Peak Ratio Characteristic Value Sequence Based Signal Processing Method for Transit-Time Ultrasonic Gas Flowmeter


Abstract
:1. Introduction
2. Research on PRCVS Based Signal Processing Method
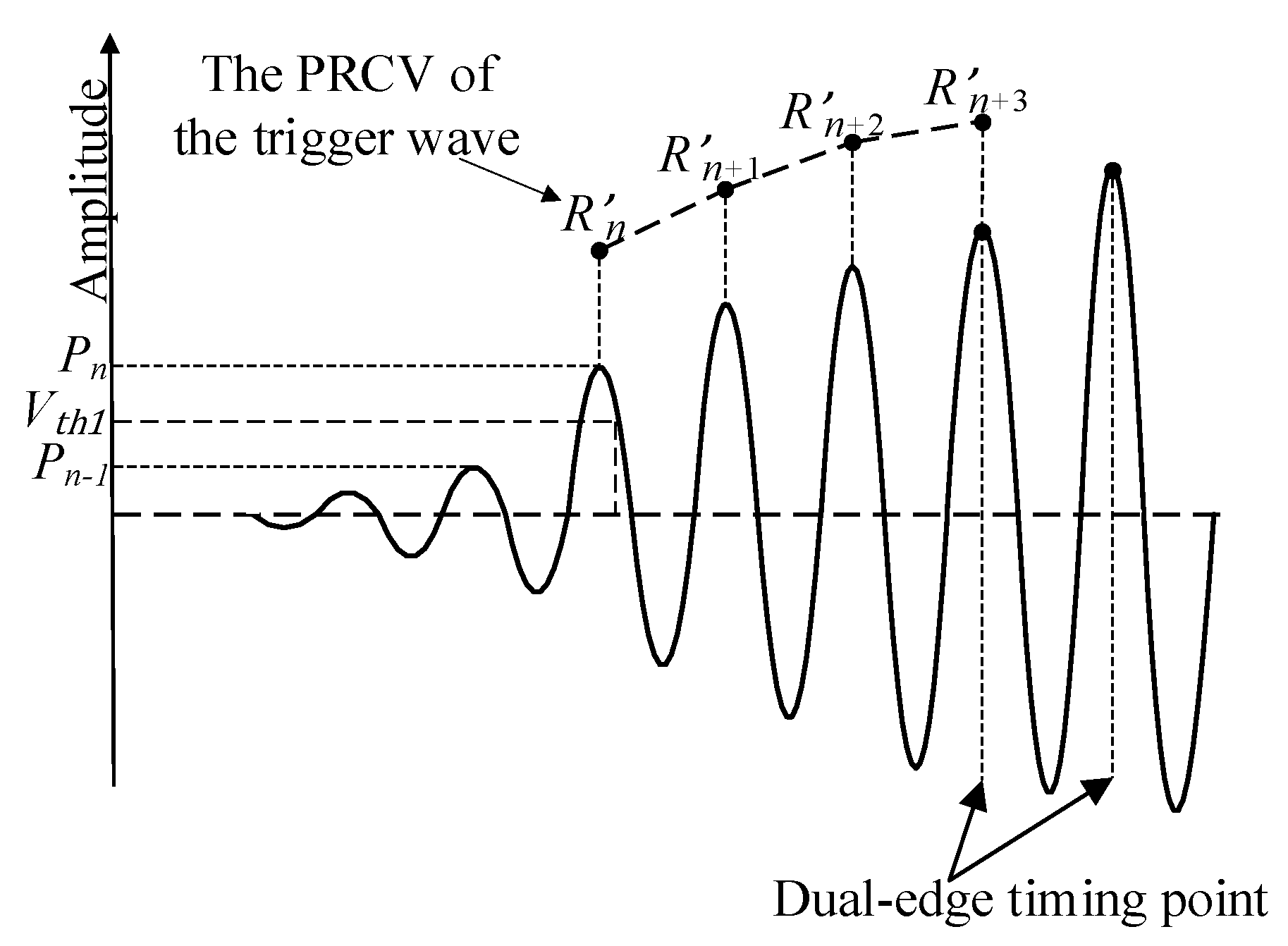
2.1. Research on PRCVS
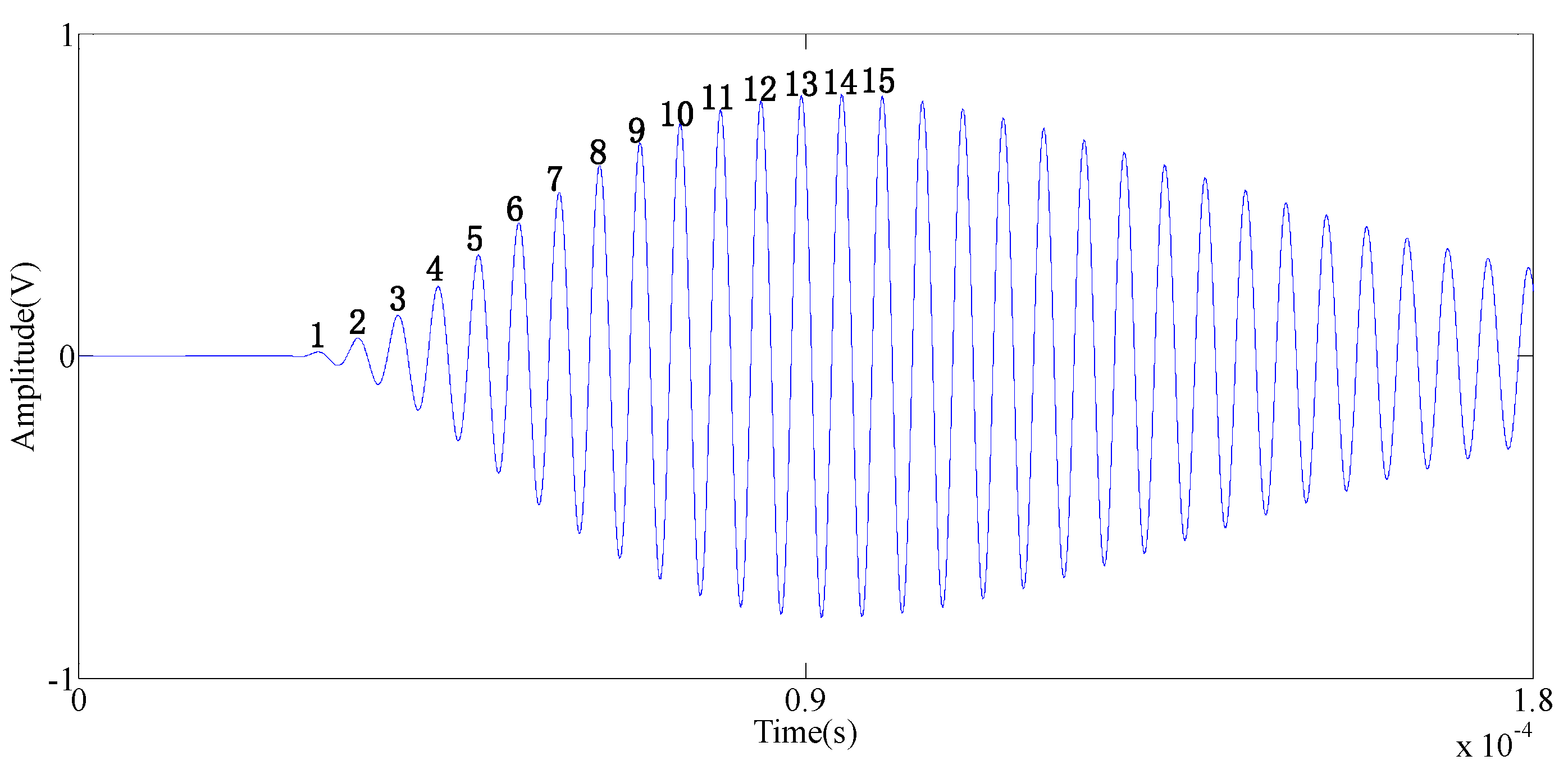
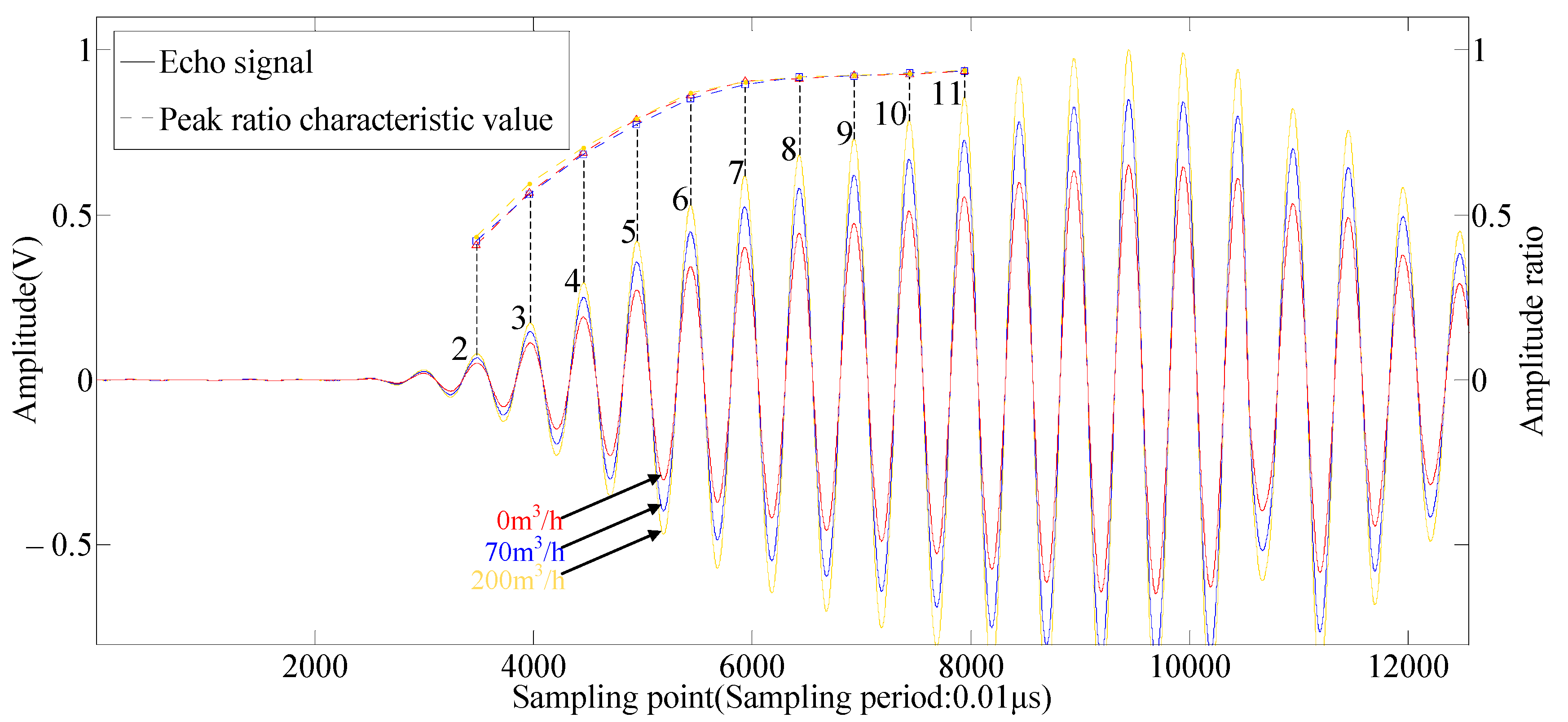
- In the initial peak sequence of ultrasonic signal, the initial peak serial number corresponds to the unique value of the PRCV, which has nothing to do with the amplitude of the ultrasonic signal. Each group of ultrasonic signals has the same PRCV under the same peak serial number.
- The PRCVS composed of the value of the PRCV increases monotonically with the increase of the peak serial number. The smaller the peak serial number is, the greater the change of the adjacent value of the PRCV, and the greater the discrimination of the value of the PRCV under the adjacent peak serial number.
2.2. Establishment of PRCVS-Based Signal Processing Method
2.2.1. Establishment of Reference PRCVS
2.2.2. Ultrasonic Signal Preprocessing
- 1.
- Interpolation of sampling peak
- 2.
- Peak Value Extraction
- 3.
- Waveform discrimination
2.2.3. Monotonicity Judgment of PRCV
2.2.4. PRCV Matching
3. Application and Verification of PRCVS-Based Method
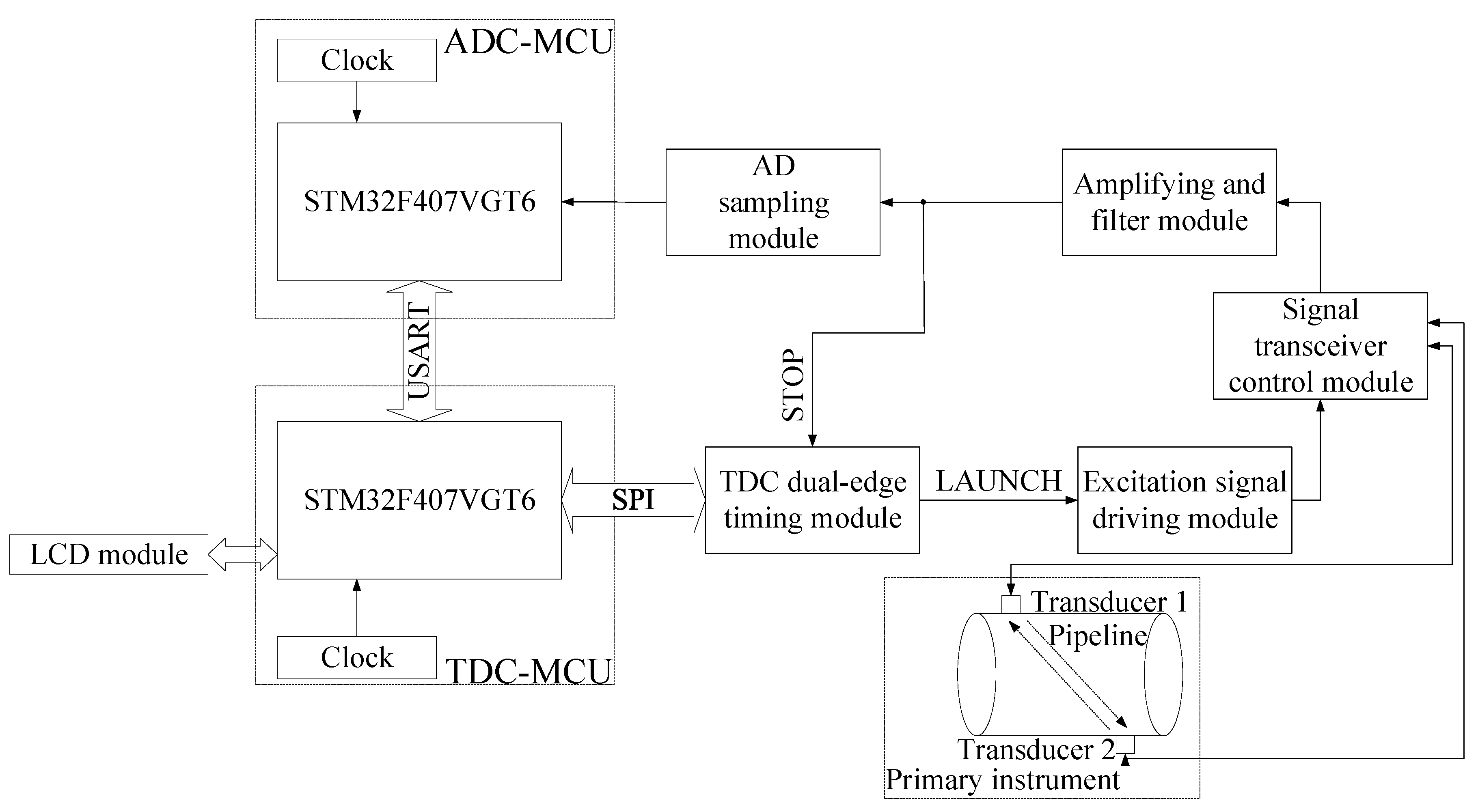
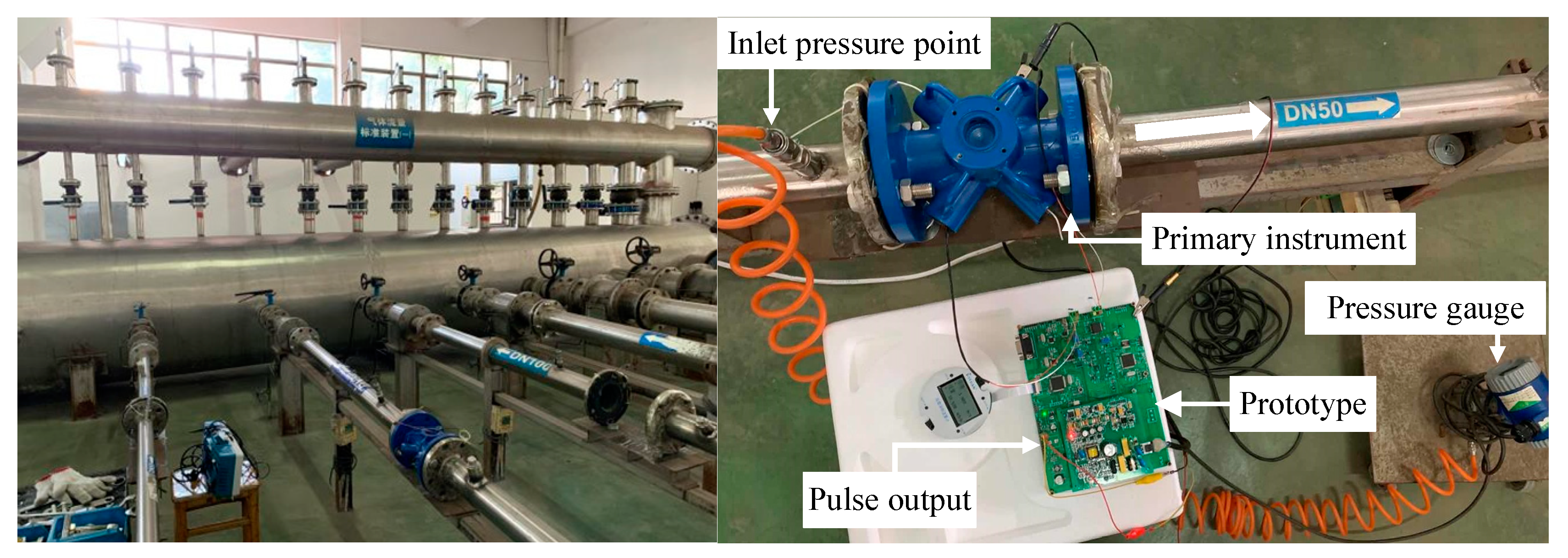
3.1. System Hardware Introduction
- Microprocessor module. Two STM32F407VGT6 master chips with the same model are used in the system, which are named TDC-MCU and ADC-MCU, respectively, according to their functions. TDC-MCU is responsible for reading and writing data with two MAX35101 chips of the TDC dual-edge timing module through SPI. ADC-MCU is responsible for AD (analog-to-digital) sampling, so that the AD sampling module performs AD sampling at the appropriate position of the ultrasonic signal and saves the sampled data in ADC-MCU. The AD data are transmitted between TDC-MCU and ADC-MCU through USART.
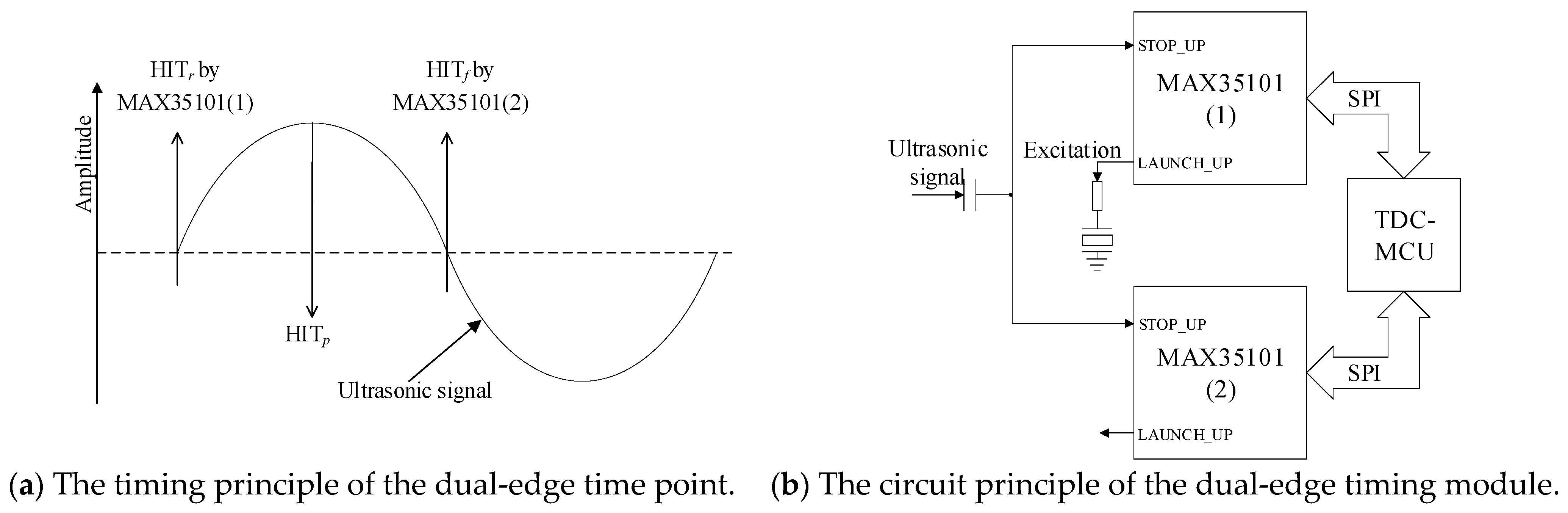
- TDC dual-edge timing module. In this paper, MAX35101 is used for high-precision timing of transit time, and the TDC-MCU in the microprocessor module controls the transmission of the excitation signal launched from the LAUNCH terminal of the TDC. When the ultrasonic signal is sent to the STOP terminal of the TDC, the transit time is measured. The conventional timing method of MAX35101 is the edge timing, but the edge timing error is caused by the fluctuation of the amplitude when measuring the gas ultrasonic signal. This paper uses the cooperative work of two MAX35101 to realize the dual-edge timing of the ultrasonic signal to correct the edge timing error to obtain the dual-edge time point.
- Excitation signal driving module. As the amplitude of the excitation signal transmitted by the TDC dual-edge timing module is small, the excitation pulse signal needs to be amplified by the excitation signal driving module to obtain the ultrasonic signal with appropriate amplitude.
- Signal transceiver control module. The switch channel is switched through the signal transceiver control module, so that the excitation signal and the downstream and upstream related signals are transmitted in the same analog circuit.
- Amplifying and filter module. After amplifying and filtering, the received ultrasonic signal is sent to TDC dual-edge timing module and AD sampling module respectively.
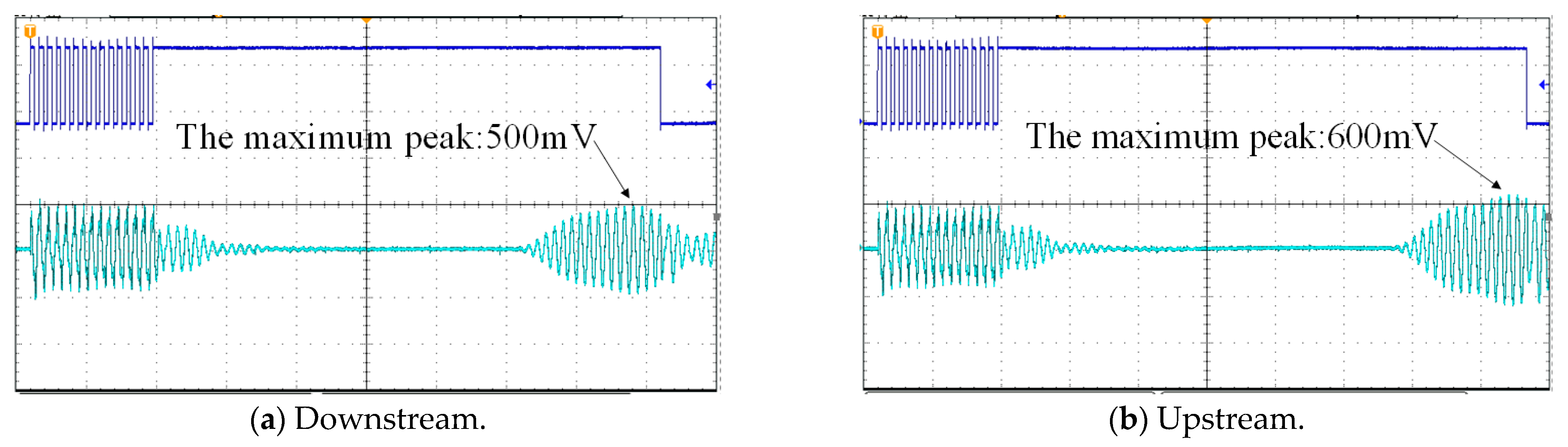
- AD sampling module. High-speed AD sampling is used for ultrasonic signal. After obtaining the downstream and upstream transit time and the corresponding AD data, the ADC-MCU packs the downstream and upstream AD data and transmits it to the TDC-MCU. Then, the TDC-MCU performs subsequent calculation and analysis.
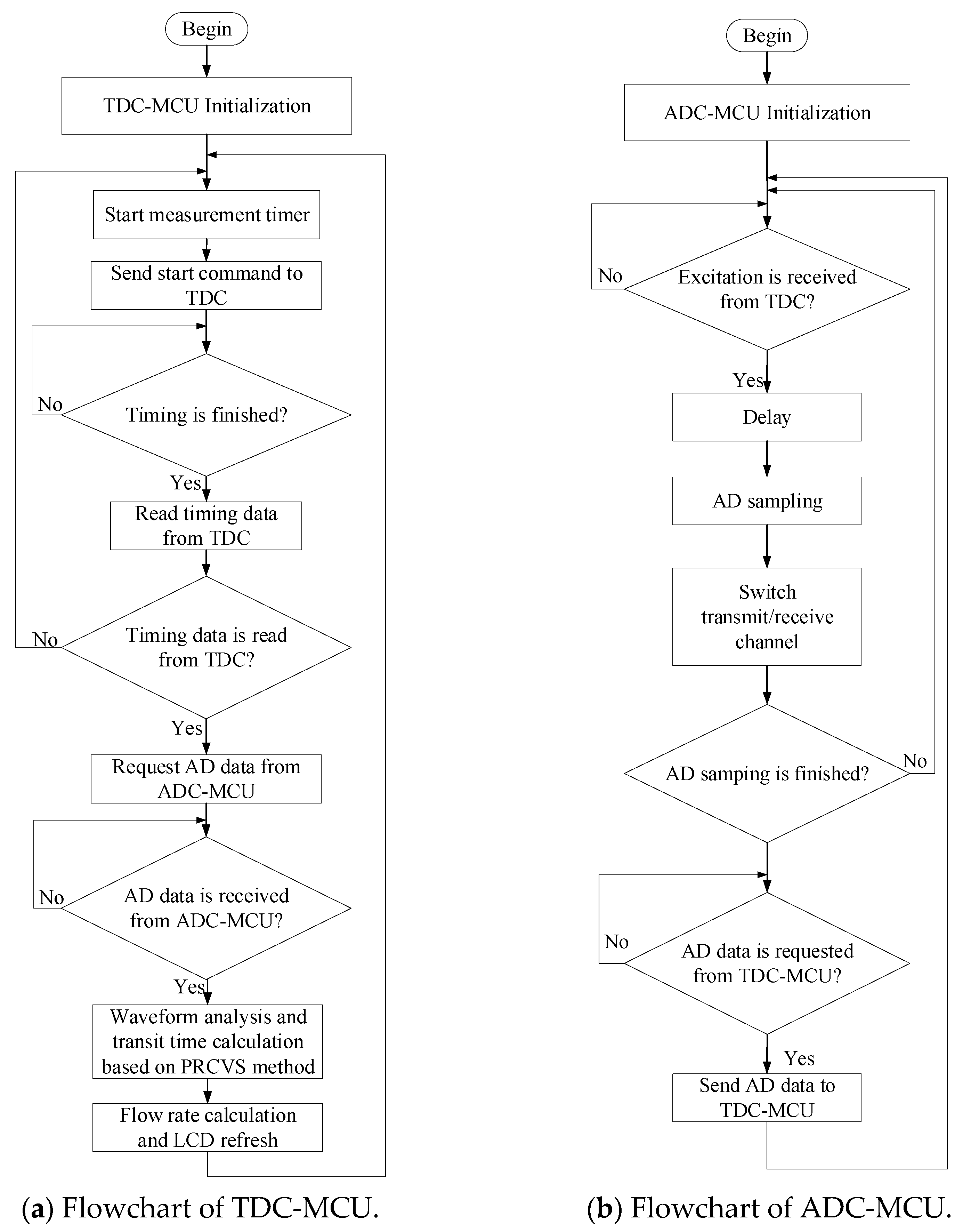
3.2. System Software Introduction
3.3. Calculation of Transit Time Difference and Flow Rate of PRCVS-Based Signal Processing Method
4. Experimental Verification
4.1. Calibration Experiment
4.2. Unstable Flow Field Experiment of the Curved Pipe
5. Conclusions
- (1)
- The aim of this work is to solve the problem of amplitude fluctuation of the ultrasonic signal when it propagates in gas. This paper defines the ratio of adjacent peak amplitude in the ultrasonic signal as the PRCV of the peak by analyzing the mathematical model of ultrasonic signal. When the transducer is unchanged, the PRCV of the ultrasonic signal of any amplitude is only related to the peak serial number.
- (2)
- This paper proposes the PRCVS method for transit-time ultrasonic gas flowmeter. According to the corresponding relationship between the PRCV and the peak serial number, a set of reference PRCVS is established. By matching the characteristic value of the ultrasonic signal with the reference characteristic value sequence, the peak serial number can be determined.
- (3)
- In this paper, the PRCVS-based signal processing method is applied to the gas flow measurement system based on TDC that has strict requirements on the peak serial number which can verify the effectiveness of the method. The calibration experiment of basic measurement performance test and the unstable flow field experiment of the curved pipe were performed on the gas flow standard device, which verified the stability and validity of the method proposed in this paper.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, S.H.; Garcia, R. Development of a Digital and Battery-Free Smart Flowmeter. Energies 2014, 7, 3695–3709. [Google Scholar] [CrossRef]
- Fan, S.J.; Zhuo, Y. A multi-frequency ultrasonic flowmeter applicable to liquid with gas bubbles. In Proceedings of the 2011 IEEE International Instrumentation and Measurement Technology Conference, Binjiang, China, 10–12 May 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Jacobson, S. New developments in ultrasonic gas analysis and flowmetering. In Proceedings of the IEEE International Ultrasonics Symposium Proceedings, Beijing, China, 2–5 November 2008; pp. 508–516. [Google Scholar] [CrossRef]
- Mylvaganam, K.S. High-rangeability ultrasonic gas flowmeter for monitoring flare gas. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 144–149. [Google Scholar] [CrossRef] [PubMed]
- Folkestad, T.; Mylvaganam, K.S. Chirp excitation of ultrasonic probes and algorithm for filtering transit times in high-rangeability gas flow metering. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1993, 40, 193–215. [Google Scholar] [CrossRef] [PubMed]
- Fang, M.; Xu, K.J.; Zhu, W.J.; Shen, Z.W. Energy transfer model and its applications of ultrasonic gas flow-meter under static and dynamic flow rates. Rev. Sci. Instrum. 2016, 87, 015107. [Google Scholar] [CrossRef]
- Sabatini, A.M. A digital-signal-processing technique for ultrasonic signal modeling and classification. IEEE Trans. Instrum. Meas. 2001, 50, 15–21. [Google Scholar] [CrossRef]
- Brassier, P.; Hosten, B.; Vulovic, F. High-frequency transducers and correlation method to enhance ultrasonic gas flow metering. Flow Meas. Instrum. 2001, 12, 201–211. [Google Scholar] [CrossRef]
- Calzolai, M.; Capineri, L.; Fort, A.; Masotti, L.; Rocchi, S.; Scabia, M. A 3-D PW ultrasonic Doppler flowmeter: Theory and experimental characterization. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 108–113. [Google Scholar] [CrossRef]
- Worch, A. A clamp-on ultrasonic cross correlation flow meter for one-phase flow. Meas. Sci. Technol. 1999, 9, 622–630. [Google Scholar] [CrossRef]
- Lynnworth, L.C.; Liu, Y. Ultrasonic flowmeters: Half-century progress report, 1955–2005. Ultrasonics 2006, 44, e1371–e1378. [Google Scholar] [CrossRef]
- Wei, E.Y. Research of Ultrasonic Gas Flowmeter with Signal Track Based on Time-difference Method. Master’s Thesis, Zhejiang University, Zhejiang, China, February 2014. [Google Scholar]
- Sugi, T.; Sasaki, T. Ultrasonic Flow Meter. US Patent Specification 7299150B1, 20 November 2007. [Google Scholar]
- Ma, Q.Y. Ultrasonic Gas Flowmeter Based on Dynamic Reference Waveform Cross-Correlation Algorithm. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3066–3070. [Google Scholar] [CrossRef]
- Yang, F.L. Development of Smart Ultrasonic Gas Flowmeter. Master’s Thesis, China Jiliang University, Hangzhou, Zhejiang, China, January 2018. [Google Scholar]
- Kobayashi, T.; Shigeta, K.; Fujii, T. Transit-Time Difference Type Ultrasonic Flowmeter. US Patent Specification 6647805B2, 18 November 2003. [Google Scholar]
- Tian, L.; Xu, K.J.; Mu, L.B.; Liu, B. Energy peak fitting of echo based signal processing method for ultrasonic gas flow meter. Measurement 2018, 117, 41–48. [Google Scholar] [CrossRef]
- Liu, B.; Xu, K.J.; Mu, L.B.; Tian, L. Echo energy integral based signal processing method for ultrasonic gas flow meter. Sensor. Actuat. A Phys. 2018, 277, 181–189. [Google Scholar] [CrossRef]
- Mu, L.B.; Xu, K.J.; Liu, B.; Tian, L.; Liang, L.P. Echo signal envelope fitting based signal processing methods for ultrasonic gas flow-meter. ISA Trans. 2019, 89, 233–244. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Lin, W.J.; Zhang, C.Y.; Shen, Z.H.; Zhang, H.L. Time Delay Estimation in the Ultrasonic Flowmeter in the Oil Well. In Proceedings of the International Congress on Ultrasonics, University of Santiago Chile, Santiago, Chile, 11–17 January 2009; pp. 781–788. [Google Scholar] [CrossRef] [Green Version]
- Zhu, W.J.; Xu, K.J.; Fang, M.; Shen, Z.W.; Tian, L. Variable ratio threshold and zero-crossing detection based signal processing method for ultrasonic gas flow meter. Measurement 2017, 103, 343–352. [Google Scholar] [CrossRef]
- Chen, J.; Chen, S.Y.; Li, B.; Lu, J.W. Research on a transit-time liquid ultrasonic flowmeter under unstable flow fields. Meas. Sci. Technol. 2019, 30, 55902. [Google Scholar] [CrossRef]
- Parrilla, M.; Anaya, J.J.; Fritsch, C. Digital signal processing techniques for high accuracy ultrasonic range measurements. IEEE Trans. Instrum. Meas. 1991, 40, 759–763. [Google Scholar] [CrossRef]
- Sabatini, A.M. Correlation receivers using Laguerre filter banks for modelling narrowband ultrasonic echoes and estimating their time-of-flights. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 1253–1263. [Google Scholar] [CrossRef]
- Andria, G.; Attivissimo, F.; Giaquinto, N. Digital signal processing techniques for accurate ultrasonic sensor measurement. Measurement 2001, 30, 105–114. [Google Scholar] [CrossRef]
- Angrisani, L.; Baccigalupi, A.; Lo Moriello, R.S. Ultrasonic time-of-flight estimation through unscented Kalman filter. IEEE Trans. Instrum. Meas. 2006, 1077–1084. [Google Scholar] [CrossRef]
- Lin, M.L.; Yin, B.Z.; Liu, Z.Y. Digital Interpolation Theory and Sinc Interpolation Algorithm on High-speed Sampling Signals. Acta Electron. Sin. 2000, 12, 8–10. [Google Scholar]
- JJG 1030-2007. Verification Regulation of Ultrasonic Flowmeters, General Administration of Quality Supervision, Inspection and Quarantine of China. Available online: https://wenku.baidu.com/view/2f9a699189eb172dec63b702.html (accessed on 18 July 2014).
- Enayet, M.M.; Gibson, M.M.; Taylor, A.; Yianneskis, M. Laser-Doppler measurements of laminar and turbulent flow in a pipe bend. Int. J. Heat Fluid Flow 1982, 3, 213–219. [Google Scholar] [CrossRef] [Green Version]
- Carlander, C.; Delsing, J. Installation effects on an ultrasonic flow meter with implications for self diagnostics. Flow Meas. Instrum. 2000, 11, 109–122. [Google Scholar] [CrossRef] [Green Version]
- GB 50093–2013. Code for Construnction and Quality Acceptance of Automation Instrumentation Engineering, General Administration of Quality Supervision, Inspection and Quarantine of China. Available online: https://www.doc88.com/p-0743846824924.html (accessed on 27 March 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flow Rate (m3/h) | The Value of the PRCV | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Peak 2 | Peak 3 | Peak 4 | Peak 5 | Peak 6 | Peak 7 | Peak 8 | Peak 9 | Peak 10 | |
| 0 | 0.409 | 0.568 | 0.689 | 0.788 | 0.863 | 0.905 | 0.913 | 0.922 | 0.926 |
| 70 | 0.422 | 0.561 | 0.683 | 0.774 | 0.851 | 0.895 | 0.917 | 0.920 | 0.929 |
| 200 | 0.434 | 0.596 | 0.704 | 0.791 | 0.869 | 0.902 | 0.918 | 0.923 | 0.928 |
| Flow Rate (m3/h) | Actual Pulse Coefficient (1 /m3) | Average Actual Pulse Coefficient (1 /m3) | Average Actual Coefficient Error (%) | Repeatability (%) |
|---|---|---|---|---|
| 10 | 5.0133 | 5.0069 | +0.14 | 0.14 |
| 4.9994 | ||||
| 5.0079 | ||||
| 20 | 5.0391 | 5.0517 | +1.03 | 0.27 |
| 5.0496 | ||||
| 5.0663 | ||||
| 79 | 4.9777 | 4.9770 | −0.46 | 0.11 |
| 4.9713 | ||||
| 4.9820 | ||||
| 202 | 4.9664 | 4.9744 | −0.51 | 0.18 |
| 4.9838 | ||||
| 4.9729 |
| Flow Rate (m3/h) | Actual Pulse Coefficient (1/m3) | Average Actual Pulse Coefficient (1/m3) | Average Actual Coefficient Error (%) | Repeatability (%) |
|---|---|---|---|---|
| 10 | 3.0091 | 3.0250 | +0.83 | 0.47 |
| 3.0296 | ||||
| 3.0363 | ||||
| 73 | 2.9762 | 2.9811 | −0.63 | 0.88 |
| 3.0096 | ||||
| 2.9575 | ||||
| 200 | 2.9600 | 2.9755 | −0.81 | 0.57 |
| 2.9938 | ||||
| 2.9729 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Gou, Y.; Chen, J.; Zhang, Z. Peak Ratio Characteristic Value Sequence Based Signal Processing Method for Transit-Time Ultrasonic Gas Flowmeter. Energies 2021, 14, 426. https://doi.org/10.3390/en14020426
Li B, Gou Y, Chen J, Zhang Z. Peak Ratio Characteristic Value Sequence Based Signal Processing Method for Transit-Time Ultrasonic Gas Flowmeter. Energies. 2021; 14(2):426. https://doi.org/10.3390/en14020426
Chicago/Turabian StyleLi, Bin, Yang Gou, Jie Chen, and Zhengyu Zhang. 2021. "Peak Ratio Characteristic Value Sequence Based Signal Processing Method for Transit-Time Ultrasonic Gas Flowmeter" Energies 14, no. 2: 426. https://doi.org/10.3390/en14020426