Traveling Wave Fault Location Using Layer Peeling



Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. New Approach
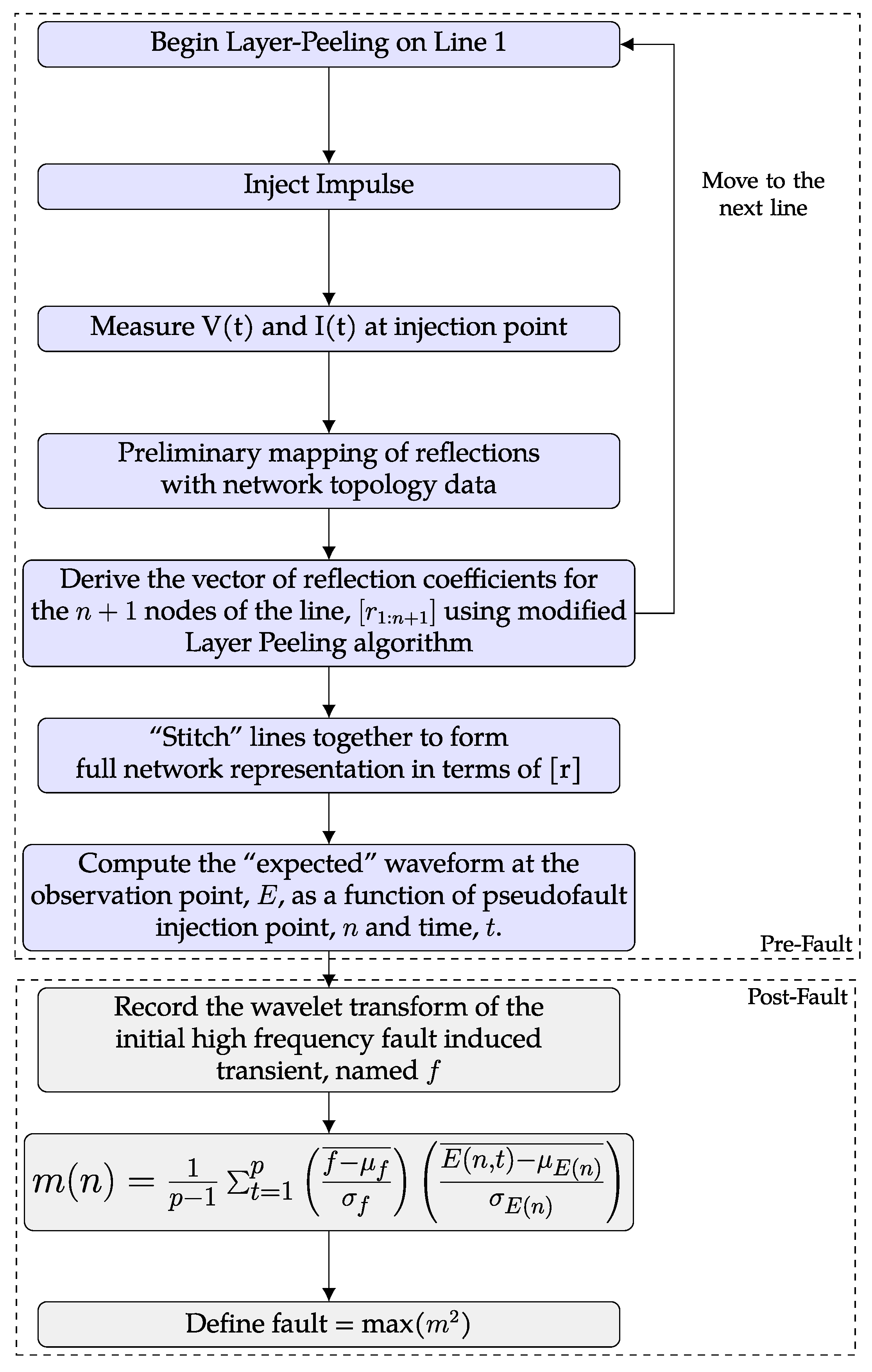
2. Overview of the Proposed Method
3. Layer Peeling for Lossy Electrical Networks
- An impulse is injected into the line from position .
- The voltage and current at the point of impulse injection is recorded.
- Calculate the reflection coefficient of the first reflector, usingwhere is the time delay between the injected impulse and the first returning pulse.
- Infer by “propagating” through . Infer by “reverse propagating” through .
- Calculate the reflection coefficient of the second reflector, usingwhere is the time delay between the second returning pulse and the third returning pulse.
- Continue the process until a sufficient depth into the line has been reached.
3.1. Correcting for Lossy Lines
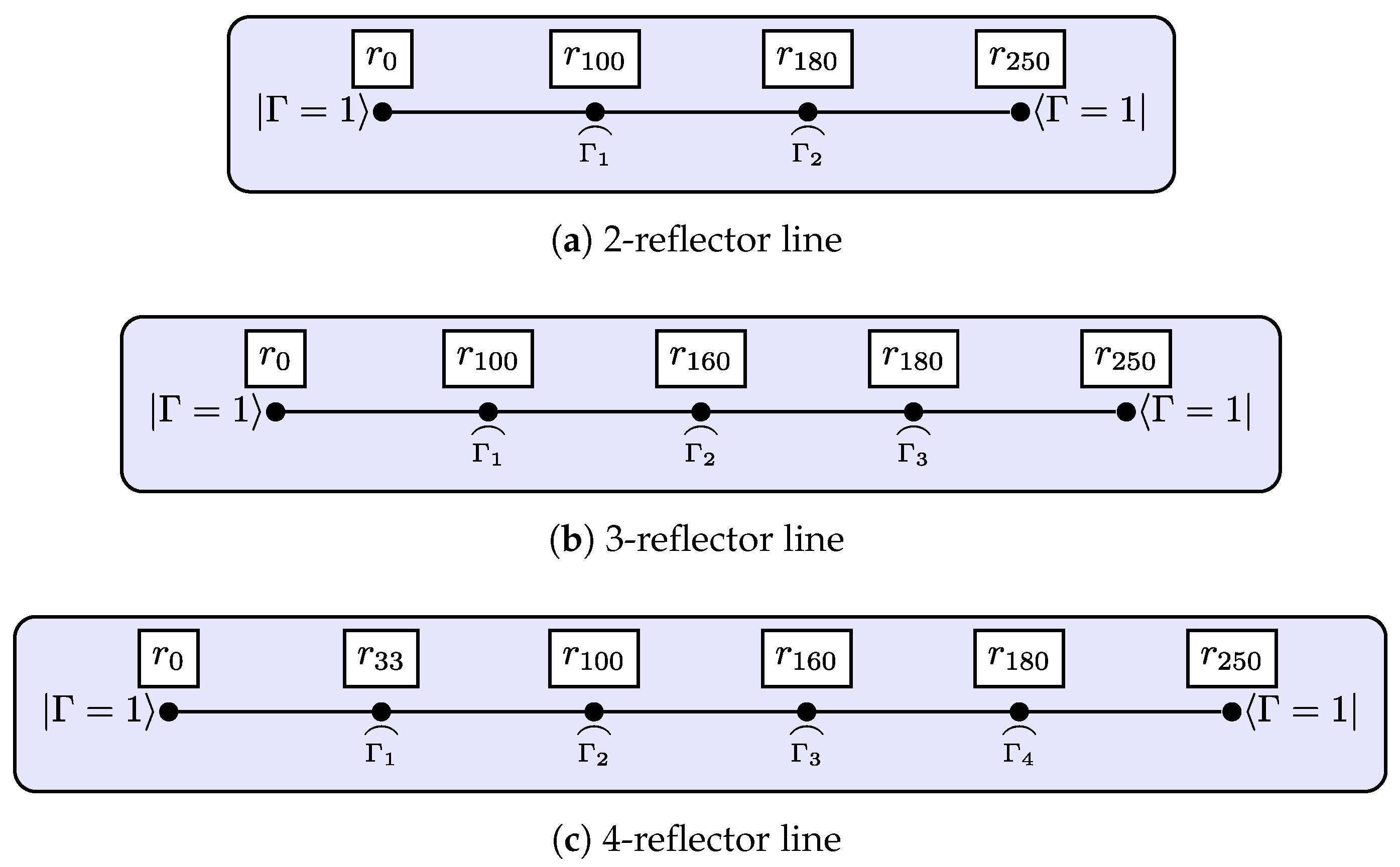
3.2. Accounting for Internal Reflections
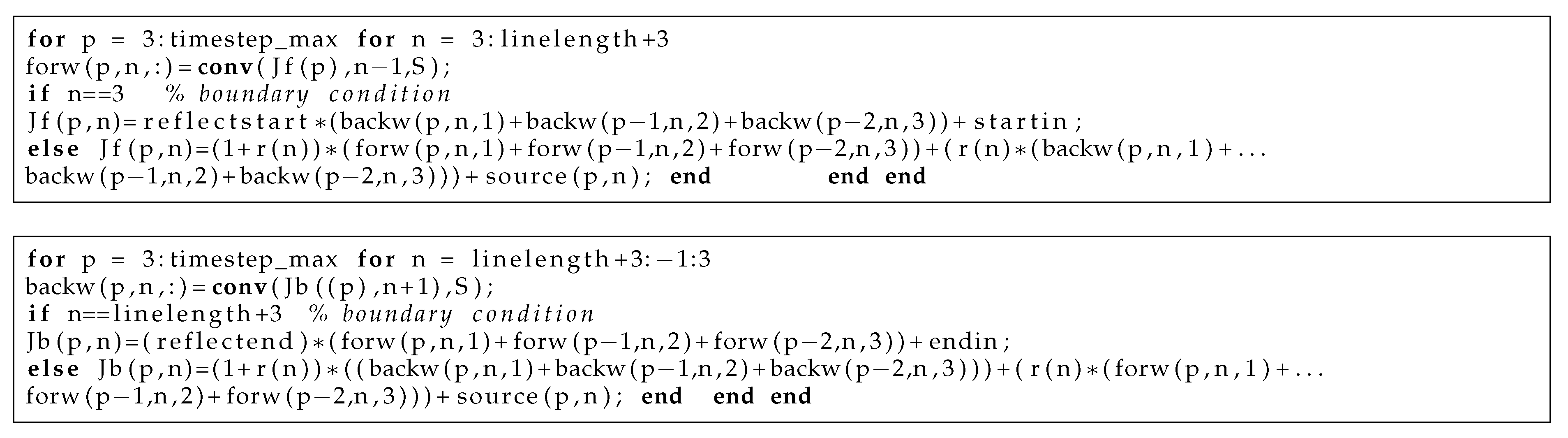
4. Calculating Impulse Responses Based on the Derived Reflection Coefficients
5. Case Studies
5.1. Single Line
5.1.1. Step 1: Layer Peeling
5.1.2. Step 2: Derivation of E
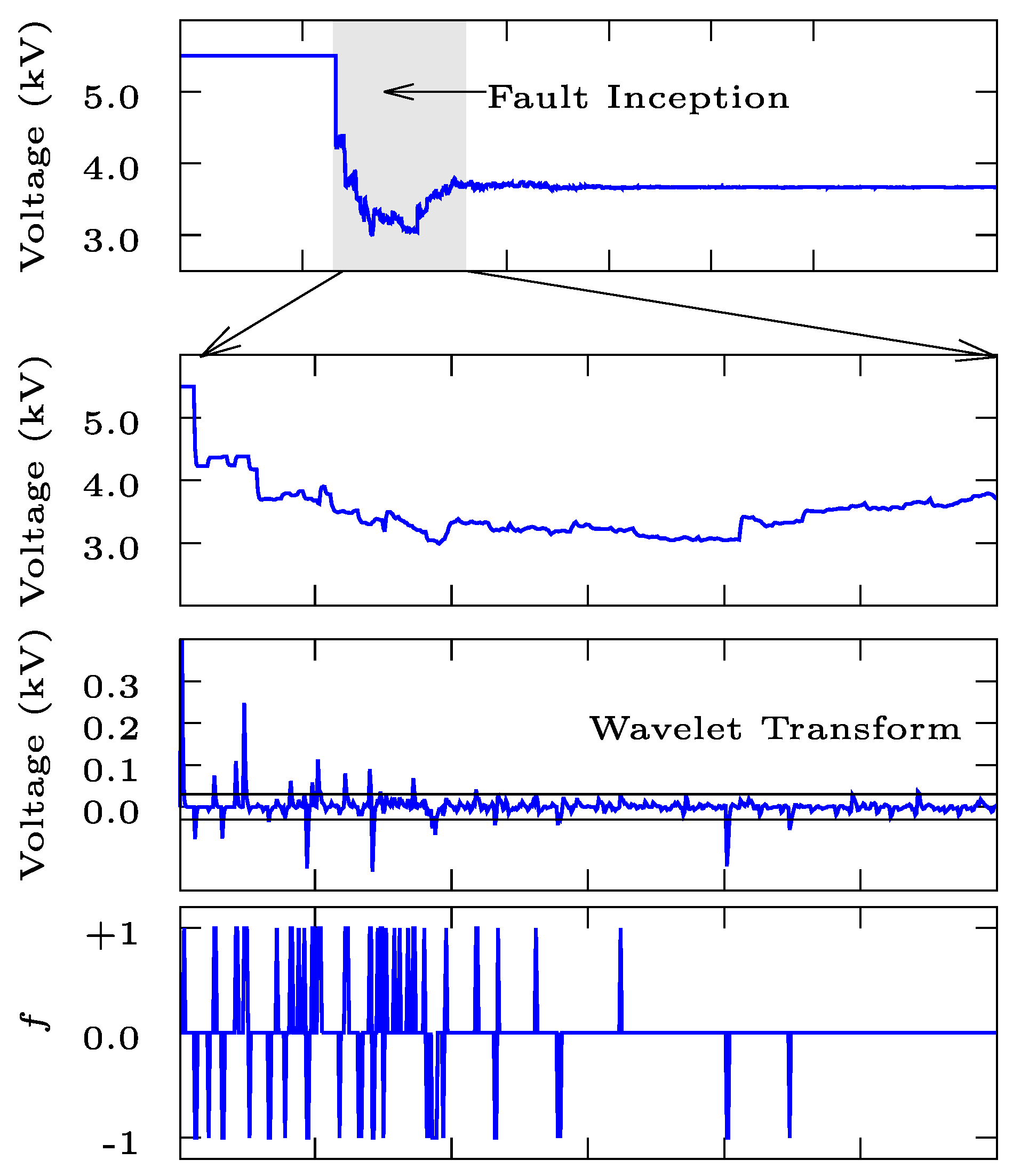
5.1.3. Step 3: Wavelet Transform of Fault Waveform
5.1.4. Step 4: Perform Correlation of E and f
6. Impact of Errors
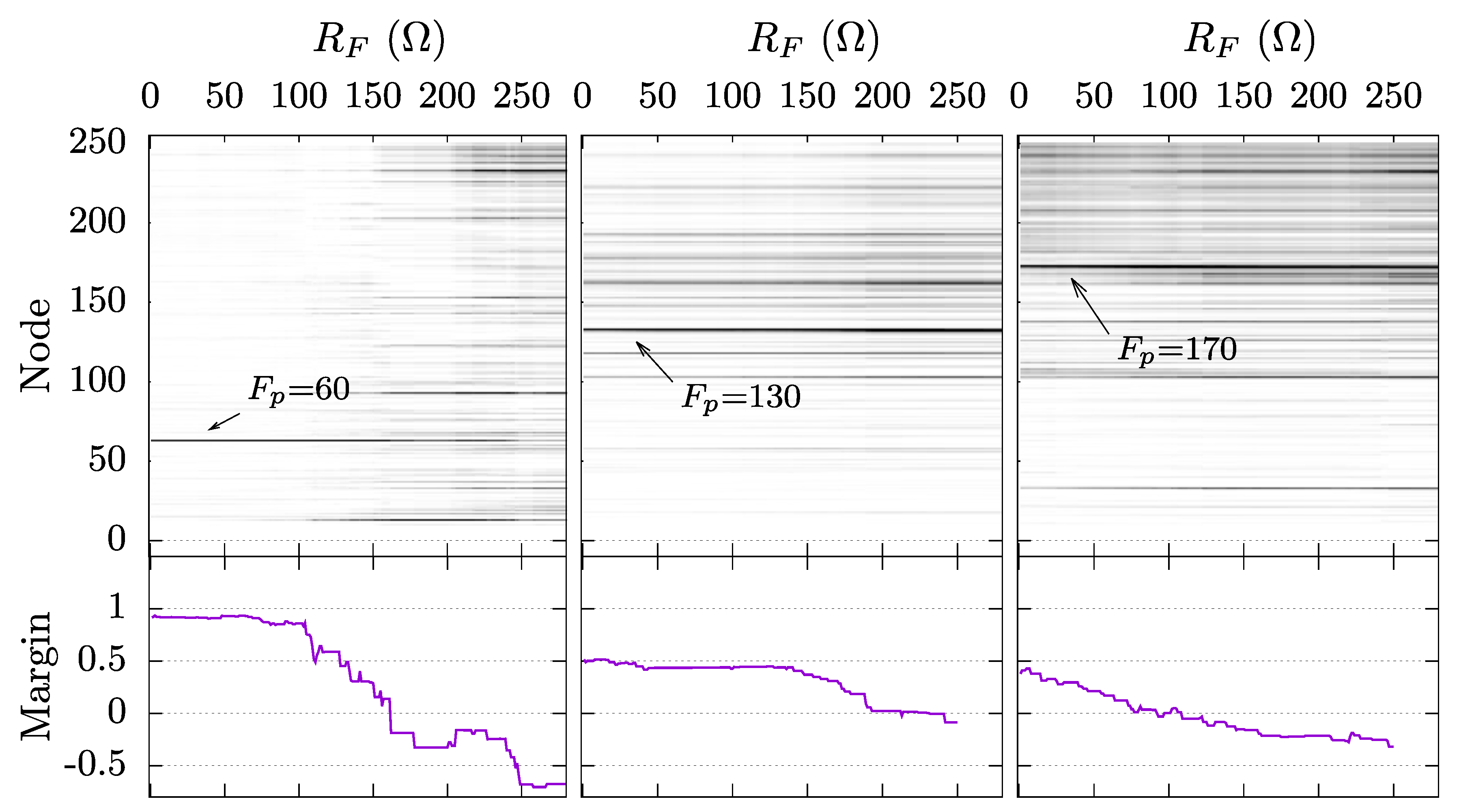
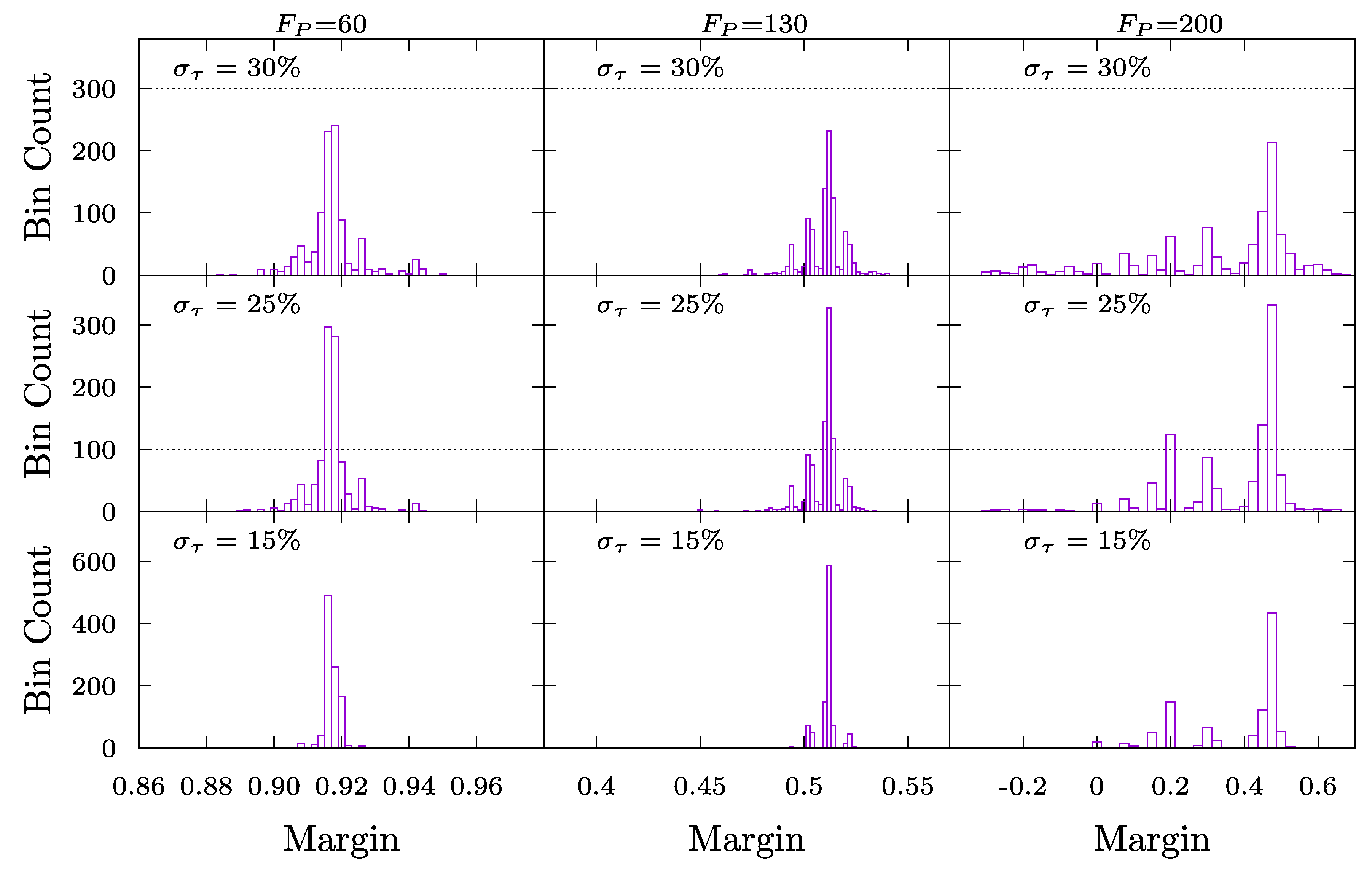
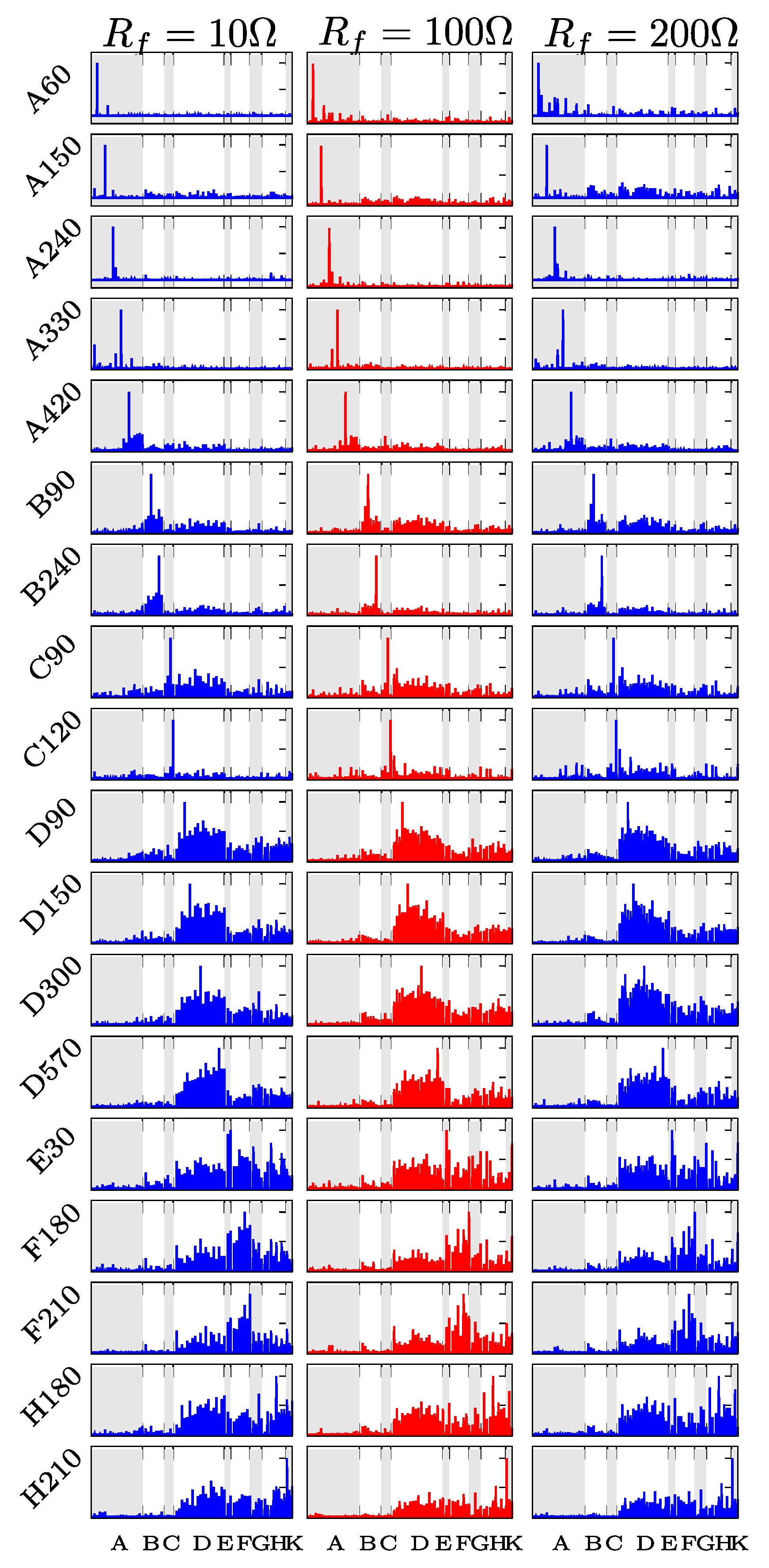
6.1. Effect of Fault Resistance,
6.2. Effect of Errors in the Magnitude of the Reflection Coefficients
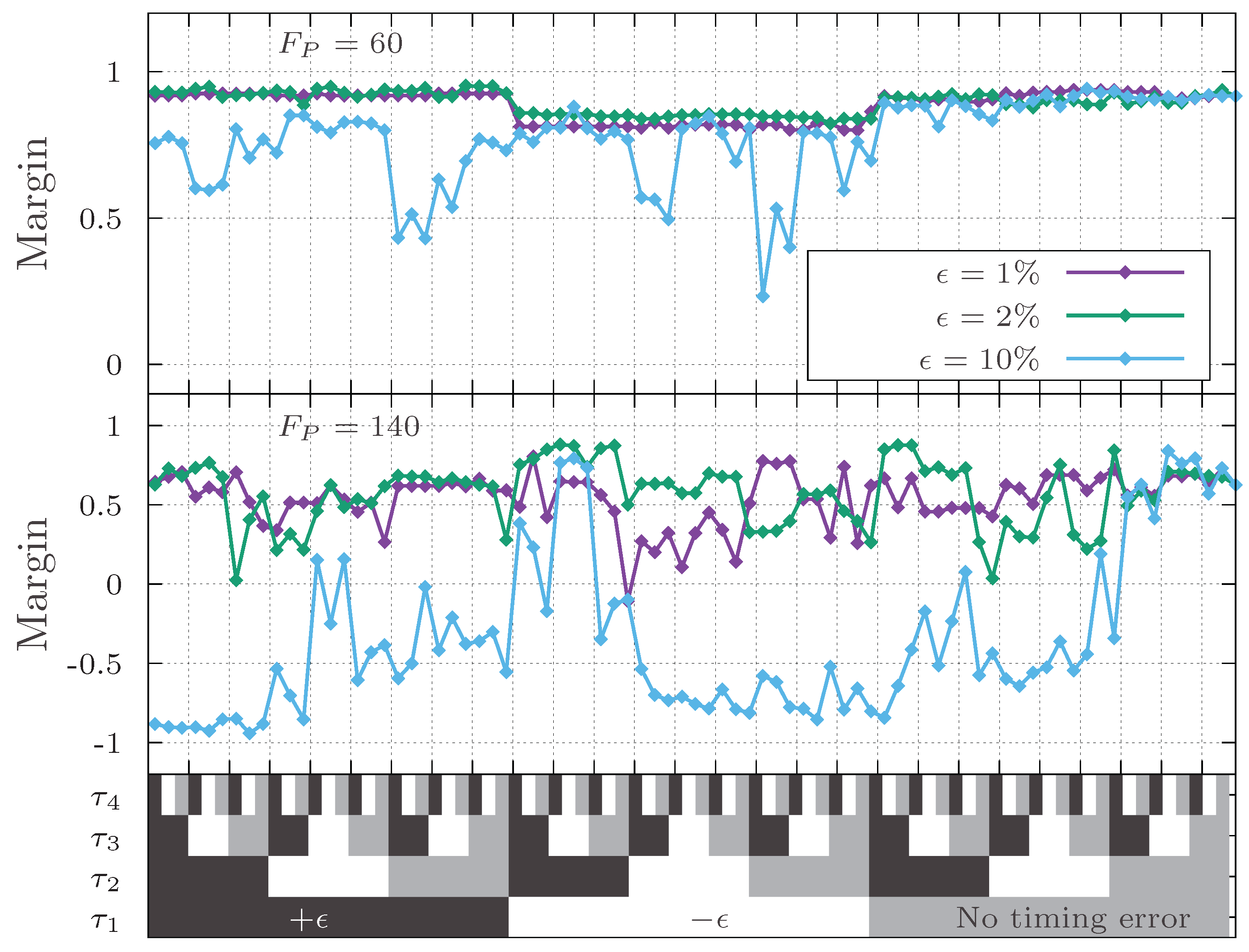
6.3. Robustness Against Timing Errors
7. Application of the Proposed Method on the IEEE 13-Bus Network
7.1. Network Modelling
- All lines are three-phase overhead as detailed in Table 1.
- The voltage regulator and shunt capacitors are omitted.
- Tapped transformers are represented by a lumped resistance of 600 , and placed arbitrarily around the network at a density approximating 1 transformer per 80 m.
7.2. General Performance
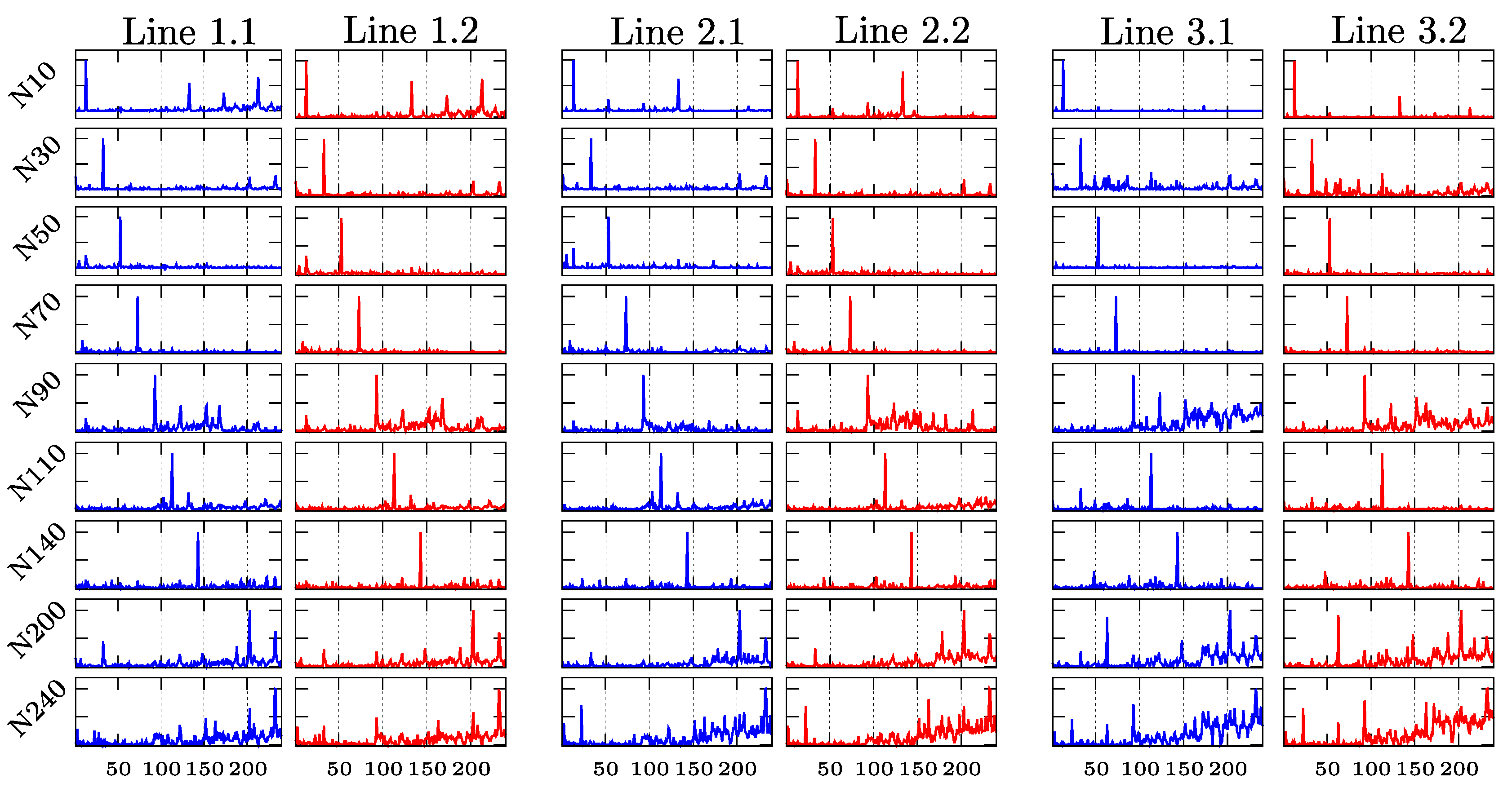
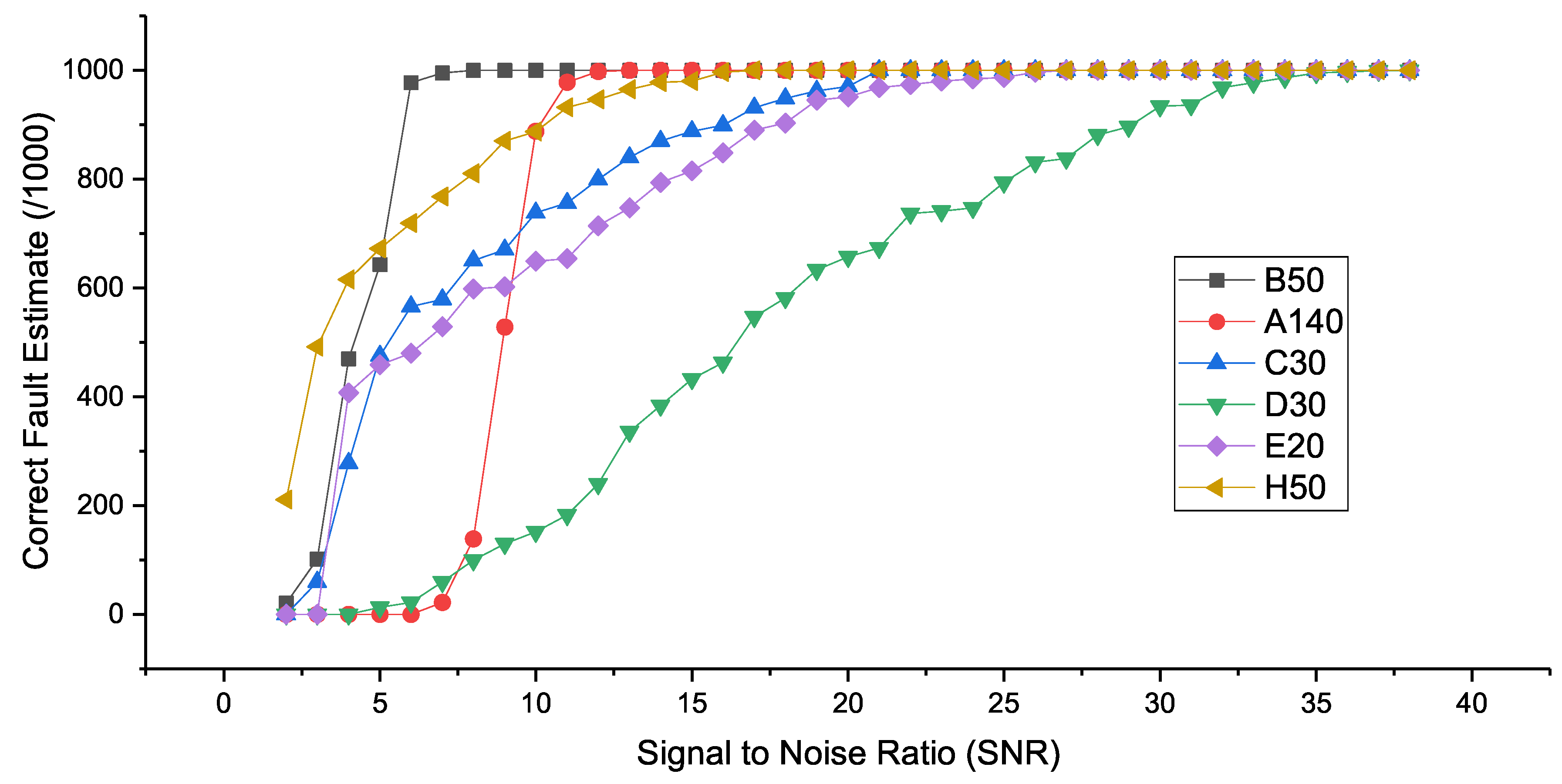
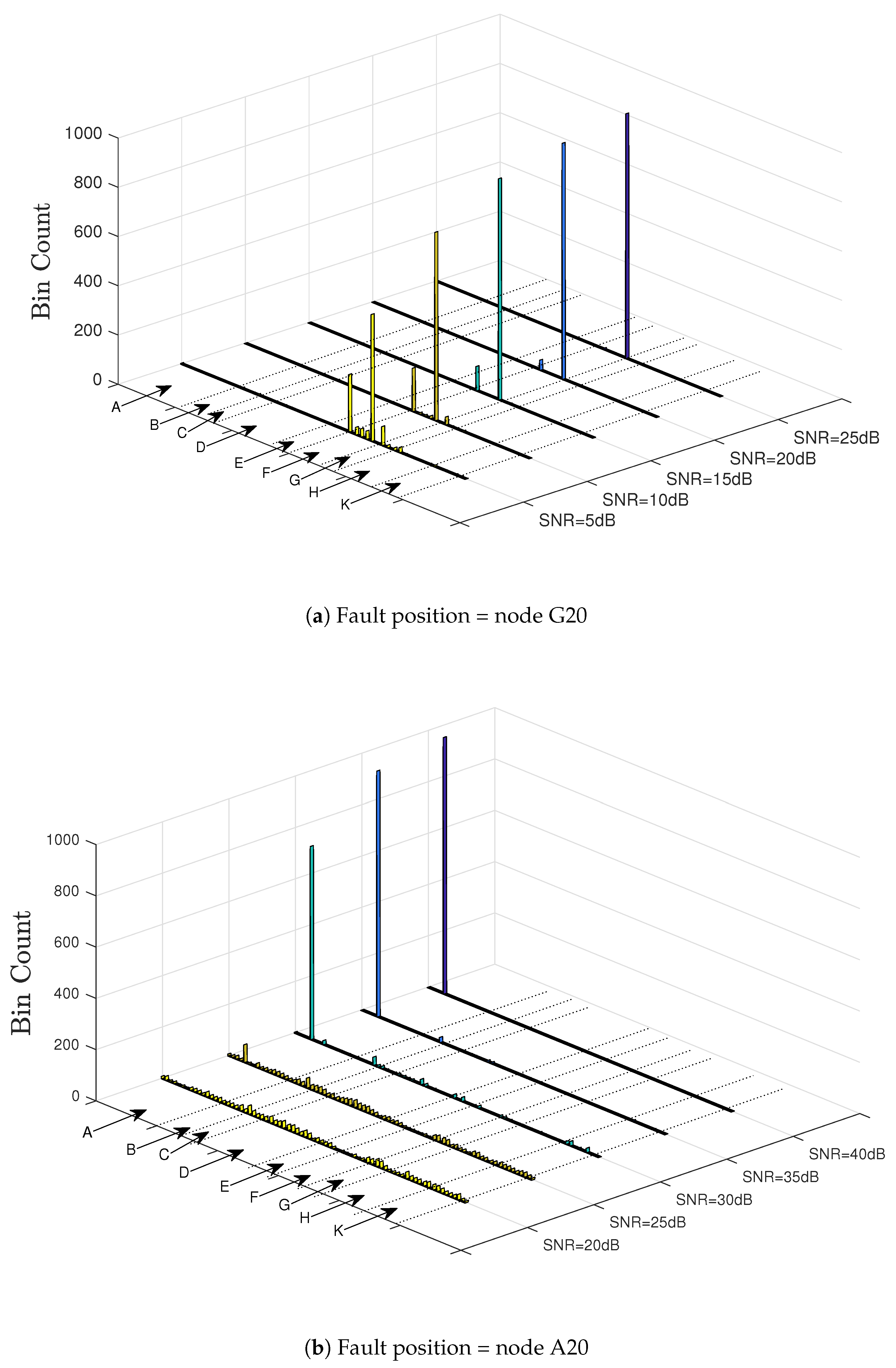
7.3. Performance in the Presence of Noise
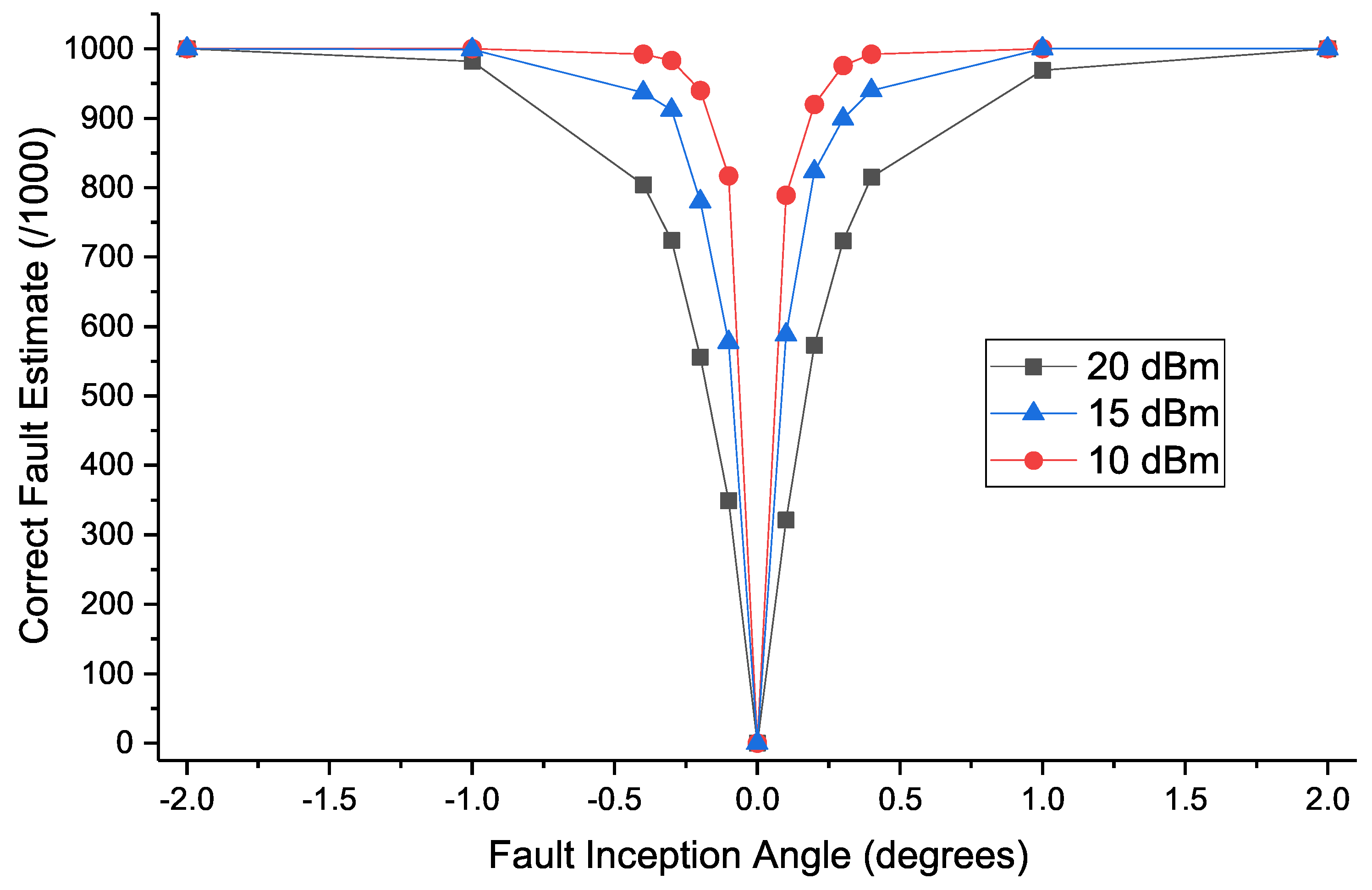
7.4. Effect of Fault Inception Angle
8. Practical Considerations
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lehtonen, M. Fault rates of different types of medium voltage power lines in different environments. In Proceedings of the 2010 Electric Power Quality and Supply Reliability Conference, Kuressaare, Estonia, 16–18 June 2010; pp. 197–202. [Google Scholar] [CrossRef]
- Das, S.; Santoso, S.; Gaikwad, A.; Patel, M. Impedance-based fault location in transmission networks: Theory and application. IEEE Access 2014, 2, 537–557. [Google Scholar] [CrossRef]
- Takagi, T.; Yamakoshi, Y.; Yamaura, M.; Kondow, R.; Matsushima, T. Development of a New Type Fault Locator Using the One-Terminal Voltage and Current Data. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 2892–2898. [Google Scholar] [CrossRef]
- Zimmerman, K.; Costello, D. Impedance-based fault location experience. In Proceedings of the 58th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 5–7 April 2005; pp. 211–226. [Google Scholar] [CrossRef]
- Eriksson, L.; Saha, M.M.; Rockefeller, G.D. An Accurate Fault Locator with Compensation For Apparent Reactance In The Fault Resistance Resulting From Remore-End Infeed. IEEE Trans. Power Appar. Syst. 1985, PAS-104, 423–436. [Google Scholar] [CrossRef]
- Girgis, A.A.; Hart, D.G.; Peterson, W.L. A new fault location technique for two- and three-terminal lines. IEEE Trans. Power Deliv. 1992, 7, 98–107. [Google Scholar] [CrossRef]
- Personal, E.; García, A.; Parejo, A.; Larios, D.F.; Biscarri, F.; León, C. A Comparison of Impedance-Based Fault Location Methods for Power Underground Distribution Systems. Energies 2016, 9, 1022. [Google Scholar] [CrossRef]
- Dashti, R.; Salehizadeh, S.M.; Shaker, H.R.; Tahavori, M. Fault Location in Double Circuit Medium Power Distribution Networks Using an Impedance-Based Method. Appl. Sci. 2018, 8, 1034. [Google Scholar] [CrossRef]
- Krishnathevar, R.; Ngu, E.E. Generalized Impedance-Based Fault Location for Distribution Systems. IEEE Trans. Power Deliv. 2012, 27, 449–451. [Google Scholar] [CrossRef]
- Salim, R.H.; Resener, M.; Filomena, A.D.; de Oliveira, K.R.C.; Bretas, A.S. Extended Fault-Location Formulation for Power Distribution Systems. IEEE Trans. Power Deliv. 2009, 24, 508–516. [Google Scholar] [CrossRef]
- Pignati, M.; Zanni, L.; Romano, P.; Cherkaoui, R.; Paolone, M. Fault Detection and Faulted Line Identification in Active Distribution Networks Using Synchrophasors-Based Real-Time State Estimation. IEEE Trans. Power Deliv. 2017, 32, 381–392. [Google Scholar] [CrossRef] [Green Version]
- Ren, J.; Venkata, S.S.; Sortomme, E. An Accurate Synchrophasor Based Fault Location Method for Emerging Distribution Systems. IEEE Trans. Power Deliv. 2014, 29, 297–298. [Google Scholar] [CrossRef]
- Crossley, P.A.; McLaren, P.G. Distance Protection Based on Travelling Waves. IEEE Trans. Power Appar. Syst. 1983, PAS-102, 2971–2983. [Google Scholar] [CrossRef]
- Robson, S.; Haddad, A.; Griffiths, H. Fault Location on Branched Networks Using a Multiended Approach. IEEE Trans. Power Deliv. 2014, 29, 1955–1963. [Google Scholar] [CrossRef]
- Razzaghi, R.; Lugrin, G.; Manesh, H.; Romero, C.; Paolone, M.; Rachidi, F. An Efficient Method Based on the Electromagnetic Time Reversal to Locate Faults in Power Networks. IEEE Trans. Power Deliv. 2013, 28, 1663–1673. [Google Scholar] [CrossRef] [Green Version]
- Evrenosoglu, C.Y.; Abur, A. Travelling wave based fault location for teed circuits. IEEE Trans. Power Deliv. 2005, 20, 1115–1121. [Google Scholar] [CrossRef]
- Magnago, F.H.; Abur, A. Fault location using wavelets. IEEE Trans. Power Deliv. 1998, 13, 1475–1480. [Google Scholar] [CrossRef]
- Jafarian, P.; Sanaye-Pasand, M. A Traveling-Wave-Based Protection Technique Using Wavelet/PCA Analysis. IEEE Trans. Power Deliv. 2010, 25, 588–599. [Google Scholar] [CrossRef]
- Kim, C.H.; Kim, H.; Ko, Y.H.; Byun, S.H.; Aggarwal, R.K.; Johns, A.T. A novel fault-detection technique of high-impedance arcing faults in transmission lines using the wavelet transform. IEEE Trans. Power Deliv. 2002, 17, 921–929. [Google Scholar] [CrossRef]
- Santoso, S.; Powers, E.J.; Grady, W.M.; Hofmann, P. Power quality assessment via wavelet transform analysis. IEEE Trans. Power Deliv. 1996, 11, 924–930. [Google Scholar] [CrossRef]
- Chen, K.; Huang, C.; He, J. Fault detection, classification and location for transmission lines and distribution systems: A review on the methods. High Volt. 2016, 1, 25–33. [Google Scholar] [CrossRef]
- Trindade, F.C.L.; Freitas, W.; Vieira, J.C.M. Fault Location in Distribution Systems Based on Smart Feeder Meters. IEEE Trans. Power Deliv. 2014, 29, 251–260. [Google Scholar] [CrossRef]
- Majidi, M.; Etezadi-Amoli, M.; Fadali, M.S. A Sparse-Data-Driven Approach for Fault Location in Transmission Networks. IEEE Trans. Smart Grid 2017, 8, 548–556. [Google Scholar] [CrossRef]
- Majidi, M.; Etezadi-Amoli, M. A New Fault Location Technique in Smart Distribution Networks Using Synchronized/Nonsynchronized Measurements. IEEE Trans. Power Deliv. 2018, 33, 1358–1368. [Google Scholar] [CrossRef]
- Pavlatos, C.; Vita, V.; Dimopoulos, A.C.; Ekonomou, L. Transmission lines’ fault detection using syntactic pattern recognition. Energy Syst. 2018. [Google Scholar] [CrossRef]
- Mao, X.j.; Qian, J.d. The “peeling” method to process apparent resistivity data for earthquake precursory monitoring. Acta Seismol. Sin. 2001, 14, 685–691. [Google Scholar] [CrossRef]
- Koltracht, I.; Lancaster, P. Threshold algorithms for the prediction of reflection coefficients in a layered medium. Geophysics 1988, 53, 908–919. [Google Scholar] [CrossRef]
- Schur, J. Über Potenzreihen, die im Innern des Einheitskreises beschränkt sind. Journal Für Die Reine Und Angewandte Mathematik 1917, 147, 205–232. [Google Scholar]
- Artale, G.; Cataliotti, A.; Cosentino, V.; Cara, D.D.; Fiorelli, R.; Guaiana, S.; Tinè, G. A New Low Cost Coupling System for Power Line Communication on Medium Voltage Smart Grids. IEEE Trans. Smart Grid 2018, 9, 3321–3329. [Google Scholar] [CrossRef]
- Yan, F.; Ge, T.-L.; Zhao, H.-S. A New Method of Single-Phase-to-Earth Fault Location for Rural MV Power Networks. In Proceedings of the 2008 Joint International Conference on Power System Technology and IEEE Power India Conference, New Delhi, India, 12–15 October 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Borghetti, A.; Bosetti, M.; Silvestro, M.D.; Nucci, C.A.; Paolone, M. Continuous-Wavelet Transform for Fault Location in Distribution Power Networks: Definition of Mother Wavelets Inferred From Fault Originated Transients. IEEE Trans. Power Syst. 2008, 23, 380–388. [Google Scholar] [CrossRef] [Green Version]
- Guzmán, A.; Kasztenny, B.; Tong, Y.; Mynam, M.V. Accurate and economical traveling-wave fault locating without communications. In Proceedings of the 2018 71st Annual Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 26–29 March 2018; pp. 1–18. [Google Scholar] [CrossRef]
- Schweitzer, E.O.; Guzmán, A.; Mynam, M.V.; Skendzic, V.; Kasztenny, B.; Marx, S. Locating faults by the traveling waves they launch. In Proceedings of the 2014 67th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 31 March–3 April 2014; pp. 95–110. [Google Scholar] [CrossRef]
- Wilkinson, W.A.; Cox, M.D. Discrete wavelet analysis of power system transients. IEEE Trans. Power Syst. 1996, 11, 2038–2044. [Google Scholar] [CrossRef]
- Bruckstein, A.M.; Kailath, T. Inverse Scattering for Discrete Transmission-Line Models. SIAM Rev. 1987, 29, 359–389. [Google Scholar] [CrossRef]
- Marti, J. Accurate Modelling of Frequency-Dependent Transmission Lines in Electromagnetic Transient Simulations. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 147–157. [Google Scholar] [CrossRef]
- Snelson, J.K. Propagation of Travelling Waves on Transmission Lines—Frequency Dependent Parameters. IEEE Trans. Power Appar. Syst. 1972, PAS-91, 85–91. [Google Scholar] [CrossRef]
- Kersting, W.H. Radial distribution test feeders. IEEE Trans. Power Syst. 1991, 6, 975–985. [Google Scholar] [CrossRef]
- Costa, F.B.; Souza, B.A.; Brito, N.S.D. Effects of the fault inception angle in fault-induced transients. IET Gener. Transm. Distrib. 2012, 6, 463–471. [Google Scholar] [CrossRef]
- Tao, Z.; Xiaoxian, Y.; Baohui, Z.; Jian, C.; Zhi, Y.; Zhihong, T. Research of Noise Characteristics for 10-kV Medium-Voltage Power Lines. IEEE Trans. Power Deliv. 2007, 22, 142–150. [Google Scholar] [CrossRef]
- Amirshahi, P.; Kavehrad, M. High-frequency characteristics of overhead multiconductor power lines for broadband communications. IEEE J. Sel. Areas Commun. 2006, 24, 1292–1303. [Google Scholar] [CrossRef]
- Robson, S.; Haddad, A.; Griffiths, H. A New Methodology for Network Scale Simulation of Emerging Power Line Communication Standards. IEEE Trans. Power Deliv. 2018, 33, 1025–1034. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 11 kV Wood Pole Overhead Line | |
| Height, h | 9 m |
| Height at mid-span, | 7.5 m |
| Conductor separation, d | 1.5 m |
| Conductor name | Dingo |
| Conductor core area | 158.7 mm2 |
| Conductor resistivity | 0.1814 /km DC |
| Earth resistivity | 100 ·m |
| EMTP Simulation Parameters | |
| Sampling Frequency | 100 MHz |
| Pulse Width for TDR | s |
| Line | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Actual | Calculated | (%) | Actual | Calculated | (%) | Actual | Calculated | (%) | Actual | Calculated | (%) | ||
| 1.1 | −0.1721 | −0.1719 | −0.12 | −0.1721 | −0.1650 | −4.3 | |||||||
| 700 | 699.2 | 700 | 671.1 | ||||||||||
| 1.2 | −0.2260 | −0.2241 | −0.58 | −0.1274 | −0.1347 | +5.7 | |||||||
| 500 | 495.8 | 1000 | 1057.3 | ||||||||||
| 2.1 | −0.1721 | −0.1719 | −0.12 | −0.1721 | −0.1650 | −4.3 | −0.1721 | −0.1627 | −5.8 | ||||
| 700 | 699.2 | 700 | 671.1 | 700 | 661.8 | ||||||||
| 2.2 | −0.2674 | −0.2664 | −0.38 | −0.1172 | −0.1119 | −4.74 | −0.2260 | −0.2095 | −7.9 | ||||
| 400 | 398.5 | 1100 | 1050.3 | 500 | 463.5 | ||||||||
| 3.1 | −0.1721 | −0.1719 | −0.12 | −0.1721 | −0.1650 | −4.3 | −0.1721 | −0.1627 | −5.8 | −0.1721 | −0.1695 | −1.51 | |
| 700 | 699.2 | 700 | 671.1 | 700 | 661.8 | 700 | 693.5 | ||||||
| 3.2 | −0.1543 | −0.1537 | −0.39 | −0.2260 | −0.2161 | −4.6 | −0.3274 | −0.3055 | −7.2 | −0.1172 | −0.1099 | −6.64 | |
| 800 | 796.9 | 500 | 478.1 | 300 | 279.9 | 1100 | 1031.5 | ||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Robson, S.; Haddad, A.; Griffiths, H. Traveling Wave Fault Location Using Layer Peeling. Energies 2019, 12, 126. https://doi.org/10.3390/en12010126
Robson S, Haddad A, Griffiths H. Traveling Wave Fault Location Using Layer Peeling. Energies. 2019; 12(1):126. https://doi.org/10.3390/en12010126
Chicago/Turabian StyleRobson, Stephen, Abderrahmane Haddad, and Huw Griffiths. 2019. "Traveling Wave Fault Location Using Layer Peeling" Energies 12, no. 1: 126. https://doi.org/10.3390/en12010126
APA StyleRobson, S., Haddad, A., & Griffiths, H. (2019). Traveling Wave Fault Location Using Layer Peeling. Energies, 12(1), 126. https://doi.org/10.3390/en12010126