
Magnetic Coupler Optimization for Inductive Power Transfer System of Unmanned Aerial Vehicles



Abstract
:1. Introduction
- (1)
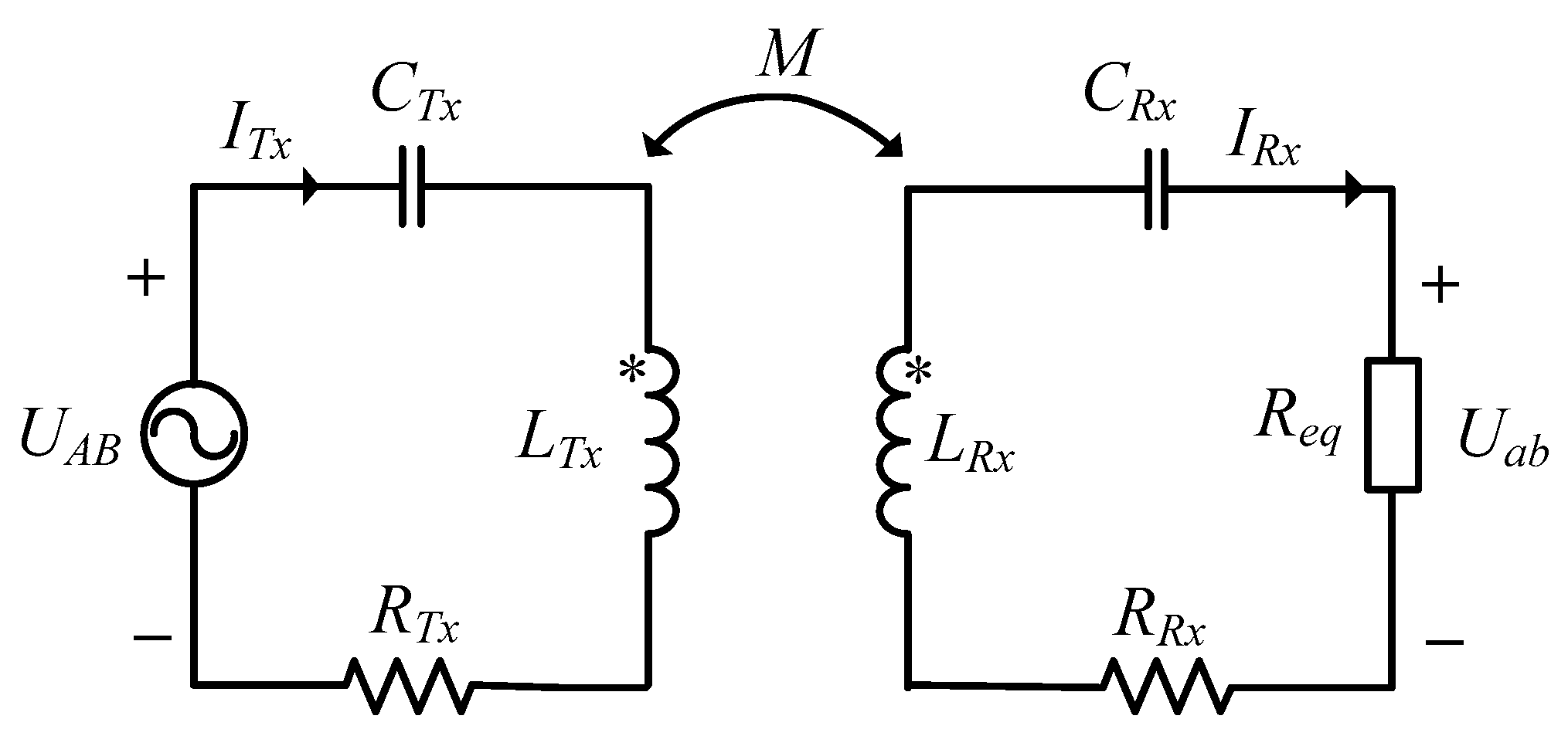
- The IPT system is proposed. The parameters such as power, efficiency, coupling coefficient, and compensation capacitances are analyzed by building an equivalent model.
- (2)
- The design principle of the magnetic coupler for UAVs is pointed out in detail. Three types of magnetic couplers are analyzed and compared. An optimized magnetic coupler with ferrite PQI cores is obtained. This magnetic coupler can provide a strong magnetic flux density, achieve a high coupling coefficient, and maintain a stable power transfer. The magnetic field distribution and coupling capability are analyzed using the finite element software COMSOL.
- (3)
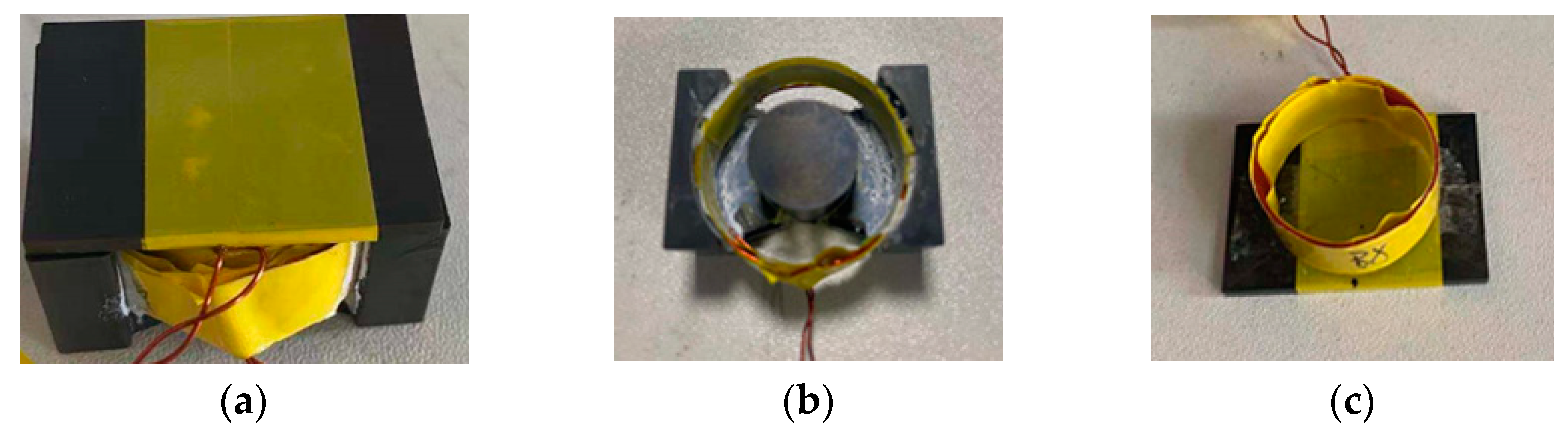
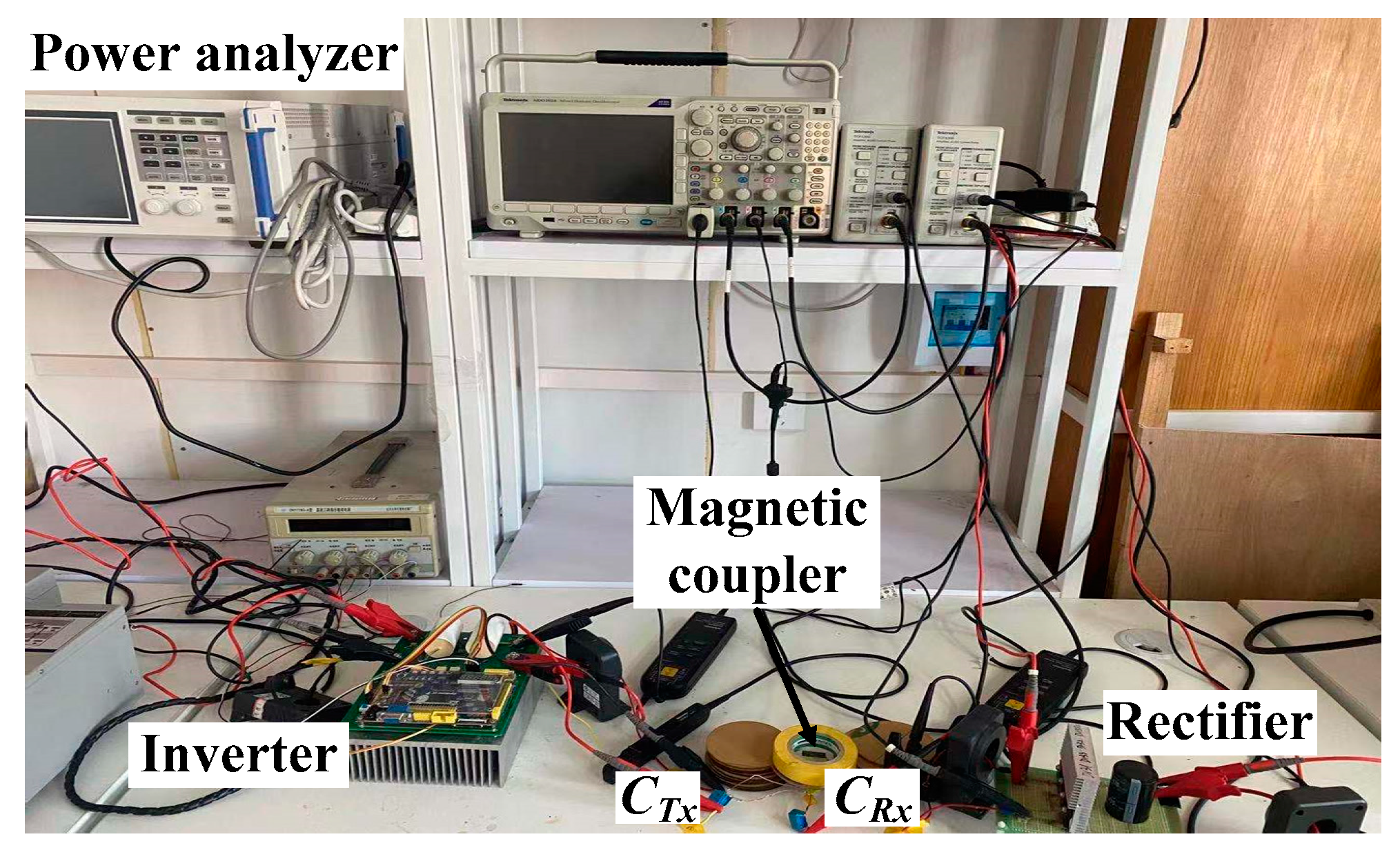
- An experimental platform is implemented to investigate the coupling capability of the magnetic coupler and the IPT system power transfer, which verifies the validity of the proposed IPT system for UAVs.
2. IPT System for UAVs
3. Magnetic Coupler Optimization for UAVs
3.1. Magnetic Coupler Design Principle
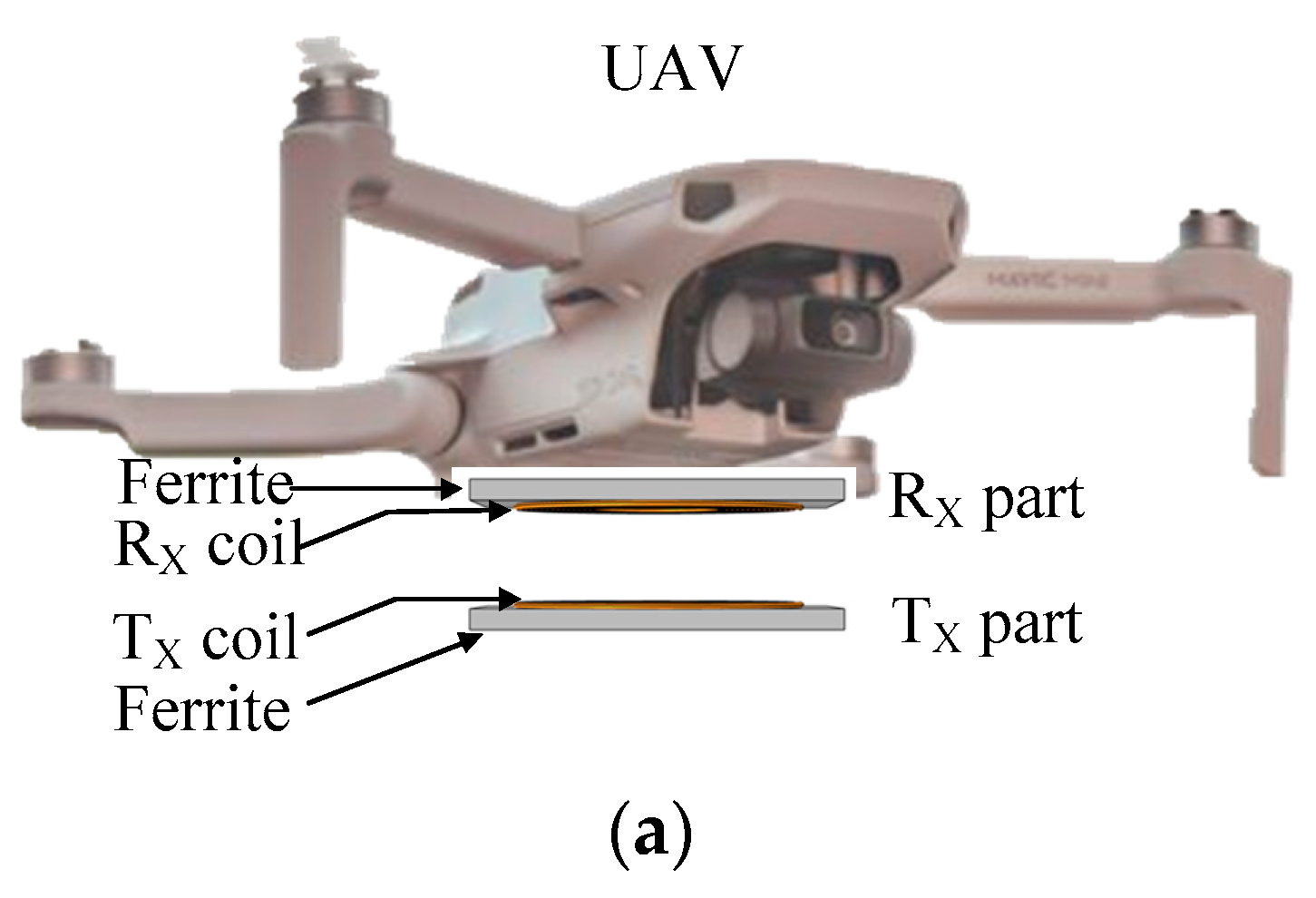
- The space occupied by the receiving part should be considered. The receiving part is installed on the UAV, such that the receiving part should be compact and light to avoid the impact of overweight and imbalance on the flight status of the UAV.
- The magnetic coupler should have a strong magnetic flux density and a high coupling coefficient to improve the transfer power and efficiency of the IPT system.
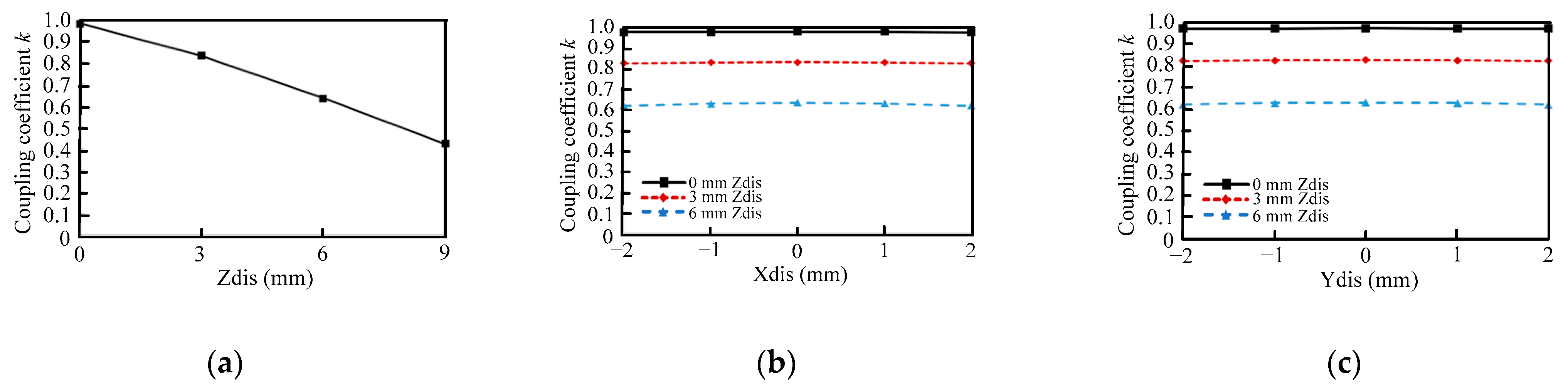
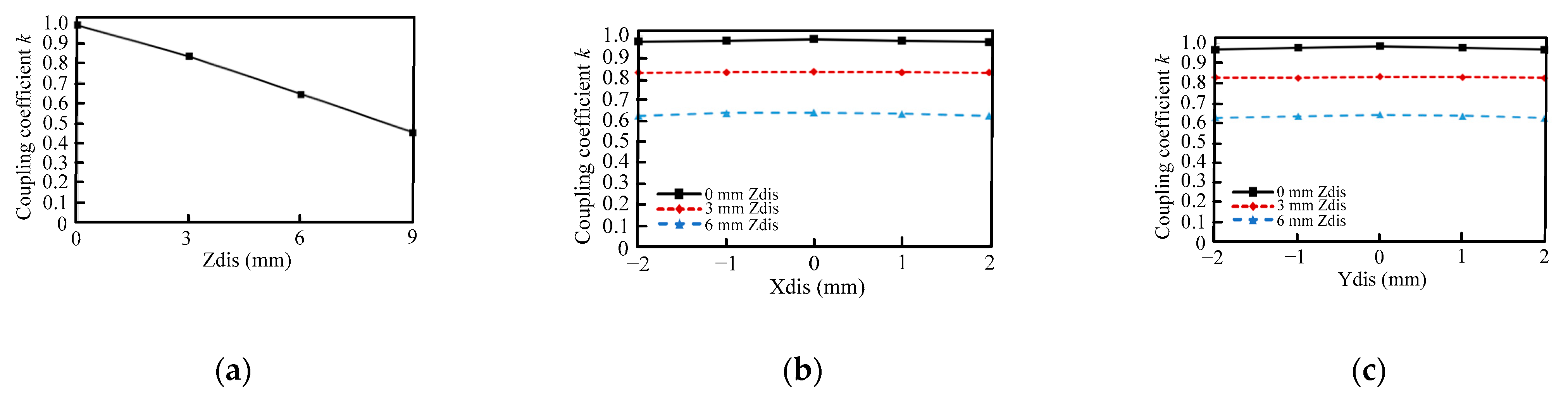
- The magnetic coupler should have enhanced misalignment tolerance. The UAV cannot ensure that it works in complete alignment every time due to the limitation of its landing accuracy. Thus, enhanced misalignment tolerance can ensure that the IPT system transfers a stable power and is efficient.
- The leakage flux density should meet the International Commission on Non-Ionizing Radiation Protection safety standard. The leakage magnetic field will heat the metal parts of the UAV, which will affect the UAV’s work and even damage it. From the safety standard [27], the minimum flux density that harms humans is 2.7 × 10−5 T, such that the goal in this paper is to ensure that the leakage flux density for the UAV is less than this safety standard.
3.2. Typical Magnetic Coupler with Circular Coils and I Cores
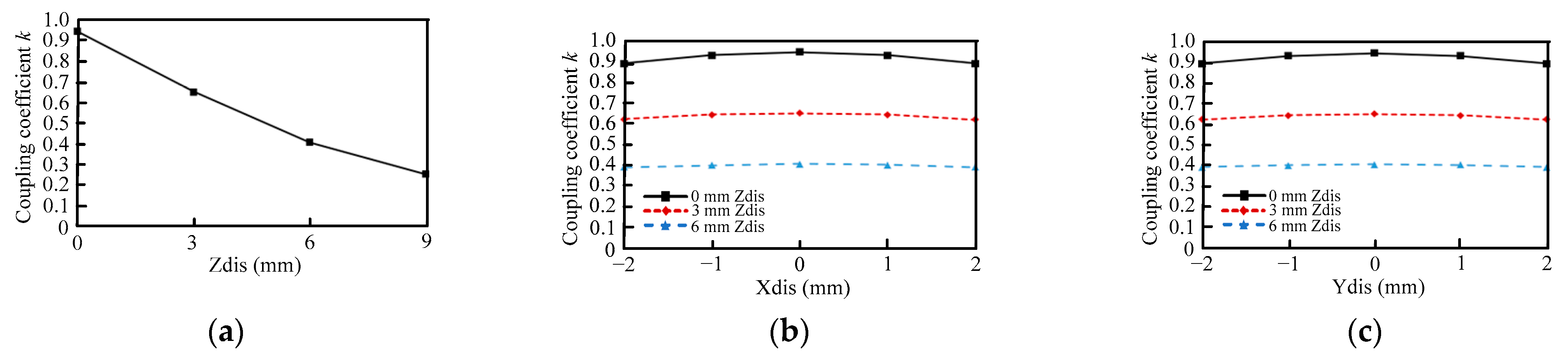
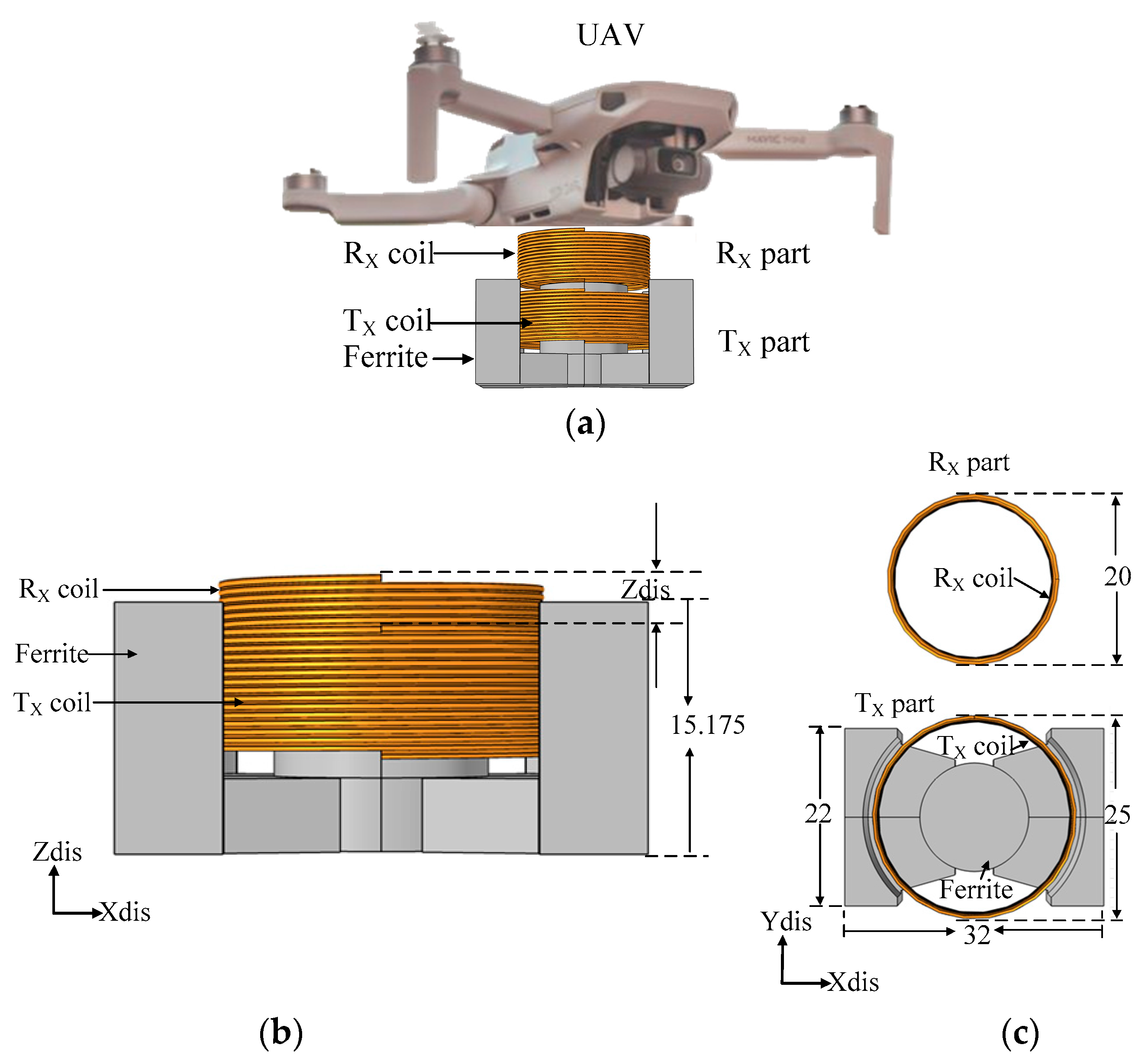
3.3. Proposed Magnetic Coupler with Vertical Spiral Coils and a PQ Core
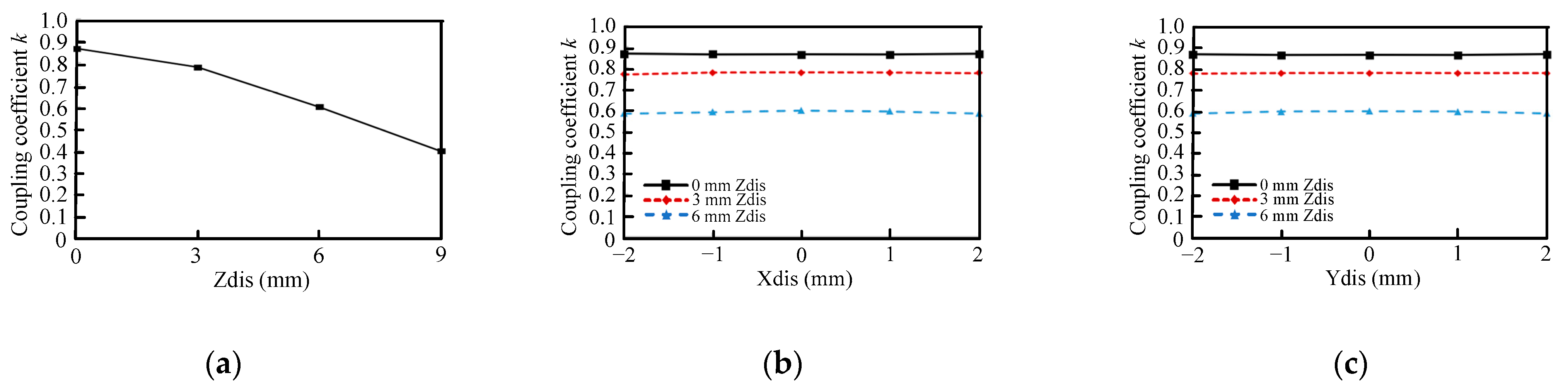
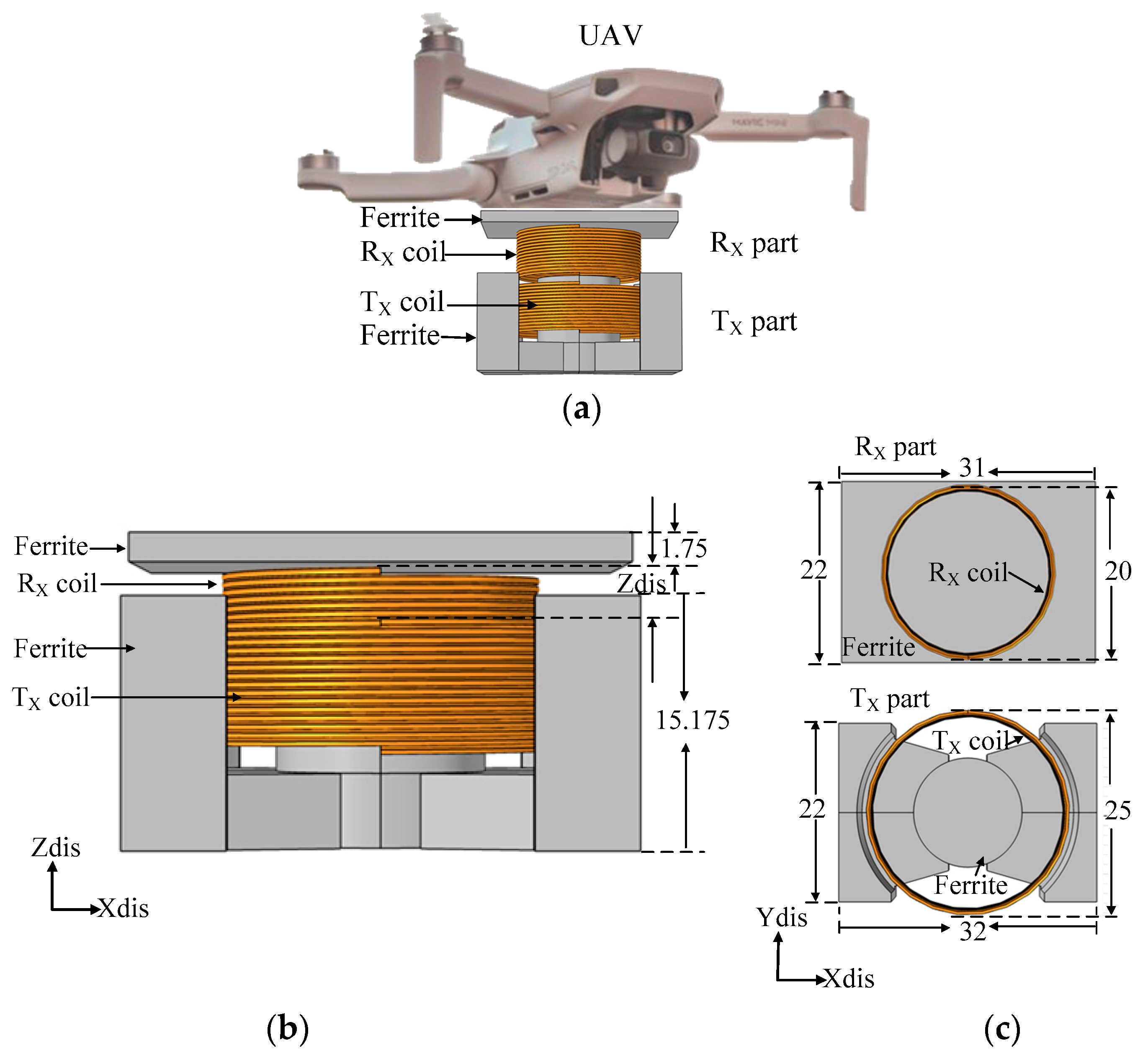
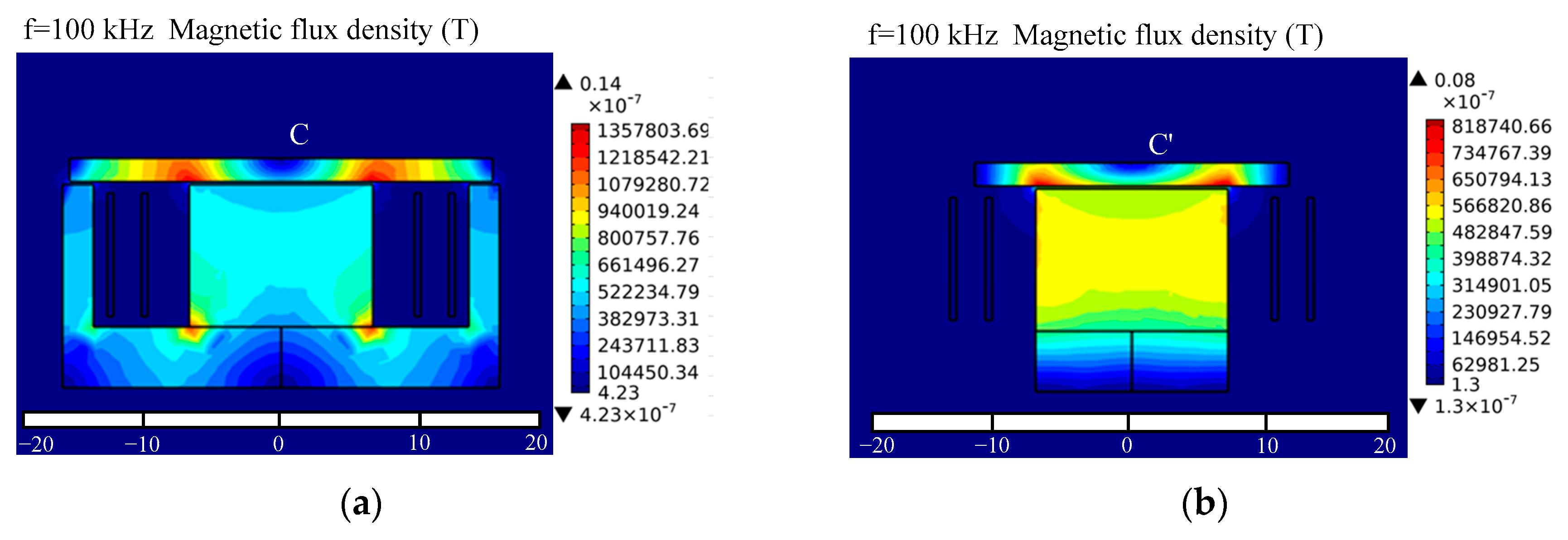
3.4. Proposed Magnetic Coupler with Vertical Spiral Coils and PQI Cores
- (1)
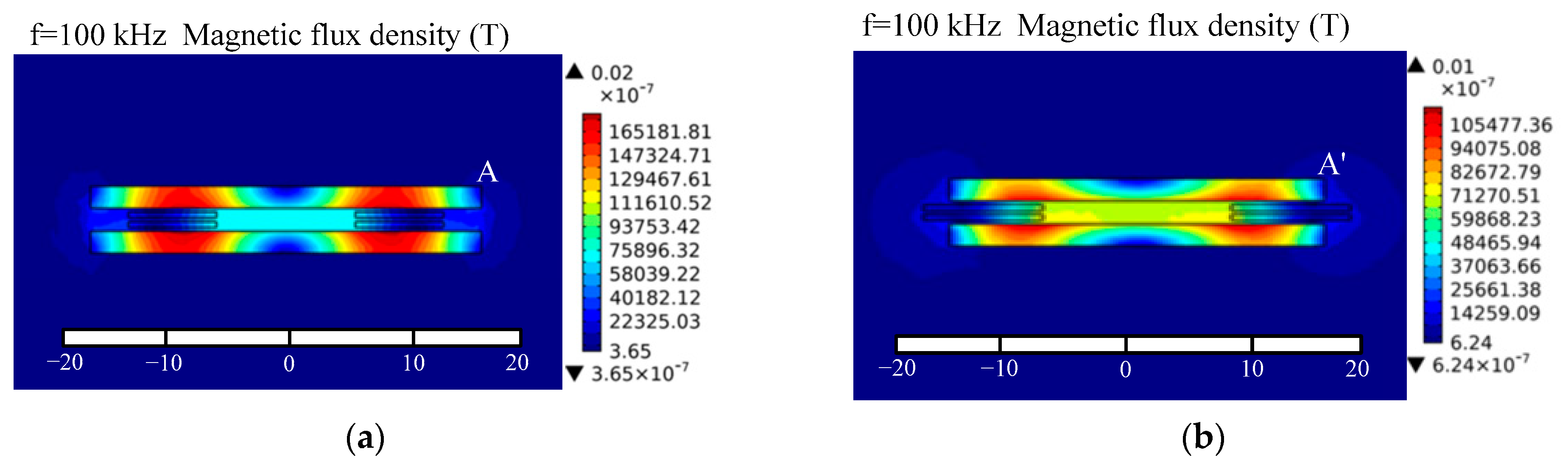
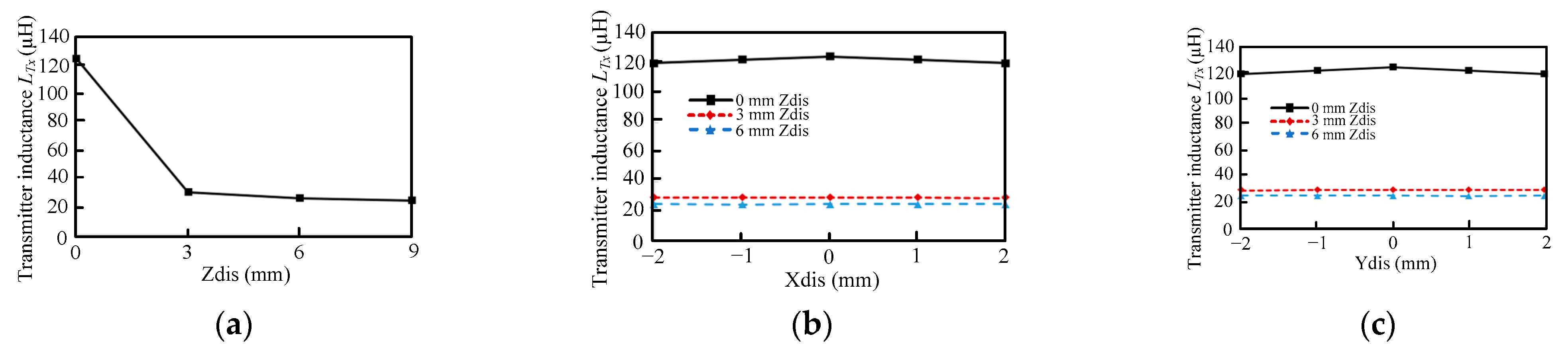
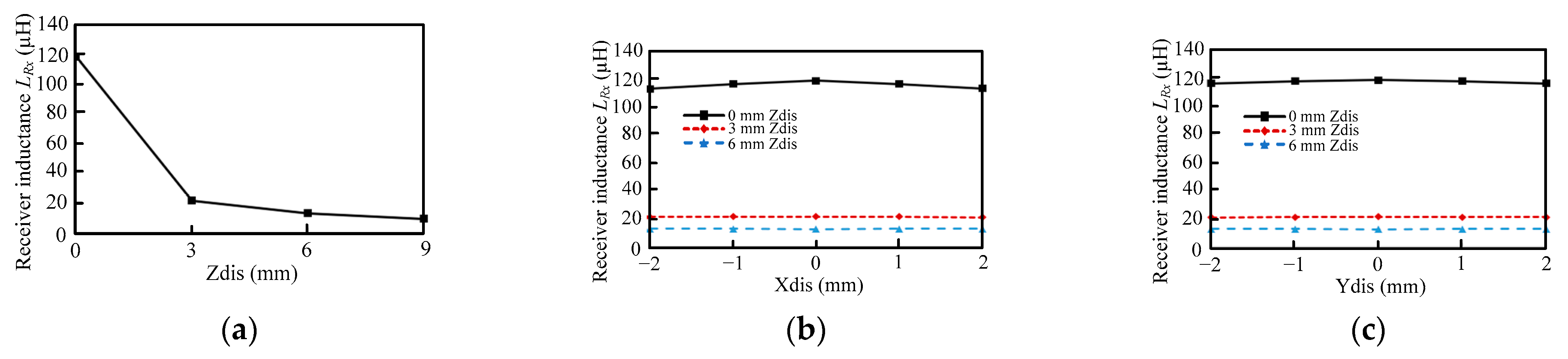
- The magnetic field is symmetrically distributed along the X- and Y-axis directions. It has a perfect lateral misalignment tolerance, which is valuable to provide a stable power transfer.
- (2)
- It has high magnetic flux density and coupling coefficient.
- (3)
- The leakage flux density is less than the safety standard, which will not affect the work of the UAV.
4. Experimental Testing
4.1. Magnetic Coupler Testing
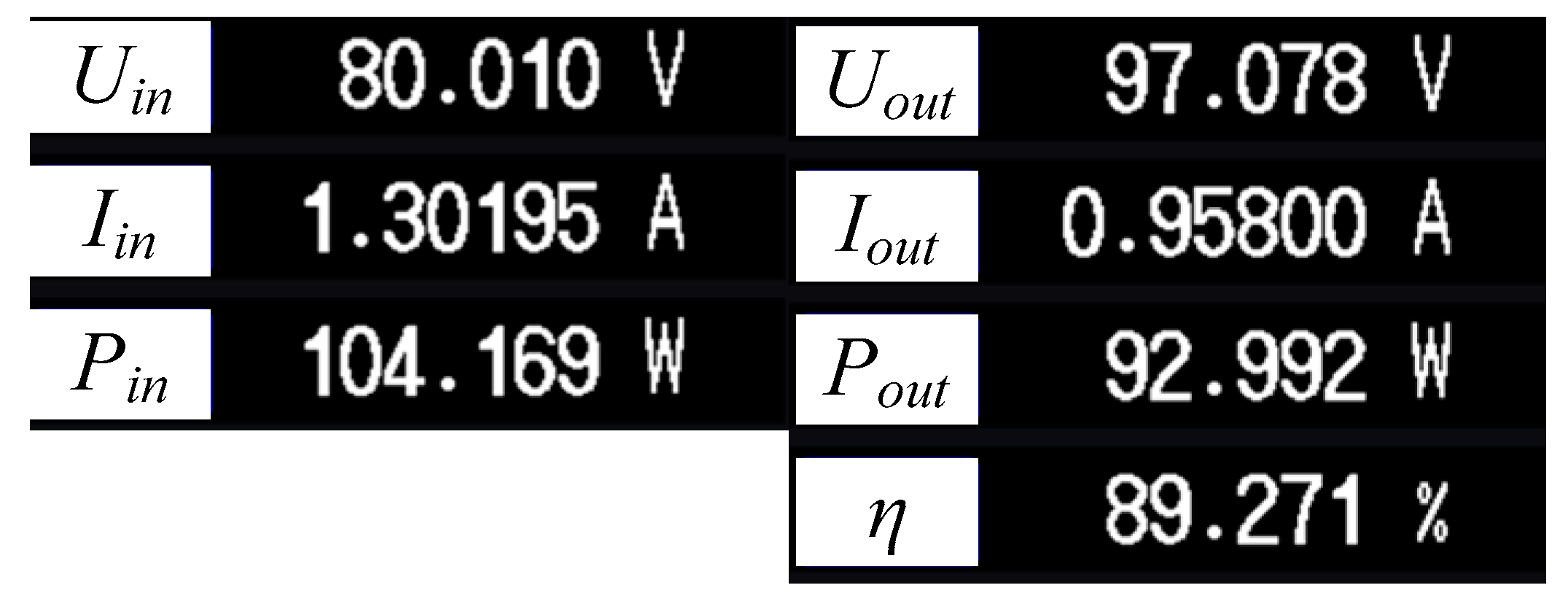
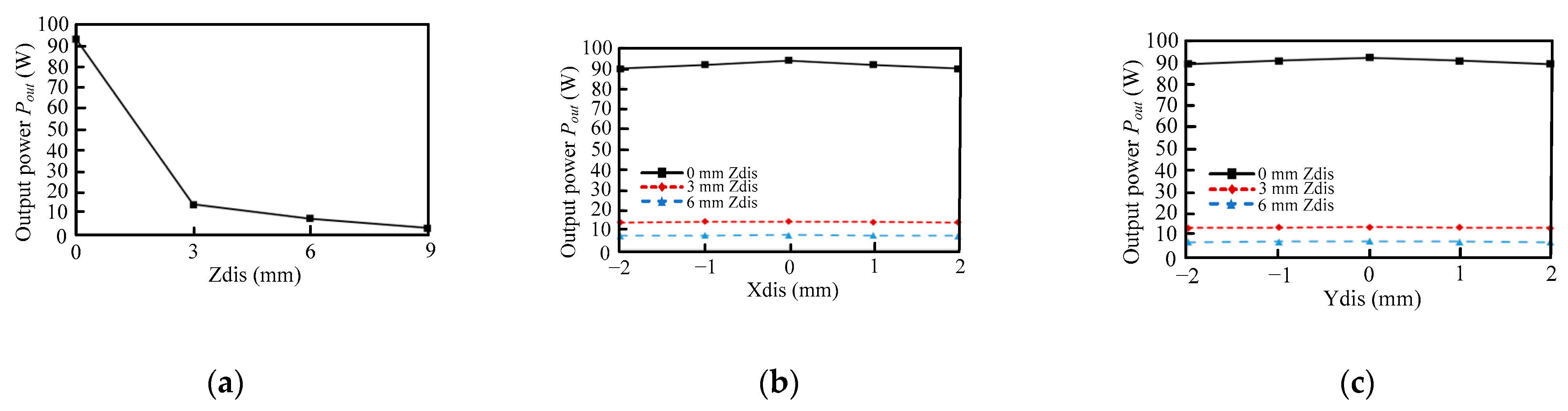
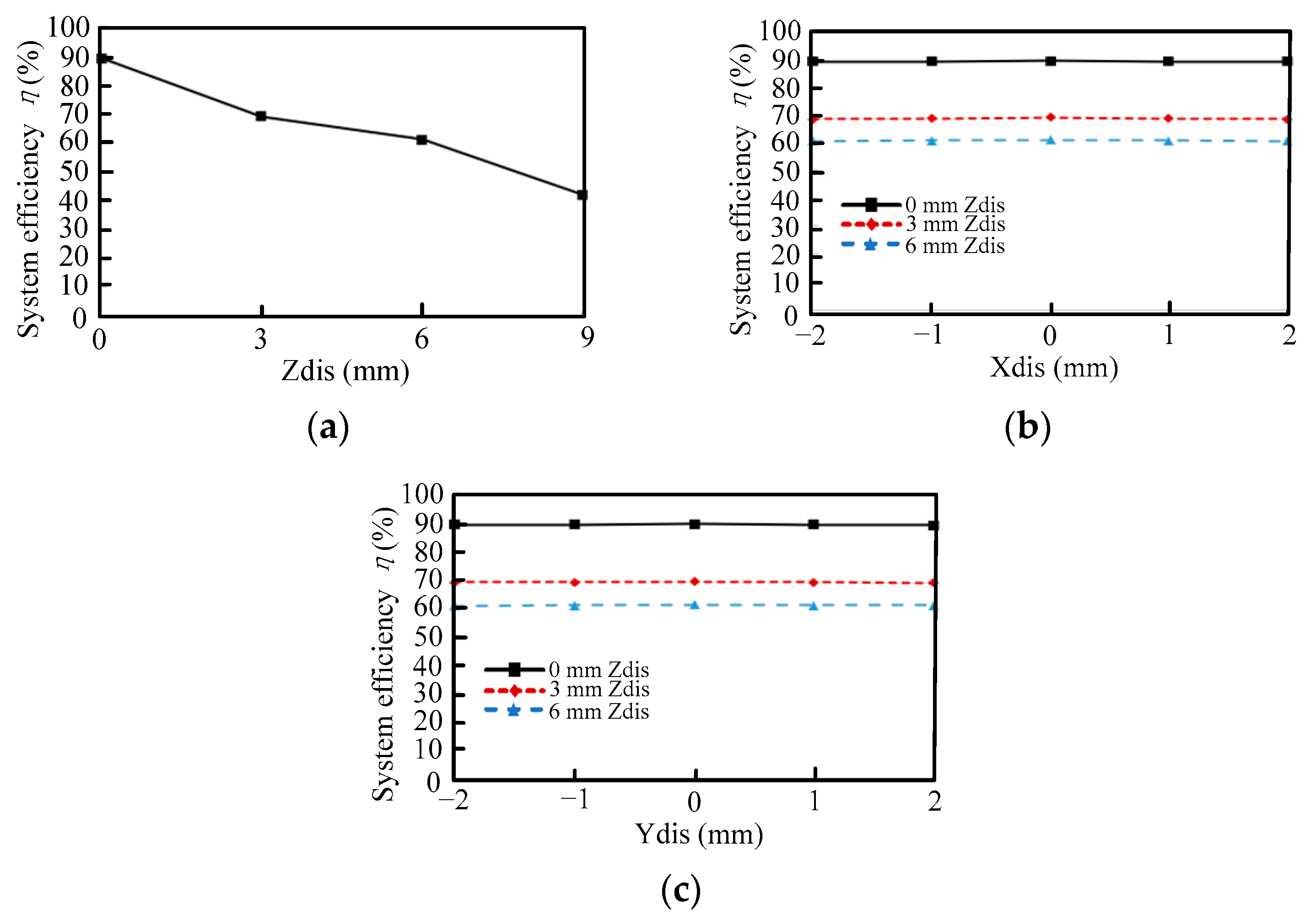
4.2. Power Transfer Testing
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Agarwal, P.; Singh, M.K. A multipurpose drone for water sampling & video surveillance. In Proceedings of the 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, 25–28 February 2019; pp. 1–5. [Google Scholar]
- Cho, J.; Lim, G.; Biobaku, T.; Kim, S.; Parsaei, H. Safety and security management with unmanned aerial vehicle (UAV) in oil and gas industry. Procedia Manuf. 2015, 3, 1343–1349. [Google Scholar] [CrossRef] [Green Version]
- Vemula, S.; Frye, M. Mask R-CNN powerline detector: A deep learning approach with applications to a UAV. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–6. [Google Scholar]
- Gharibi, M.; Boutaba, R.; Waslander, S.L. Internet of drones. IEEE Access 2016, 4, 1148–1162. [Google Scholar] [CrossRef]
- Aljehani, M.; Inoue, M. Performance evaluation of multi-UAV system in post-disaster application: Validated by HITL simulator. IEEE Access 2019, 7, 64386–64400. [Google Scholar] [CrossRef]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless charging techniques for UAVs: A review, reconceptualization, and extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Oliveira, H.C.; Guizilini, V.C.; Nunes, I.P.; Souza, J.R. Failure detection in row crops from UAV images using morphological operators. IEEE Geosci. Remote Sens. Lett. 2018, 15, 991–995. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Tan, P.; Wang, P. Joint ground and aerial package delivery services: A stochastic optimization approach. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2241–2254. [Google Scholar] [CrossRef] [Green Version]
- Perreault, M.; Behdinan, K. Delivery drone driving cycle. IEEE Trans. Veh. Technol. 2021, 70, 1146–1156. [Google Scholar] [CrossRef]
- Wang, D.; Hu, P.; Du, J.; Zhou, P.; Deng, T.; Hu, M. Routing and scheduling for hybrid truck-drone collaborative parcel delivery with independent and truck-carried drones. IEEE Internet Things J. 2019, 6, 10483–10495. [Google Scholar] [CrossRef]
- Suti, A.; Rito, G.D.; Galatolo, R. Climbing performance enhancement of small fixed-wing UAVs via hybrid electric propulsion. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; pp. 305–310. [Google Scholar]
- Finger, D.F.; Bil, C.; Braun, C. Initial sizing methodology for hybrid electric general aviation aircraft. J. Aircr. 2020, 57, 245–255. [Google Scholar] [CrossRef]
- Bogusz, P.; Korkosz, M.; Powrózek, A.; Prokop, J.; Wygonik, P. An analysis of properties of the BLDC motor for unmanned aerial vehicle hybrid drive. In Proceedings of the 2015 International Conference on Electrical Drives and Power Electronics (EDPE), Tatranska Lomnica, Slovakia, 21–23 September 2015; pp. 458–464. [Google Scholar]
- Obayashi, S.; Kanekiyo, Y.; Nishizawa, K.; Kusada, H. 85-kHz band 450-W inductive power transfer for unmanned aerial vehicle wireless charging port. In Proceedings of the 2019 IEEE Wireless Power Transfer Conference (WPTC), London, UK, 8–21 June 2019; pp. 80–84. [Google Scholar]
- Cai, C.; Wu, S.; Jiang, L.; Zhang, Z.; Yang, S. A 500-W wireless charging system with lightweight pick-up for unmanned aerial vehicles. IEEE Trans. Power Electron. 2020, 35, 7721–7724. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Y.; Jo, C.-H.; Park, S.-J.; Kim, D.-H. DC-link and switched capacitor control for varying coupling conditions in inductive power transfer system for unmanned aerial vehicles. IEEE Trans. Power Electron. 2021, 36, 5108–5120. [Google Scholar] [CrossRef]
- Song, Y.; Sun, X.; Wang, H.; Dong, W.; Ji, Y. Design of charging coil for unmanned aerial vehicle-enabled wireless power transfer. In Proceedings of the 2018 8th International Conference on Power and Energy Systems (ICPES), Colombo, Sri Lanka, 21–22 December 2018; pp. 268–272. [Google Scholar]
- Cai, C.; Liu, J.; Wu, S.; Zhang, Y.; Jiang, L.; Zhang, Z.; Yu, J. Development of a cross-type magnetic coupler for unmanned aerial vehicle IPT charging systems. IEEE Access 2020, 8, 67974–67989. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, K.; He, F.; Zhao, Z.; Lu, T.; Yuan, L. Closed-form oriented modeling and analysis of wireless power transfer system with constant-voltage source and load. IEEE Trans. Power Electron. 2016, 31, 3472–3481. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.; Tse, C.K.; Chen, Q. Analysis and comparison of secondary series- and parallel-compensated inductive power transfer systems operating for optimal efficiency and load-independent voltage-transfer ratio. IEEE Trans. Power Electron. 2014, 29, 2979–2990. [Google Scholar] [CrossRef]
- Liu, N.; Habetler, T.G. Design of a universal inductive charger for multiple electric vehicle models. IEEE Trans. Power Electron. 2015, 30, 6378–6390. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A double-sided LCC compensation network and its tuning method for wireless power transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Choi, B.G.; Sohn, Y.-H.; Lee, E.S.; Han, S.H.; Kim, H.R.; Rim, C.T. Coreless transmitting coils with conductive magnetic shield for wide range ubiquitous IPT. IEEE Trans. Power Electron. 2019, 34, 2539–2552. [Google Scholar] [CrossRef]
- Lee, E.S.; Choi, B.G.; Kim, M.Y.; Han, S.H. Optimal number of turns design of the IPT coils for laptop wireless charging. IEEE Access 2021, 9, 19548–19561. [Google Scholar] [CrossRef]
- Jiang, C.; Chau, K.T.; Liu, C.; Lee, C.H. An overview of resonant circuits for wireless power transfer. Energies 2017, 10, 894. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, C.; Song, J.; Chau, K.T. An effective sandwiched wireless power transfer system for charging implantable cardiac pacemaker. IEEE Trans. Ind. Electron. 2019, 66, 4108–4117. [Google Scholar] [CrossRef]
- ICNIRP. Guidelines for limiting exposure to time-varying electric and magnetic fields (1 Hz to 100 kHz). Health Phys. 2010, 99, 818–836. [Google Scholar] [CrossRef] [PubMed]
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and optimization of circular magnetic structures for lumped inductive power transfer systems. IEEE Trans. Power Electron. 2011, 26, 3096–3108. [Google Scholar] [CrossRef]
- Abiezer, T.; Carretero, C.; Boys, J.T.; Covic, G.A. Ferrite-less circular pad with controlled flux cancelation for EV wireless charging. IEEE Trans. Power Electron. 2017, 32, 8349–8359. [Google Scholar]
- Nayak, P.; Kishan, D.; Annaiah, P. Investigation of MI between circular spiral coils with misalignments for EV battery charging. IET Sci. Meas. Technol. 2018, 12, 844–850. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
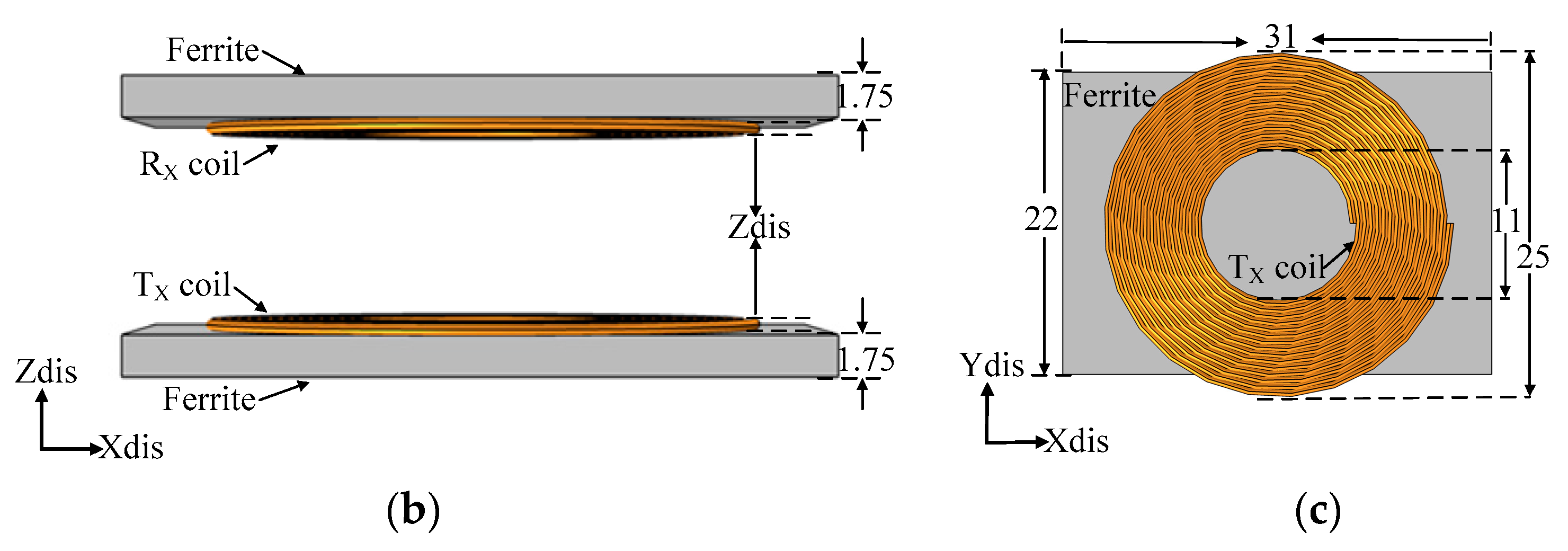
| Turns of transmitting and receiving coils | 15 |
| Diameter of transmitting coil | 25 mm |
| Diameter of receiving coil | 20 mm |
| Diameter of the single-turn coil | 0.5 mm |
| Cross-section of single-turn coil | 0.2 mm2 |
| Size of PQ core (L × W × H) | 32 × 22 × 15.175 mm |
| Size of I core plate (L × W × H) | 31 × 22 × 1.75 mm |
| Permeability of ferrite core | 3300 |
| Symbol | Parameter | Value |
|---|---|---|
| Uin | Input DC voltage | 80 V |
| f | System working frequency | 100 kHz |
| LTx | Inductance of transmitting coil | 123.98 µH |
| LRx | Inductance of receiving coil | 118.47 µH |
| CTx | Compensation capacitance of transmitter | 20.57 nF |
| CRx | Compensation capacitance of receiver | 21.38 nF |
| RTx | Resistance of transmitting coil | 0.201 Ω |
| RRx | Resistance of receiving coil | 0.165 Ω |
| M | Mutual inductance | 119.24 µH |
| k | Coupling coefficient | 0.984 |
| RL | Resistance of load | 100 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Lu, J.; Stegen, S. Magnetic Coupler Optimization for Inductive Power Transfer System of Unmanned Aerial Vehicles. Energies 2021, 14, 7024. https://doi.org/10.3390/en14217024
Li X, Lu J, Stegen S. Magnetic Coupler Optimization for Inductive Power Transfer System of Unmanned Aerial Vehicles. Energies. 2021; 14(21):7024. https://doi.org/10.3390/en14217024
Chicago/Turabian StyleLi, Xiaokun, Junwei Lu, and Sascha Stegen. 2021. "Magnetic Coupler Optimization for Inductive Power Transfer System of Unmanned Aerial Vehicles" Energies 14, no. 21: 7024. https://doi.org/10.3390/en14217024
APA StyleLi, X., Lu, J., & Stegen, S. (2021). Magnetic Coupler Optimization for Inductive Power Transfer System of Unmanned Aerial Vehicles. Energies, 14(21), 7024. https://doi.org/10.3390/en14217024