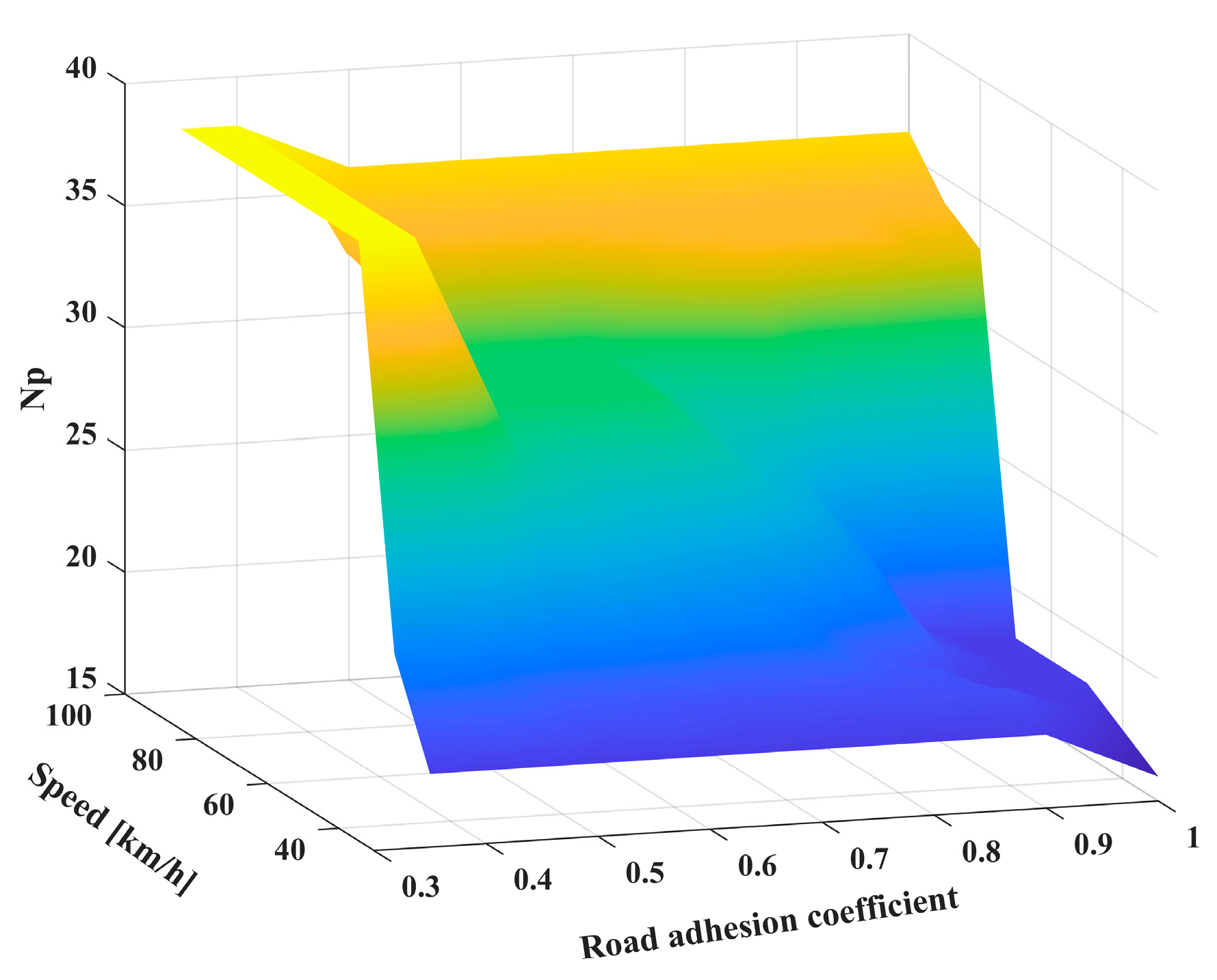
When the prediction time domain is selected as the step size obtained under the AD model, the controller can track the entire variable attachment section of the reference path, indicating that the designed dynamic prediction time-domain adaptive model is correct. At 0–53 m of the high-adhesion road section, the AD model calculates a smaller step size of 19 for the prediction time domain, which improves the calculation efficiency. At 53–120 m, the AD model calculates an
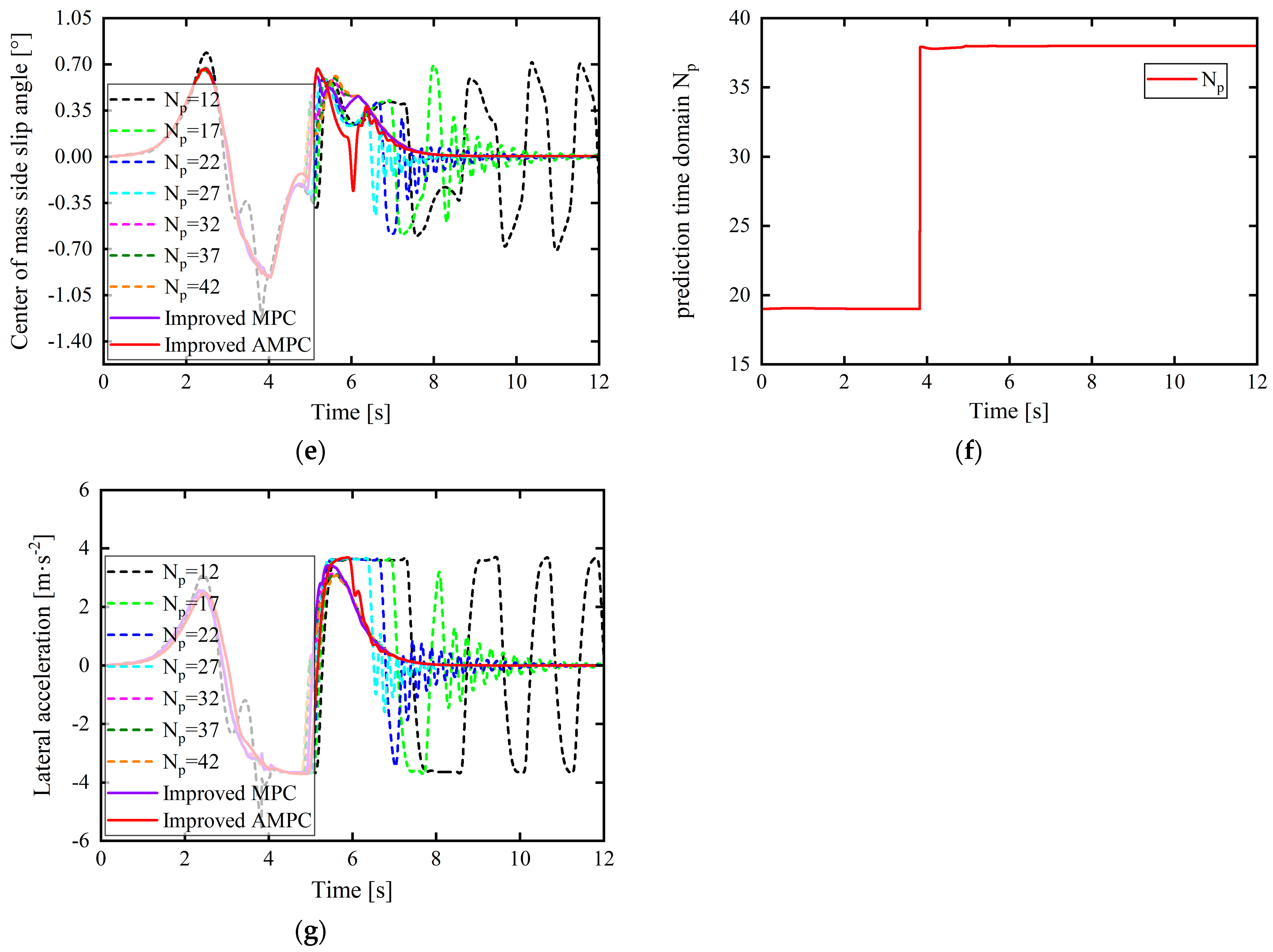
of 38, which can accurately predict the future state of the vehicle as well as improve the tracking accuracy and driving stability. The changes in the values calculated using the dynamic prediction time-domain model are exhibited in
Figure 16f.
In
Figure 16, for the docking road condition with the road adhesion coefficient from 0.85–0.4, it can be found from
Figure 16e that the vehicle center-of-mass sideslip angle under the improved AMPC control is reduced overall compared to the MPC control and that the center of mass the maximum value of the center-of-mass sideslip angle is less than 1°, which is far lower than the upper limit of the center-of-mass sideslip angle when the vehicle is driving stably under this adhesion coefficient condition. In
Figure 16g, when the vehicle is driving on a road where the road adhesion coefficient changes, the critical acceleration without sideslip is 0.85–0.4 g and the maximum value of vehicle lateral acceleration based on improved AMPC control is 3.704°, which does not even exceed 0.4 g (3.920°), and the lateral acceleration changes relatively smoothly. The analysis of
Figure 16e,g shows that under the action of the proposed controller, the vehicle will not suffer dangerous situations such as sideslip, and the stability of the vehicle while driving is guaranteed to a certain extent.
In addition, from
Figure 16b,c, on the basis of adding a dynamic prediction time-domain adaptive model (i.e., improved MPC) combined with the tire cornering stiffness adaptive correction (i.e., improved AMPC), the lateral position error and heading angle error of the vehicle tracking reference path are further reduced. Combined with
Figure 16e, the stability of the vehicle driving tracking is also ensured.
6. Conclusions
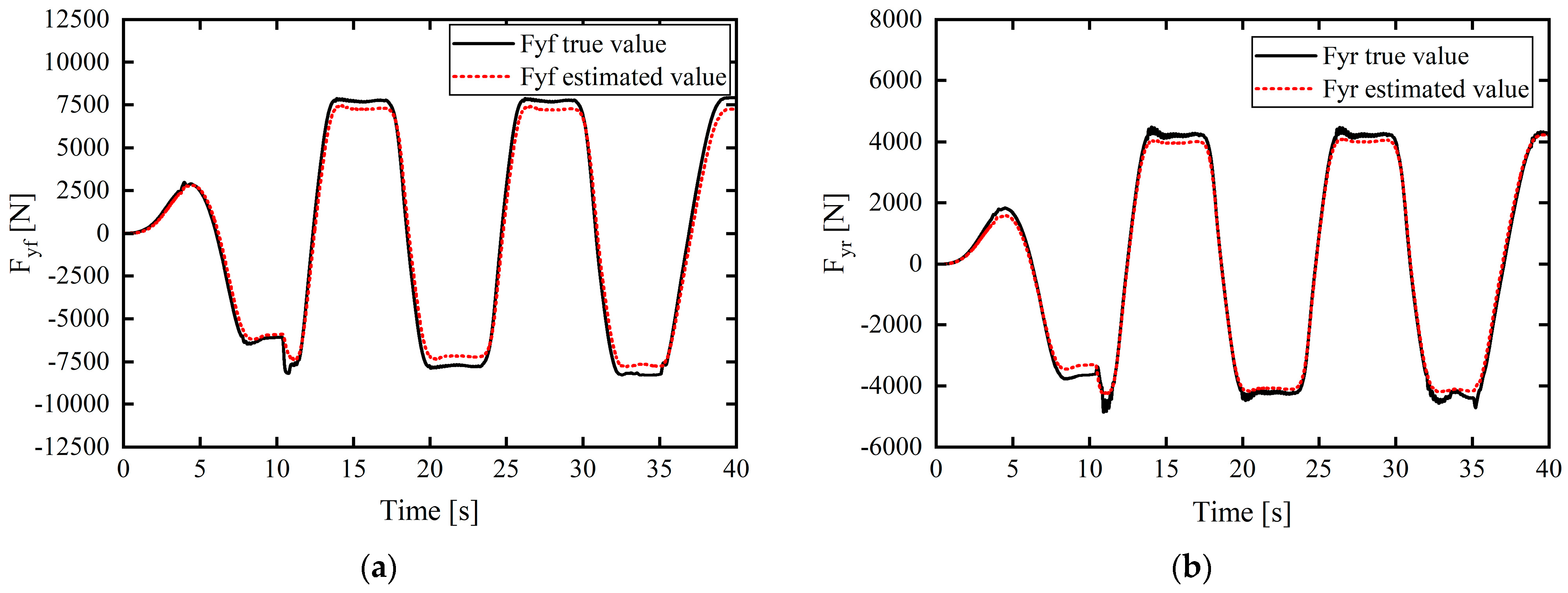
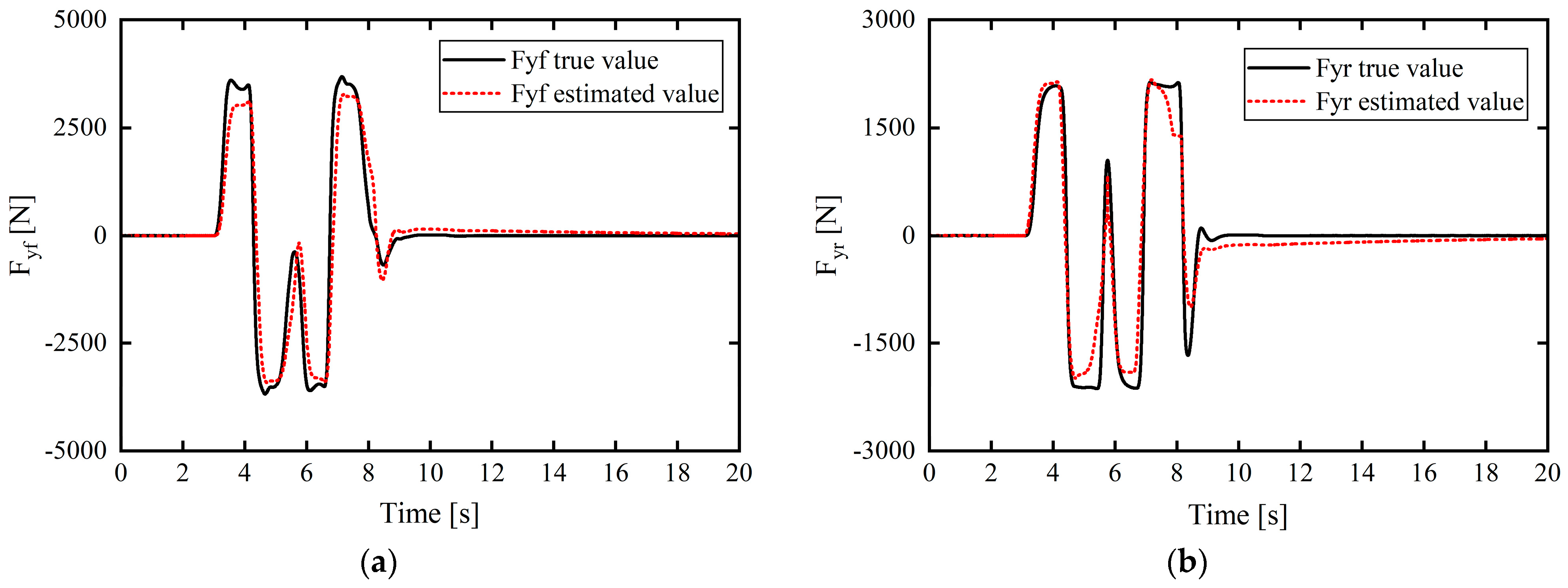
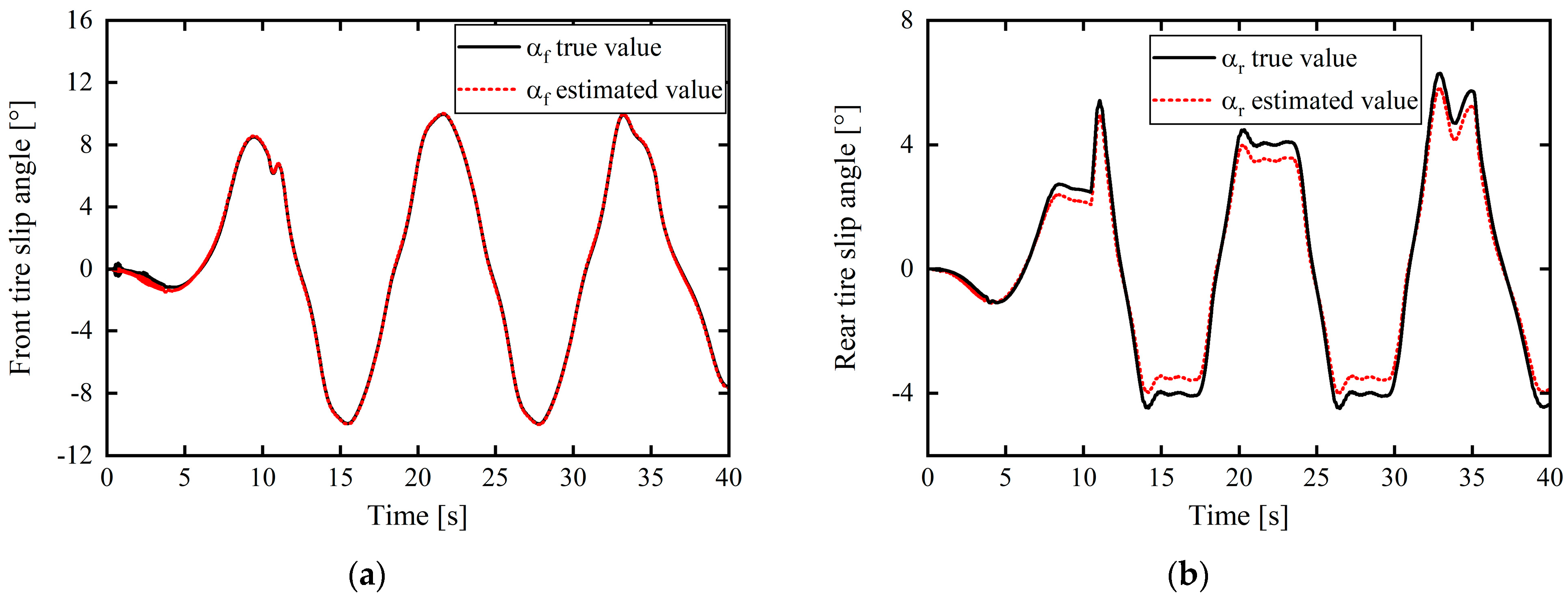
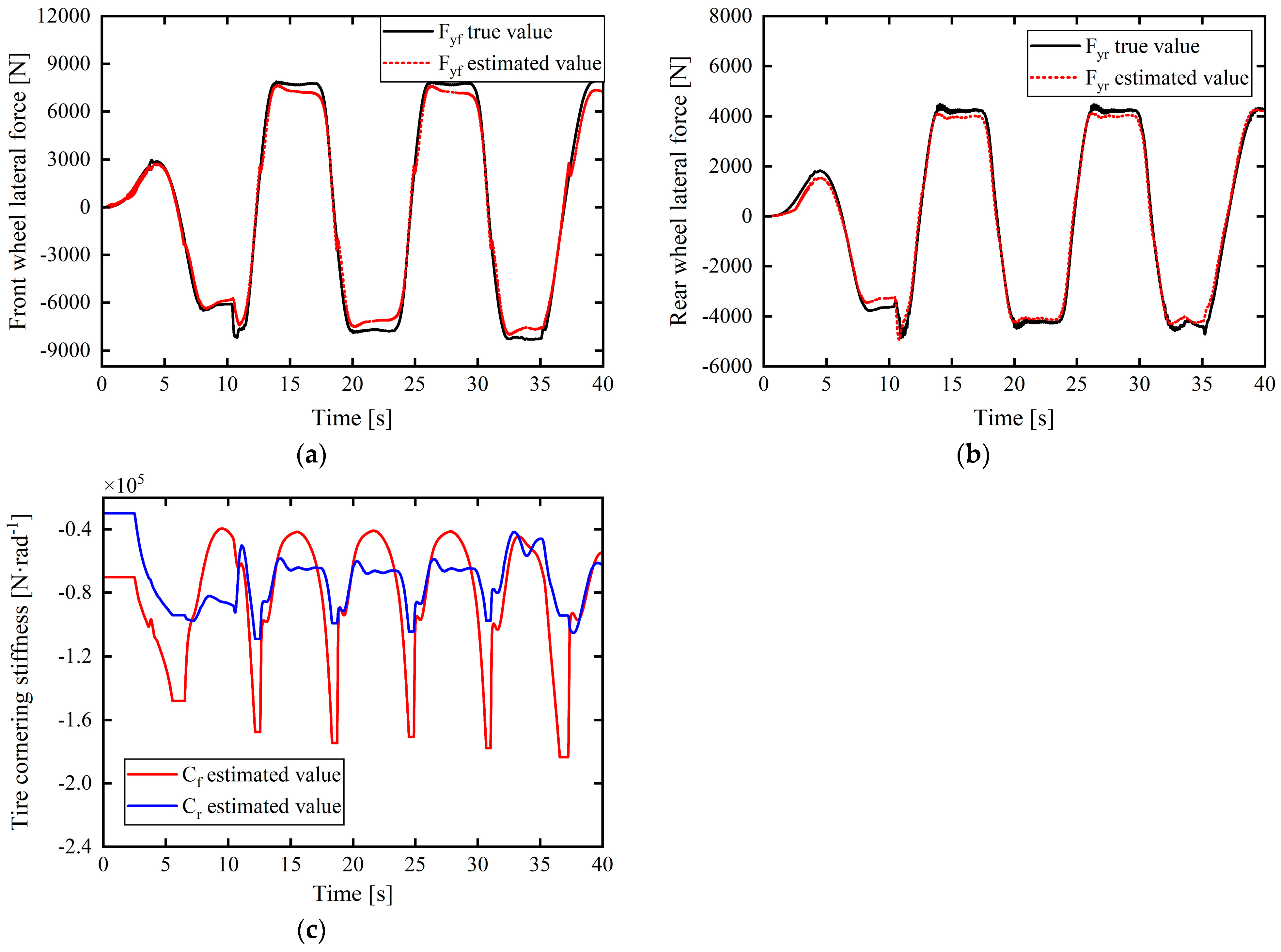
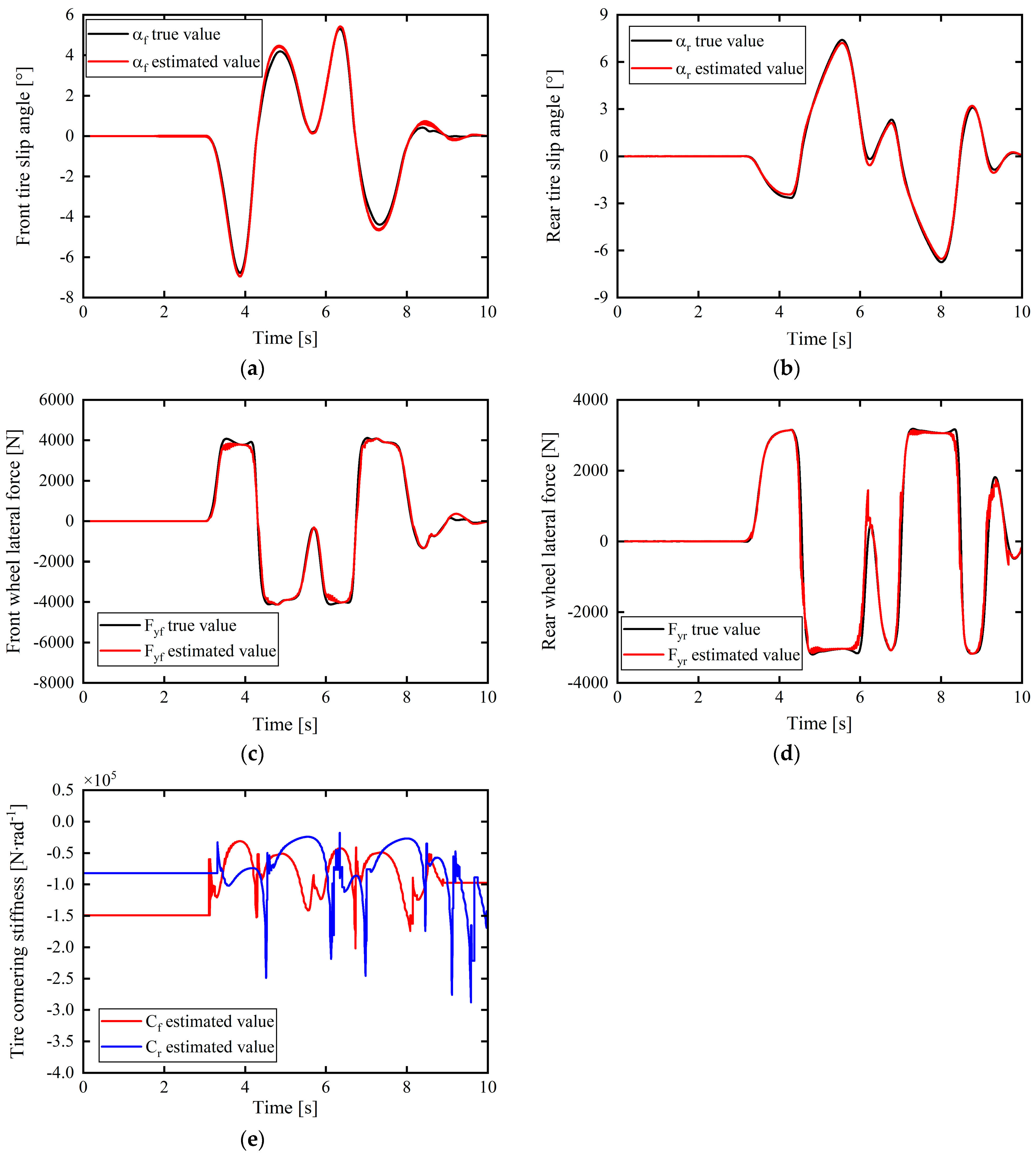
(1) A UKF was adopted to accurately estimate the tire lateral force in real time. With the vehicle body dynamics model and observed quantities, i.e., longitudinal vehicle speed and lateral and longitudinal acceleration, the prediction and measurement equations were modeled and then combined with the UKF to complete estimation of the tire lateral force. The simulated working conditions were verified and show that the proposed method can estimate the lateral tire force accurately and has excellent applicability in complex working conditions.
(2) Based on the real-time estimation of the tire lateral force, an adaptive tire cornering stiffness correction strategy was proposed. The linear tire lateral force calculated using a constant tire cornering stiffness has a certain error with respect to the real value, particularly under complex road conditions, and this error is large. With the proposed correction strategy, the tire lateral force calculated by the controller is as close as possible to the real value, as the tire cornering stiffness is compensated for in real time, improving the tracking accuracy and driving stability.
(3) During the path tracking of the vehicle, changes in vehicle speed and road adhesion conditions significantly impact the vehicle trajectory tracking effect and vehicle stability. Therefore, a dynamic prediction time-domain adaptive model was introduced into the MPC (i.e., AMPC) that includes adaptive correction estimation for the tire cornering stiffness. The prediction time-domain value is dynamically obtained according to the road adhesion condition and vehicle speed, so the trajectory is tracked more accurately, as demonstrated by the corresponding simulation verification.
Overall, compared with the traditional MPC, the proposed improved AMPC has enhanced trajectory tracking accuracy and driving stability under different road adhesions, is more adaptive to different road conditions, can handle control instability caused by sudden changes in road adhesion, and exhibits improved tracking accuracy. Thus, the proposed AMPC method is of great significance for improving the adaptability and robustness of intelligent vehicle tracking control systems.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}