
The Aboveground Biomass Estimation of the Grain for Green Program Stands Using UAV-LiDAR and Sentinel-2 Data

Abstract
:1. Introduction
2. Materials
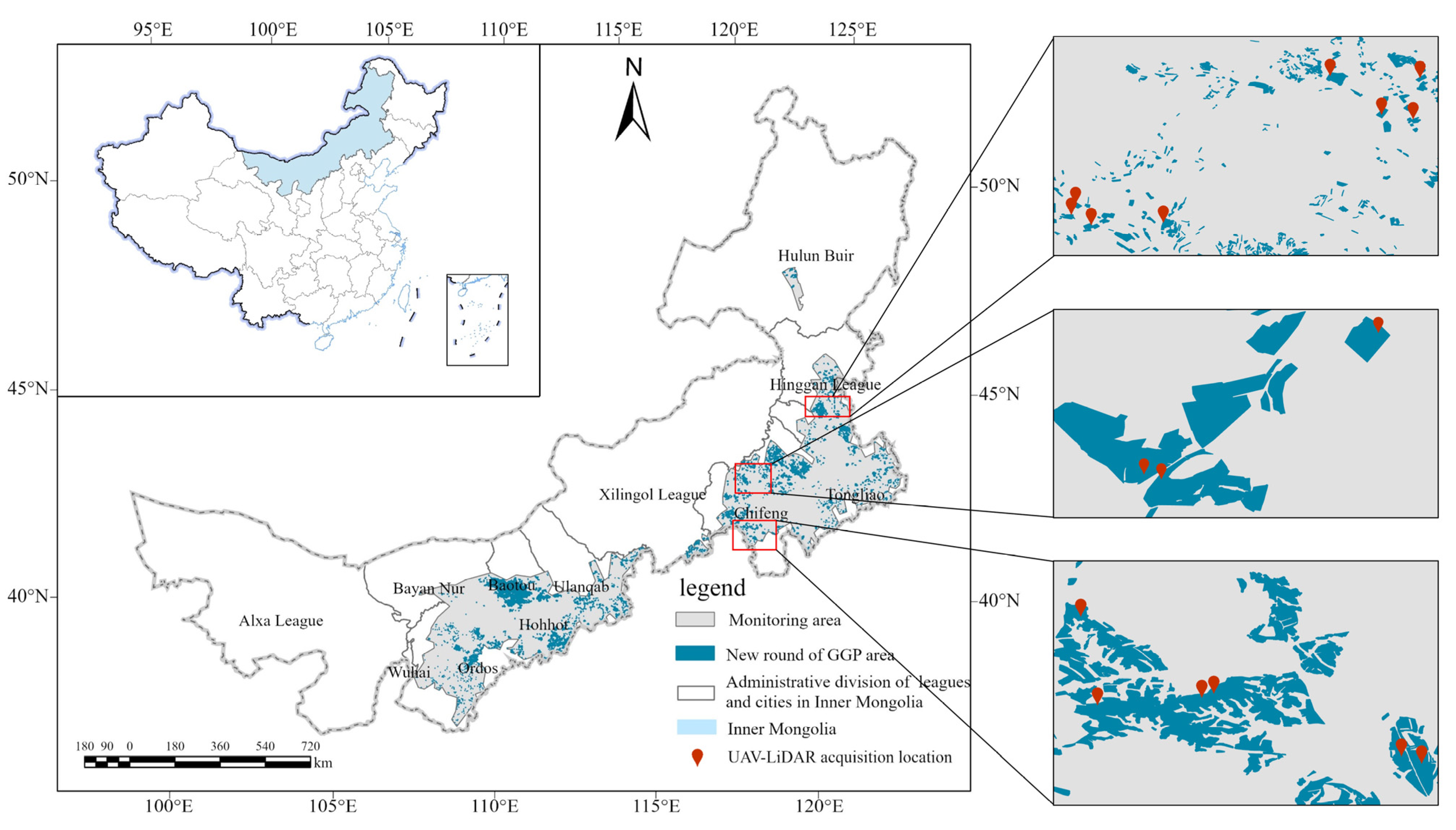
2.1. Study Area
2.2. Data Acquisition and Preprocessing
2.2.1. Sentinel-2 Data
2.2.2. UAV-LiDAR Data
2.2.3. Field Survey Data
2.2.4. SRTM DEM Data
2.2.5. The GGP Stands Distribution Data
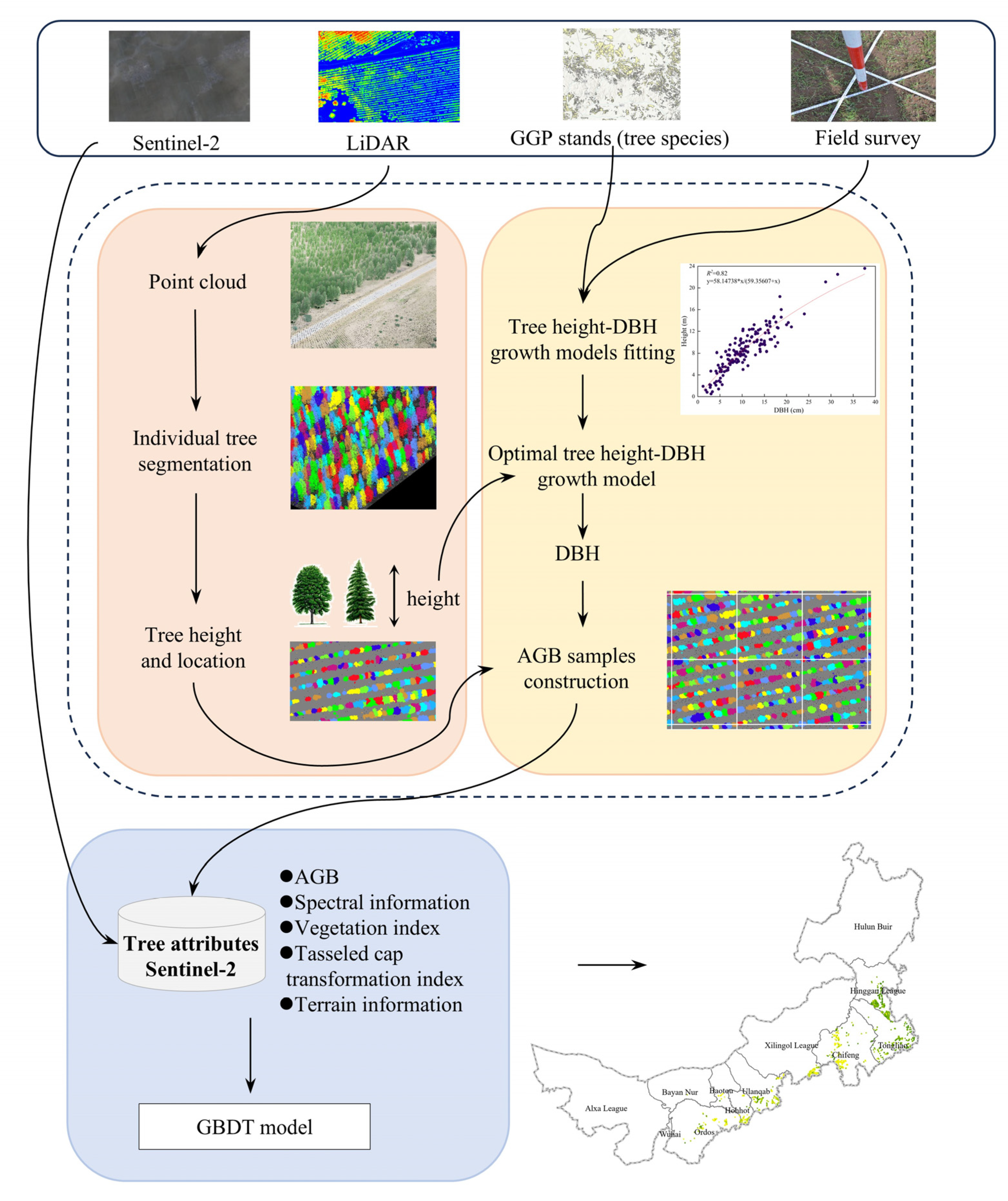
3. Methods
3.1. Construction of AGB Samples Based on LiDAR Data
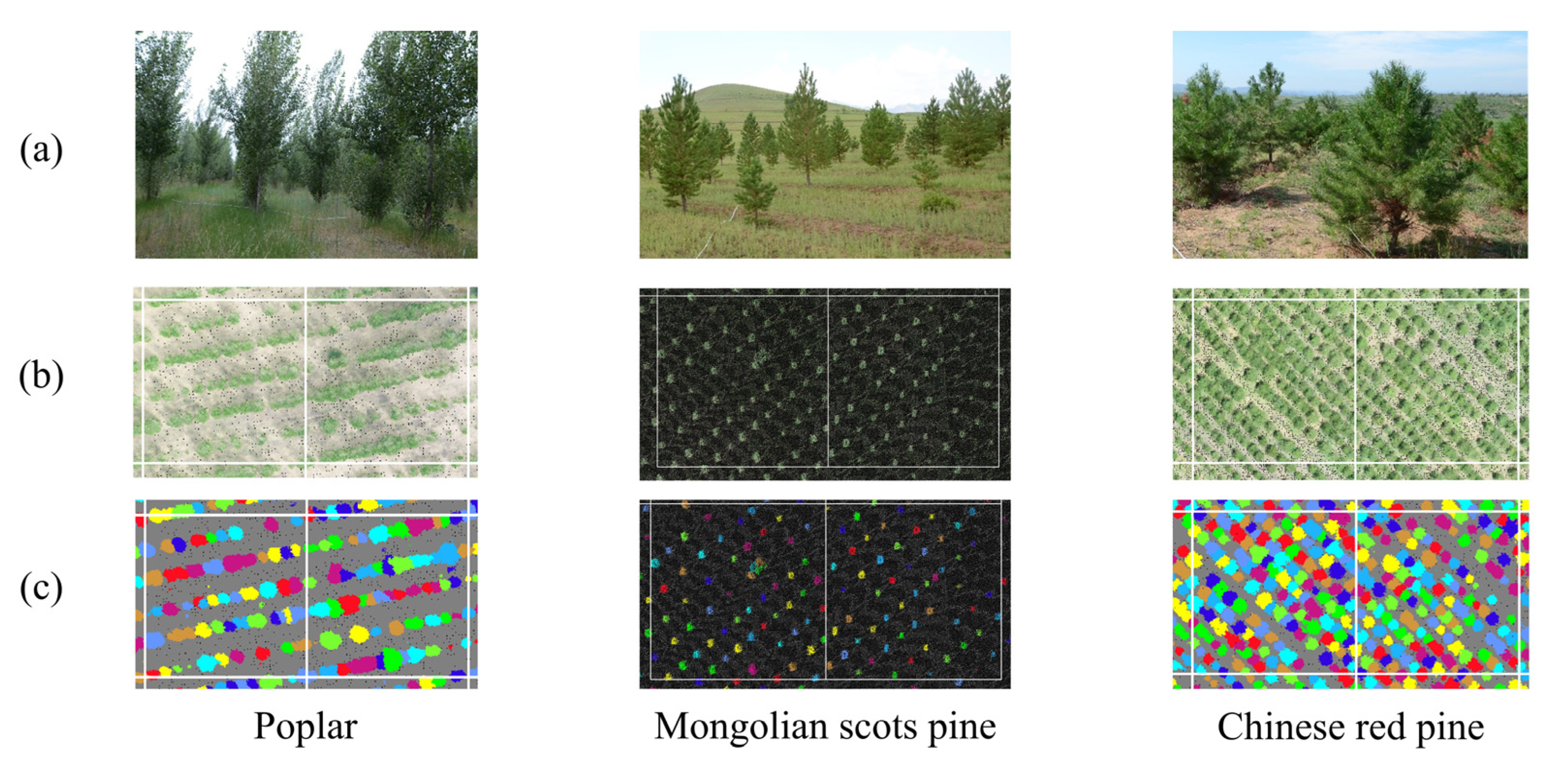
3.1.1. Individual Tree Segmentation
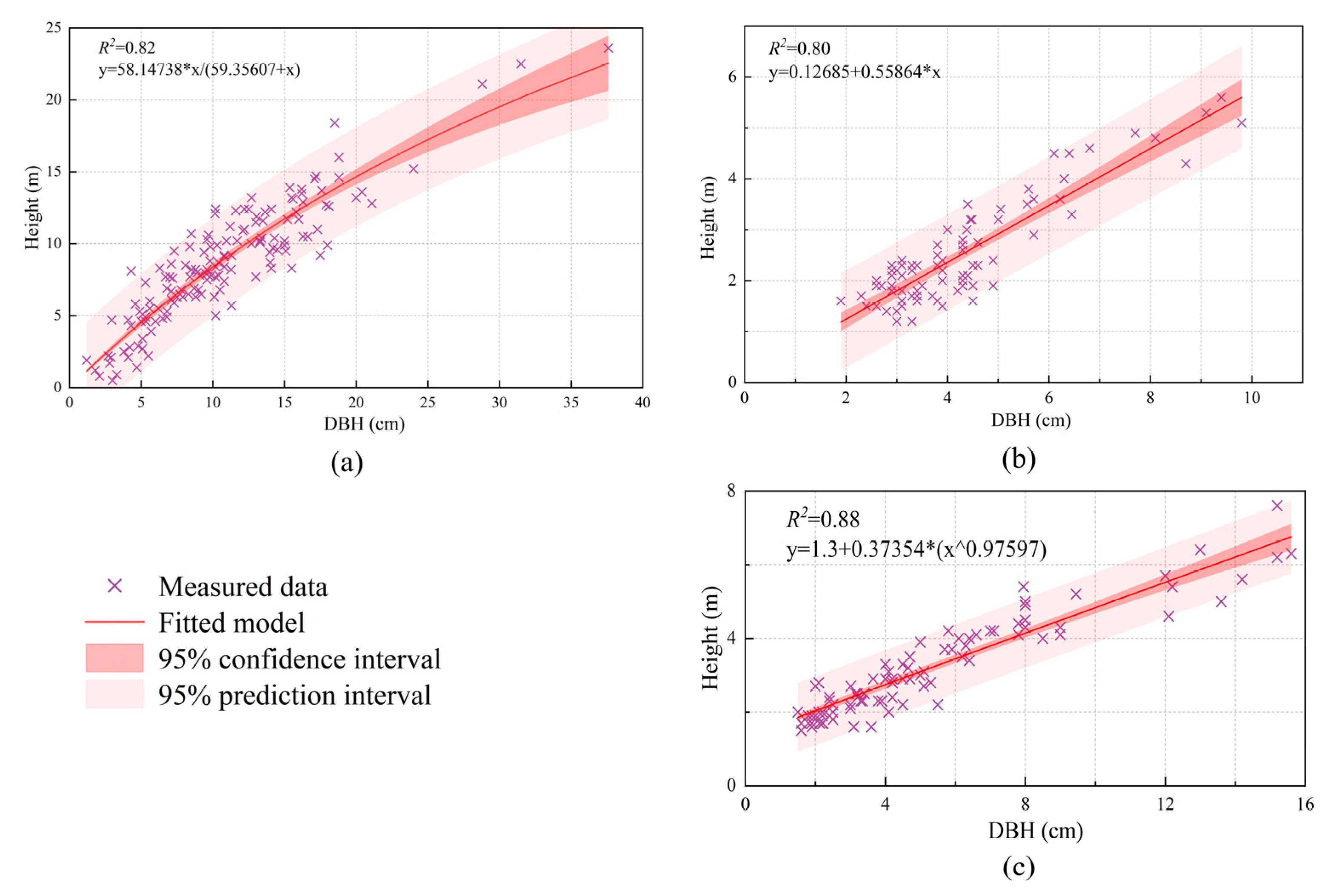
3.1.2. DBH Acquisition
3.1.3. Construction of AGB Samples
3.2. Extracting Key Variables for AGB Estimation
3.3. GBDT Model for Inverting AGB
3.4. Accuracy Evaluation
4. Results
4.1. DBH Acquisition
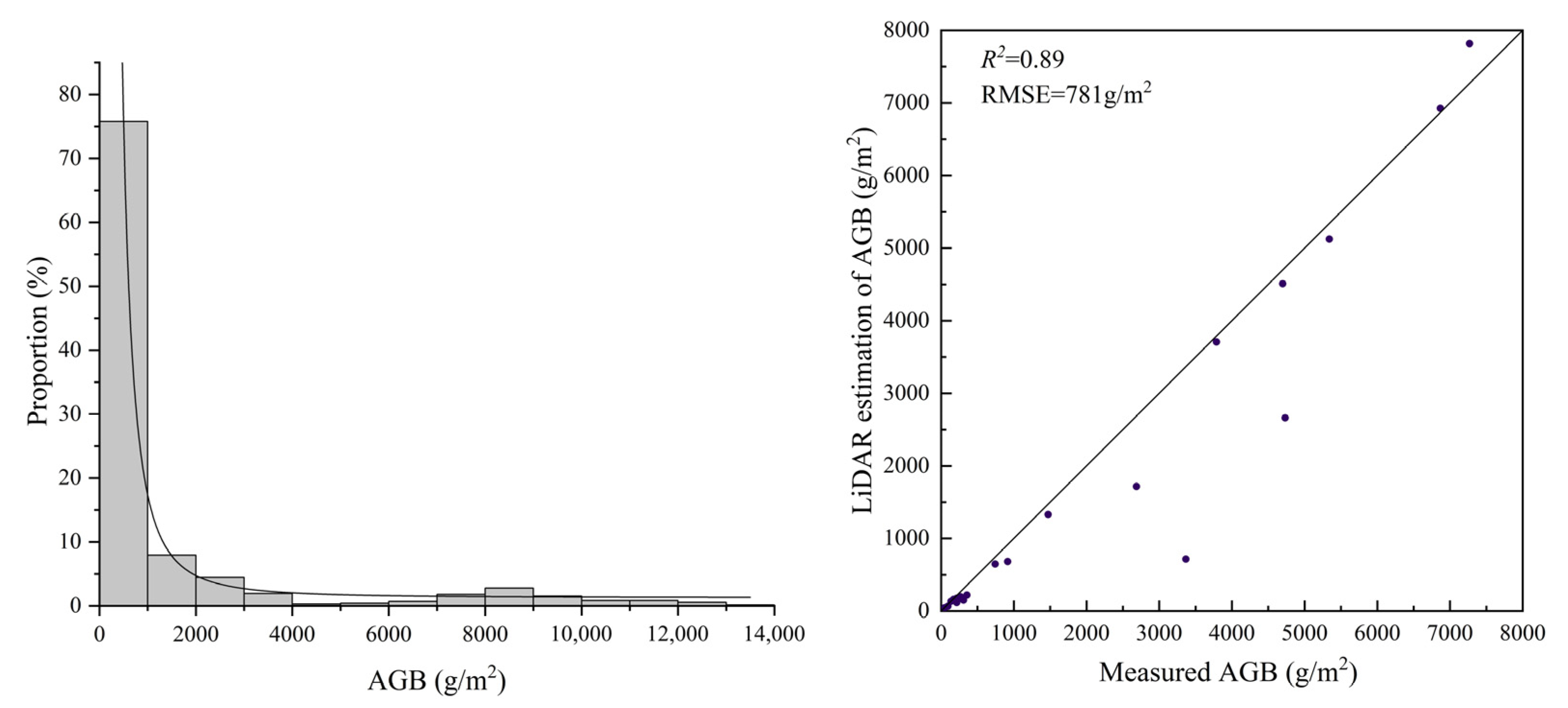
4.2. Construction of AGB Samples
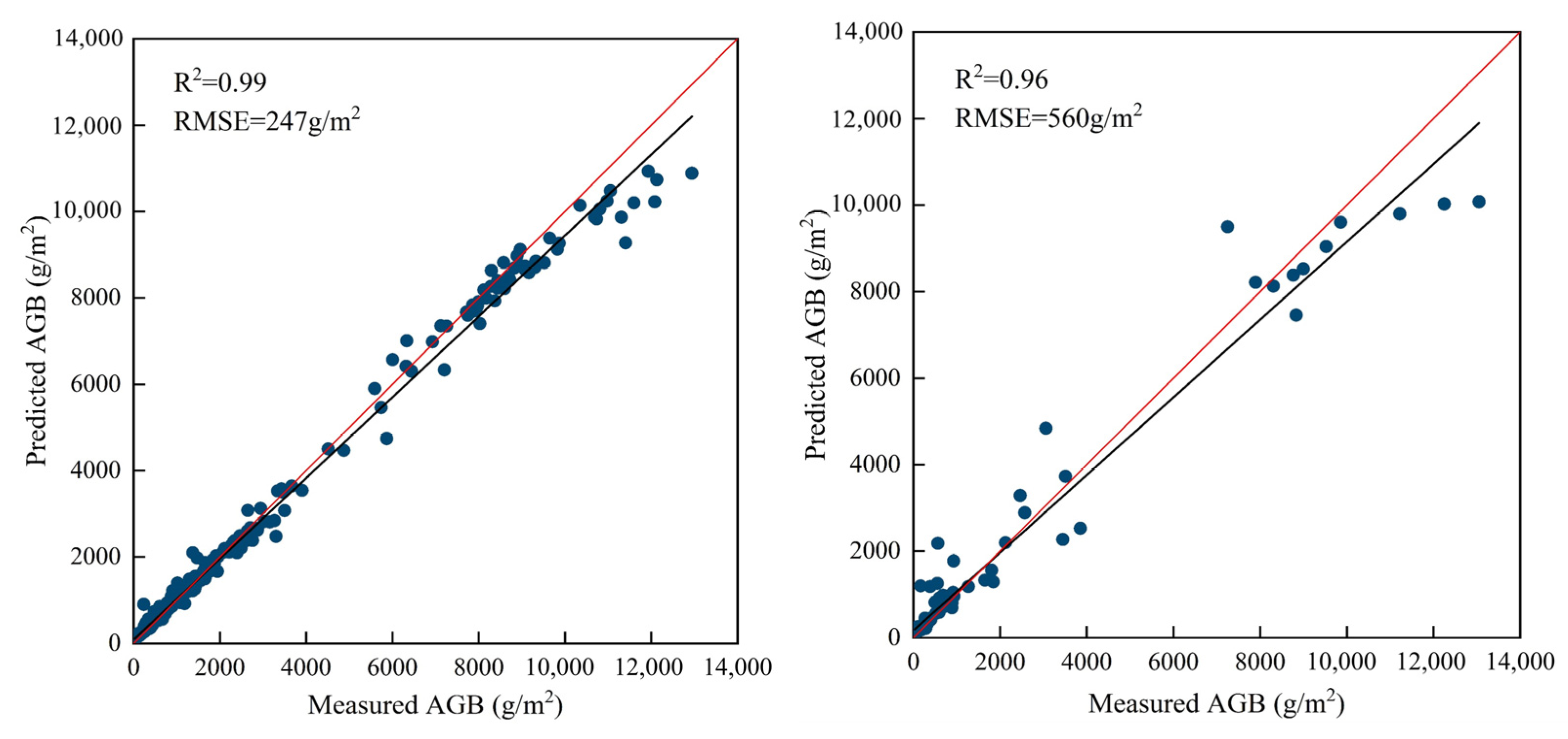
4.3. GBDT Model Construction and Accuracy Analysis
4.3.1. GBDT Model Parameter Optimization
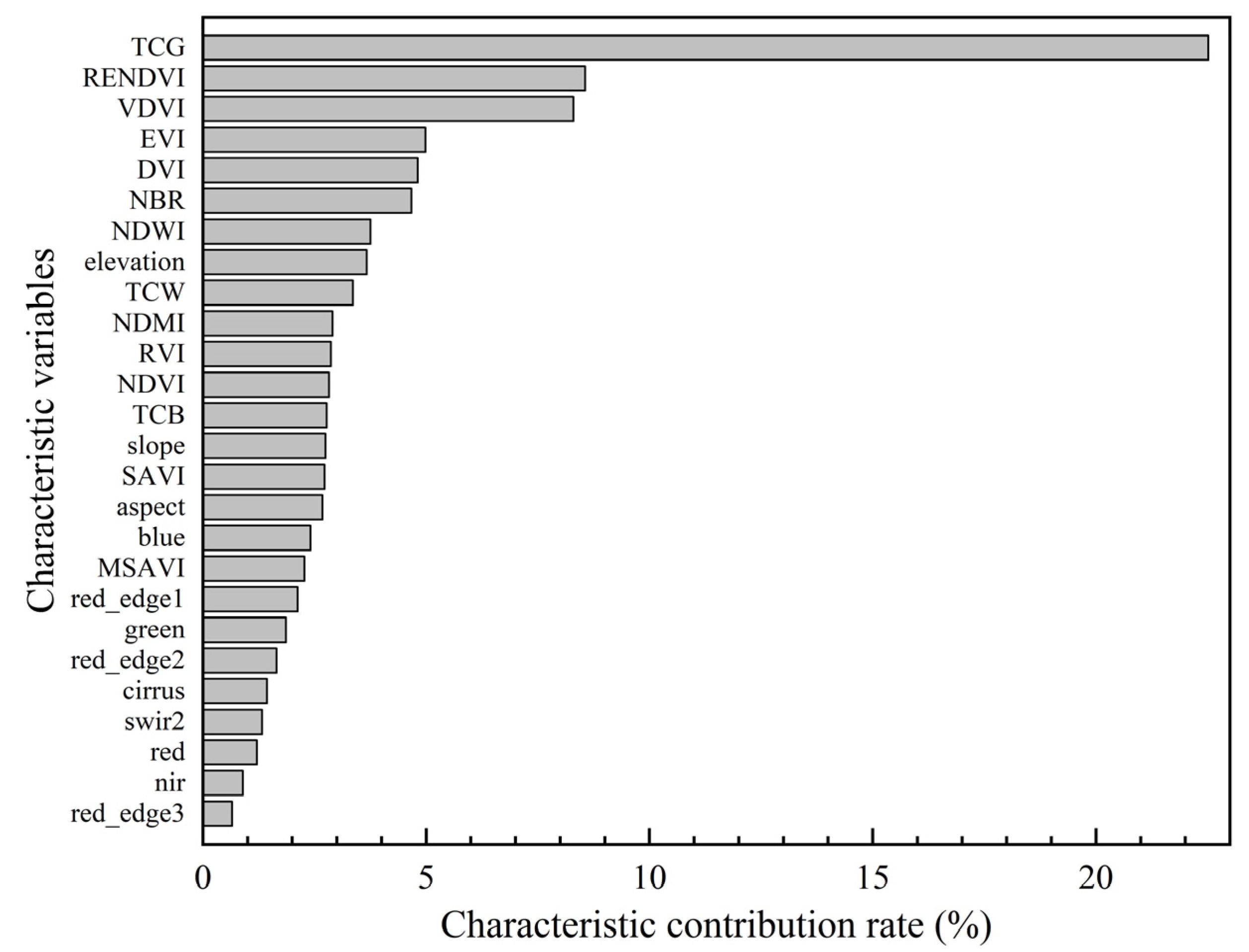
4.3.2. Variable Importance Analysis
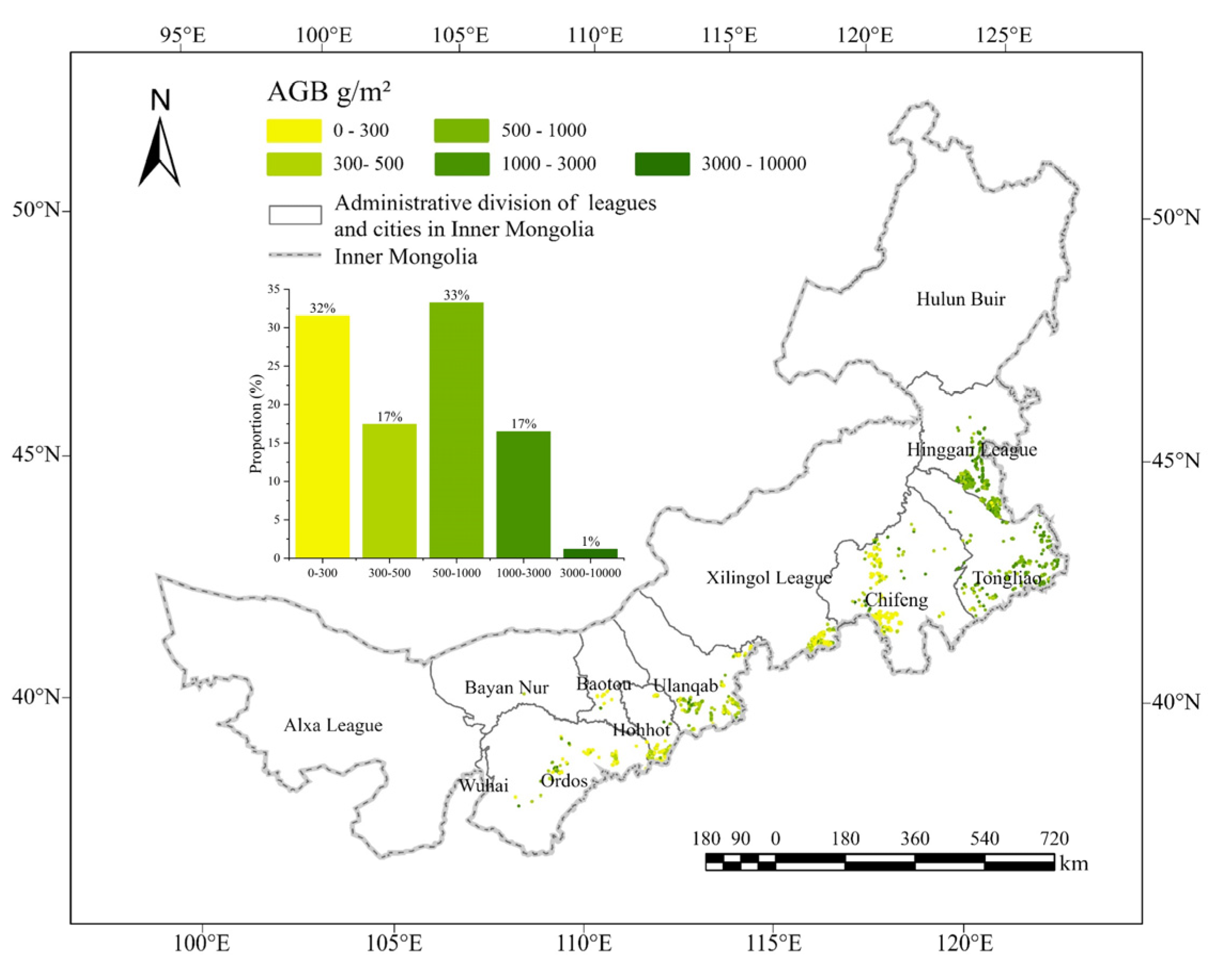
4.4. AGB Distribution of Major Tree Species
5. Discussion
6. Conclusions
- (1)
- The high-quality AGB sample set constructed using LiDAR data and optimal growth models showed excellent agreement with field-measured data, making it a reliable substitute for traditional ground-based measurements in model development.
- (2)
- This study used the AGB sample set, combined with Sentinel-2 images, to establish an AGB estimation model for the main tree species in the GGP stands. This can obtain the AGB of the main tree species in the GGP stands, with an R2 of 0.96 and an RMSE of 560 g/m2, which can provide reference and support for the evaluation of the effectiveness of GGP and ecological benefits.
- (3)
- The tasseled cap transformation index (TCG) and vegetation indices such as RENDVI and VDVI were identified as key variables sensitive to the AGB estimation model. These variables have been demonstrated to be effective for extracting vegetation information in arid and semi-arid regions.
- (4)
- The AGB of the major tree species in the new round of GGP stands in Inner Mongolia ranged from 120 to 9253 g/m2. The mean AGB of poplar was 978 g/m2, the mean AGB of Mongolian Scots pine was 622 g/m2, and the mean AGB of Chinese red pine was 313 g/m2. This distribution characteristic provides a reference for the follow-up conservation and management of the GGP.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, X.Y.; Yu, X.; Wang, F.; Liang, T. Comprehensive Benefit Evaluation on the Project of Converting Farmland to Forestland and Grassland in Arid Desert Area of Northwest China. Res. Soil Water Conserv. 2023, 30, 216–223+232. [Google Scholar] [CrossRef]
- Xu, J.T.; Tao, R.; Xu, Z.G. Sloping Land Conversion Program: Cost-Effectiveness, Structural Effect and Economic Sustainability. China Econ. Q. 2004, 4, 139–162. [Google Scholar]
- Wang, B.; Niu, X.; Guo, K. The Layout of the Ecological Monitoring System of the Gain for Green Project in China. Terr. Ecosyst. Conserv. 2022, 2, 57–72. [Google Scholar] [CrossRef]
- Gaumont-Guay, D.; Black, T.A.; Barr, A.G.; Griffis, T.J.; Jassal, R.S.; Krishnan, P.; Grant, N.; Nesic, Z. Eight Years of Forest-Floor CO2 Exchange in a Boreal Black Spruce Forest: Spatial Integration and Long-Term Temporal Trends. Agric. Meteorol. 2014, 184, 25–35. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, Y.X.; Wang, X.J. Prediction of Forest Biomass Carbon Pool and Carbon Sink Potential in China before 2060. Sci. Silvae Sin. 2022, 58, 32–41. [Google Scholar]
- Campbell, M.J.; Dennison, P.E.; Kerr, K.L.; Brewer, S.C.; Anderegg, W.R.L. Scaled Biomass Estimation in Woodland Ecosystems: Testing the Individual and Combined Capacities of Satellite Multispectral and Lidar Data. Remote Sens Environ. 2021, 262, 112511. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Estimating Aboveground Carbon Stock at the Scale of Individual Trees in Subtropical Forests Using Uav Lidar and Hyperspectral Data. Remote Sens 2021, 13, 4869. [Google Scholar] [CrossRef]
- Luo, S.; Wang, C.; Xi, X.; Pan, F.; Peng, D.; Zou, J.; Nie, S.; Qin, H. Fusion of Airborne LiDAR Data and Hyperspectral Imagery for Aboveground and Belowground Forest Biomass Estimation. Ecol. Indic. 2017, 73, 378–387. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial Laser Scanning in Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Yang, Q.; Su, Y.; Hu, T.; Jin, S.; Liu, X.; Niu, C.; Liu, Z.; Kelly, M.; Wei, J.; Guo, Q. Allometry-Based Estimation of Forest Aboveground Biomass Combining LiDAR Canopy Height Attributes and Optical Spectral Indexes. For. Ecosyst. 2022, 9, 100059. [Google Scholar] [CrossRef]
- Almeida, D.R.A.; Broadbent, E.N.; Zambrano, A.M.A.; Wilkinson, B.E.; Ferreira, M.E.; Chazdon, R.; Meli, P.; Gorgens, E.B.; Silva, C.A.; Stark, S.C.; et al. Monitoring the Structure of Forest Restoration Plantations with a Drone-Lidar System. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 192–198. [Google Scholar] [CrossRef]
- Wang, D.; Wan, B.; Liu, J.; Su, Y.; Guo, Q.; Qiu, P.; Wu, X. Estimating Aboveground Biomass of the Mangrove Forests on Northeast Hainan Island in China Using an Upscaling Method from Field Plots, UAV-LiDAR Data and Sentinel-2 Imagery. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101986. [Google Scholar] [CrossRef]
- Brovkina, O.; Novotny, J.; Cienciala, E.; Zemek, F.; Russ, R. Mapping Forest Aboveground Biomass Using Airborne Hyperspectral and LiDAR Data in the Mountainous Conditions of Central Europe. Ecol. Eng. 2017, 100, 219–230. [Google Scholar] [CrossRef]
- Wang, L.; Ju, Y.; Ji, Y.; Marino, A.; Zhang, W.; Jing, Q. Estimation of Forest Above-Ground Biomass in the Study Area of Greater Khingan Ecological Station with Integration of Airborne LiDAR, Landsat 8 OLI, and Hyperspectral Remote Sensing Data. Forests 2024, 15, 1861. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, X.; Shao, Z.; Jiang, W.; Gao, H. Integrating Sentinel-1 and 2 with LiDAR Data to Estimate Aboveground Biomass of Subtropical Forests in Northeast Guangdong, China. Int. J. Digit. Earth 2023, 16, 158–182. [Google Scholar] [CrossRef]
- Cui, L.H.; Zheng, S.; Xu, M. Remote Sensing Inversion of Forest and Grassland Aboveground Biomass in Inner Mongolia, China. Sci. Geogr. Sin. 2024, 44, 2215–2224. [Google Scholar] [CrossRef]
- Bai, G.L. Estimation Study of Aboveground Biomass in Daxing’anling Forest Inner Mongolia Based on Sentinel 2 Data. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2023. [Google Scholar]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, Y.; Liu, B.; Hovis, C.; Duan, Y.; Shi, Z. Finer Classification of Crops by Fusing UAV Images and Sentinel-2A Data. Remote Sens. 2019, 11, 3012. [Google Scholar] [CrossRef]
- Chen, B.R.; Xin, X.P.; Zhu, Y.X.; Zhang, H.B. Change and Analysis of Annual Desertification and Climate Factors in Inner Mongolia Using MODlS Data. Remote Sens. Inf. 2007, 6, 39–44+104. [Google Scholar]
- Gu, R.Y.; Zhou, W.C.; Bai, M.L.; Di, R.Q.; Yang, J. Influence of Climate Change on Ice Slush Period at Inner Mongolia Section of Yellow River. J. Desert Res. 2012, 32, 1751–1756. [Google Scholar]
- Zhang, C.; Gao, J.; Zhao, Y.L. Climate Changes Analysis in the Inner Mongolia Desert Grassland Based on GlS. Pratacultural Sci. 2014, 31, 2212–2220. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, H.M.; Liu, D.W.; Zhou, Y.; Qing, H.; Wen, L.; Li, Z.Y.; Liang, C.Z.; Wang, L.X. Spatial Distribution Pattern and Dynamic Change of Wetlands in Inner Mongolia. Environ. Sci. Technol. 2016, 39, 1–6+16. [Google Scholar]
- Miao, B.L.; Liang, C.Z.; Han, F.; Liang, M.W.; Zhang, Z.G. Responses of Phenology to Climate Change over the Major Grassland Types. Acta Ecol. Sin. 2016, 36, 7689–7701. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved Progressive TIN Densification Filtering Algorithm for Airborne LiDAR Data in Forested Areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Zeng, W. GB/T 43648-2024 Tree Biomass Models and Related Parameters to Carbon Accounting for Major Tree Species; Standards Press of China: Beijing, China, 2024; ISBN 155066.1-75087. [Google Scholar]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Lv, D.; Zhao, D.; Zhang, Q. Analysis and Optimization of Interpolation Performance of a Variety of Numerical Interpolation Algorithms. Sci. Technol. Innov. 2021, 36, 8–12. [Google Scholar] [CrossRef]
- Zandler, H.; Brenning, A.; Samimi, C. Quantifying Dwarf Shrub Biomass in an Arid Environment: Comparing Empirical Methods in a High Dimensional Setting. Remote Sens. Environ. 2015, 158, 140–155. [Google Scholar] [CrossRef]
- Shao, G.; Shao, G.; Gallion, J.; Saunders, M.R.; Frankenberger, J.R.; Fei, S. Improving Lidar-Based Aboveground Biomass Estimation of Temperate Hardwood Forests with Varying Site Productivity. Remote Sens. Environ. 2018, 204, 872–882. [Google Scholar] [CrossRef]
- Krofcheck, D.J.; Litvak, M.E.; Lippitt, C.D.; Neuenschwander, A. Woody Biomass Estimation in a Southwestern, U.S. Juniper Savanna Using LiDAR-Derived Clumped Tree Segmentation and Existing Allometries. Remote Sens. 2016, 8, 453. [Google Scholar] [CrossRef]
- Campbell, M.J.; Eastburn, J.F.; Mistick, K.A.; Smith, A.M.; Stovall, A.E.L. Mapping Individual Tree and Plot-Level Biomass Using Airborne and Mobile Lidar in Piñon-Juniper Woodlands. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103232. [Google Scholar] [CrossRef]
- Xian, L.H.; Zhu, X.R.; Lu, D.H.; Chen, H.Y.; Gu, D.Q. Estimation Models of Forest Stand Biomass Using Combined Multi-Spectral and LiDAR Technologies. J. Northeast For. Univ. 2024, 52, 85–94. [Google Scholar] [CrossRef]
- Zhou, J.H.; Wang, Z.Z.; Liu, S.X.; Wu, W.J.; Li, L.; Liu, W.D. Remote Sensing Estimation of Forest Aboveground Biomass in Potatso National Park Using GF-1 Images. Trans. Chin. Soc. Agric. Eng. 2021, 37, 216–223. [Google Scholar]
- Yan, H.; Jiang, X.T.; Wang, W.P.; Wu, Z.Y.; Liu, F.; Wei, Y.J. Aboveground Biomass Inversion Based on Sentinel-2 Remote Sensing Images in Chongli District. J. Cent. South Univ. For. Technol. 2024, 44, 53–61. [Google Scholar] [CrossRef]
- Gerlein-Safdi, C.; Keppel-Aleks, G.; Wang, F.; Frolking, S.; Mauzerall, D.L. Satellite Monitoring of Natural Reforestation Efforts in China’s Drylands. One Earth 2020, 2, 98–108. [Google Scholar] [CrossRef]
- Higginbottom, T.P.; Symeonakis, E. Assessing Land Degradation and Desertification Using Vegetation Index Data: Current Frameworks and Future Directions. Remote Sens. 2014, 6, 9552–9575. [Google Scholar] [CrossRef]
- Almalki, R.; Khaki, M.; Saco, P.M.; Rodriguez, J.F. Monitoring and Mapping Vegetation Cover Changes in Arid and Semi-Arid Areas Using Remote Sensing Technology: A Review. Remote Sens. 2022, 14, 5143. [Google Scholar] [CrossRef]
- Sonnenschein, R.; Kuemmerle, T.; Udelhoven, T.; Stellmes, M.; Hostert, P. Differences in Landsat-Based Trend Analyses in Drylands Due to the Choice of Vegetation Estimate. Remote Sens. Environ. 2011, 115, 1408–1420. [Google Scholar] [CrossRef]
- Moyidin, M.H.R.A.Y.; Sawuti, M.M.T.; Li, J.Z. Extraction of Cotton Planting Area Based on Sentinel-2 Time Series Data and Phenological Characteristics. Arid. Land Geogr. 2022, 45, 1847–1859. [Google Scholar]
- Li, X.T.; Yang, L.F.; Zhou, Y.F.; Ma, C. Dynamic Change of Red Edge Vegetation Index within a Growth Cycle in Arid Area under Coal Mining Stress. J. China Coal Soc. 2021, 46, 1508–1520. [Google Scholar] [CrossRef]
- Zhou, H.; Fu, L.; Sharma, R.P.; Lei, Y.; Guo, J. A Hybrid Approach of Combining Random Forest with Texture Analysis and Vdvi for Desert Vegetation Mapping Based on Uav Rgb Data. Remote Sens. 2021, 13, 1891. [Google Scholar] [CrossRef]
- Luo, W.; Gan, S.; Yuan, X.; Gao, S.; Bi, R.; Hu, L. Test and Analysis of Vegetation Coverage in Open-Pit Phosphate Mining Area around Dianchi Lake Using UAV–VDVI. Sensors 2022, 22, 6388. [Google Scholar] [CrossRef] [PubMed]
- Li, P.F.; Guo, X.P.; Gu, Q.M.; Zhang, X.; Feng, C.D.; Guo, G. Vegetation Coverage Information Extraction of Mine Dump Slope in Wuhai City of Inner Mongolia Based on Visible Vegetation Index. J. Beijing For. Univ. 2020, 42, 102–112. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Gitelson, A.A. Remote Estimation of Crop and Grass Chlorophyll and Nitrogen Content Using Red-Edge Bands on Sentinel-2 and-3. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 344–351. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Species | D < 5 cm | D ≥ 5 cm | R2 | MPE (%) |
|---|---|---|---|---|
| Poplar | 0.95 | 4.23 | ||
| Mongolian Scots pine | 0.94 | 5.10 | ||
| Chinese red pine | 0.94 | 5.12 |
| Model Number | Model | Formula |
|---|---|---|
| 1 | Linear regression | |
| 2 | Power function | |
| 3 | Logarithmic model | |
| 4 | Bates model |
| Variable Type | Variable Name | Description | Formula |
|---|---|---|---|
| Spectral information | B2, B3, B4, B5, B6, B7, B8, B11, B12 | Sentinel-2 image band information | |
| Vegetation index | NDVI | Normalized difference vegetation index | |
| RENDVI | Red-edge normalized difference vegetation index | ||
| NDWI | Normalized difference water index | ||
| EVI | Enhanced vegetation index | ||
| RVI | Ratio vegetation index | ||
| DVI | Difference vegetation index | ||
| VDVI | Visible-band difference vegetation index | ||
| SAVI | Soil-adjusted vegetation index | ||
| MSAVI | Modified soil-adjusted vegetation index | ||
| NBR | Normalized burn ratio | ||
| NDMI | Normalized difference moisture index | ||
| Tasseled cap transformation index | TCB | Tasseled cap brightness | |
| TCG | Tasseled cap greenness | ||
| TCW | Tasseled cap wetness | ||
| Terrain information | DEM | Extract elevation information from the DEM | |
| Aspect | Extract aspect information from the DEM | ||
| Slope | Extract slope information from the DEM |
| Tree Species | Model Number | R2 | SSE | AIC |
|---|---|---|---|---|
| Poplar | 1 | 0.81 | 454.94 | 170.20 |
| 2 | 0.82 | 443.96 | 168.58 | |
| 3 | 0.77 | 568.19 | 203.05 | |
| 4 | 0.82 | 432.91 | 162.85 | |
| Mongolian Scots pine | 1 | 0.80 | 17.29 | −118.55 |
| 2 | 0.78 | 18.24 | −112.27 | |
| 3 | 0.74 | 22.37 | −97.94 | |
| 4 | 0.80 | 17.36 | −118.23 | |
| Chinese red pine | 1 | 0.88 | 19.29 | −134.62 |
| 2 | 0.88 | 19.23 | −134.90 | |
| 3 | 0.84 | 25.41 | −109.82 | |
| 4 | 0.88 | 19.86 | −132.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yueliang, G.; Ge, G.; Li, X.; Ji, C.; Wang, T.; Shen, T.; Zhi, Y.; Chen, C.; Zhao, L. The Aboveground Biomass Estimation of the Grain for Green Program Stands Using UAV-LiDAR and Sentinel-2 Data. Sensors 2025, 25, 2707. https://doi.org/10.3390/s25092707
Yueliang G, Ge G, Li X, Ji C, Wang T, Shen T, Zhi Y, Chen C, Zhao L. The Aboveground Biomass Estimation of the Grain for Green Program Stands Using UAV-LiDAR and Sentinel-2 Data. Sensors. 2025; 25(9):2707. https://doi.org/10.3390/s25092707
Chicago/Turabian StyleYueliang, Gaoke, Gentana Ge, Xiaosong Li, Cuicui Ji, Tiancan Wang, Tong Shen, Yubo Zhi, Chaochao Chen, and Licheng Zhao. 2025. "The Aboveground Biomass Estimation of the Grain for Green Program Stands Using UAV-LiDAR and Sentinel-2 Data" Sensors 25, no. 9: 2707. https://doi.org/10.3390/s25092707
APA StyleYueliang, G., Ge, G., Li, X., Ji, C., Wang, T., Shen, T., Zhi, Y., Chen, C., & Zhao, L. (2025). The Aboveground Biomass Estimation of the Grain for Green Program Stands Using UAV-LiDAR and Sentinel-2 Data. Sensors, 25(9), 2707. https://doi.org/10.3390/s25092707