



Kinematic Analysis of Free Vertical Split with 720° Turn in Elite Chinese Rhythmic Gymnastics


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
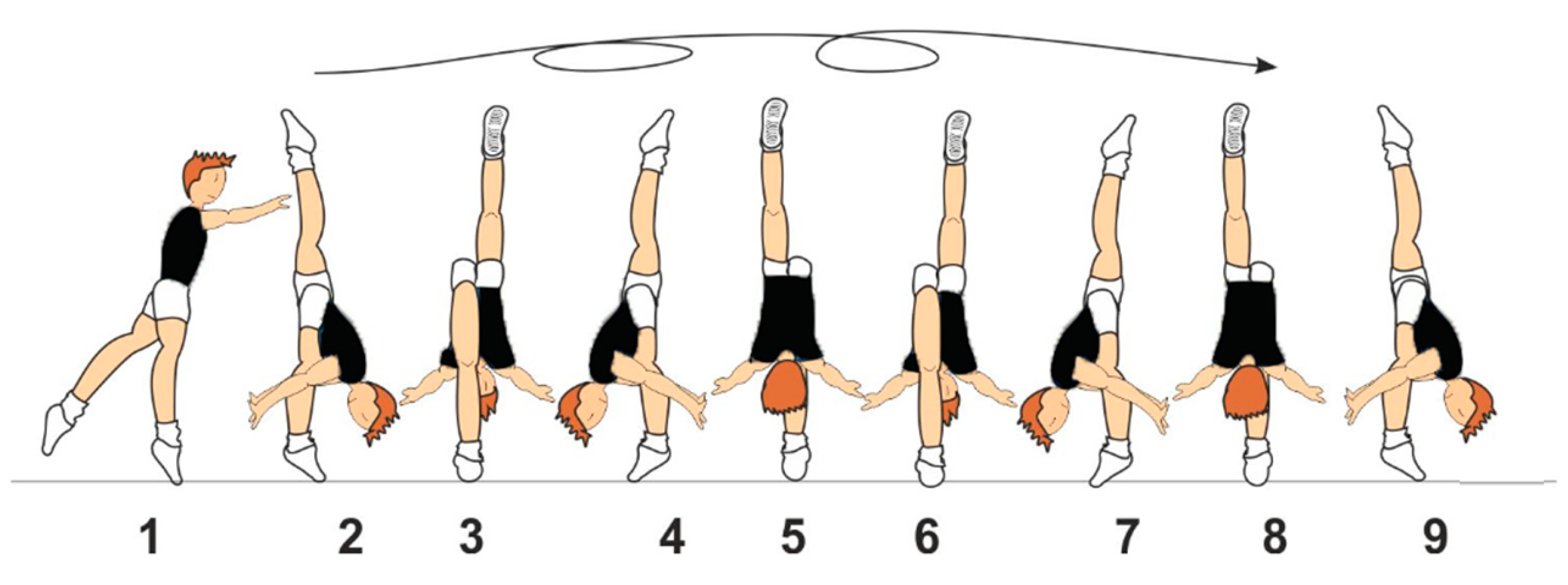
2.2. Specific Action Description
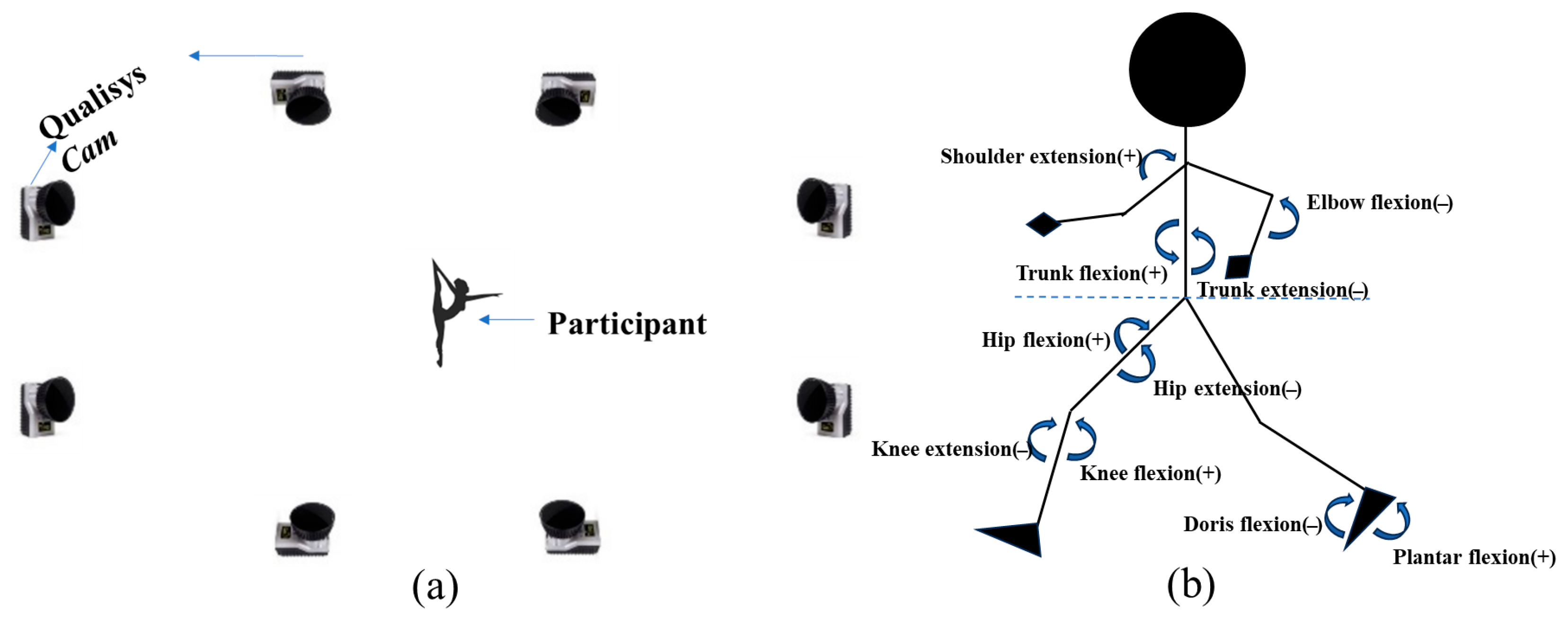
2.3. Apparatus and Procedures
2.4. Kinematics
2.5. Data Filtering and Pre-Processing
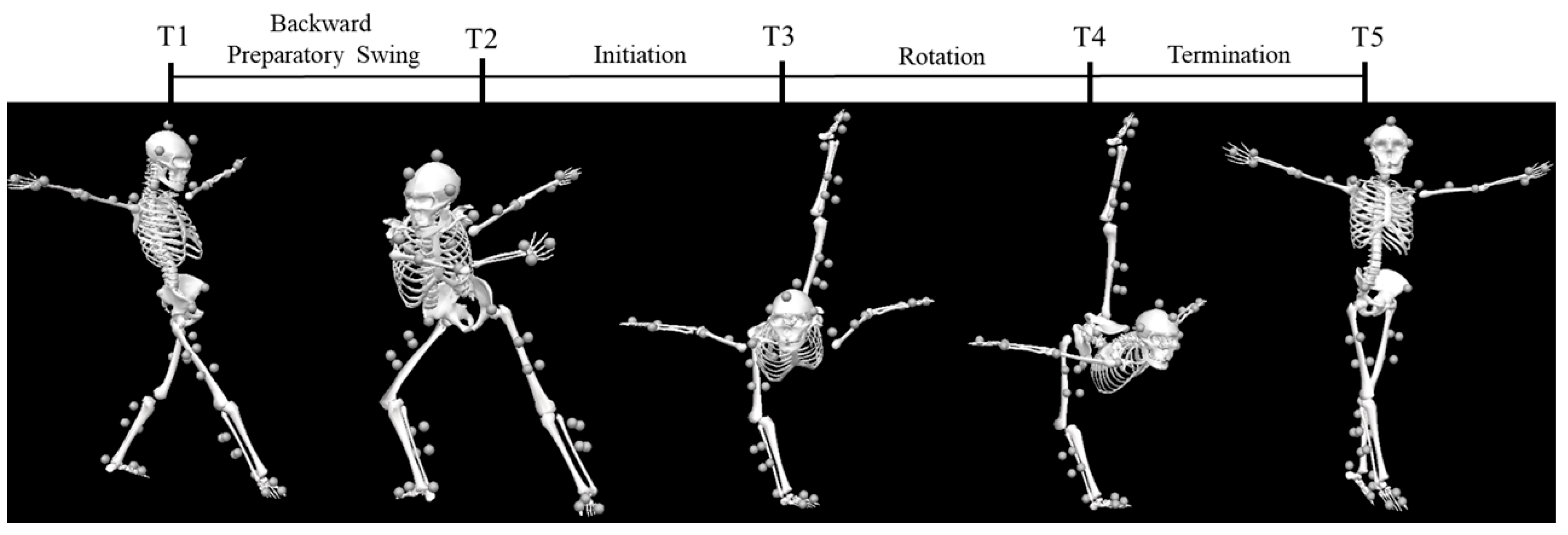
2.6. Movement Phase Definition
2.7. Statistical Analysis
3. Results
3.1. Temporal and Spatial Parameters of the Movement
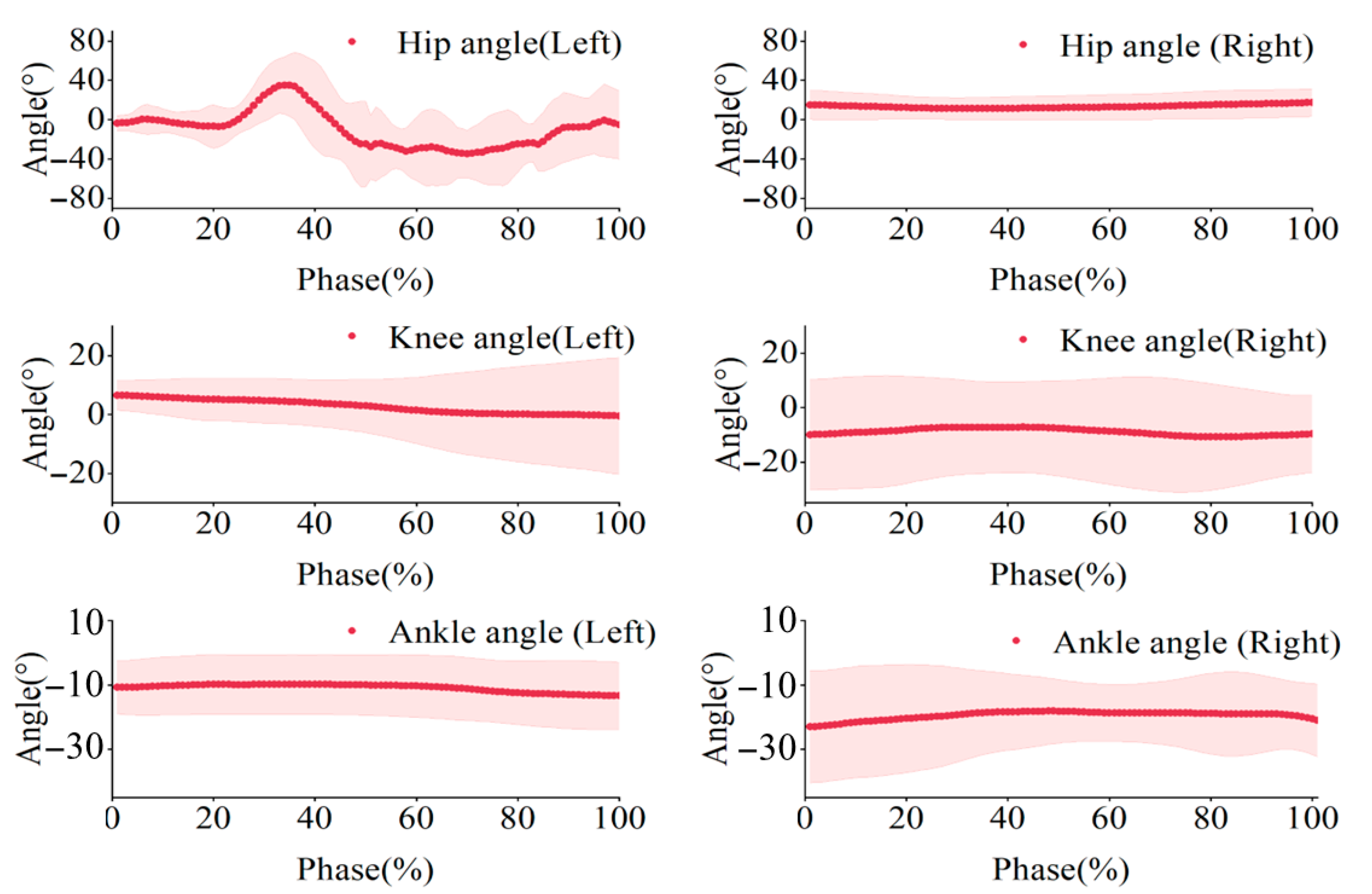
3.2. Joint Angle Characteristics at Characteristic Moments
3.3. Moving Trajectories of the COM in Different Stages
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Flessas, K.; Mylonas, D.; Panagiotaropoulou, G.; Tsopani, D.; Korda, A.; Siettos, C.; Di Cagno, A.; Evdokimidis, I.; Smyrnis, N. Judging the Judges’ Performance in Rhythmic Gymnastics. Med. Sci. Sports Exerc. 2015, 47, 640–648. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, M.S.; Stella Silva De Souza, A.; Ramires Costa, A.; Nunomura, M. The Balance Beam as an Artistic Gymnastics Apparatus for Women: From the Origin to Its Consolidation. Sci. Gymnast. J. 2023, 15, 269–284. [Google Scholar] [CrossRef]
- Kirialanis, P.; Malliou, P.; Beneka, A.; Giannakopoulos, K. Occurrence of Acute Lower Limb Injuries in Artistic Gymnasts in Relation to Event and Exercise Phase. Br. J. Sports Med. 2003, 37, 137–139. [Google Scholar] [CrossRef] [PubMed]
- Tatlibal, P. Sports Injuries, Types and Causes in Turkish Elite Artistic Gymnasts. Sci. Chron. 2023, 28, 139–150. [Google Scholar]
- Sastre-Munar, A.; Pades-Jimenez, A.; Garcia-Coll, N.; Molina-Mula, J.; Romero-Franco, N. Injuries, Pain, and Catastrophizing Level in Gymnasts: A Retrospective Analysis of a Cohort of Spanish Athletes. Healthcare 2022, 10, 890. [Google Scholar] [CrossRef]
- Farana, R.; Williams, G.; Fujihara, T.; Wyatt, H.E.; Naundorf, F.; Irwin, G. Current Issues and Future Directions in Gymnastics Research: Biomechanics, Motor Control and Coaching Interface. Sports Biomech. 2023, 22, 161–185. [Google Scholar] [CrossRef]
- Yeadon, M.R.; Hiley, M.J. Twist Limits for Late Twisting Double Somersaults on Trampoline. J. Biomech. 2017, 58, 174–178. [Google Scholar] [CrossRef]
- Mizutori, H.; Kashiwagi, Y.; Hakamada, N.; Tachibana, Y.; Funato, K. Kinematics and Joints Moments Profile during Straight Arm Press to Handstand in Male Gymnasts. PLoS ONE 2021, 16, e0253951. [Google Scholar] [CrossRef]
- Penitente, G.; Sands, W.A. Exploratory Investigation of Impact Loads During the Forward Handspring Vault. J. Hum. Kinet. 2015, 46, 59–68. [Google Scholar] [CrossRef]
- Kyselovicova, O.; Selecka, L.; Krnacova, A.; Lamosova, A. Biomechanical Characteristics of Stag Leap with Back Bend of the Trunk: A Case Study. Sci. Gymnast. J. 2020, 12, 243–253. [Google Scholar] [CrossRef]
- Rutkowska-Kucharska, A.; Szpala, A.; Jaroszczuk, S.; Sobera, M. Muscle Coactivation during Stability Exercises in Rhythmic Gymnastics: A Two-Case Study. Appl. Bionics Biomech. 2018, 2018, 8260402. [Google Scholar] [CrossRef] [PubMed]
- Petrella, M.; Selistre, L.F.A.; Serrão, P.R.M.S.; Lessi, G.C.; Gonçalves, G.H.; Mattiello, S.M. Kinetics, Kinematics, and Knee Muscle Activation during Sit to Stand Transition in Unilateral and Bilateral Knee Osteoarthritis. Gait Posture 2021, 86, 38–44. [Google Scholar] [CrossRef] [PubMed]
- de Almeida, P.H.T.Q.; MacDermid, J.C.; dos Santos Couto Paz, C.C.; da Mota, L.M.H.; Matheus, J.P.C. The Immediate Effect of Thumb Orthoses on Upper Extremity’s Movement: A Kinematic Analysis of Five Unique Devices. Gait Posture 2020, 82, 209–216. [Google Scholar] [CrossRef]
- Color Atlas of Skeletal Landmark Definitions. Guidelines for Reproducible Manual and Virtual Palpations. | Semantic Scholar. Available online: https://www.semanticscholar.org/paper/Color-Atlas-of-Skeletal-landmark-definitions.-for-Jan/15b80c3b90898656b0bea7adee182afa9d5f00a7 (accessed on 7 January 2025).
- Lu, Z.; Mao, C.; Tan, Y.; Liu, T.; Li, X.; Li, Z.; Zhu, W.; Sun, Y. The Impact of Backpack Load on Adolescent’s Stair Descent Gait. J. Biomech. 2024, 166, 112029. [Google Scholar] [CrossRef]
- Sun, Y.; Wei, S.; Zhong, Y.; Fu, W.; Li, L.; Liu, Y. How Joint Torques Affect Hamstring Injury Risk in Sprinting Swing-Stance Transition. Med. Sci. Sports Exerc. 2015, 47, 373–380. [Google Scholar] [CrossRef]
- Gram, M.C.D.; Fagerland, M.W.; Bø, K. Efficacy of a Rhythmic Gymnastics-Specific Injury Prevention Program: An Assessor-Blinded Cluster-Randomized Controlled Trial. Scand. J. Med. Sci. Sports 2025, 35, e70022. [Google Scholar] [CrossRef]
- Gram, M.C.D.; Clarsen, B.; Bø, K. Injuries and Illnesses among Competitive Norwegian Rhythmic Gymnasts during Preseason: A Prospective Cohort Study of Prevalence, Incidence and Risk Factors. Br. J. Sports Med. 2021, 55, 231–236. [Google Scholar] [CrossRef]
- Lin, C.-F.; Gross, M.T.; Weinhold, P. Ankle Syndesmosis Injuries: Anatomy, Biomechanics, Mechanism of Injury, and Clinical Guidelines for Diagnosis and Intervention. J. Orthop. Sports Phys. 2006, 36, 372–384. [Google Scholar] [CrossRef]
- Morgan, P.M.; LaPrade, R.F.; Wentorf, F.A.; Cook, J.W.; Bianco, A. The Role of the Oblique Popliteal Ligament and Other Structures in Preventing Knee Hyperextension. Am. J. Sports Med. 2010, 38, 550–557. [Google Scholar] [CrossRef]
- Senatore, B.; Valentini, M.; Federici, A.; Morsanuto, S.; D’Elia, F. Rhythmic Gymnastics and Dyslexia. J. Hum. Sports Exerc. 2019, 14, S664–S669. [Google Scholar] [CrossRef]
- Frutuoso, A.S.; Diefenthaeler, F.; Vaz, M.A.; Freitas, C. de la R. Lower Limb Asymmetries in Rhythmic Gymnastics Athletes. Int. J. Sports Phys. Ther. 2016, 11, 34–43. [Google Scholar] [PubMed]
- Purenović-Ivanović, T.; Roška, N.; Sterkowicz-Przybycień, K.; Moskovljević, L.; Jovanović, S. The Balance Ability of Top-Level Female Rhythmic Gymnasts: Does It Predict Their Performance Scores? TEME 2023, 3, 491–505. [Google Scholar] [CrossRef]
- Relationship Between Hip External Rotation and Turnout Angle for the Five Classical Ballet Positions (Topic)—1—All Databases. Available online: https://webofscience.clarivate.cn/wos/alldb/summary/7197fece-65e4-4f70-99d7-6ce53b7b0d13-01050184d3/relevance/1 (accessed on 31 August 2024).
- Song, T. Biomechanical Mechanisms and Prevention Strategies of Knee Joint Injuries on Football: An in-Depth Analysis Based on Athletes’ Movement Patterns. MCB 2024, 21, 524. [Google Scholar] [CrossRef]
- Biomechanics and Motor Control of Human Movement | Wiley Online Books. Available online: https://onlinelibrary.wiley.com/doi/book/10.1002/9780470549148 (accessed on 4 September 2024).
- Prassas, S.; Kwon, Y.; Sands, W.A. Biomechanical Research in Artistic Gymnastics: A Review. Sports Biomech. 2006, 5, 261–291. [Google Scholar] [CrossRef]
- The Application of Cross and Supplemental Training in Dance-All Databases. Available online: https://webofscience.clarivate.cn/wos/alldb/full-record/PQDT:63800816 (accessed on 7 September 2024).
- Kim, J.; Wilson, M.A.; Singhal, K.; Gamblin, S.; Suh, C.-Y.; Kwon, Y.-H. Generation of Vertical Angular Momentum in Single, Double, and Triple-Turn Pirouette En Dehors in Ballet. Sports Biomech. 2014, 13, 215–229. [Google Scholar] [CrossRef]
- Belsky, L.C. Physics and the Art of Dance: Understanding Movement. Med. Probl. Perform. Artists 2002, 17, 145. [Google Scholar]
- Lieberman, D.E.; Raichlen, D.A.; Pontzer, H.; Bramble, D.M.; Cutright-Smith, E. The Human Gluteus Maximus and Its Role in Running. J. Exp. Biol. 2006, 209, 2143–2155. [Google Scholar] [CrossRef]
- Fast Voluntary Trunk FLexion Movements in Standing: Primary Movements and Associated Postural Adjustments (Topic)—6—All Databases. Available online: https://webofscience.clarivate.cn/wos/alldb/summary/7f377541-02c2-4796-bd0b-39b7421f30e2-010679f04d/relevance/1 (accessed on 7 September 2024).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Backward Preparatory Swing Phase (T1–T2) | Initiation Phase (T2–T3) | Rotation Phase (T3–T4) | Termination Phase (T4–T5) | Total | |
|---|---|---|---|---|---|
| Subject1 | 1.99 | 1.15 | 2.27 | 0.92 | 6.33 |
| Subject2 | 1.03 | 1.08 | 2.29 | 0.95 | 5.35 |
| Subject3 | 1.70 | 0.92 | 2.34 | 1.08 | 6.04 |
| Subject4 | 0.67 | 1.00 | 3.65 | 1.03 | 6.35 |
| Subject5 | 0.75 | 1.15 | 2.71 | 0.72 | 5.33 |
| Subject6 | 0.76 | 1.04 | 3.36 | 1.09 | 6.25 |
| Subject7 | 1.22 | 0.86 | 3.62 | 1.10 | 6.8 |
| Subject8 | 1.23 | 0.87 | 3.25 | 1.01 | 6.36 |
| Hip | Knee | Ankle | ||||
|---|---|---|---|---|---|---|
| X-Axis | Y-Axis | X-Axis | Y-Axis | X-Axis | Y-Axis | |
| T1 | −15.1 ± 9.8 | −1.4 ± 3.6 | 4.7 ± 4.6 | 2.2 ± 3.9 | 83.3 ± 10.4 | 12.5 ± 7.4 |
| T2 | 54.0 ± 11.8 | 18.0 ± 3.7 | 14.1 ± 4.0 | 5.8 ± 4.3 | 58.9 ± 4.2 | 9.1 ± 5.1 |
| T3 | −47.0 ± 12.6 | 36.1 ± 6.8 | −4.7 ± 5.9 | 5.2 ± 3.9 | 25.9 ± 7.6 | 2.0 ± 5.4 |
| T4 | −47.4 ± 13.2 | 36.6 ± 7.2 | −3.2 ± 8.0 | 4.5 ± 3.2 | 25.9 ± 7.4 | 1.8 ± 4.8 |
| T5 | 15.5 ± 17.3 | −2.3 ± 6.7 | 4.8 ± 5.8 | 3.4 ± 3.1 | 48.1 ± 17.1 | 6.8 ± 8.0 |
| Hip | Knee | Ankle | ||||
|---|---|---|---|---|---|---|
| X-Axis | Y-Axis | X-Axis | Y-Axis | X-Axis | Y-Axis | |
| T1 | 46.0 ± 9.1 | −8.6 ± 6.4 | −18.0 ± 6.1 | 1.8 ± 4.3 | 51.1 ± 13.2 | −11.6 ± 8.7 |
| T2 | 81.6 ± 11.7 | −34.9 ± 11.1 | −49.8 ± 8.9 | 14.5 ± 8.2 | 88.7 ± 8.1 | −12.0 ± 11.2 |
| T3 | 104.3 ± 16.5 | −36.5 ± 8.2 | 22.4 ± 5.5 | −6.6 ± 4.1 | 53.9 ± 6.2 | −4.4 ± 5.7 |
| T4 | 116.8 ± 21.7 | −37.3 ± 6.2 | 24.8 ± 7.5 | −8.2 ± 4.0 | 58.1 ± 6.2 | −9.5 ± 5.6 |
| T5 | 8.6 ± 12.1 | −3.31 ± 3.1 | 4.6 ± 8.7 | −3.9 ± 4.9 | 46.7 ± 8.1 | −3.3 ± 6.0 |
| Shoulder | Elbow | Wrist | ||||
|---|---|---|---|---|---|---|
| X-Axis | Y-Axis | X-Axis | Y-Axis | X-Axis | Y-Axis | |
| T1 | 5.4 ± 4.4 | 69.4 ± 11.5 | 7.6 ± 9.1 | 7.1 ± 6.6 | −2.0 ± 12.3 | −13.0 ± 13.6 |
| T2 | −73.8 ± 4.3 | 54.8 ± 16.9 | 6.2 ± 6.0 | 5.8 ± 6.5 | 2.3 ± 9.4 | −3.0 ± 12.2 |
| T3 | −34.5 ± 11.0 | 59.0 ± 8.4 | 2.8 ± 9.4 | 4.5 ± 11.6 | −8.3 ± 12.1 | −5.6 ± 9.9 |
| T4 | −30.7 ± 9.6 | 45.5 ± 21.2 | 3.6 ± 5.4 | 5.0 ± 9.3 | −1.6 ± 12.0 | −3.1 ± 12.9 |
| T5 | 6.8 ± 5.9 | 51.7 ± 20.0 | 8.0 ± 12.3 | 8.0 ± 10.2 | −9.8 ± 10.7 | −5.0 ± 11.3 |
| Shoulder | Elbow | Wrist | ||||
|---|---|---|---|---|---|---|
| X-Axis | Y-Axis | X-Axis | Y-Axis | X-Axis | Y-Axis | |
| T1 | 8.1 ± 14.9 | −68.6 ± 10.2 | −3.6 ± 8.4 | −6.3 ± 9.6 | 12.2 ± 12.1 | 3.4 ± 9.3 |
| T2 | 93.1 ± 18.9 | 29.7 ± 10.0 | 82.4 ± 22.2 | −1.2 ± 5.6 | 4.9 ± 12.7 | −0.4 ± 11.4 |
| T3 | −32.5 ± 12.8 | −41.0 ± 27.5 | 1.8 ± 14.6 | −6.8 ± 10.2 | 0.9 ± 15.4 | 1.1 ± 10.7 |
| T4 | −35.2 ± 8.4 | −30.3 ± 21.0 | 3.2 ± 10.4 | −8.2 ± 12.7 | 5.1 ± 16.8 | −1.5 ± 12.2 |
| T5 | 6.4 ± 14.9 | −41.2 ± 26.5 | 7.3 ± 8.8 | 5.6 ± 9.2 | 3.9 ± 21.7 | −3.0 ± 14.0 |
| T1 | T2 | T3 | T4 | T5 | |
|---|---|---|---|---|---|
| Left hip joint torsion angle | −8.8 ± 7.0 | 23.9 ± 5.9 | 28.3 ± 4.3 | 28.5 ± 8.2 | −3.2 ± 5.0 |
| Right hip joint torsion angle | 20.1 ± 6.2 | 32.3 ± 4.0 | −4.7 ± 2.0 | 18.3 ± 13.7 | −4.5 ± 3.4 |
| Left tibial torsion angle | 0.7 ± 25.1 | −3.6 ± 8.7 | −0.6 ± 8.5 | −3.9 ± 2.7 | −13.7 ± 7.1 |
| Right tibial torsion angle | 11.7 ± 2.8 | 35.7 ± 1.5 | 3.3 ± 5.0 | 3.7 ± 5.2 | −7.3 ± 6.8 |
| Trunk torsion angle | −12.0 ± 8.2 | 37.2 ± 4.5 | −16.6 ± 7.5 | −1.6 ± 4.9 | −7.3 ± 6.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Wang, L.; Gao, L.; Sun, Y. Kinematic Analysis of Free Vertical Split with 720° Turn in Elite Chinese Rhythmic Gymnastics. Sensors 2025, 25, 2667. https://doi.org/10.3390/s25092667
Liu T, Wang L, Gao L, Sun Y. Kinematic Analysis of Free Vertical Split with 720° Turn in Elite Chinese Rhythmic Gymnastics. Sensors. 2025; 25(9):2667. https://doi.org/10.3390/s25092667
Chicago/Turabian StyleLiu, Tao, Liangsen Wang, Liquan Gao, and Yuliang Sun. 2025. "Kinematic Analysis of Free Vertical Split with 720° Turn in Elite Chinese Rhythmic Gymnastics" Sensors 25, no. 9: 2667. https://doi.org/10.3390/s25092667
APA StyleLiu, T., Wang, L., Gao, L., & Sun, Y. (2025). Kinematic Analysis of Free Vertical Split with 720° Turn in Elite Chinese Rhythmic Gymnastics. Sensors, 25(9), 2667. https://doi.org/10.3390/s25092667