
Wind-Induced Vibration Monitoring of High-Mast Illumination Poles Using Wireless Smart Sensors





Abstract
:1. Introduction
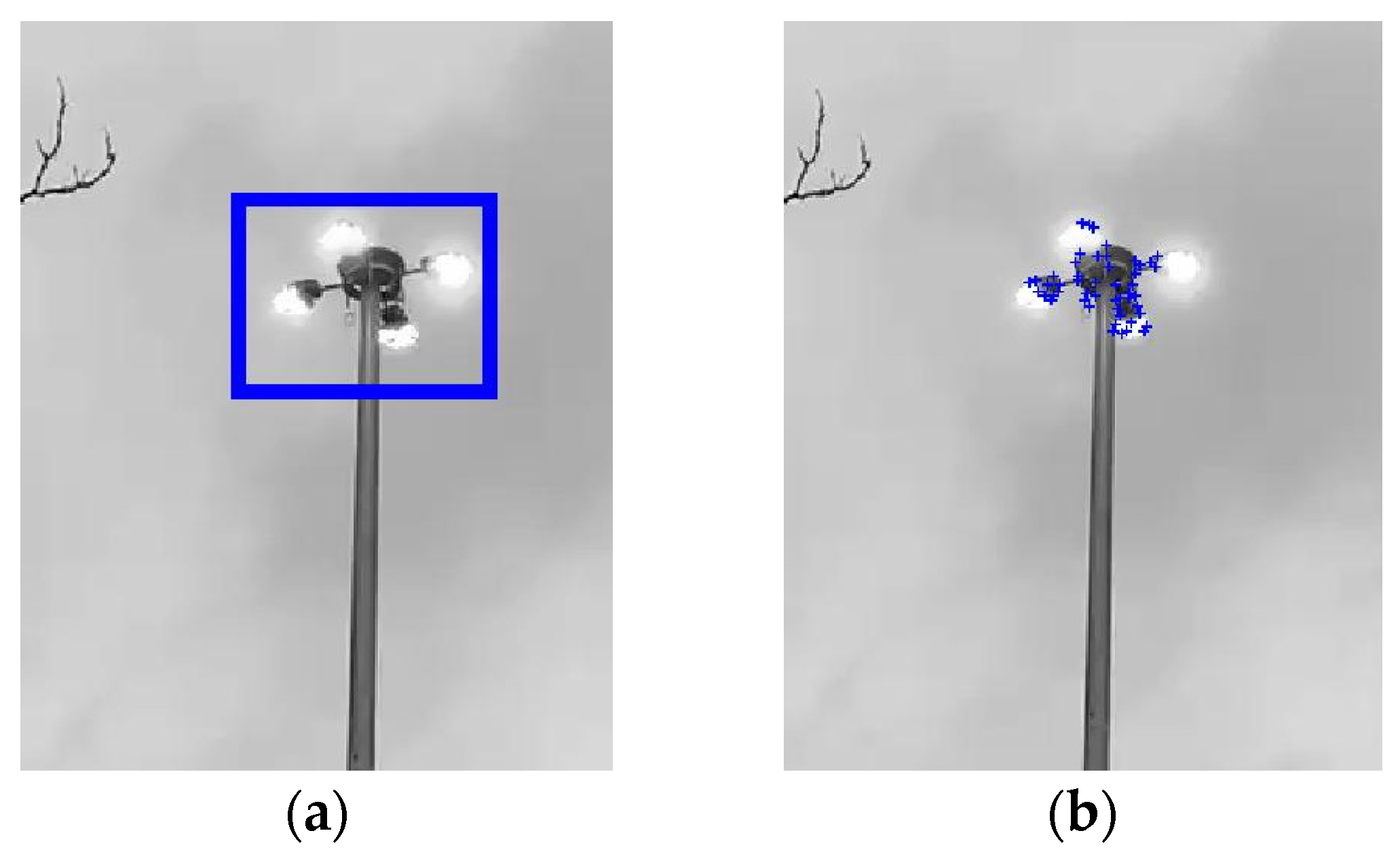
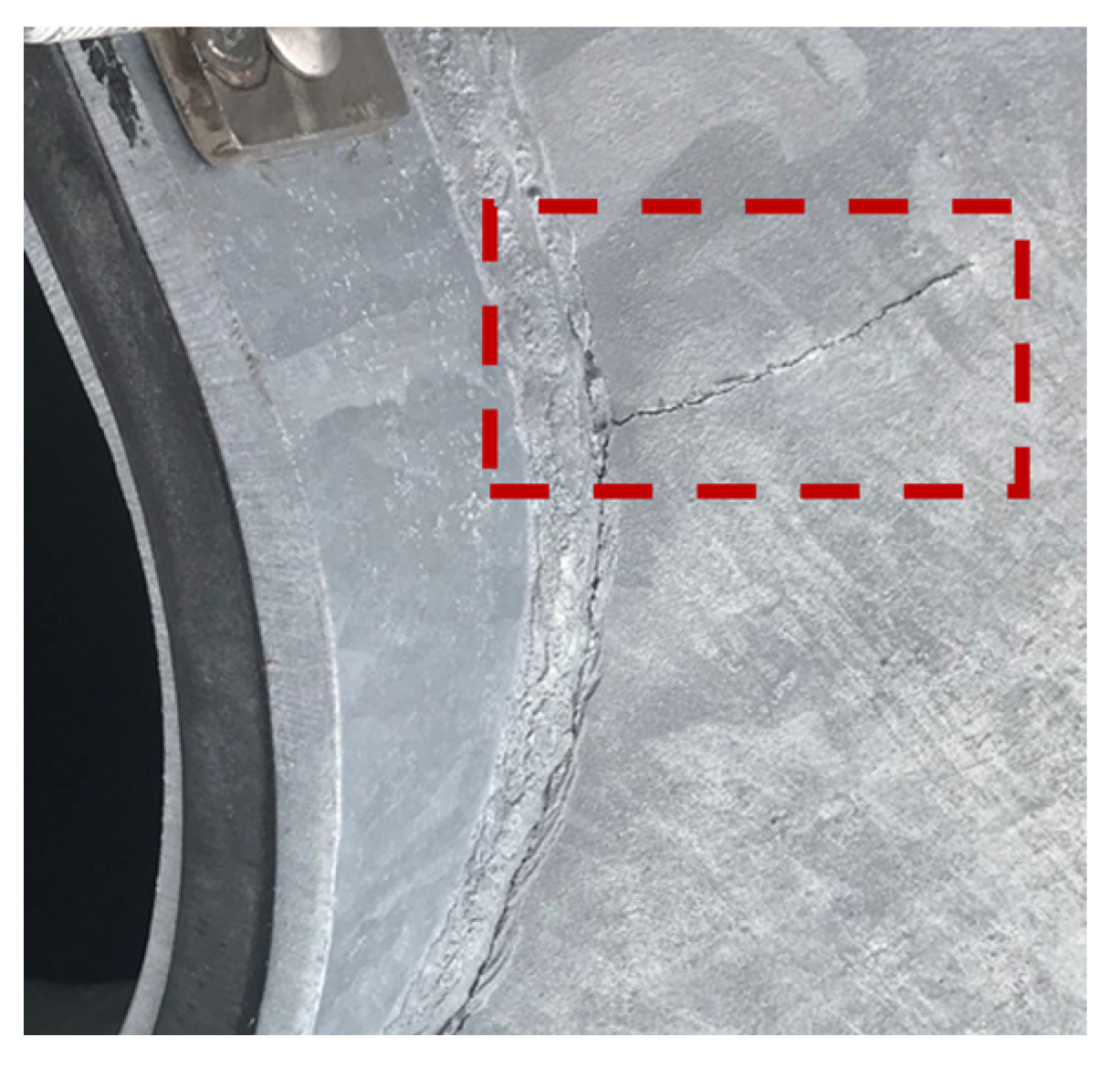
2. Preliminary Investigation
3. Long-Term Field Monitoring
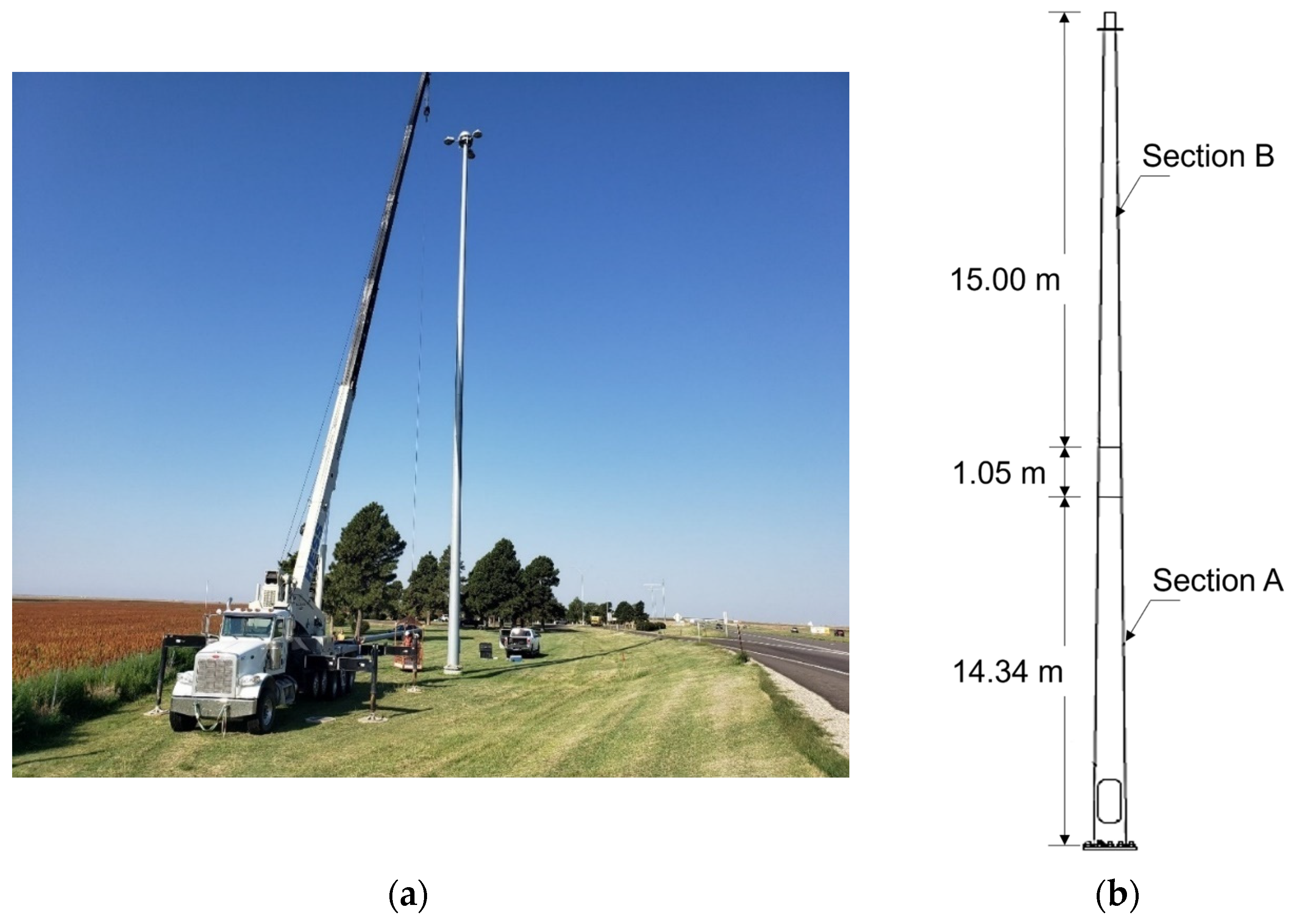
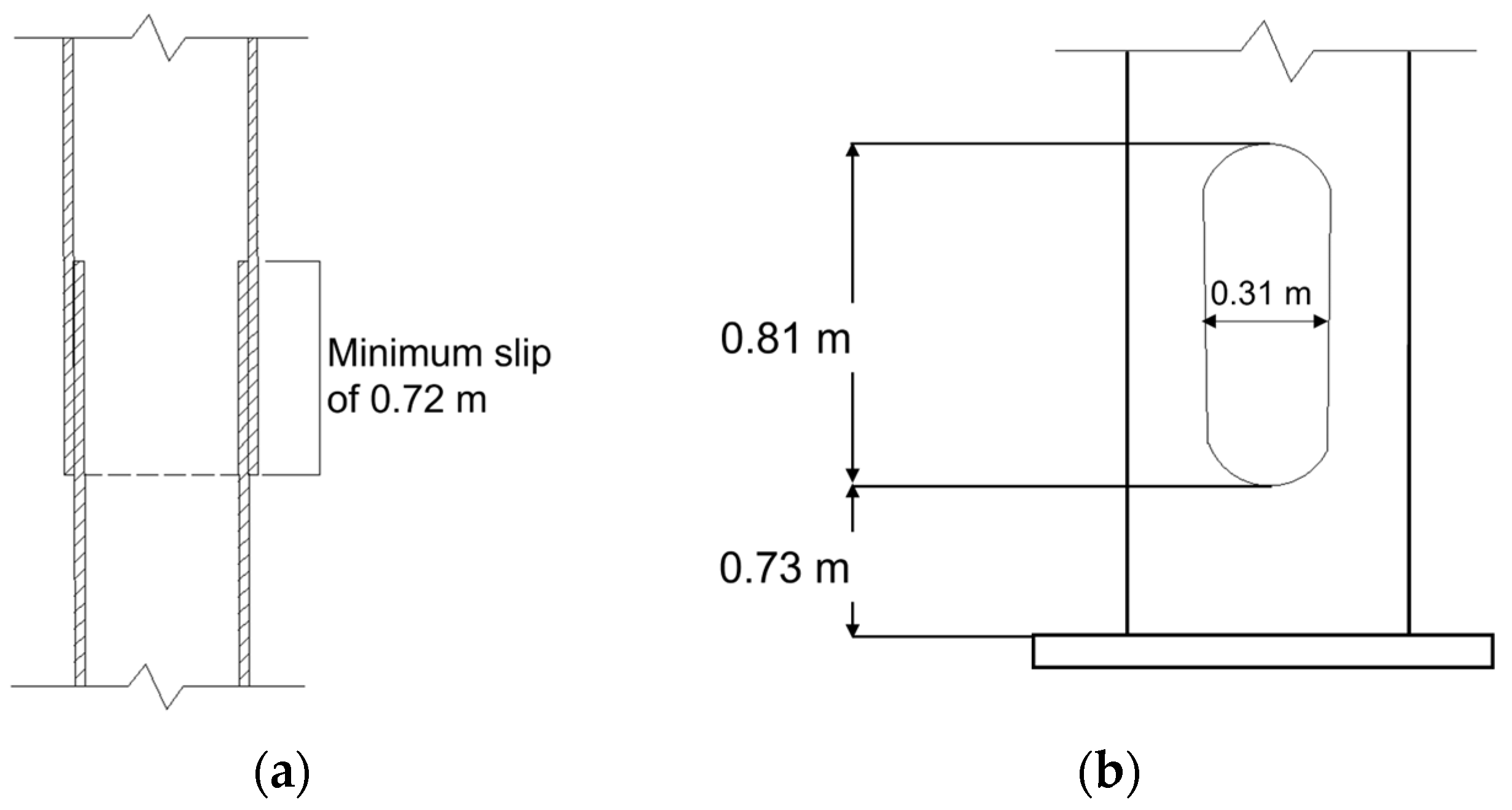
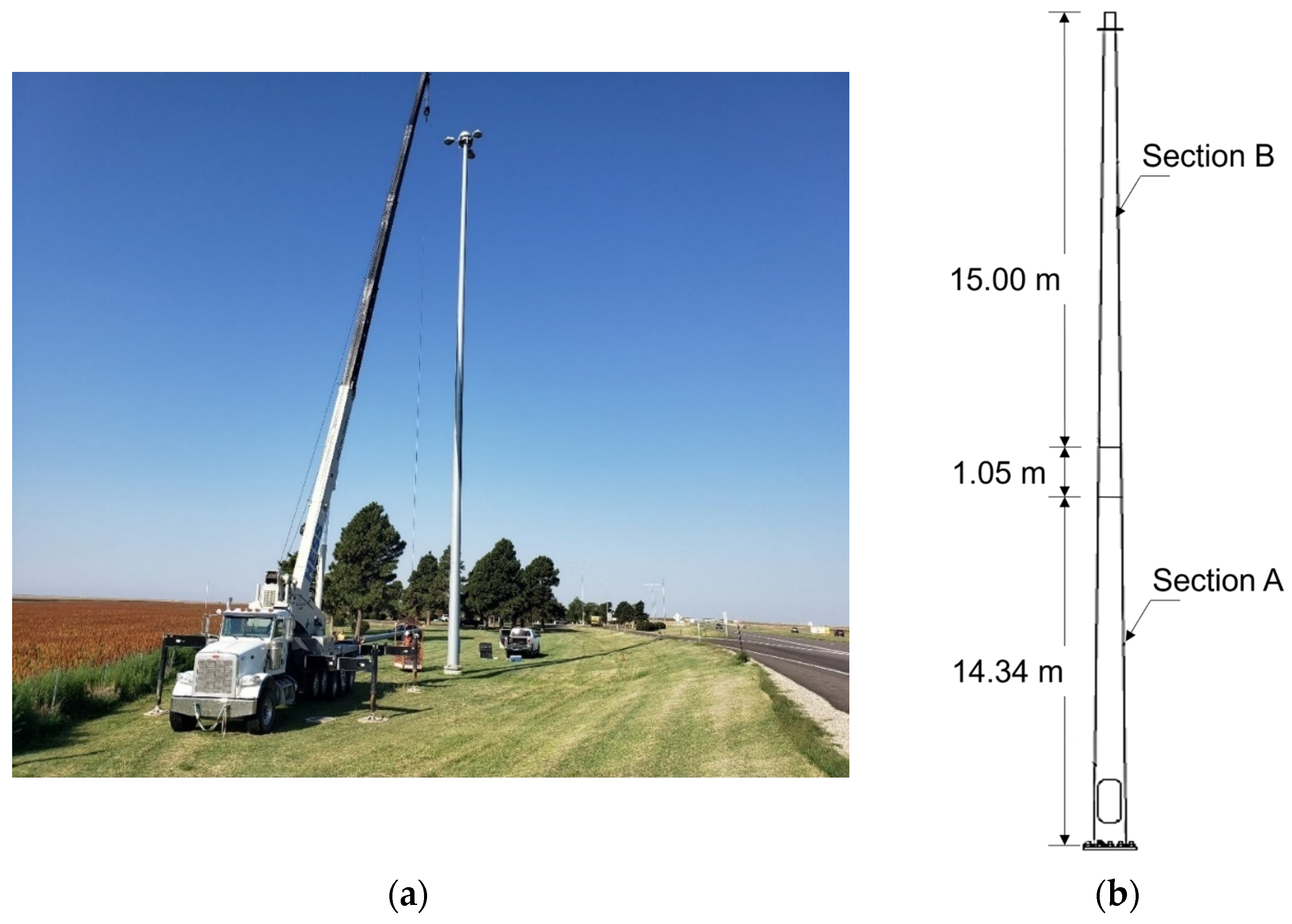
3.1. Location and Geometry of the Selected HMIP
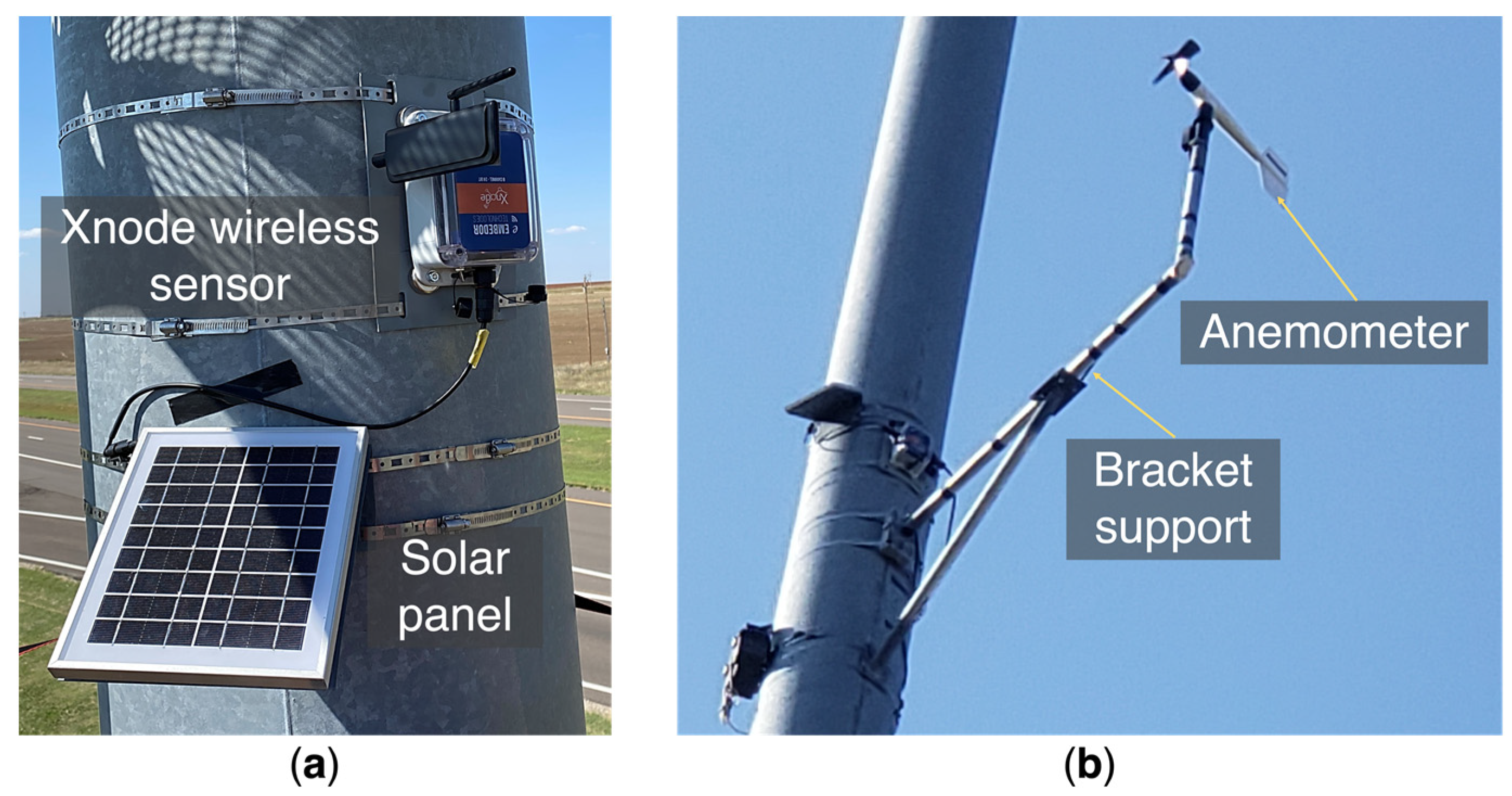
3.2. Wireless Smart Sensor Network
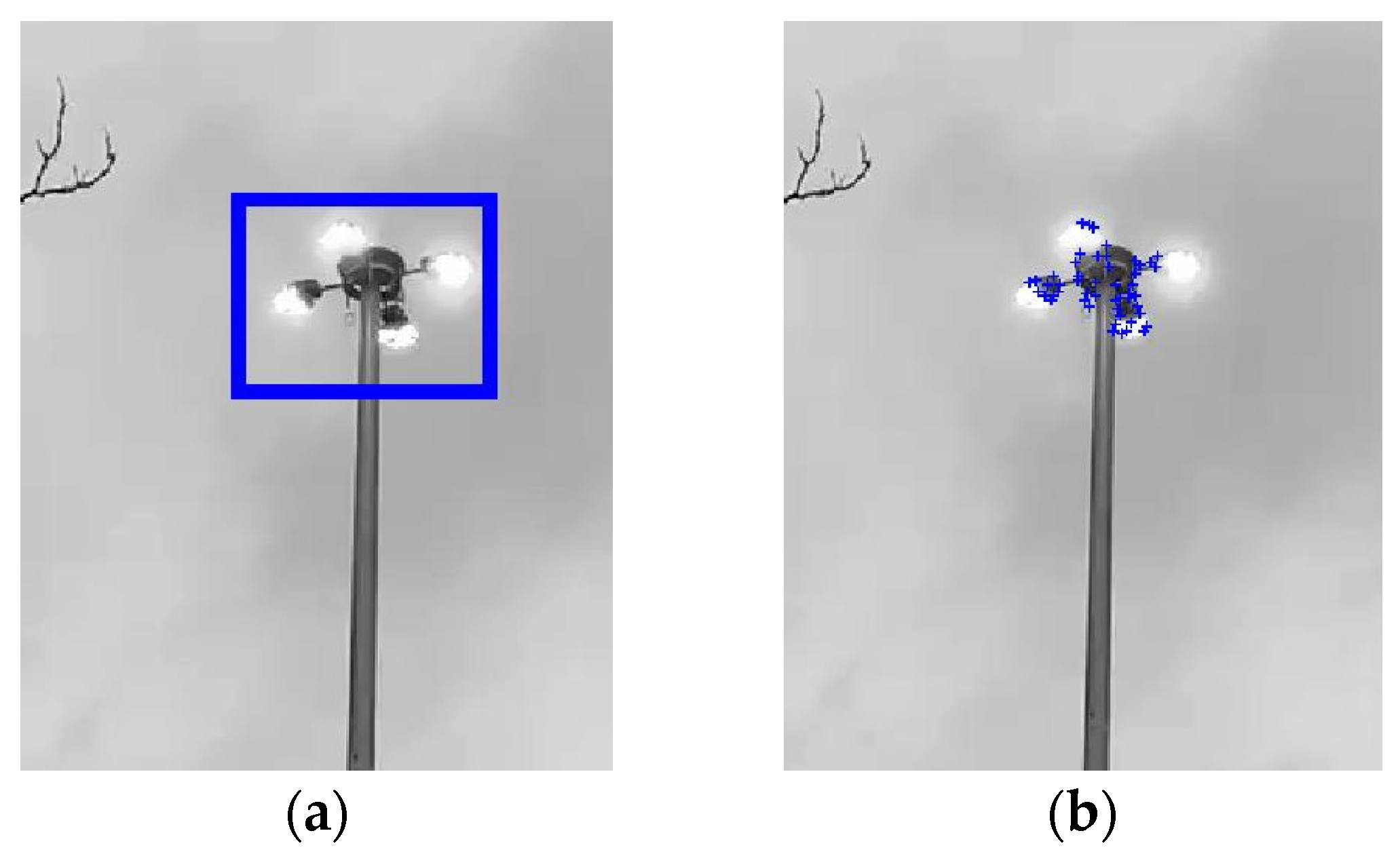
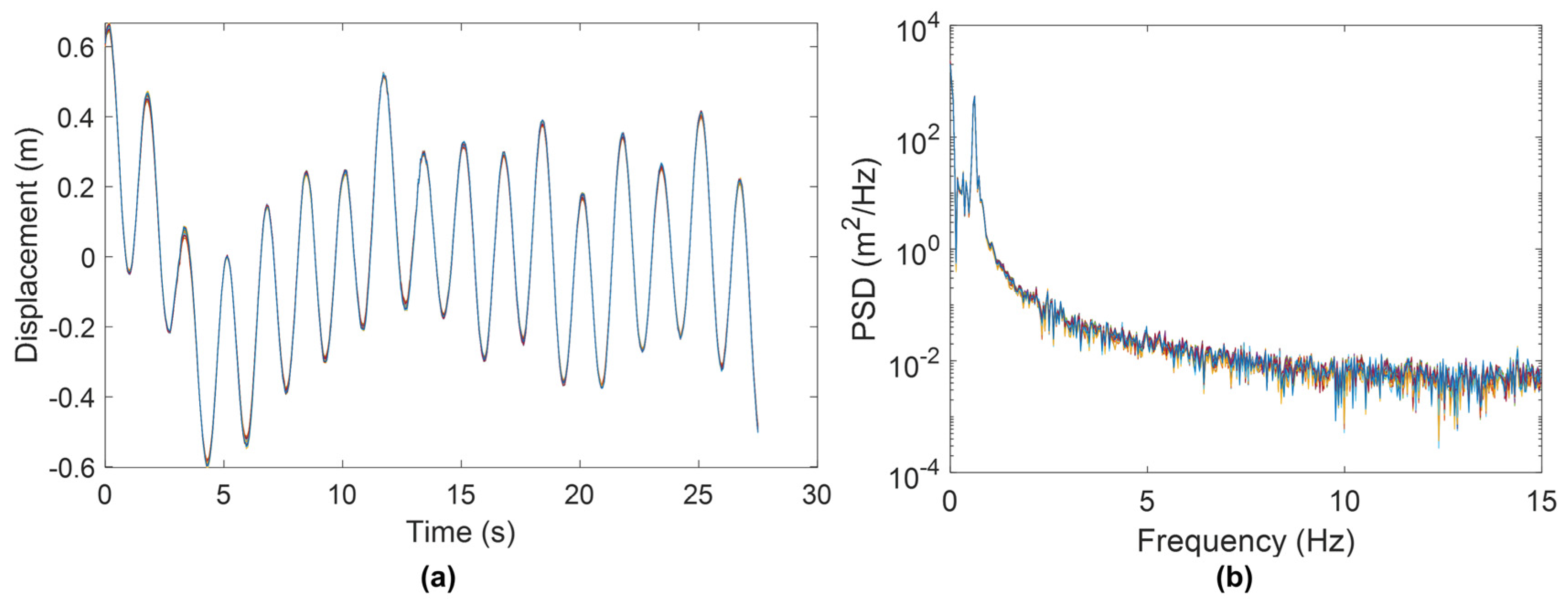
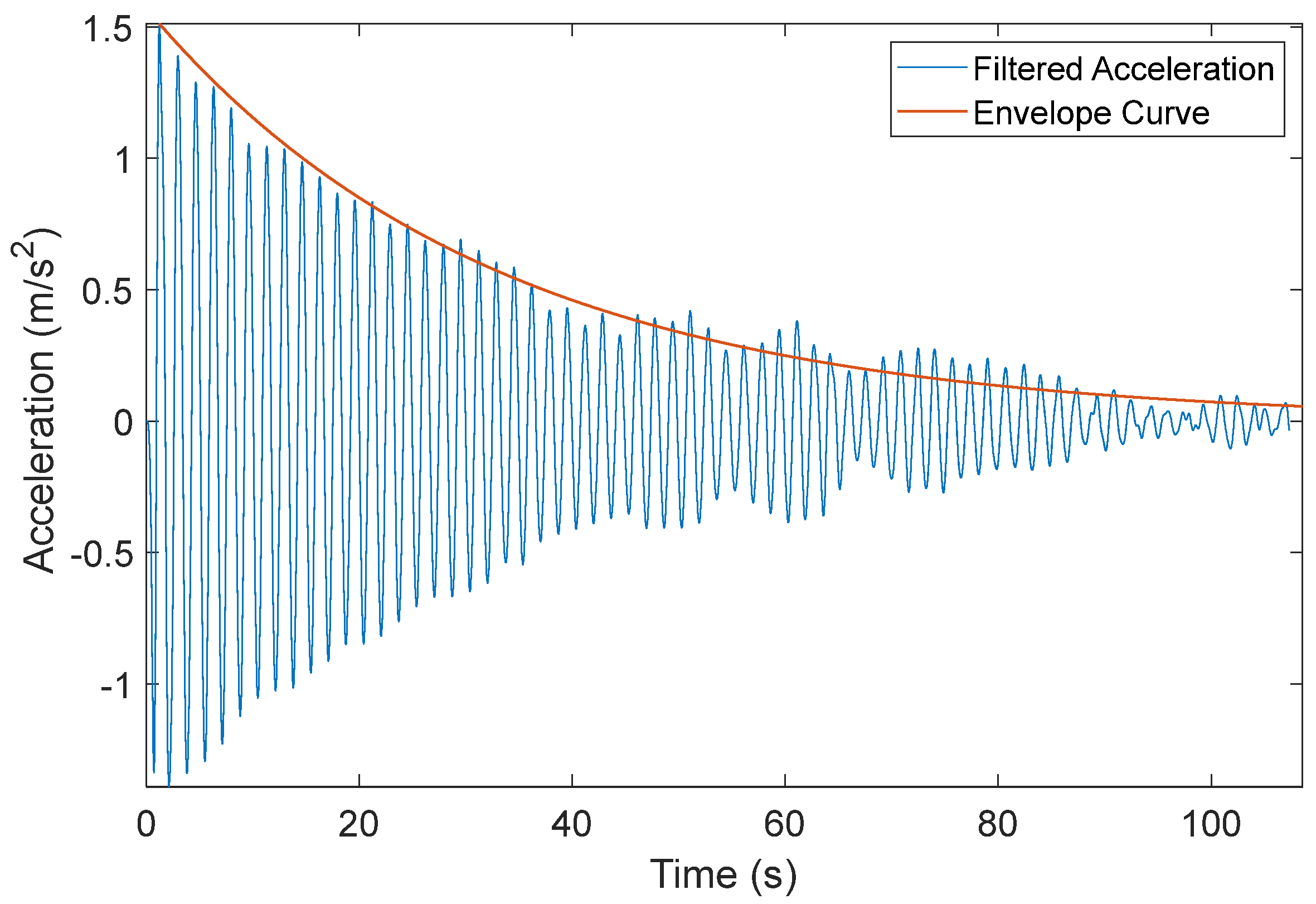
4. Pluck Test
5. Data from Long-Term Vibration Monitoring Results
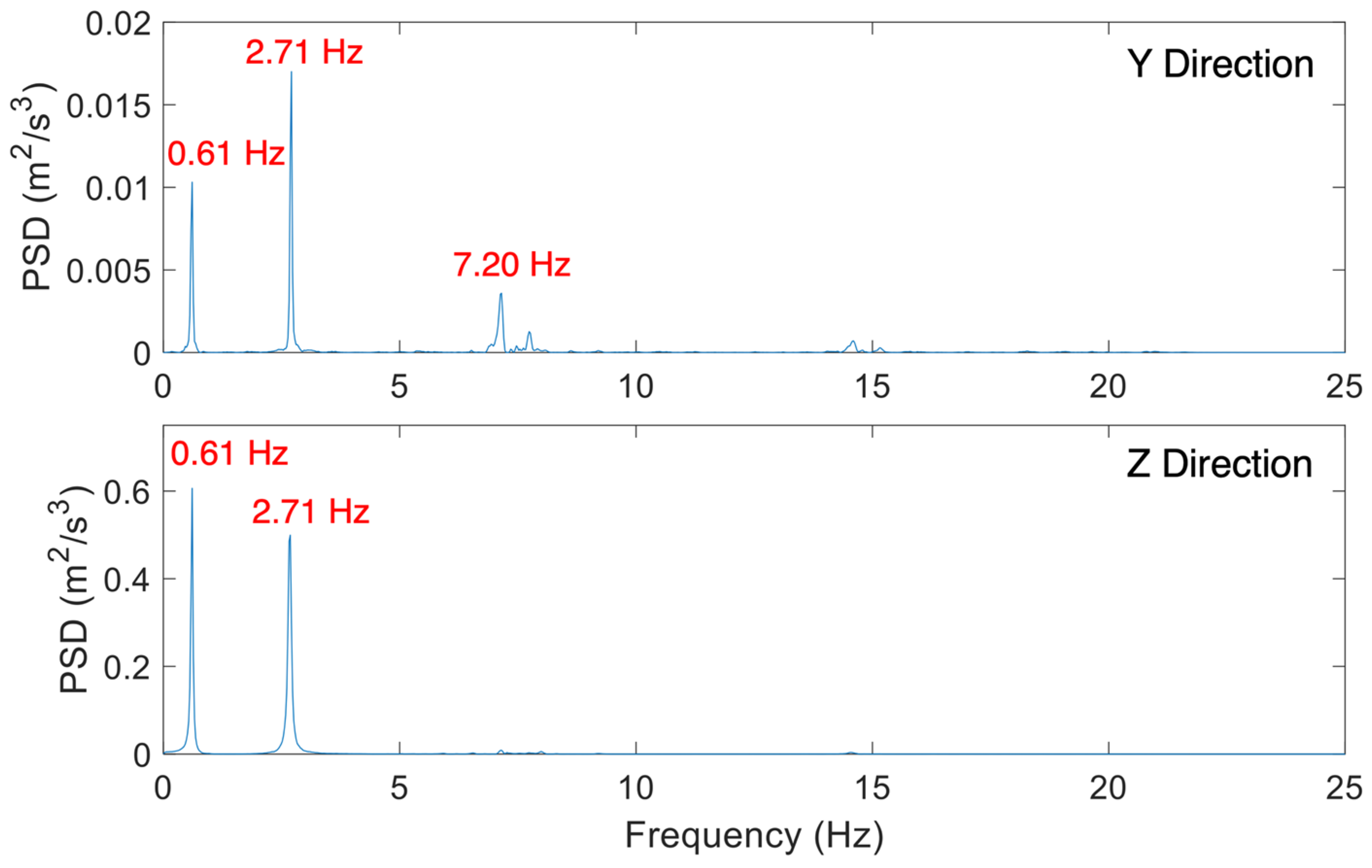
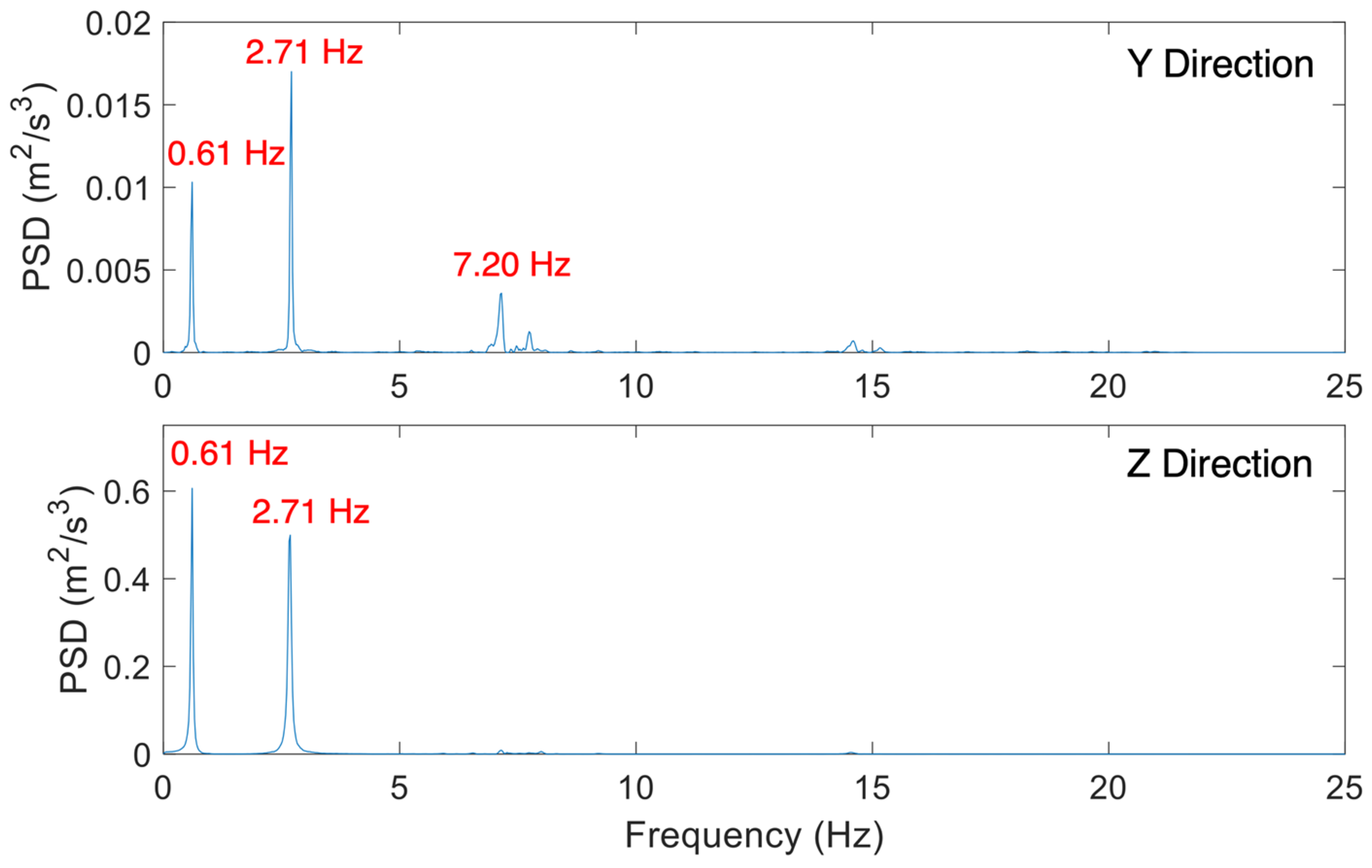
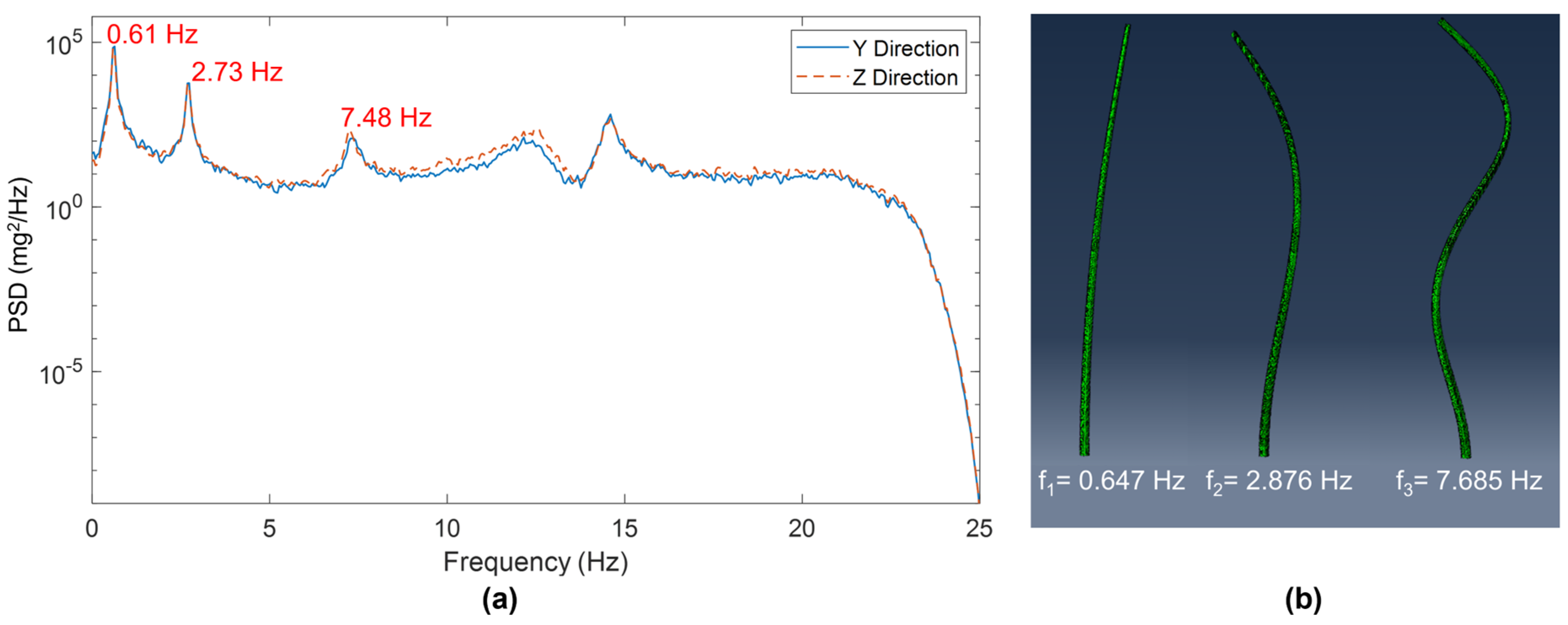
5.1. Identified and Analytical Modal Properties
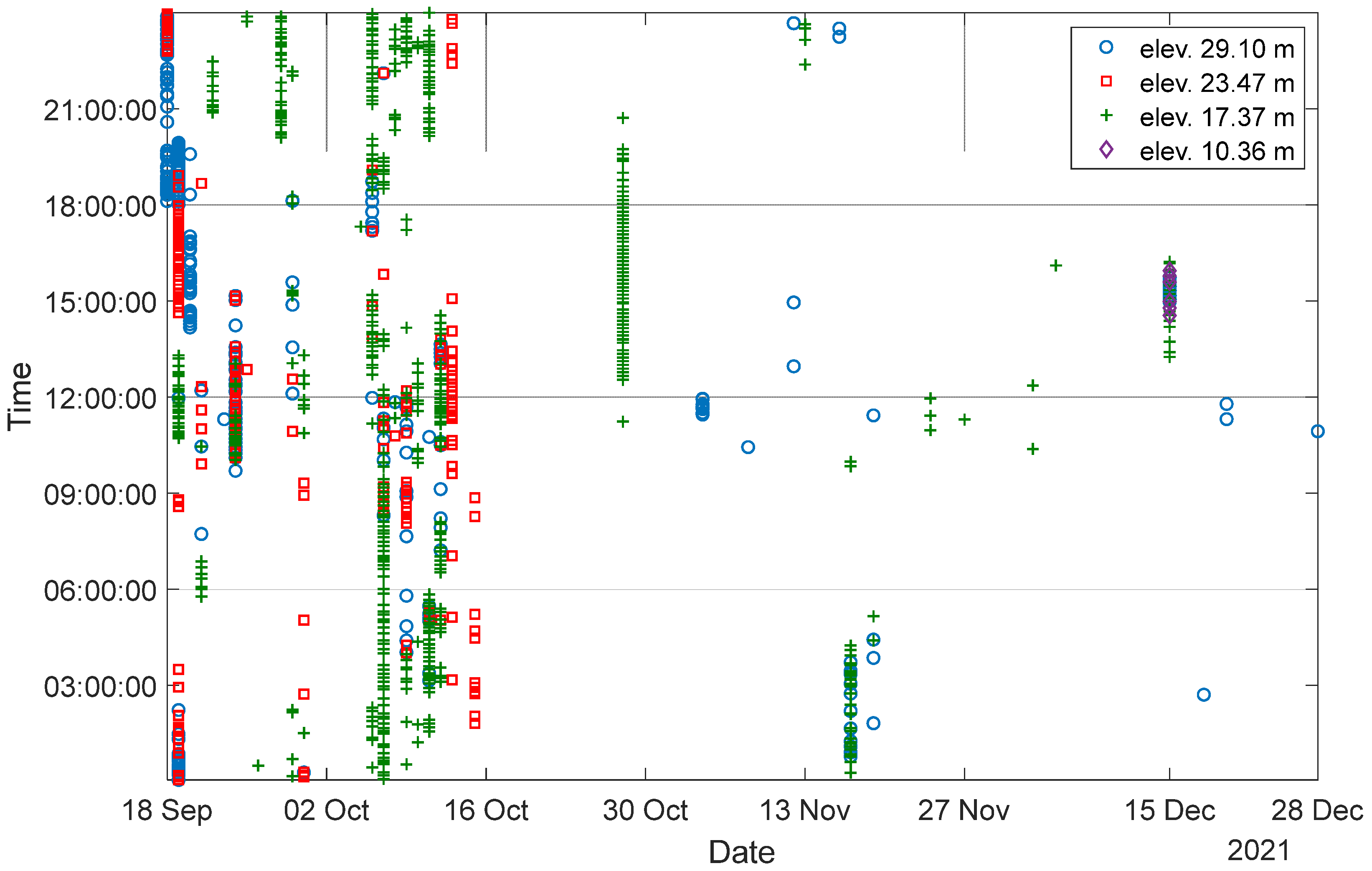
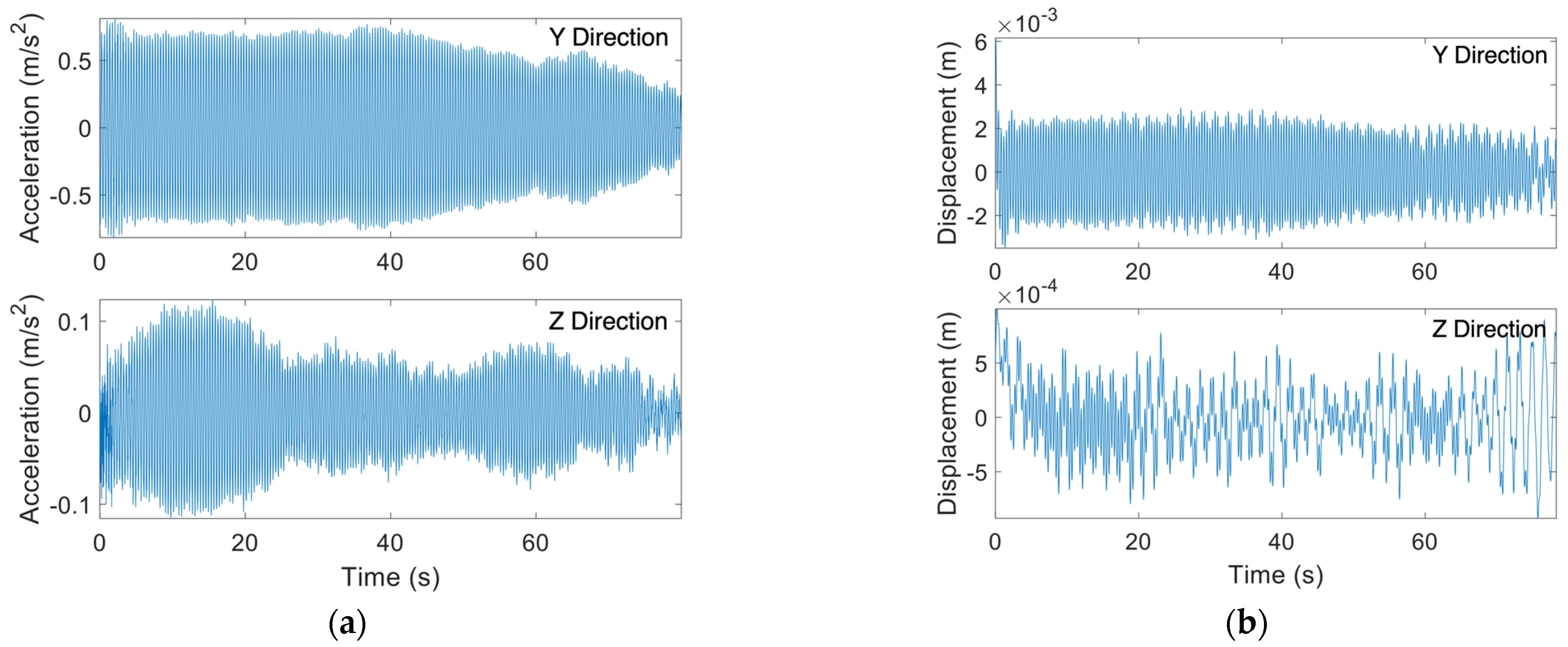
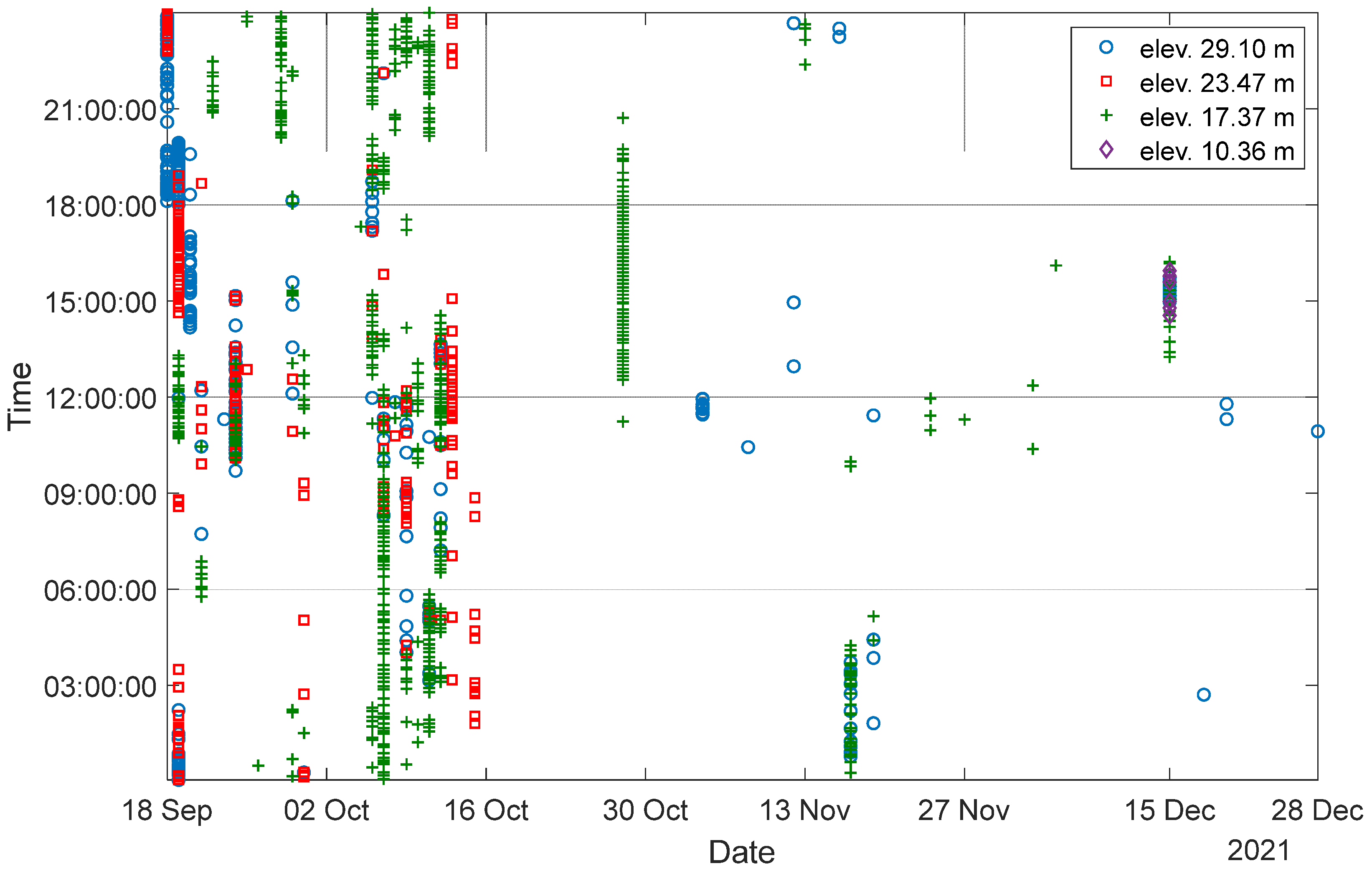
5.2. Data Analysis
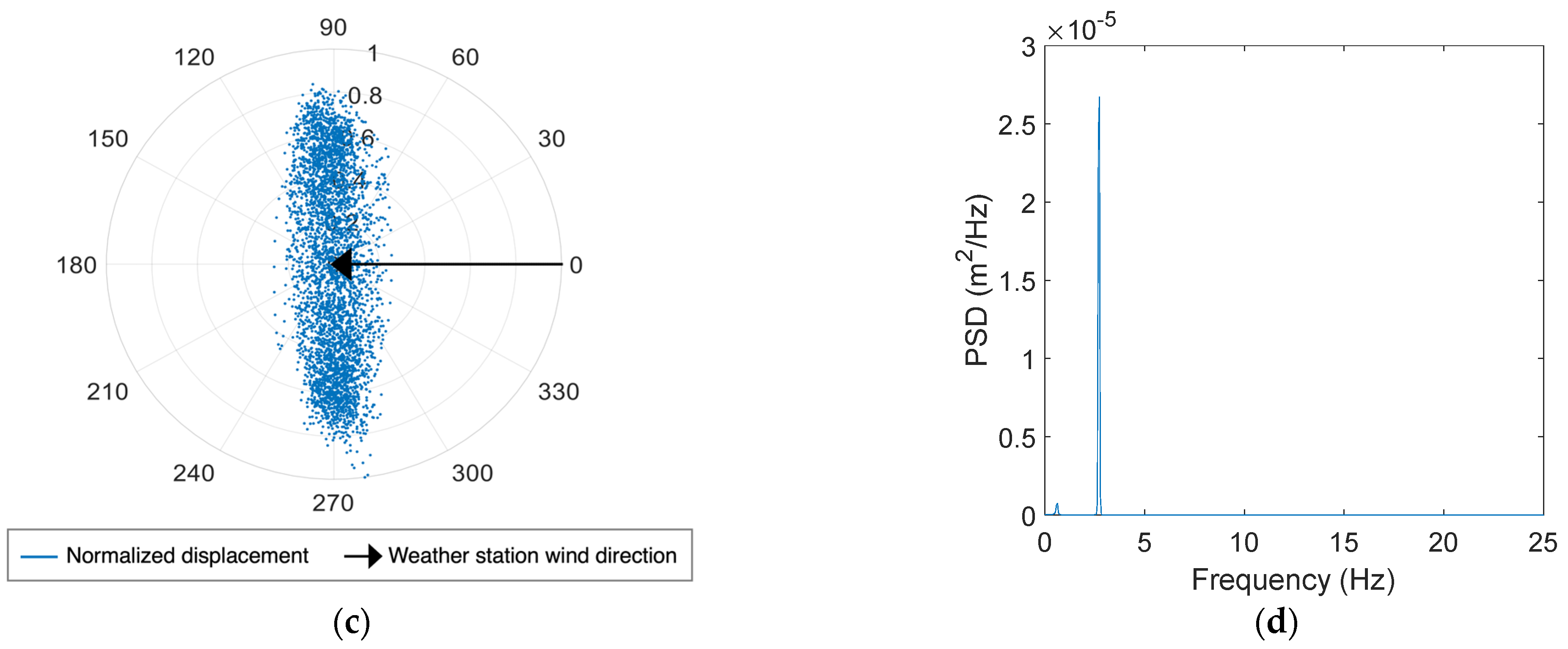
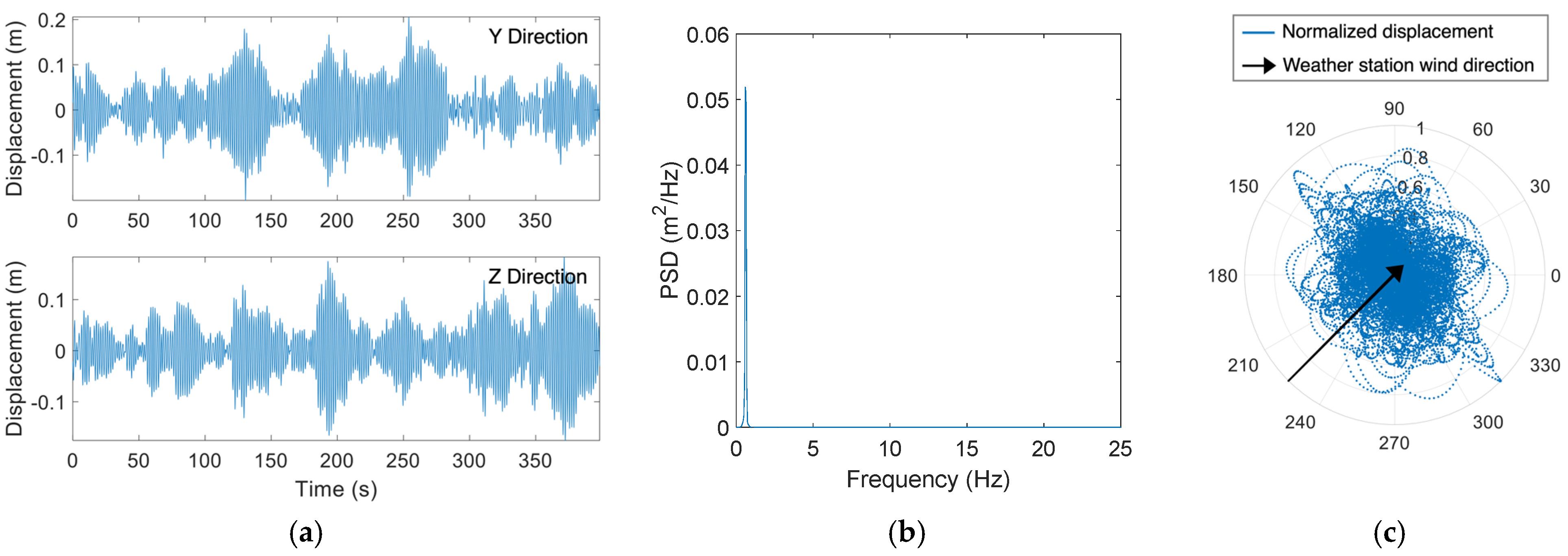
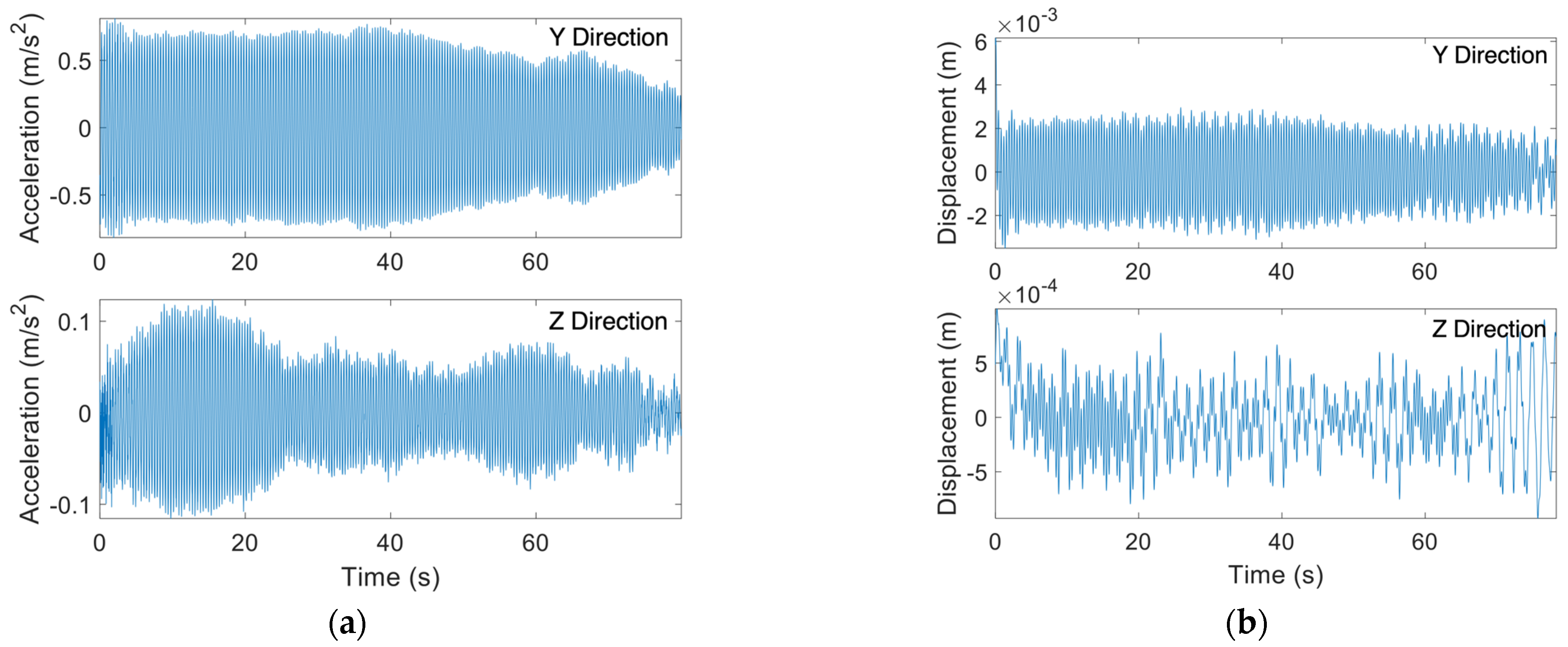
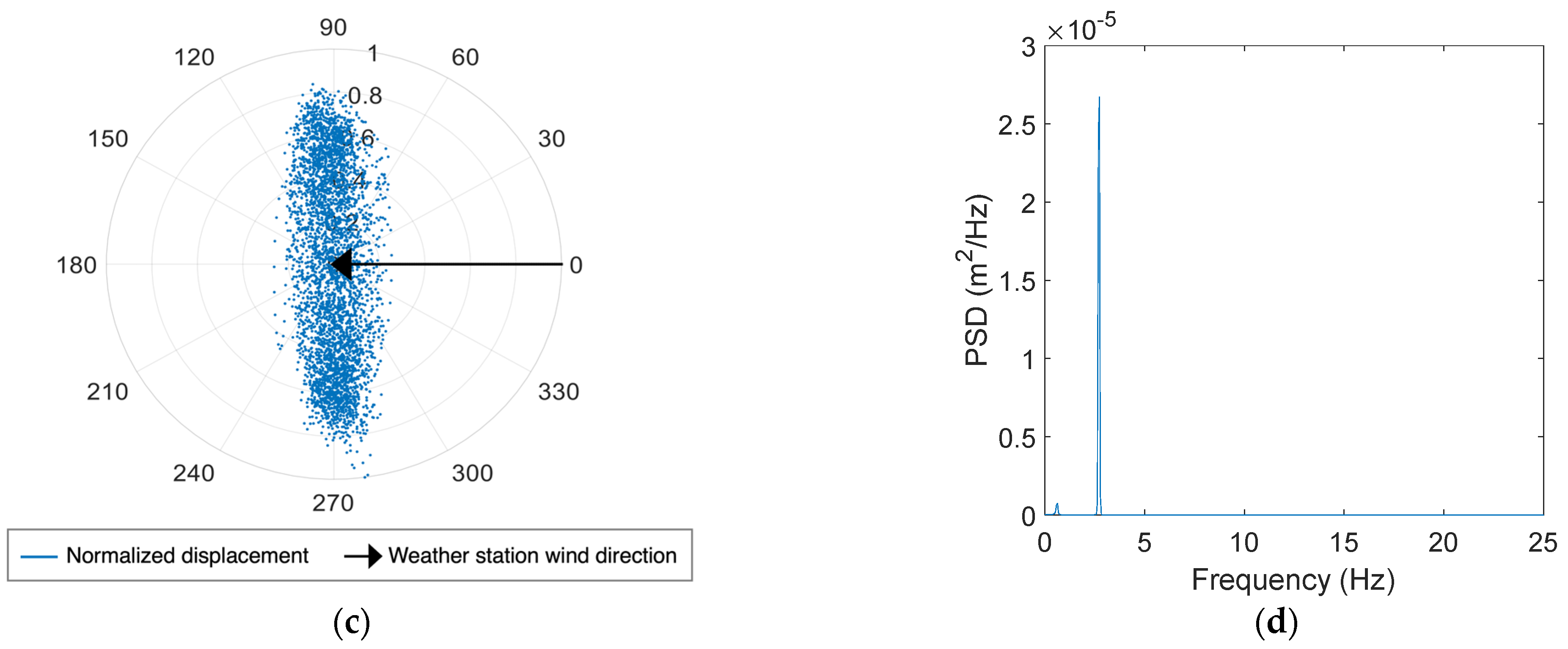
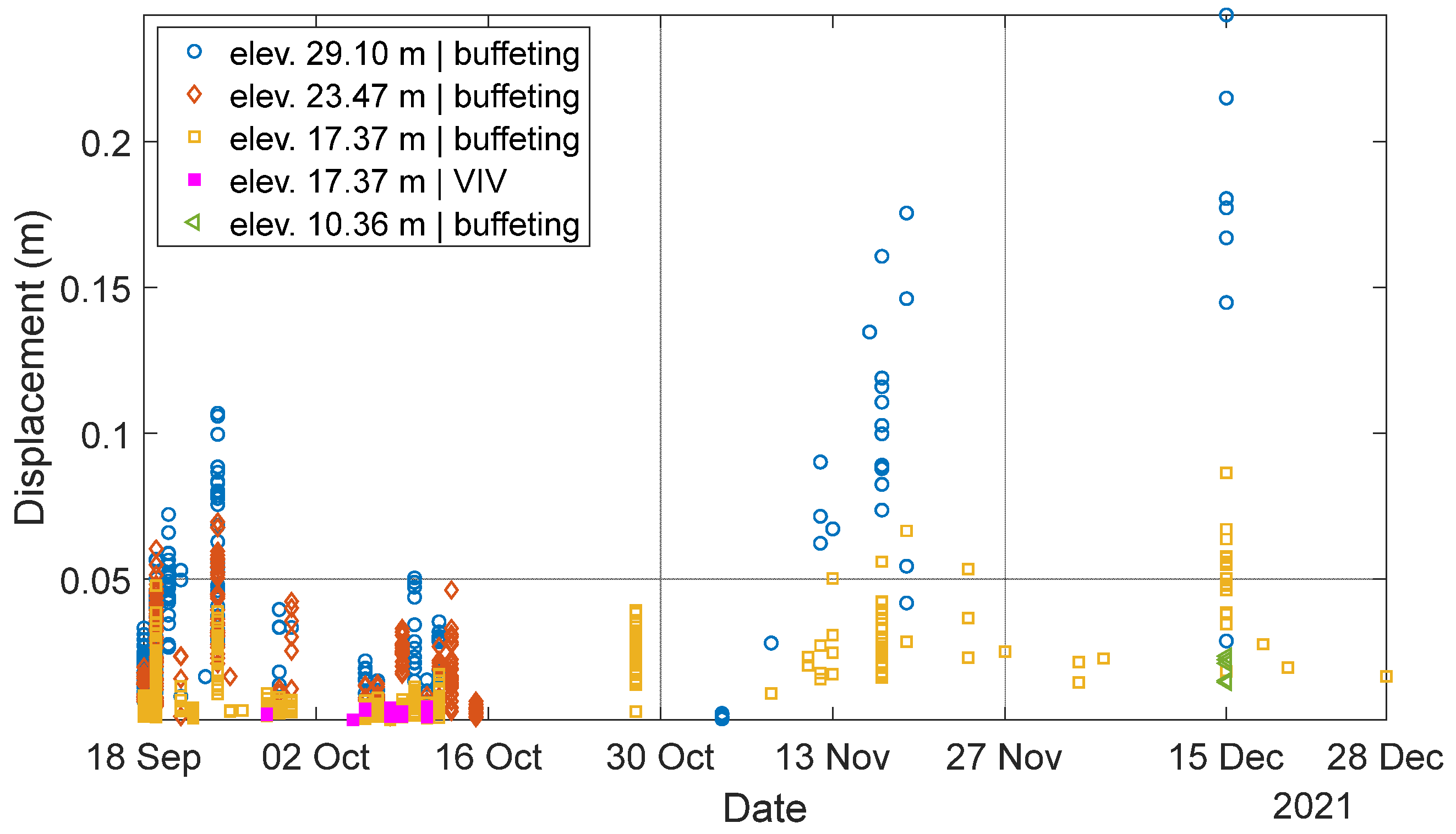
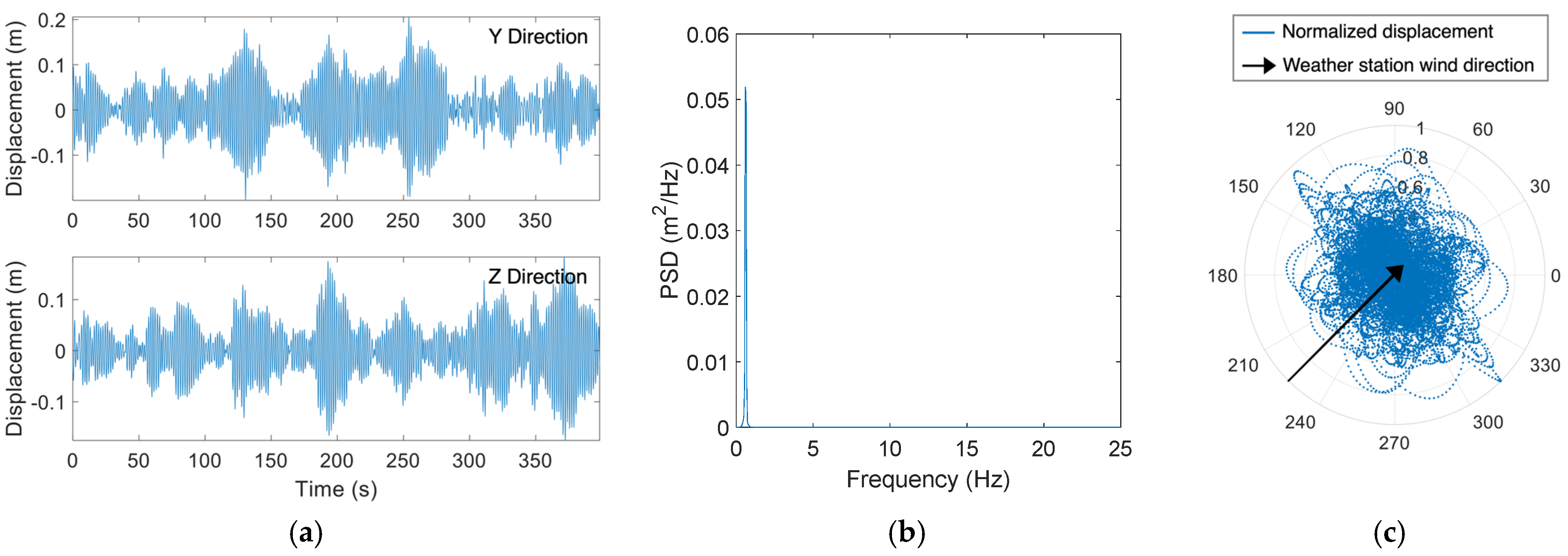
5.2.1. Vortex-Induced Vibration (VIV)
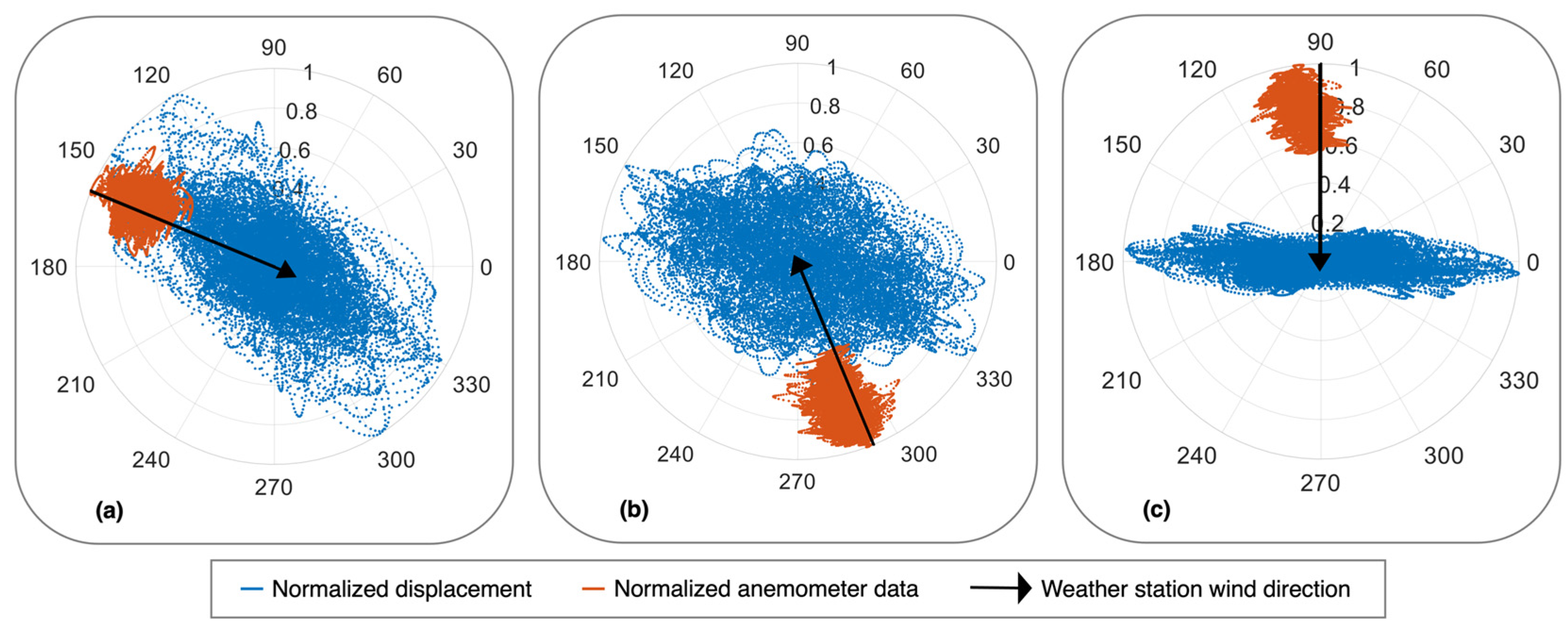
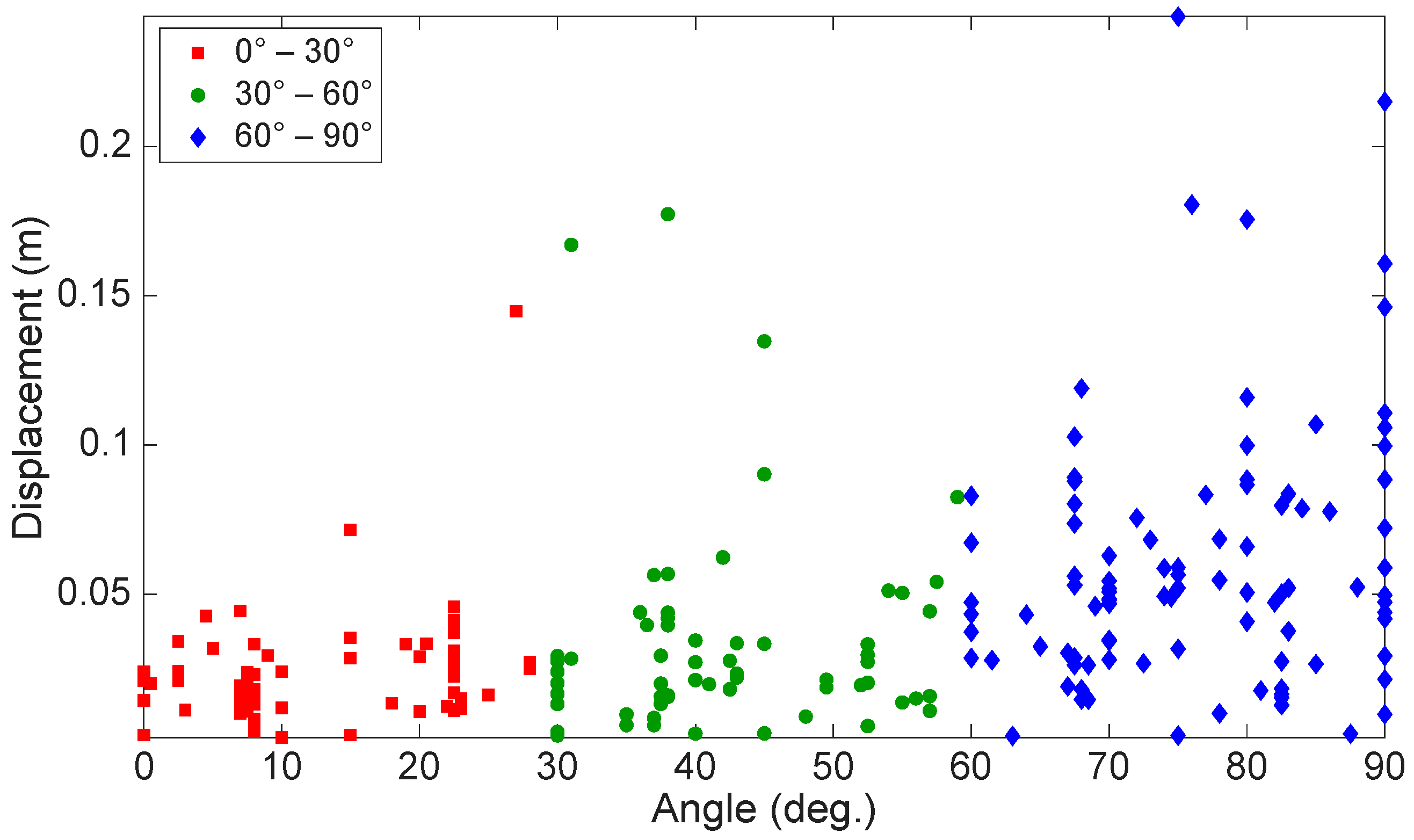
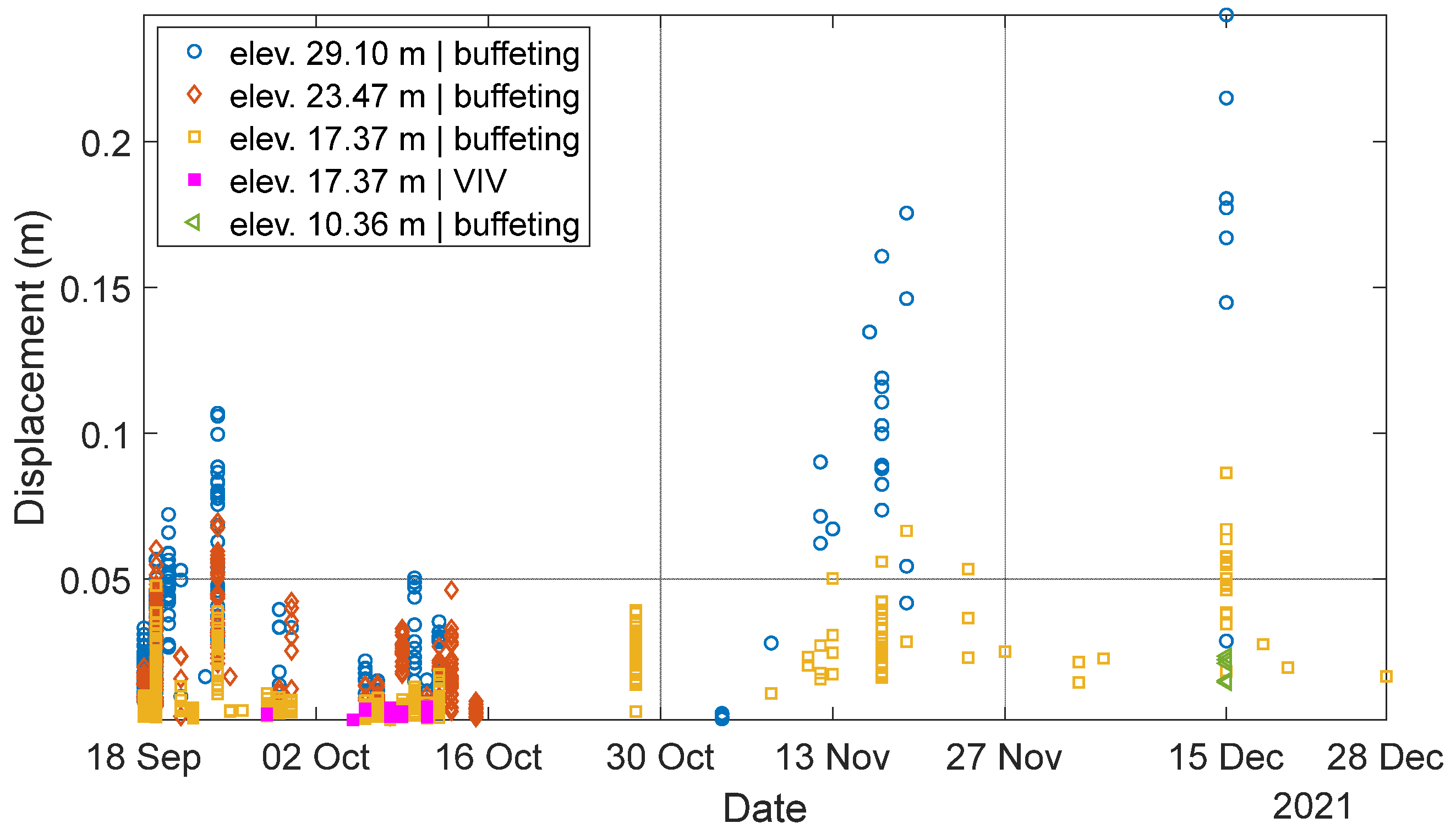
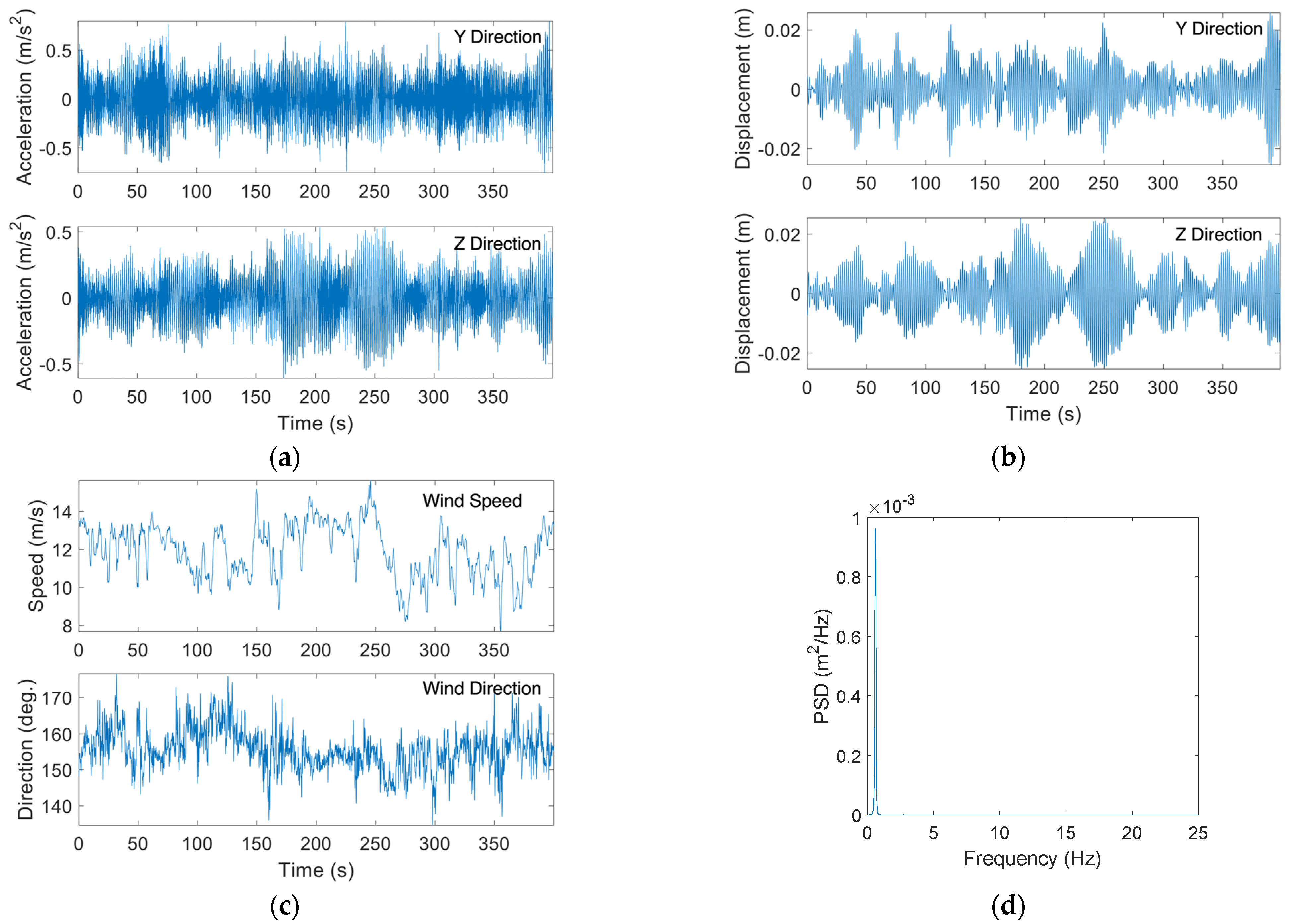
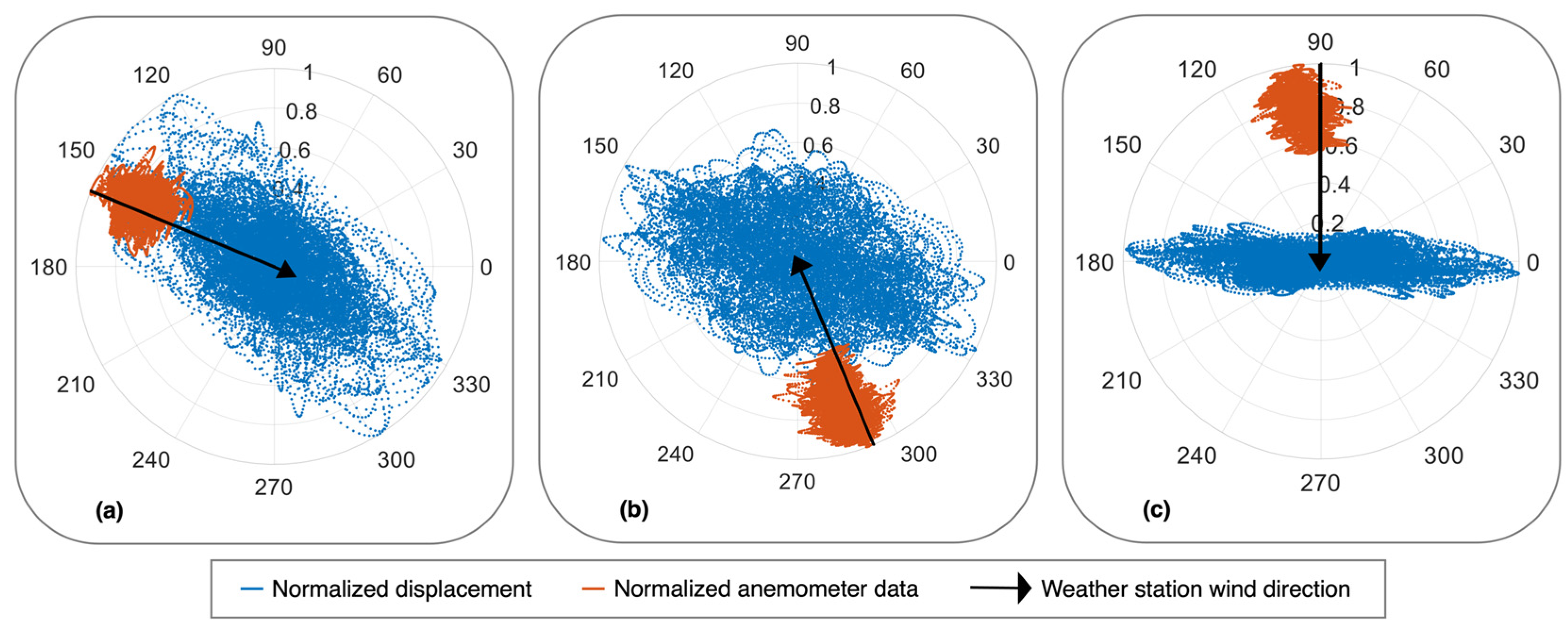
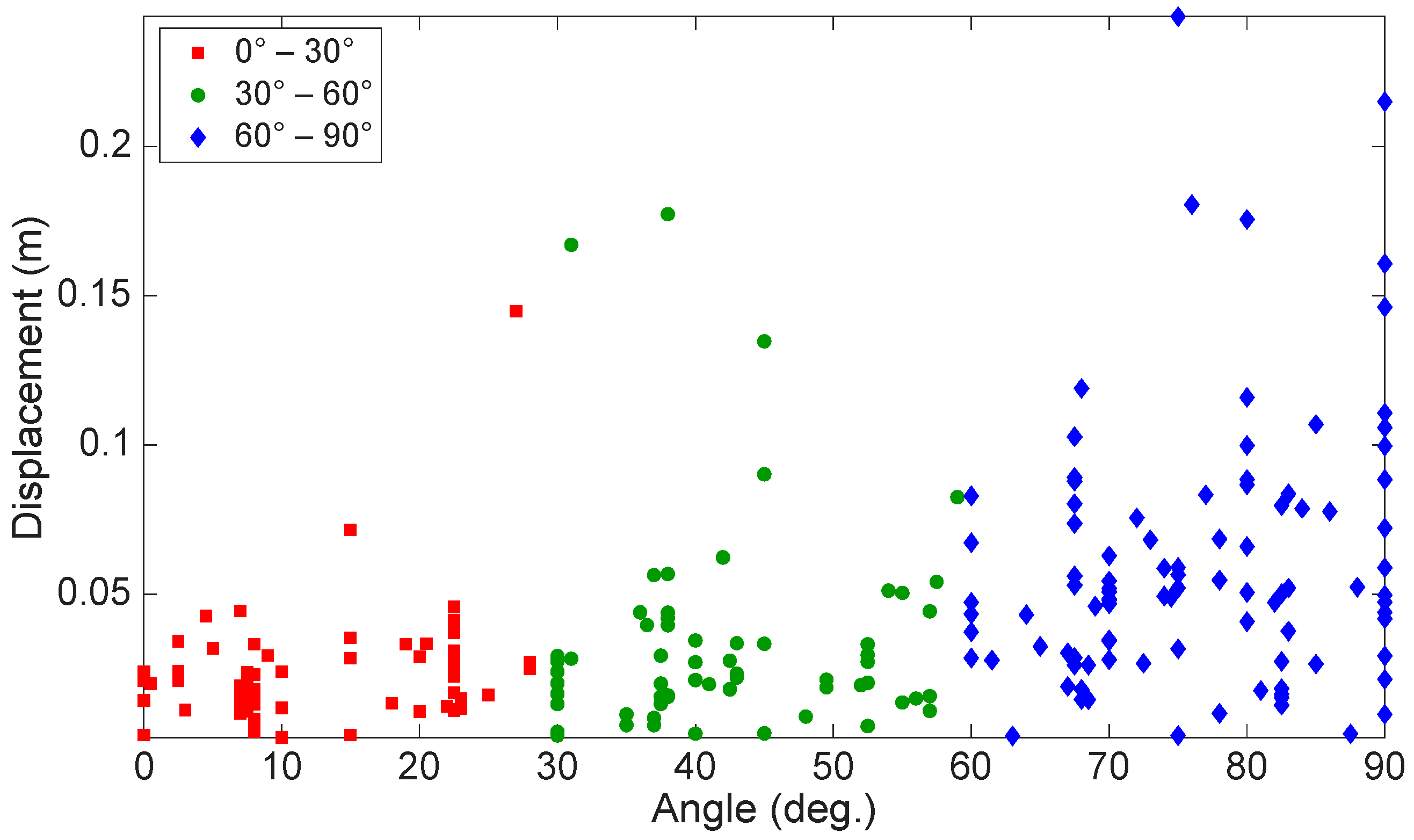
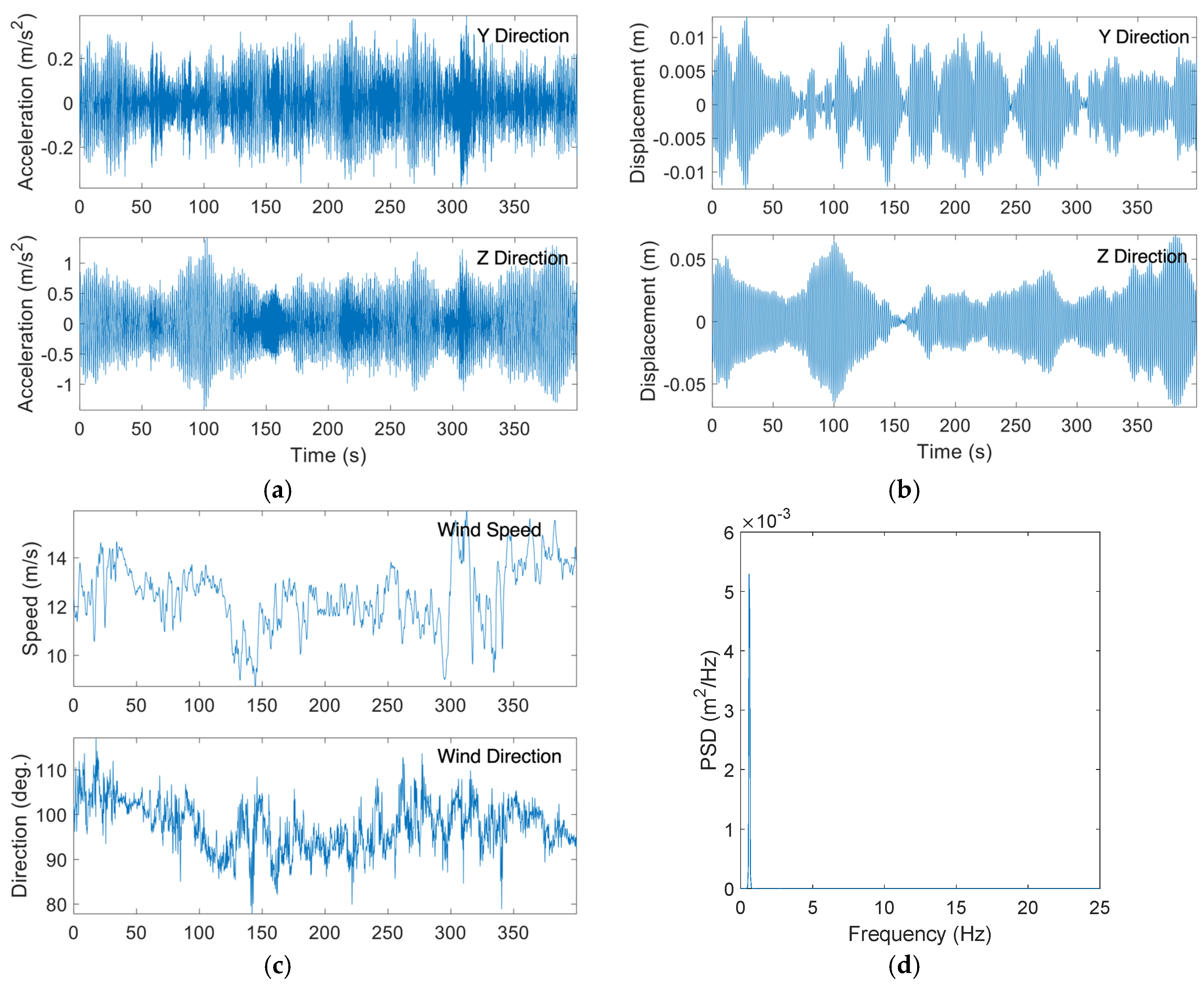
5.2.2. Buffeting
5.2.3. Summary of Data Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chang, B.; Phares, B.M.; Sarkar, P.P.; Wipf, T.J. Development of a procedure for fatigue design of slender support structures subjected to wind-induced vibration. Transp. Res. Rec. 2009, 2131, 23–33. [Google Scholar] [CrossRef]
- Wu, T.; Kareem, A. An overview of vortex-induced vibration (VIV) of bridge decks. Front. Struct. Civ. Eng. 2012, 6, 335–347. [Google Scholar] [CrossRef]
- Puckett, J.; Ahearn, E.B. Reduction of Wind-Induced Vibrations in High-Mast Light Poles; University of Wyoming: Laramie, WY, USA, 2010. [Google Scholar]
- Chen, W.; Zhang, Q.; Li, H.; Hu, H. An experimental investigation on vortex induced vibration of a flexible inclined cable under a shear flow. J. Fluids Struct. 2015, 54, 297–311. [Google Scholar] [CrossRef]
- Zuo, D.; Letchford, C.J. Investigation of Wind-Induced Highway Lighting Pole Vibration Using Full-Scale Measurement; Texas Tech University: Lubbock, TX, USA, 2008. [Google Scholar]
- Solari, G. Gust buffeting of slender structures and structural elements: Simplified formulas for design calculations and code provisions. J. Struct. Eng. 2018, 144, 04017185. [Google Scholar] [CrossRef]
- Phares, B.M.; Sarkar, P.P.; Wipf, T.J.; Chang, B. Development of Fatigue Design Procedures for Slender, Tapered Support Structures for Highway Signs, Luminaries, and Traffic Signals Subjected to Wind-Induced Excitation from Vortex Shedding and Buffeting; Institute for Transportation, Iowa State University: Ames, IA, USA, 2007. [Google Scholar]
- Chang, B. Aerodynamic Parameters on a Multisided Cylinder for Fatigue Design. In Wind Tunnels and Experimental Fluid Dynamics Researc; InTech eBooks; IntechOpen: London, UK, 2011; pp. 395–408. [Google Scholar]
- Caracoglia, L.; Jones, N.P. Numerical and experimental study of vibration mitigation for highway light poles. Eng. Struct. 2007, 29, 821–831. [Google Scholar] [CrossRef]
- Lloyd, J.B.; Connor, R.J.; Sherman, R.J. Field Testing and Long-Term Monitoring of Selected High-Mast Lighting Towers; Department of Transportation: Cheyenne, WY, USA, 2020.
- American Association of State Highway and Transportation Officials (AASHTO). Standard Specifications for Structural Supports for Highway Signs, Luminaires and Traffic Signals, 4th ed.; AASHTO: Washington, DC, USA, 2015. [Google Scholar]
- Tsai, L.W.; Alipour, A. Assessment of fatigue life and reliability of high-mast luminaire structures. J. Constr. Steel Res. 2020, 170, 106066. [Google Scholar] [CrossRef]
- Connor, R.; Hodgson, I. Field instrumentation and testing of high-mast lighting towers in the state of Iowa. In Draft Final Report; Iowa Department of Transportation Office of Bridges and Structures: Ames, IA, USA, 2006. [Google Scholar]
- Goode, J.S.; van de Lindt, J.W. Development of a semiprescriptive selection procedure for reliability-based fatigue design of high-mast lighting structural supports. J. Perform. Constr. Facil. 2007, 21, 193–206. [Google Scholar] [CrossRef]
- Foley, C.M. Structural Analysis of Sign Bridge Structures and Luminaire Supports; Wisconsin Highway Research Program: Madison, WI, USA, 2004.
- Yount, T.; Yu, D.; Bennett, C.; Collins, W.; Li, J. Investigation of High Mast Illumination Pole Handhole Cracking; [Technical Summary] (No. KS-24-02); Department of Transportation: Topeka, KS, USA, 2024.
- Almarshad, A. Structural Health Monitoring Strategies Using Traditional Sensors and Computer Vision, in Civil Engineering. Ph.D. Thesis, The University of Kansas, Lawrence, KS, USA, 2020. [Google Scholar]
- Fu, Y.; Hoang, T.A.; Mechitov, K.; Kim, J.R.; Zhang, D.; Spencer, B.F. Sudden Event Monitoring of Civil Infrastructure Using Demand-Based Wireless Smart Sensors. Sensors 2018, 18, 4480. [Google Scholar] [CrossRef] [PubMed]
- R. M. Young Company. Wind Monitor With Voltage Outputs Model 05103V: Instructions; R. M. Young Company: Traverse City, MI, USA, 2000. [Google Scholar]
- Barthelmie, R.J.; Wang, H.; Doubrawa, P.; Pryor, S. Best Practice for Measuring Wind Speeds and Turbulence Offshore through In-Situ and Remote Sensing Technologies; Cornell University: Ithaca, NY, USA, 2016. [Google Scholar]
- ABAQUS. ABAQUS/CAE 6.24 User’s Manual; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2021. [Google Scholar]
- Shaheen, M.; Li, J.; Taher, S.; Bennett, C.; Collins, W. Wind-induced vibration monitoring of high mast illumination poles. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2022, Long Beach, CA, USA, 6–10 March 2022; SPIE: Long Beach, CA, USA; pp. 228–236. [Google Scholar]
- Almarshad, A.; Li, J.; Lepage, A. Drift Estimation of Tall Building Structures under Non-stationary Wind Loading through Sensor Data Fusion. In Proceedings of the 9th International Conference on Structural Health Monitoring of Intelligent Infrastructure (ISHMII-9), St. Louis, MO, USA, 4–7 August 2019. [Google Scholar]
- Park, J.-W.; Sim, S.H.; Jung, H.-J. Displacement Estimation Using Multimetric Data Fusion. IEEE/ASME Trans. Mechatron. 2013, 18, 1675–1682. [Google Scholar] [CrossRef]
- Han, Y.; Zhou, X.; Wang, L.; Cai, C.; Yan, H.; Hu, P. Experimental investigation of the vortex-induced vibration of tapered light poles. J. Wind Eng. Ind. Aerodyn. 2021, 211, 104555. [Google Scholar] [CrossRef]
- Hays Regional Station. Hays, KS Weather History; Hays Regional Station: Hays, KS, USA, 2021. [Google Scholar]
- Simiu, E.; Scanlan, R.H. Wind Effects on Structures: Fundamentals and Applications to Design; John Wiley: New York, NY, USA, 1996; Volume 688. [Google Scholar]
- Junge, B.A. Computational Fluid Dynamics Investigation into High Mast Illumination Poles: Influence of Light Fixture Type; The University of Kansas: Lawrence, KS, USA, 2022. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bottom Diameter (m) | Top Diameter (m) | Length (m) | Thickness (cm) | |
|---|---|---|---|---|
| Section A | 0.65 | 0.47 | 15.48 | 0.64 |
| Section B | 0.49 | 0.30 | 16.06 | 0.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaheen, M.; Li, J.; Bennett, C.; Collins, W. Wind-Induced Vibration Monitoring of High-Mast Illumination Poles Using Wireless Smart Sensors. Sensors 2024, 24, 2506. https://doi.org/10.3390/s24082506
Shaheen M, Li J, Bennett C, Collins W. Wind-Induced Vibration Monitoring of High-Mast Illumination Poles Using Wireless Smart Sensors. Sensors. 2024; 24(8):2506. https://doi.org/10.3390/s24082506
Chicago/Turabian StyleShaheen, Mona, Jian Li, Caroline Bennett, and William Collins. 2024. "Wind-Induced Vibration Monitoring of High-Mast Illumination Poles Using Wireless Smart Sensors" Sensors 24, no. 8: 2506. https://doi.org/10.3390/s24082506
APA StyleShaheen, M., Li, J., Bennett, C., & Collins, W. (2024). Wind-Induced Vibration Monitoring of High-Mast Illumination Poles Using Wireless Smart Sensors. Sensors, 24(8), 2506. https://doi.org/10.3390/s24082506