AC “Back to Back” Switching Device in Industrial Application †


Abstract
:1. Introduction
2. An Overview on SCR and Its Application
- ⮚
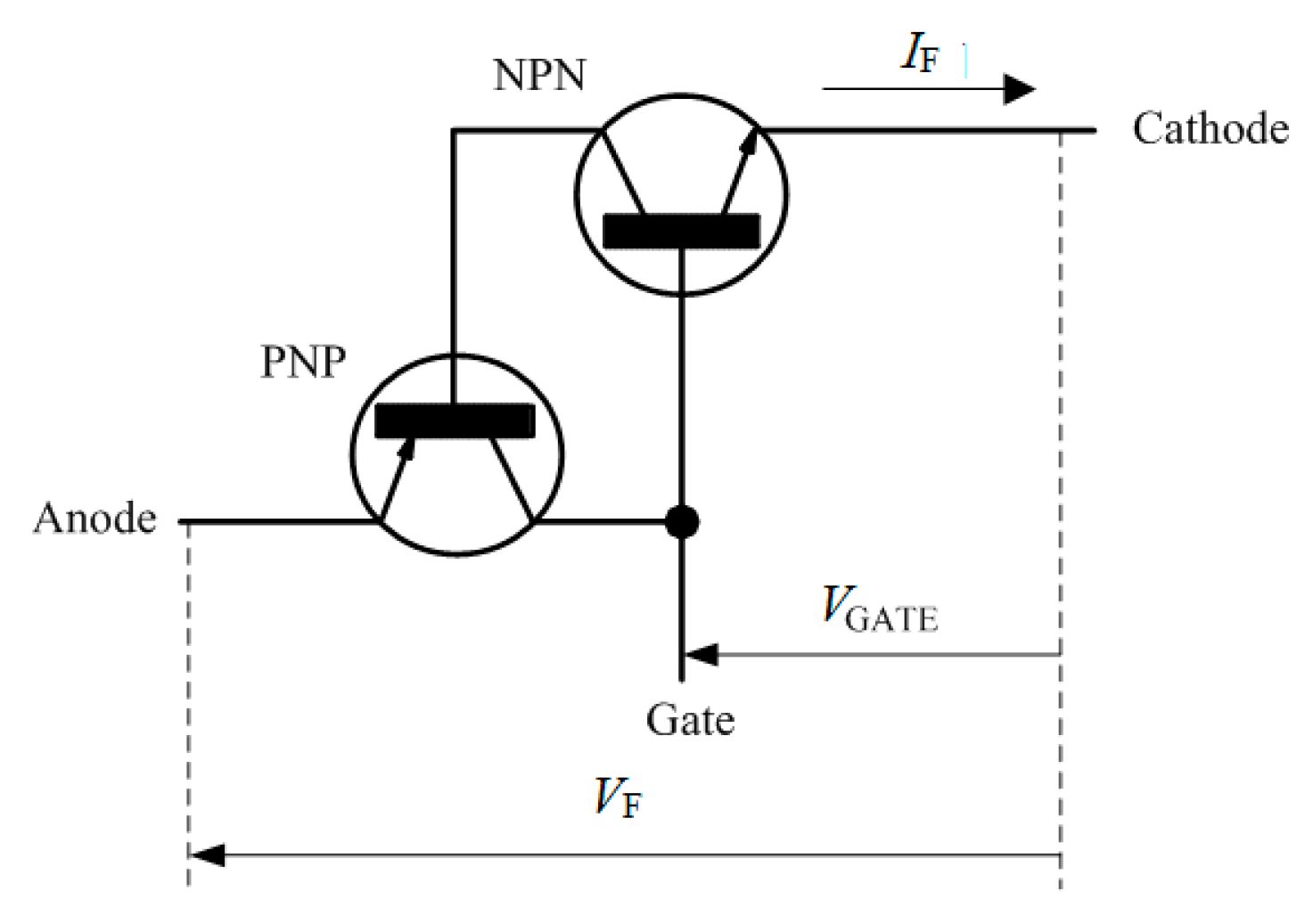
- an appropriate gate to cathode voltage (VGATE) is needed to turn on the device while the SCR is forward biased;
- ⮚
- gate signal shall be removed after the device under test is turned on in order to reduce the losses and avoid higher junction temperature;
- ⮚
- while the device is in reverse biased conditions, no VGATE signal should be applied;
- ⮚
- when the device is in-off state, negative VGATE should be applied to improve the performance of the under-test device.
- ⮚
- Planar type: Typically used for low current devices because the junctions are obtained by diffusion and come to the same surface on the cathode side. The ratio silicon/ampere is typically high;
- ⮚
- Mesa type: It is used for high current devices but low di/dt ratio. Power SCRs are typically manufactured by this process;
- ⮚
- Press pack type: Widely used in applications where it is necessary to have SCR with center gate and large value of di/dt.
3. Problem Formulation: General and Practical Discussions
3.1. General Discusion
- ⮚
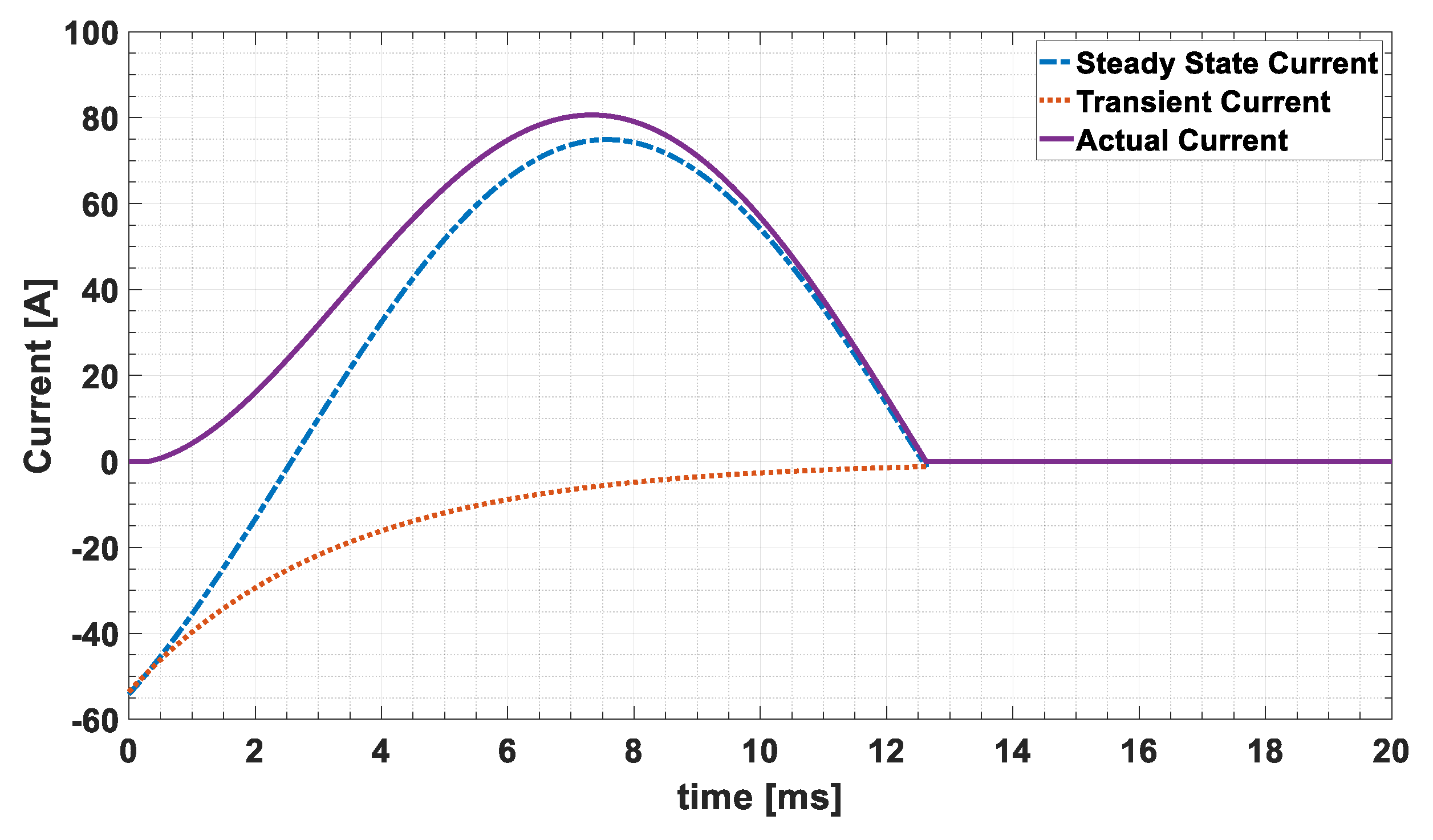
- i(t) is the sum of a regimen term (first term) and a transient one (second term), which depends on time constant τ equal to L/R;
- ⮚
- V is the rms voltage value applied by the voltage source, v(t);
- ⮚
- Z is the load impedance;
- ⮚
- α is the control phase angle evaluated starting from the voltage zero crossing and it can be managed by the gate driver circuit often triggered through a supervisory microcontroller.
3.2. Detail and Practical Discussions
- Supply voltage variation: applied voltage magnitude has linear effect on minimum pulse duration. For standard European voltage of 230 V RMS, this dependency is shown in Figure 8a with ±10% variation around nominal value in compliance with the international standard IEC 50160. It can be noticed that voltage variation has minor effect on minimum pulse time duration;
- Impedance variation:Figure 8b shows the load impedance variation on the minimum pulse time duration with constant φ and V. The variation range is ±50%. An increase in Z means a lower current and a decrease in Z means a higher current. Therefore, it can be seen that, by increasing the load, the minimum pulse time duration required will increase, and with lower load current, wider pulses are required to guarantee the conduction;
- Load power angle variation: with fixed Z and V, effect of load power angle variation has been studied. Figure 8c shows the effect of this variation on minimum pulse duration while the load changes from more resistive to more inductive absorbing the same RMS current. The variation range also in this case is ±50%. It can be seen that increasing the load power angle will cause increase in minimum pulse duration time. More inductive load needs pulses with longer width or in other word, with more resistive load the required pulse width for conduction become shorter;
- Resistance variation:Figure 8d shows the effect of varying load resistance variation on minimum pulse time (t) required, with constants L and V. The variation range also in this case is ±50%. It can be noticed that increasing or decreasing the load resistance does not significantly influence the pulse duration. Therefore, it can be seen from Figure 8d that the variation in resistance doesn’t have a major influence on the required pulse duration;
- Inductance variation:Figure 8e shows the effect of varying load inductance on minimum required pulse time (t), with R and V as constant values. The variation range is once again ±50%. Increasing the load inductance results in lower load current and vice versa. Hence, it can be noticed that by increasing the load inductance the minimum pulse duration needed will also increase. An aspect to note is that the variation in inductance is of very important with respect to the other parameters considered.
4. SCR Driver Circuits, Simulation and Experimental Results
4.1. Driver Circuit 1
4.2. Driver Circuit 2
4.3. Driver Circuit Losses Comparison
4.4. Driver Conduction Delay Comparison
- a
- SCR Driver 1 and
- b
- SCR Driver 2;
- I
- gate pulse,
- II
- series of gate pulses,
- III
- constant gate signal.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Isermann, R. Towards intelligent control of mechanical processes. In Control Engineering Practice; Elsevier: Delft, The Netherlands, 1993; Volume 1, pp. 233–252. ISSN 0967-0661. [Google Scholar]
- Tan, K.K.; Tang, K.Z.; Dou, H.F.; Huang, S.N. Development of an integrated and open-architecture precision motion control system. Control. Eng. Pract. 2002, 10, 757–772. [Google Scholar] [CrossRef]
- Godse, A.P.; Bakshi, U.A. Basic Electrical and Electronics Engineering; Technical Publications: Pune, India, 2007; ISBN 8184312733. [Google Scholar]
- Huang, A.Q. Power Semiconductor Devices for Smart Grid and Renewable Energy Systems. Proc. IEEE 2017, 105, 2019–2047. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Romero-Troncoso, R.d.J.; Herrera-Ruiz, G.; Castañeda-Miranda, R. The application of reconfigurable logic to high speed CNC milling machines controllers. Control Eng. Pract. 2008, 16, 674–684. [Google Scholar] [CrossRef]
- Charbonnaud, P.; Carrillo, F.J.; Ladevèze, D. Monitored robust force control of a milling process. Control Eng. Practice 2001, 9, 1047–1061. [Google Scholar] [CrossRef]
- Naso, D.; Cupertino, F.; Turchiano, B. Precise position control of tubular linear motors with neural networks and composite learning. Control Eng. Practice 2010, 18, 515–522. [Google Scholar] [CrossRef]
- Faranda, R.; Lazzaroni, M. Industrial low cost temperature measurement in permanent electro-magnetic platens. Measurement 2012. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.; Yan, K.; Fu, Y.; Zhang, C. Analysis of static VAr compensators installed in different positions in electric railways. IET Electr. Syst. Transp. 2015, 5, 129–134. [Google Scholar] [CrossRef]
- Singh, B.; Saha, R.; Chandra, A.; Al-Haddad, K. Static synchronous compensators (STATCOM): A review. IET Power Electron. 2009, 2, 297–324. [Google Scholar] [CrossRef]
- Liu, L.; Zhuang, J.; Wang, C.; Jiang, Z.; Wu, J.; Chen, B. A Hybrid DC Vacuum Circuit Breaker for Medium Voltage: Principle and First Measurements. IEEE Trans. Power Deliv. 2015, 30, 2096–2101. [Google Scholar] [CrossRef]
- Raonic, D.M. SCR self-supplied gate driver for medium-voltage application with capacitor as storage element. IEEE Trans. Ind. Appl. 2000, 36, 212–216. [Google Scholar] [CrossRef]
- Patel, Y.P. Mitigation of the Effects of Common-Mode Current on the Operation of SCR-Based Rectifiers for AC Drives. IEEE Trans. Ind. Appl. 2016, 52, 4827–4834. [Google Scholar] [CrossRef]
- Eltamaly, A.M. Harmonic injection scheme for harmonic reduction of three-phase controlled converters. IET Power Electron. 2018, 11, 110–119. [Google Scholar] [CrossRef]
- Chen, J.T.; Ker, M.D. ESD Protection Design with Diode-Triggered Quad-SCR for Separated Power Domains. IEEE Trans. Device Mater. Reliab. 2019, 19, 283–289. [Google Scholar] [CrossRef]
- Liu, W.; Liou, J.J.; Yeh, H.C.; Wang, H.; Li, Y.; Yeo, K.S. Bidirectional diode-triggered silicon-controlled rectifiers for low-voltage ESD protection. IEEE Electron Device Lett. 2012, 33, 1360–1362. [Google Scholar] [CrossRef]
- Junxiong, G.; Jizhi, L.; Rui, T.; Liu, Z.; Zhiwei, L. Novel Diode-Triggered Silicon-Controlled Rectifier (DTSCR) for High-Temperature Low-Voltage Electrostatic Discharge (ESD) Applications. In Proceedings of the 2016 IEEE International Nanoelectronics Conference (INEC), Chengdu, China, 9–11 May 2016; pp. 1–2. [Google Scholar] [CrossRef]
- D’Antona, G.; Faranda, R.; Hafezi, H.; Accetta, G.; Della Giustina, D. Open UPQC: A possible solution for customer power quality improvement. Shunt unit analysis. In Proceedings of the Harmonics and Quality of Power (ICHQP), 2014 IEEE 16th International Conference, Bucharest, Romania, 25–28 May 2014; pp. 596–600. [Google Scholar]
- D’Antona, G.; Faranda, R.; Hafezi, H.; Accetta, G.; della Giustina, D. Open UPQC: A possible solution for power quality. Series unit analysis. In Proceedings of the Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), 2014 International Symposium, Ischia, Italy, 18–20 June 2014; pp. 1104–1109. [Google Scholar]
- D’Antona, G.; Faranda, R.; Hafezi, H.; Bugliesi, M. Experiment on Bidirectional Single Phase Converter Applying Model Predictive Current Controller. Energies 2016, 9, 233. [Google Scholar] [CrossRef] [Green Version]
- Govindhasamy, J.J.; McLoone, S.F.; Irwin, G.W.; French, J.J.; Doyle, R.P. Neural modelling, control and optimisation of an industrial grinding process. Control Eng. Practice 2005, 13, 1243–1258. [Google Scholar] [CrossRef] [Green Version]
- Abele, E.; Altintas, Y.; Brecher, C. Machine tool spindle units. CIRP Ann. Manuf. Technol. 2010, 59, 781–802. [Google Scholar] [CrossRef]
- Cardone, M.; Cosmai, G.; Faranda, R.; Giglio, A. Modular Magnetic Device for Clamping Ferromagnetic Workpieces. U.S. Patent 8,957,750, 21 August 2014. [Google Scholar]
- Faranda, R.; Hafezi, H.; Karakasli, V.; Ingrao, M.; Lazzaroni, M. AC "Back to Back" Switching Protection in Inductive Application. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Bakshi, U.A.; Godse, A.P. Elements of Electronics Engineering; Technical Publications: Pune, India, 2008; p. 476. ISBN 818431292X. [Google Scholar]
- Lee, T.-S.; Lin, C.-H.; Lin, F.-J. An adaptive H∞ controller design for permanent magnet synchronous motor drives. Control Eng. Practice 2005, 13, 425–439. [Google Scholar] [CrossRef]
- Yousefi, H.; Hirvonen, M.; Handroos, H.; Soleymani, A. Application of neural network in suppressing mechanical vibration of a permanent magnet linear motor. Control Eng. Practice 2008, 16, 787–797. [Google Scholar] [CrossRef]
- Zhao, S.; Tan, K.K. Adaptive feedforward compensation of force ripples in linear motors. Control Eng. Practice 2005, 13, 1081–1092. [Google Scholar] [CrossRef]
- Wu, D.; Chen, K. Design and Analysis of Precision Active Disturbance Rejection Control for Noncircular Turning Process. IEEE Trans. Ind. Electron. 2009, 56, 2746–2753. [Google Scholar]
- Yang, Y.; Gao, F. Adaptive control of the filling velocity of thermoplastics injection molding. Control Eng. Practice 2000, 8, 1285–1296. [Google Scholar] [CrossRef]
- Konrad, H. Fault detection in milling, using parameter estimation and classification methods. Control Eng. Practice 1996, 4, 1573–1578. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Lin, S.-C.; Wang, T.-Y.; Teng, F.J. Stochastic model reference predictive temperature control with integral action for an industrial oil-cooling process. Control Eng. Practice 2009, 17, 302–310. [Google Scholar] [CrossRef]
- Sánchez, R.; Aisa, J.; Martinez, A.; Mercado, D. On the relationship between cooling setup and warpage in injection molding. Measurement 2012, 45, 1051–1056. [Google Scholar] [CrossRef]
- Cardone, M.; Faranda, R.; Giglio, A.; Foglia, G.; Moroni, E. Safety Device in Magnetic Locking System for Moulds; MACPLAS International (Technical Magazine for the Plastics and the Rubber Industry); Promaplast Srl: Assago, Italy, 2006; pp. 31–34. ISSN 0394-3453. [Google Scholar]
- Faranda, R.; Dezza, F.C.; Mazzucco, I.; Redi, P.; Tironi, E. An interface converter for DG/storage system able to improve Power Quality of the load. In Proceedings of the IEEE Power Engineering Society PES, Montreal, QC, Canada, 18–22 June 2006. [Google Scholar]
- Hafezi, H.; Faranda, R. Power quality and custom power: Seeking for a common solution in LV distribution network. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017. [Google Scholar]
- IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. In IEEE Std 519-2014 (Revision of IEEE Std 519-1992); June 2014. [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Manufacturer | IF (A) | VR (V) | IH (A) | IL (A) |
|---|---|---|---|---|---|
| VSK135 | Vishay | 135 | 1600 | 0.2 | 0.4 |
| VSK142 | Vishay | 140 | 1600 | 0.2 | 0.4 |
| VSK162 | Vishay | 160 | 1600 | 0.2 | 0.4 |
| SKKT132/16 | Semikron | 220 | 1600 | 0.15 | 0.3 |
| SKKT162/16 | Semikron | 250 | 1600 | 0.15 | 0.3 |
| SK45KQ16 | Semikron | 46 | 1600 | 0.08 (a) | 0.15 (a) |
| SK70KQ16 | Semikron | 71 | 1600 | 0.1 (b) | 0.2 (b) |
| TN25 | ST | 25 | 1000 | 0.05 (b) | 0.09 (b) |
| TN12 | ST | 12 | 1000 | 0.005 (b) | 0.006 (b) |
| PO10 | ST | 0.8 | 600 | 0.2 | 0.006 (b) |
| α [ms] | Minimum tpulse [μs] | Injection Problem with a tpulse = 200 μs |
|---|---|---|
| 0 | 671 | X |
| 0.2 | 500 | X |
| 0.4 | 379 | X |
| 0.6 | 298 | X |
| 0.8 | 243 | X |
| 1 | 204 | X |
| 2 | 114 | / |
| 3 | 84 | / |
| 4 | 72 | / |
| 5 | 69 | / |
| 6 | 72 | / |
| 7 | 86 | / |
| 8 | 120 | / |
| 9 | 257 | X |
| Ic max (A) | Ic min (A) | Ic ave (A) | VDC (V) | Losses (W) | |
|---|---|---|---|---|---|
| Driver 1 | 0.658 | 0 | 0.041 | 14.75 | 0.605 |
| Driver 2 | 0.031 | 0.031 | 0.031 | 14.75 | 0.457 |
| α ms | Reference Value | R = 1.5 Ω +50% | L = 75 mH +50% | Vmin = 207 V −10% | Injection Problem with a tpulse of 200 μs | |||
|---|---|---|---|---|---|---|---|---|
| Minimum tpulse μs | Minimum tpulse μs | Variation % | Minimum tpulse μs | Variation % | Minimum tpulse μs | Variation % | ||
| 0 | 628 | 629 | 0.2 | 770 | 22.6 | 663 | 5.6 | X |
| 0.2 | 460 | 460 | 0.0 | 670 | 45.6 | 492 | 6.9 | X |
| 0.4 | 345 | 346 | 0.3 | 468 | 35.6 | 375 | 8.7 | X |
| 0.8 | 219 | 219 | 0.0 | 343 | 56.6 | 241 | 10.0 | X |
| 1 | 184 | 184 | 0.0 | 266 | 44.6 | 202 | 9.8 | X |
| 1.2 | 158 | 158 | 0.0 | 231 | 46.2 | 174 | 10.1 | X |
| 1.4 | 139 | 139 | 0.0 | 204 | 46.7 | 153 | 10.1 | X |
| 1.6 | 124 | 124 | 0.0 | 183 | 47.6 | 137 | 10.4 | / |
| 2 | 103 | 103 | 0.0 | 153 | 48.5 | 114 | 10.6 | / |
| Voltage THD | |||||
|---|---|---|---|---|---|
| Power Factor | 1 | 0.8 | 0.6 | 0.4 | Range |
| Driver 1 | 1.56–1.99% | 2.04–3.67% | 2.19–3.94% | 2.27–4.04% | 1.56–4.04% |
| Voltage THD | |||||
|---|---|---|---|---|---|
| Power Factor | 1 | 0.8 | 0.6 | 0.4 | Range |
| Driver 2 | 1.56% | 2.04% | 2.19% | 2.27% | 1.56–2.27% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faranda, R.; Hafezi, H.; Akkala, K.; Lazzaroni, M. AC “Back to Back” Switching Device in Industrial Application. Energies 2020, 13, 3539. https://doi.org/10.3390/en13143539
Faranda R, Hafezi H, Akkala K, Lazzaroni M. AC “Back to Back” Switching Device in Industrial Application. Energies. 2020; 13(14):3539. https://doi.org/10.3390/en13143539
Chicago/Turabian StyleFaranda, Roberto, Hossein Hafezi, Kishore Akkala, and Massimo Lazzaroni. 2020. "AC “Back to Back” Switching Device in Industrial Application" Energies 13, no. 14: 3539. https://doi.org/10.3390/en13143539