1. Introduction
Automated driving is expected to improve road safety by reducing traffic accidents caused by human error [
1]. In recent years, many companies and authorities have made great efforts to promote the development of automated vehicles [
2]. According to the SAE standard, vehicle automation systems are categorized into 6 levels from L0 to L5 (full automation) [
3]. Due to the limitations of technologies, law, and ethics issues, it is believed that realizing full automation on public roads still requires time, while conditional automation (L3) is expected to be widely applied in the near future [
4]. At L3 driving automation, the vehicle is capable of conducting the entire dynamic driving tasks (DDTs) such as monitoring the environment and self-control under limited conditions. Drivers are not required to monitor the roadway and are able to perform non-driving-related tasks (NDRTs) within the operating design domain (ODD) of the L3 automated system [
3]. When the vehicle is exiting its ODD or encounters an automation system failure, a takeover request (TOR) would be issued by the system, and the driver is required to take over the vehicle control within a limited time during the L3 automated driving to continue with the driving task or avoid any potential accidents [
4]. Although the conditional automation system would bring about many benefits to drivers by allowing drivers to delegate driving tasks to the automated driving system, the safety issue during takeover is the most substantial concern which needs to be addressed when promoting L3 automation vehicles [
5].
Various studies focusing on the takeover issue of L3 automation vehicles have been conducted during the past decade. Considering the potential risk of takeover in the on-road experiments, driving simulator experiments were applied to conduct the studies in most of the relevant literature [
6]. According to the level of urgency of the takeover situation, driving scenarios used in these studies could be divided into two categories: critical and non-critical [
7,
8,
9]. A critical scenario means that the TOR is issued in an unplanned manner and the driver is required to take over the vehicle control in a critical situation (such as an automation system malfunction caused by adverse weather or unexpected lane obstacle detection) [
5]. A non-critical scenario means that the TOR takes place in a planned manner when the vehicle is about to leave the ODD areas, such as entering a ramp or rural roads without traffic signs and markings [
9]. Most of the previous studies focused on critical takeover scenarios, often with the driving tasks of avoiding collisions ahead by braking or changing lanes [
4,
10,
11]. Factors influencing the safety of takeover process in critical scenarios, such as driver characteristics [
4], time-budget [
11], takeover requests [
12], non-driving related tasks [
10], and road conditions [
13], have been investigated in recent years, and meaningful findings and suggestions were obtained. For the non-critical scenarios, the literature on the takeover issue of L3 automation vehicles is limited [
8]. Eriksson and Stanton [
14] performed a takeover experiment for non-critical scenarios without time pressure, suggesting that designers of automated vehicles should take a wider range of takeover times into consideration rather than just focusing on the mean or median values. Pampel et al. [
7] investigated the impact of unplanned and planned TOR on the takeover quality in non-critical situations by a simulator experiment. Xu et al. [
8] investigated drivers’ takeover performance and workload under varying automation levels, time budgets, and road curvatures in driving scenarios wherein the ego vehicle was about to leave the highway. Since non-critical takeovers would be more common than critical takeovers, more studies focusing on the takeover safety issues in non-critical scenarios should be conducted to promote the development of L3 automation vehicles.
Car following is one of the most common situations that drivers encounter on the roads [
15]. It is of great importance to investigate the safety issues relating to the takeover in the situation of car following. The car-following scenarios were used in some driving simulator experiments to measure drivers’ takeover performance in L3 automated driving [
16,
17]. In the experiment of Lu et al. [
16], the car-following distance was set to 44.44 m by the system under different modes, representing a 2 s time headway (THW) to the leading vehicle. Two kinds of critical scenarios were established by making the leading vehicle decelerate from 80 km/h to 30 km/h at 3 m/s
2 or change lane before the obstacle. Through changing the value of THW, three levels of critical scenarios (least critical, medium critical, and most critical) were set to investigate drivers’ takeover performance in critical brake situations [
17]. With a leading vehicle running ahead, drivers of the ego vehicle could experience takeover scenarios with varying objective criticality by changing the THW and deceleration rate of the leading vehicle. In this context, the comparison of drivers’ takeover performance between critical and non-critical scenarios could be conducted in the car-following situation. Although several previous studies have examined the takeover performance in different critical scenarios in the car following situation, the non-critical scenario was not included. Moreover, as one of the important environmental factors affecting road safety, visibility significantly affects the driver’s behaviors [
18,
19]. Previous research has confirmed that reduced visibility in foggy conditions could increase the risk of collisions in the car-following situation [
18]. Therefore, it is necessary to take the visibility into consideration when investigating the takeover risk from automation system in the car following scenarios. Several studies have examined the effects of visibility (in fog condition) on the takeover performance [
20,
21,
22]. However, the findings in these studies are not in agreeance with each other, and more relevant studies are needed.
Therefore, this study aimed at filling the research gaps mentioned above with the following aspects: (i) investigating the effects of low visibility and time headway on the takeover performance in the L3 automation stage by conducting a driving simulator experiment; (ii) both non-critical and critical scenarios are taken into consideration by changing the acceleration value of the leading vehicle. The takeover time including the takeover reaction time and takeover control time was examined and analyzed by ANOVA (Analysis of Variance). A binary logit model was estimated to evaluate the takeover risk. The results presented in this study are expected to facilitate the overall understanding of the effects of visibility and time headway on the takeover risk and make a contribution to the improvement of takeover safety in conditionally automated driving.
The rest of this paper is organized as follows.
Section 2 presents the driving simulator experiment, data collection and analysis methods. The results a are given in
Section 3, followed by discussions in
Section 4. Finally,
Section 5 concludes the paper.
2. Methodology
2.1. Participants
A total of 35 participants were recruited among students and professional drivers at Tongji University for the driving simulator experiment. Each of them held a valid full driver’s license for at least two years. Moreover, each participant was in good health and had driving experience in foggy conditions. A questionnaire containing information about the driving experiment and some cautions was completed by each participant. Before conducting the experiment, informed consent was obtained from all subjects. Since 5 participants failed to complete the experiment as required due to driving simulator sickness, data from them were excluded from the analysis. The remaining 30 participants (12 females and 18 males) were aged from 21 to 51 years old (M = 30.2, SD = 8.6), and the average driving experience of these subjects was 6.6 years (SD = 4.7). Participants who met the following requirements were labeled as experienced drivers: (a) having more than three years of driving experience, (b) having an average annual driving mileage over 10,000 km during the last 3 years, (c) and not being involved in any accidents or crashes. Based on these three criteria, 14 participants were classified as experienced drivers.
2.2. Apparatus
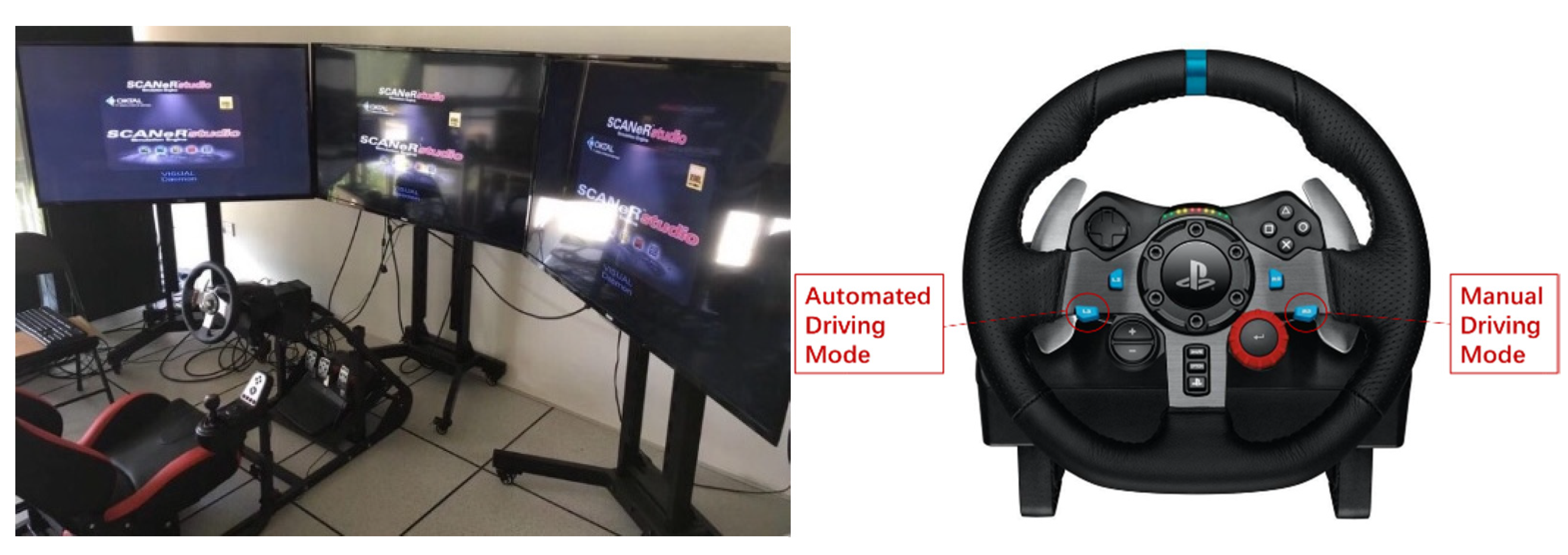
The experiment was conducted based on an integrated driving simulation platform as shown in
Figure 1, which was used in the previous study by Li et al. [
2] to perform the driving simulator experiment. The driving simulation platform is mainly composed of the Logitech G29 driving simulation suite and SCANeR Studio, commercial software developed by the Oktal Co., Ltd. (Toulouse, France)). The driving simulation suite consists of pedals, a seat, and a steering wheel with dual motor force feedback technology. Two buttons on the steering wheel are set to transfer the mode from automated driving to manual driving or vice versa. The projection system comprises 3 TV screens, providing a frontal field of view about 135° × 40° (horizontal × vertical) from the driver’s perspective. The views of the rearview mirror and two side mirrors are also projected on the screens. The instrument panel is displayed at the bottom of the middle screen, showing the driver important information about the status of the vehicle. The sound system is used to output the takeover prompt as well as reproduce the environmental and vehicular noise.
2.3. Experimental Design
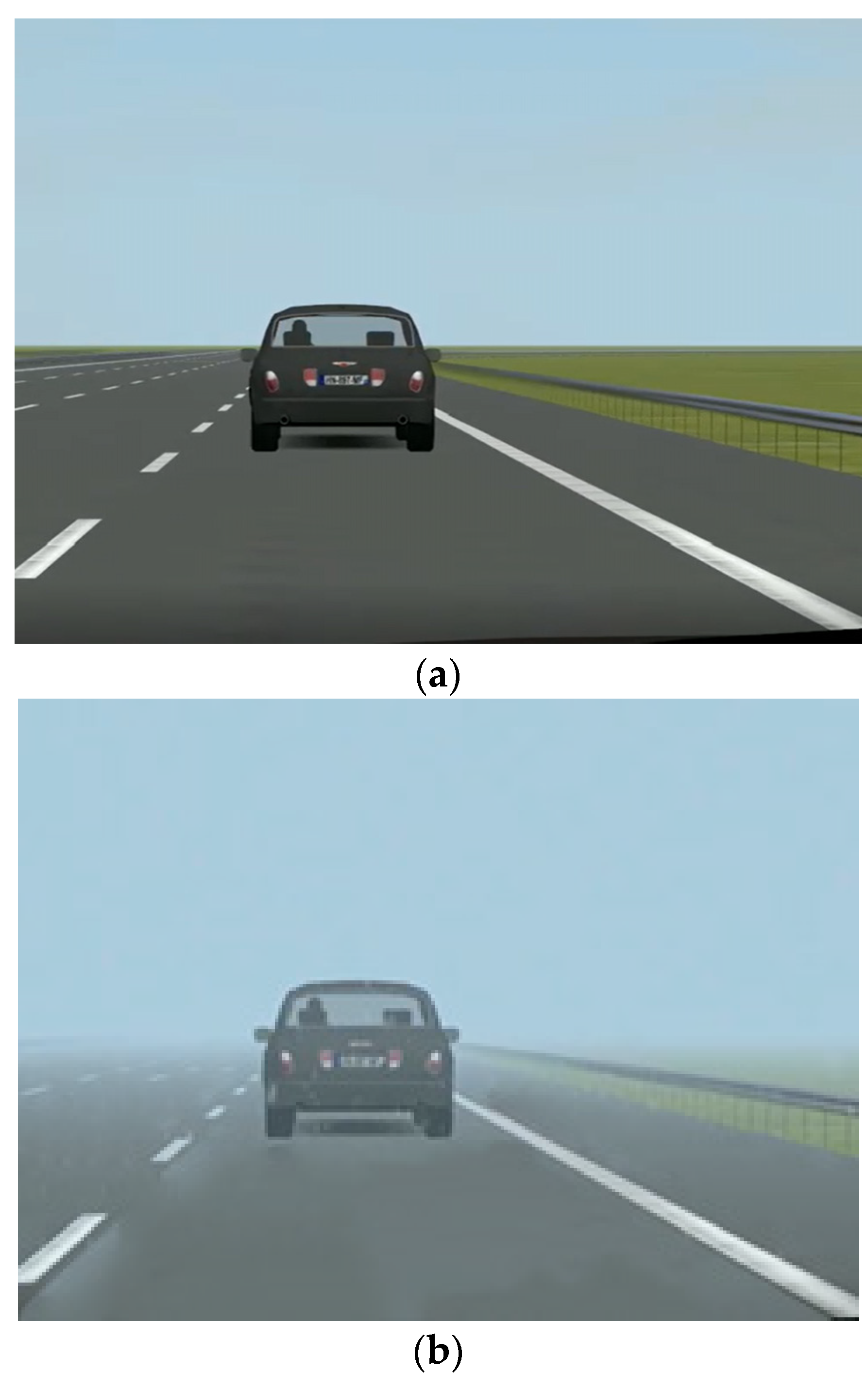
The objective of this study is to investigate the takeover performance. The experimental scenarios are based on a three-lane straight highway with a continuous emergency lane on the right side (
Figure 2). This kind of highway scenario has been used in many previous studies [
2,
12,
16], mainly for two reasons: (i) highways have a closed road environment and less interference compared with complex urban roads or rural roads, which are more suitable for the application of automated vehicles; (ii) the two-way six-lane highway or the one-way three-lane highway is very common, and a comparison between the driving simulation test and on-road test could be conducted in the future. For the automated conditions, the ego vehicle maintained a speed of 80 km/h in the right lane and followed a leading vehicle with the same speed. The automated driving of the ego vehicle and the transition between automated driving mode and manual driving mode were realized by the driving simulation system of SCANeR Studio.
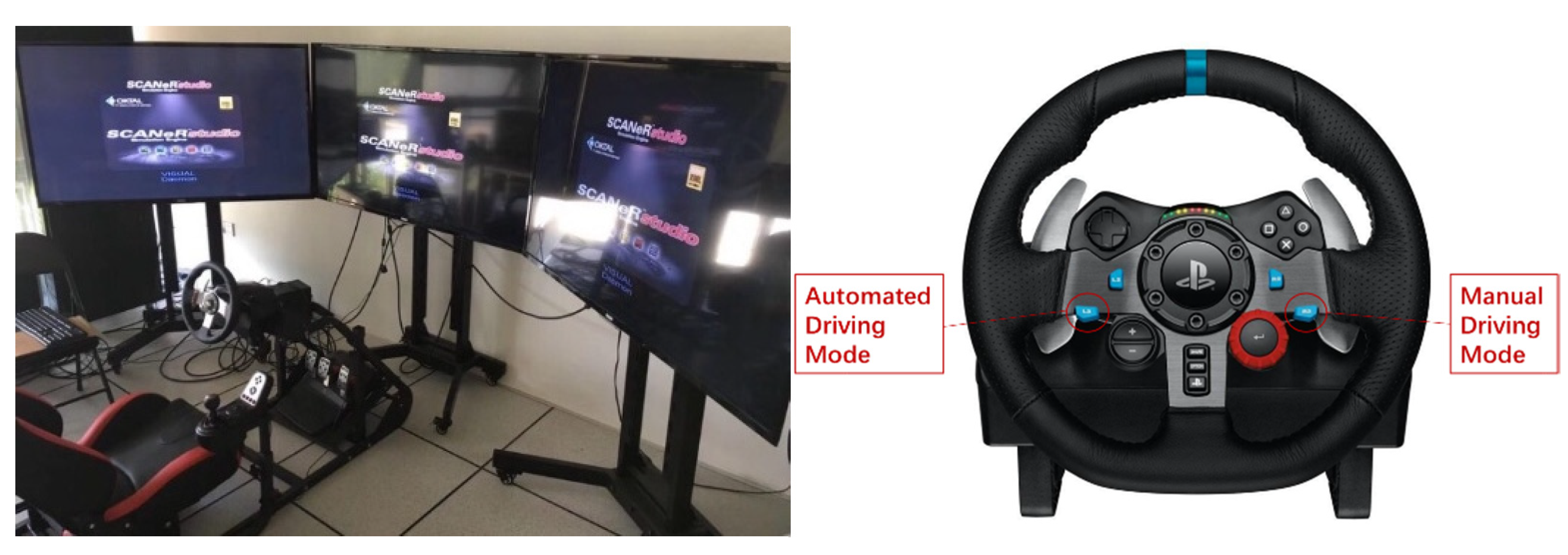
A 2 × 3 × 3 within-subject experimental design was employed with three independent factors (level of visibility, following distance, and emergency level). For the visibility, as shown in
Figure 3, the visibility distances of clear weather and light-fog conditions were set at >1000 m and 140 m, respectively [
18]. The time headway (THW) between the ego vehicle and the leading vehicle was used to represent the following distance. Three levels of following distance (THW = 2 s, THW = 3 s, THW = 4 s) were employed in the driving scenarios. As the same time of the initial of takeover prompts, the acceleration of the leading vehicle (ALV) was applied to produce three emergency levels of takeover scenarios. ALV = 0 m/s
2 means a non-critical scenario, and ALV = −2 m/s
2 or −4 m/s
2 means a critical scenario. Therefore, a total of 18 scenarios (see
Table 1) were included in the driving simulator experiment.
2.4. Experiment Procedure
Firstly, participants were required to complete a questionnaire with items about personal characteristics, such as gender, age, driving experience and so on. Then, participants were given instructions on the driving simulation system, takeover requests, as well as the experiment procedures. Next, each participant was required to perform a 5-minute practice drive to become familiar with the driving simulator and the takeover process. Since these participants have the experiences of driving simulator experiments using the same platform, the practice driving of 5 min is suitable in this study.
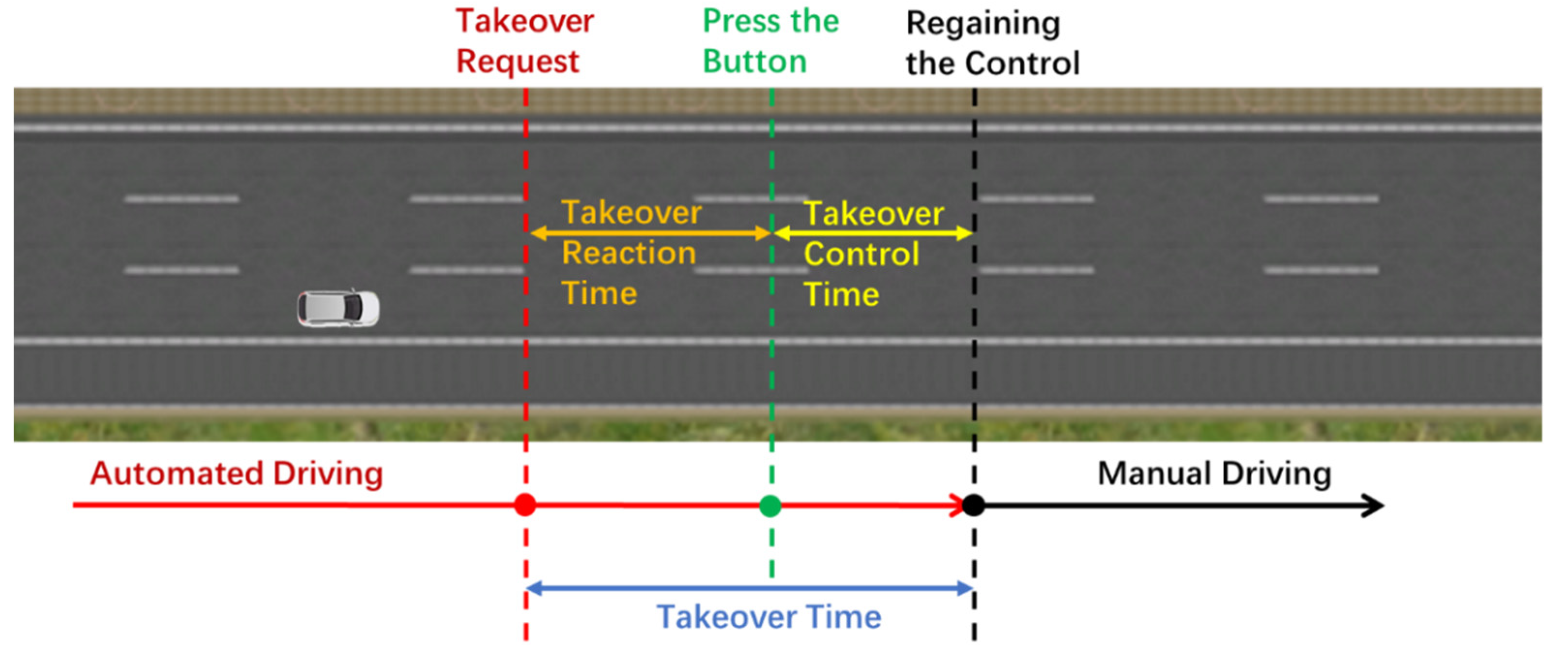
After all these preparations, the formal experiment including 18 driving scenarios began. For each driving scenario, the participant needed to complete the whole process of “manual driving–automated driving–manual driving”. Firstly, the participant should start the ego car and speed it up to around 80 km/h. Then, the participant could transfer the control to the automation system by pressing the button of “Automated Driving Mode” on the steering wheel. Once entering the automated driving mode, the ego vehicle’s speed would be adjusted exactly to 80 km/h and the time headway would be smoothly adjusted to a certain value (2 s, 3 s, or 4 s) by the driving simulation system. During the automated driving, participants were required to watch videos on a tablet computer. Once they heard the takeover requests of “Please Takeover”, they were required to press the button “Manual Driving Mode” and takeover the ego vehicle in a timely fashion, as shown in
Figure 4. Participants could keep following the leading vehicle or choose to change lanes according to their willingness. To eliminate the effect of experimental sequence, participants were assigned to 18 driving scenarios in a random order.
2.5. Data Collection, Measures, and Analysis
Data related to the drivers’ operational behaviors and the vehicle’s running state were collected with the frequency of 20 Hz through the driving simulator system. A document in the form of CSV was output for each participant after the experiment of one driving scenario. In total, 540 CSV files were obtained at the end of the driving simulator experiment in this study. As for the ego vehicle, the speed, acceleration, and position data were collected. As for the takeover process, the time of pressing the button, the time of pushing the gas pedal or the brake pedal, and the time of steering were output.
Based on the data obtained from the driving simulation system, some measures of interest were extracted or calculated. As shown in
Figure 4, takeover time refers to the time between the takeover request and the driver regaining the control of the vehicle. Mainly three kinds of takeover responses (pushing the brake pedal, pushing the gas pedal, and manipulating the steering wheel) were conducted by participants to regain the vehicle control. The criteria of a driver regaining the vehicle control are set as follows: (i) pushing the brake or gas pedal over 10% of the range; (ii) the steering wheel angle changes over 2 degrees. According to the criteria above, the time when a driver regains the vehicle control could be extracted and the first response to regaining the vehicle control was the takeover response of the driver. Then, the takeover time could be obtained with the time of takeover request and the time of regaining the vehicle control. In this study, the takeover time was divided into two parts: (i) takeover reaction time (TRT) and (ii) takeover control time (TCT). As displayed in
Figure 4, TRT is the time from takeover request to pressing the button of automated driving mode, and TCT refers to the time between pressing the button and regaining the vehicle control.
The minimum time-to-collision (Min TTC) [
12,
21] that occurred within the takeover process was derived in order to measure the takeover risk. The Min TTC is an effective measure to assess the risk of potential collisions. In this study, the Min TTC refers to the minimum time required for the ego vehicle to collide with the leading vehicle during the whole takeover process, which is calculated as follows (
is the distance between the ego vehicle and the leading vehicle;
is the time;
is the length of the leading vehicle;
is the speed of the ego vehicle and
V1 is the speed of the leading vehicle):
ANOVA (Analysis of Variance) was carried out on continuous variables, and a binary logit model [
13] was applied to examine the risk of takeover process. In this study, the Min TTC threshold of 1.5 s was used to define the takeover risk level (High Risk with the Min TTC < 1.5 s and Low Risk with the Min TTC ≥ 1.5 s). Specifically, the dependent variable Y representing the takeover risk level is a binary variable that can take on two values:
Suppose the conditional probability of the occurrence of the outcome is modelled as a logistic distribution:
Then, the odds of High Risk (
) happening is
, and the binary logit model has the form
where
is the conditional probability of the High Risk occurrence;
denotes independent variables, which can be categorical or continuous;
is the intercept and
is the regression coefficient associated with each independent variable. The values of
and
are typically estimated by the maximum likelihood (ML) method, which is designed to maximize the likelihood of reproducing the data given the parameter estimates [
23].
The value of determines the direction of the relationship between and the logit of . means larger values are associated with larger logit of , and conversely, means larger values are associated with smaller logit of . Generally, the odds ratio OR = exp() is applied to interpret the estimated results for both categorical and continuous independent variables. OR > 1 (or OR < 1) indicates the odds of outcome increases (or decreases) when the corresponding independent variable increases by one unit, keeping other variables constant.
4. Discussion and Limitations
This study aimed to investigate the influence of the visibility distance (VD) and the time headway (THW) on the takeover risk under the conditionally automated driving situation. Both non-critical and critical driving scenarios were provided to the drivers involving the driving simulator experiment by changing the value setting of the acceleration of the leading vehicle (ALV).
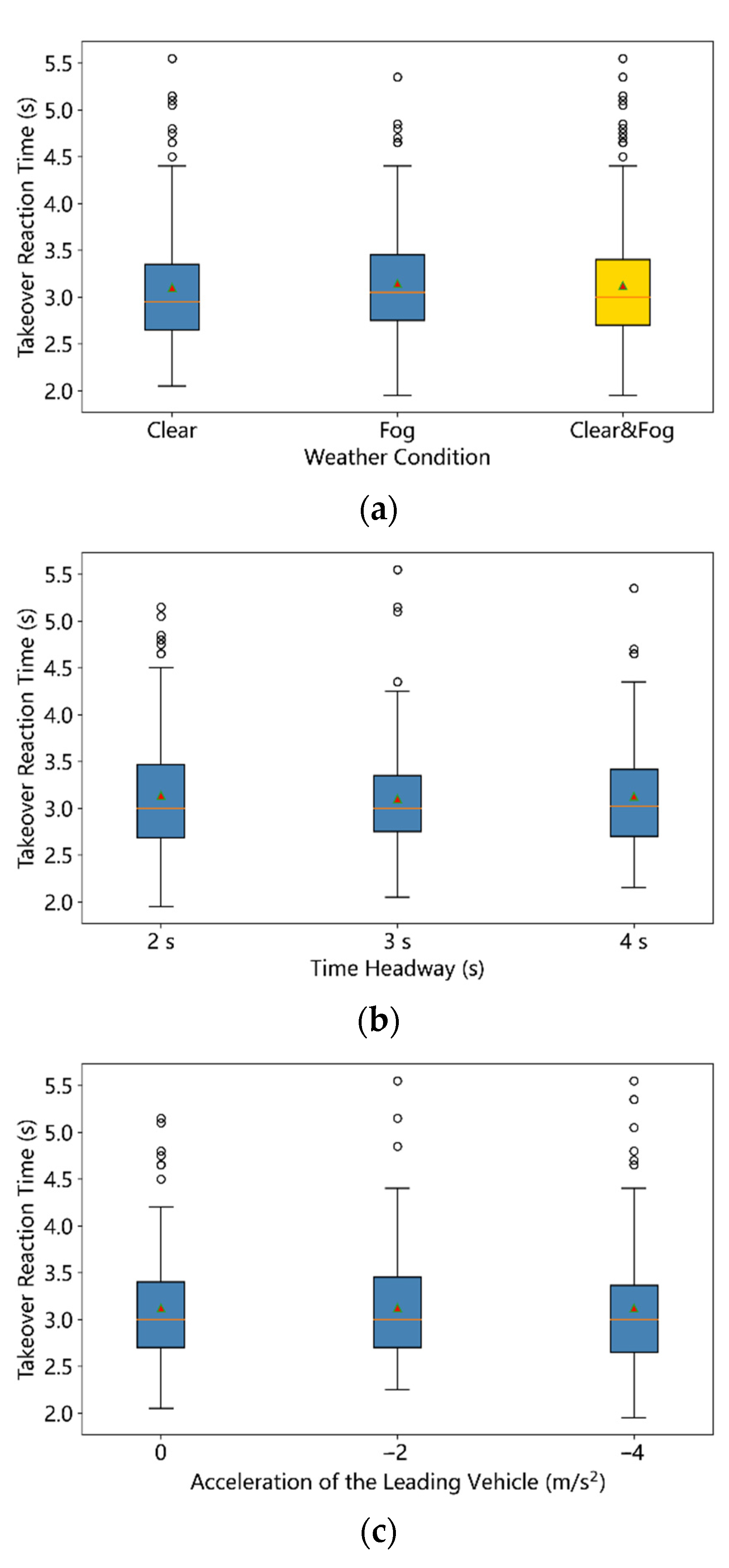
As for the takeover time, both takeover reaction time (TRT) and takeover control time (TCT) were analyzed. No significant differences in TRT among different driving scenarios were observed in this study, which suggests that these participants tended to press the button of manual driving mode at their own pace once they received takeover requests. The urgency of the scenario imposed limited influence on the TRT. This is consistent with previous studies reviewed in Eriksson and Stanton [
14], which indicated that the values of TRT stay fairly consistent in most control transitions. This could be explained by participants’ understanding of the necessary of takeover during conditionally automated driving. Before conducting the experiment, participants were informed about the takeover process and the need to avoid collisions. Thus, most of the participants tended to press the button even though they did not confirm the urgency of the situations ahead. Moreover, before hearing the takeover requests, all the participants were performing the same non-driving related task in this study, so the effects of NDRTs on the TRT could be neglected.
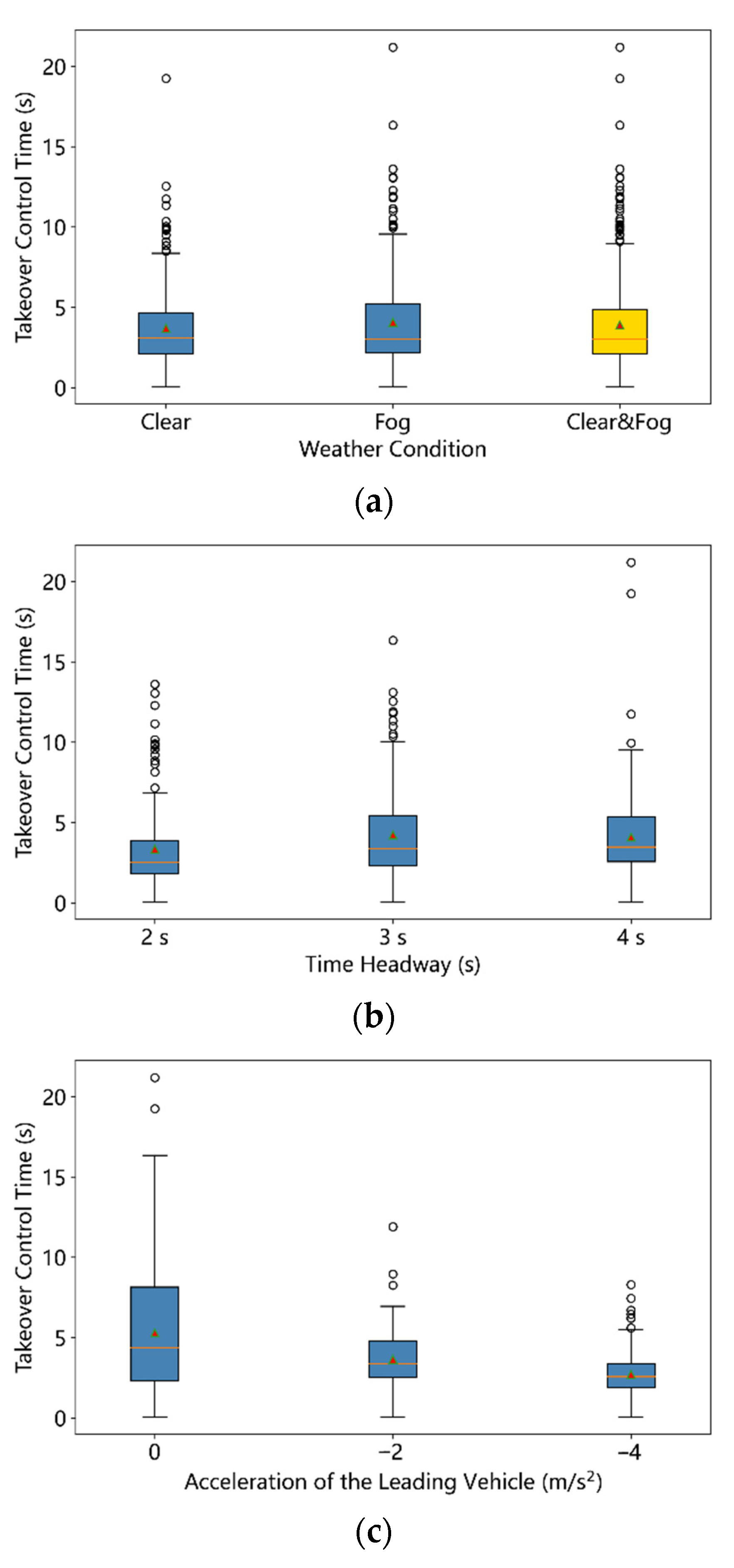
The takeover control time (TCT) was influenced by THW and ALV significantly in this study, which suggested that the urgency of the scenario could affect the TCT of these participants. This indicates that for most of the drivers, they would confirm the risk of the situation ahead before making an adequate decision and response to regain the vehicle control [
24]. As the ALV decreases, which means the driving scenario becomes more critical, the mean value and the maximum of TCT decrease significantly. This is consistent with the finding from previous research [
25] that drivers would take over faster when given a shorter time budget compared a longer time budget. Although a significant decrease in TCT when THW = 2 s was found compared with larger THW values, the difference in TCT between THW = 3 s and THW = 4 s was not significant. This could be explained in terms of the fact that the THW over 3 s means a safe car-following situation even for conservative drivers [
26,
27].
The VD levels in this study did not bring about a significant influence on the takeover time or takeover responses, as well as the takeover risk. This could be induced by the fact that the visibility distance (140 m) in the fog condition was larger than the car following distance in all the driving scenarios. Although the fog would impair the clarity of the front view of drivers, they could still spot the leading vehicle and recognize if the leading vehicle was braking or not according to the tail lamp. Therefore, the effects of VD on the drivers’ TCT and takeover responses are limited in this study.
The result of the binary logit model highlights the significant difference of takeover risk between the sub-critical (ALV = −4 m/s2) and most-critical (ALV = −4 m/s2) driving scenarios. Although the TCT decreases as the ALV decreases, the takeover risk increases significantly due to the decrease in the time-budget in most-critical scenarios compared with the sub-critical scenarios. The timely brake by the drivers is very important to reduce the takeover risk, as revealed by the result of the binary logit model. Taking the TCT and the takeover response into consideration, decreasing the TCT and taking the appropriate takeover response would reduce the takeover risk significantly. If the urgency of the driving scenario or the time budget for takeover is constant, improving the drivers’ ability to realize the risk of the situation quickly and take correct responses would benefit the safety of the takeover process in the conditionally automated driving. Therefore, it is suggested that the automation system should provide the driver with the urgency of the situation ahead and the tips for takeover responses by audio prompts or the head-up display.
There are several limitations in this study, which should be considered when interpreting the results. First, the VD values are larger than the car-following distance in all the driving scenarios, which could not reveal the effects of heavier fog conditions on the takeover risk. More VD values corresponding to different kinds of fog conditions [
18] are needed in future studies. Second, participants in the driving simulator experiment were requested to conduct the same non-driving-related task, which would not be the case in real driving processes. The effects of NDRT should be included in future studies. Finally, in order to set up a controlled experiment, the speed of the leading vehicle is the same under different VD conditions. It should be noted that a lower vehicle speed is more appropriate in a heavier fog condition.
5. Conclusions
To examine the effects of the visibility distance (VD) and the time headway (THW) on the takeover performance in conditionally automated driving, a driving simulator experiment was conducted. Both non-critical and critical scenarios were taken into consideration by adjusting the acceleration of the leading vehicle (ALV). A 2 × 3 × 3 within-subject experimental design was employed with three independent factors (VD, THW, and ALV), which results in 18 driving scenarios in the driving simulator experiment. The takeover reaction time (TRT), takeover control time (TCT) and takeover responses (TR) were analyzed based on the data from 30 participants. Moreover, the binary logit model for takeover risk was estimated, in which the Min TTC was employed to set the risk levels. The conclusions are summarized as follows:
(i) The mean value of the takeover reaction time is 3.12 s with the standard deviation of 0.62 s. All three factors (VD, THW and ALV) have no significant effects on the takeover reaction time. The VD has no significant effects on the takeover control time, while the THW and the ALV could affect the takeover control time significantly.
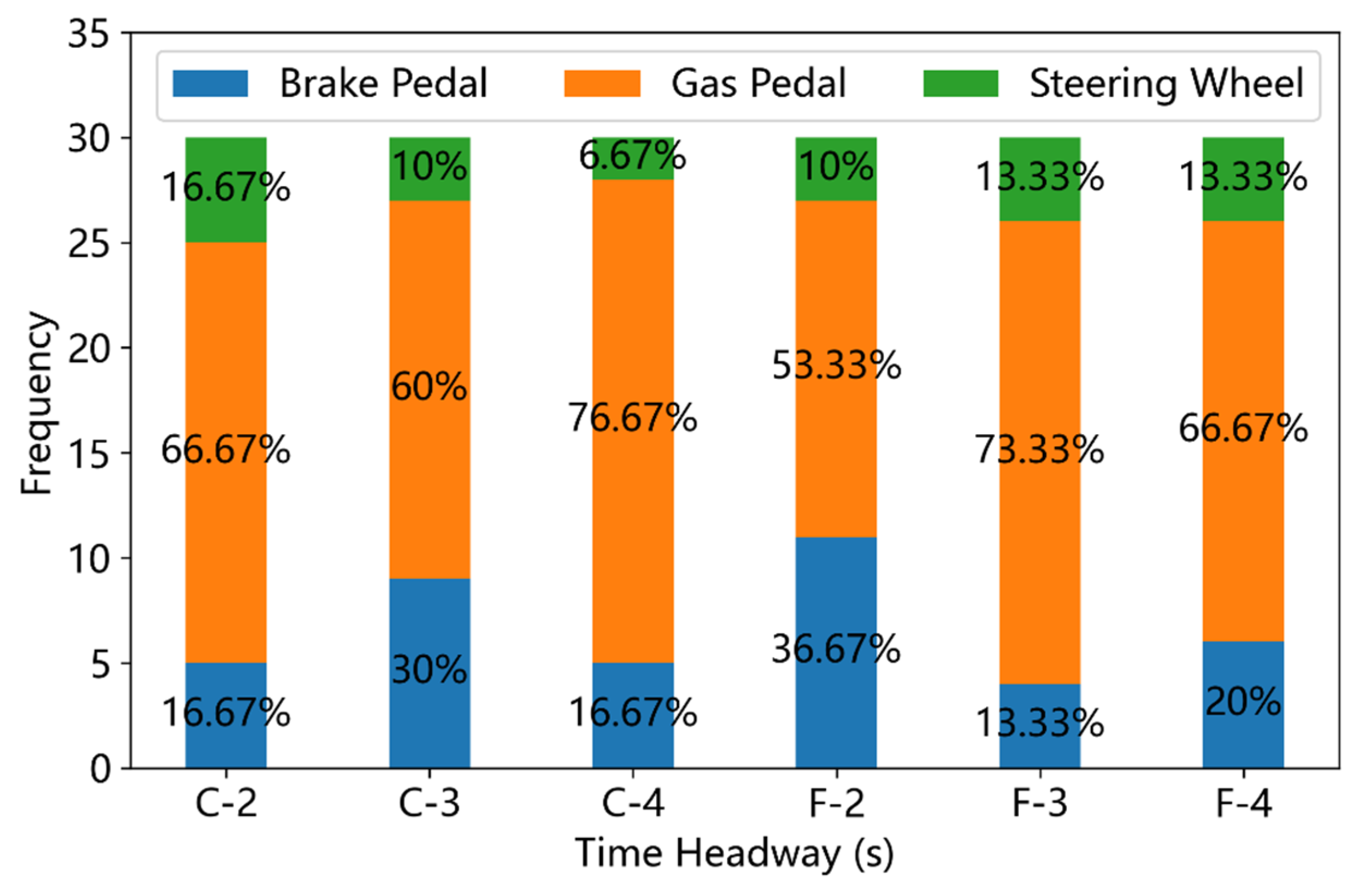
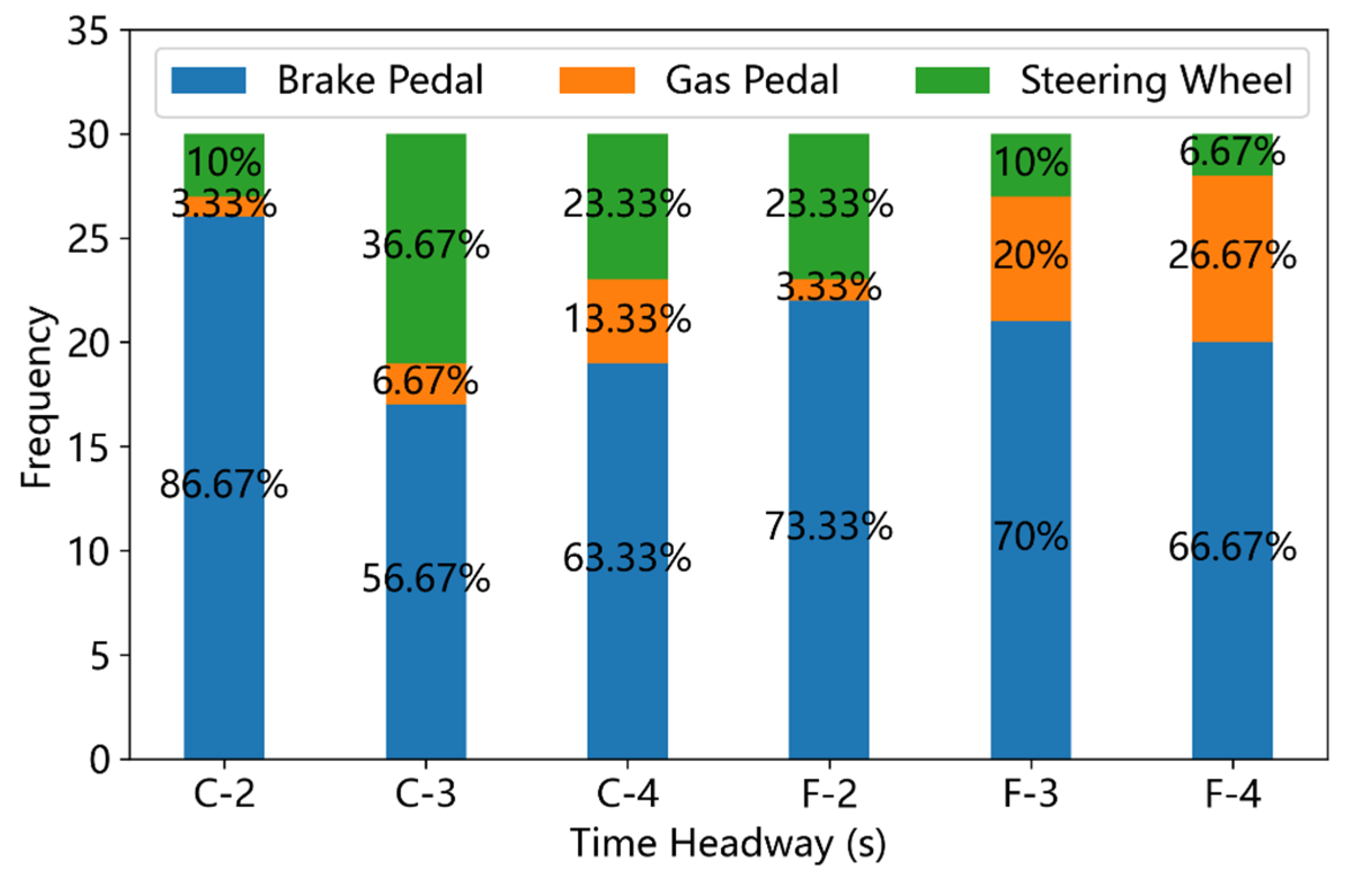
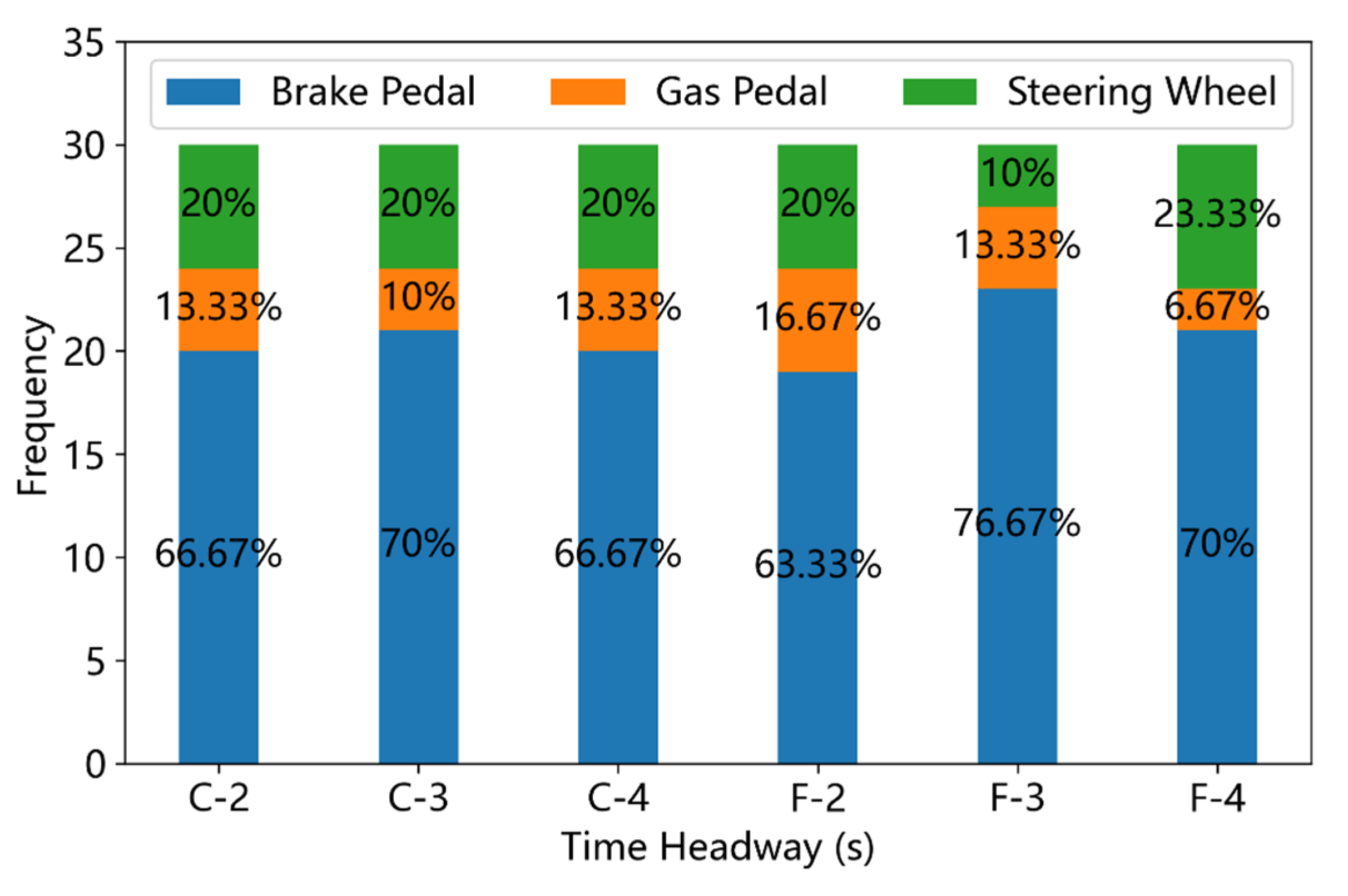
(ii) Most of the participants would push the gas pedal to accelerate the ego vehicle as the takeover response under non-critical scenarios, while braking is the dominant takeover response for participants in critical driving scenarios.
(iii) Decreasing the TCT and taking the appropriate takeover response would reduce the takeover risk significantly. Therefore, it is suggested that the automation system should provide the driver with the urgency of the situation ahead and the tips for takeover responses by audio prompts or the head-up display.
In summary, this study provides some valuable information for better understanding the effects of visibility and time headway on the takeover performance and is expected to be helpful to improve the safety of takeover process in conditionally automated driving. However, just two visibility levels were considered in this study. More levels of visibility should be designed in the driving scenarios in future studies.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}