
Contributions to Modeling, Simulation and Controlling of a Pumping System Powered by a Wind Energy Conversion System



Abstract
:
1. Introduction
2. Mathematical Modeling
2.1. WECS Modeling
2.1.1. Wind Turbine Modeling
2.1.2. Drive Train Modeling
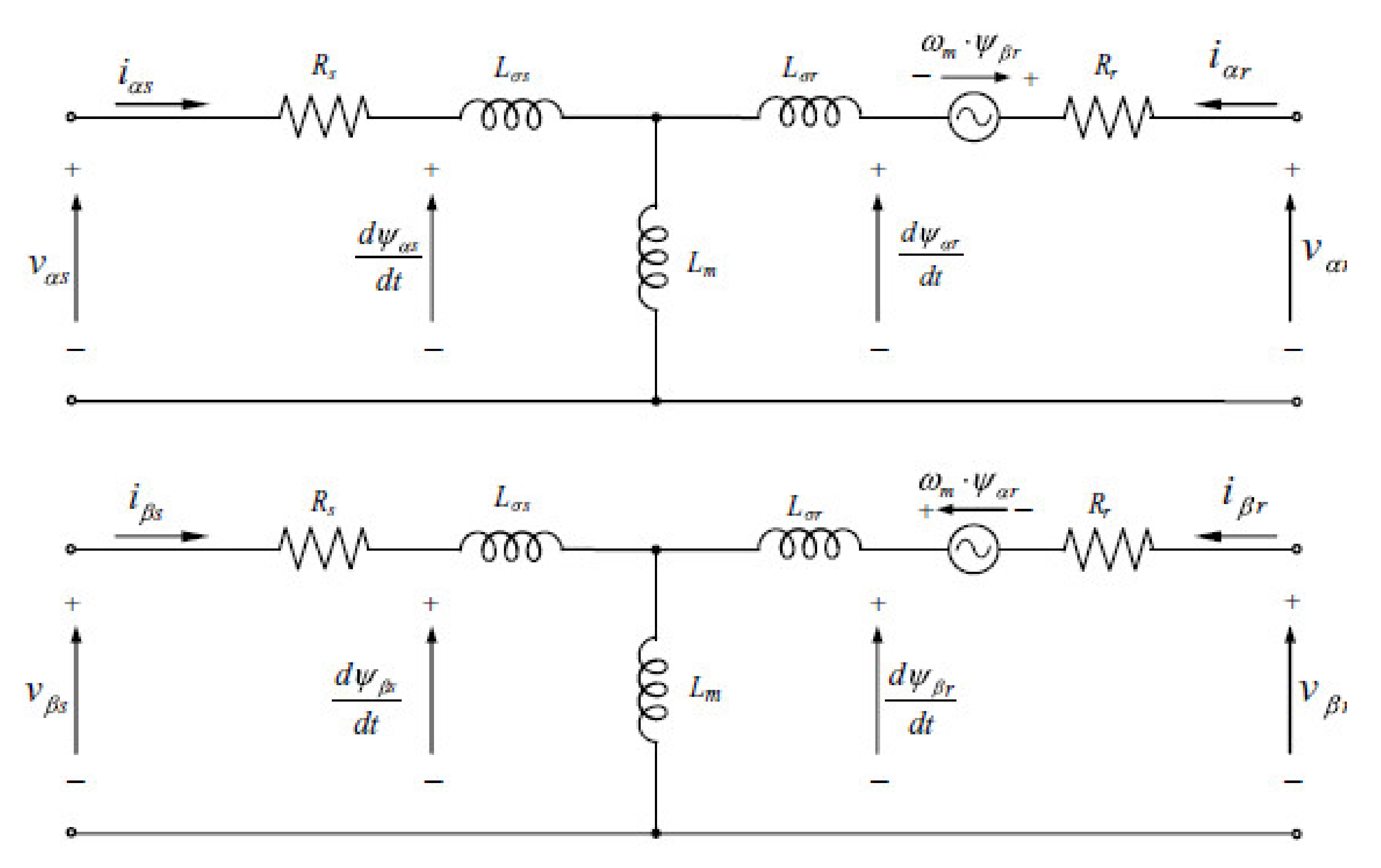
2.1.3. DFIG—Doubly Fed Induction Generator Modeling
2.1.4. Tower
2.1.5. Pitch Actuator
2.2. Pumping System Modeling
2.2.1. IM (Induction Motor) Modeling
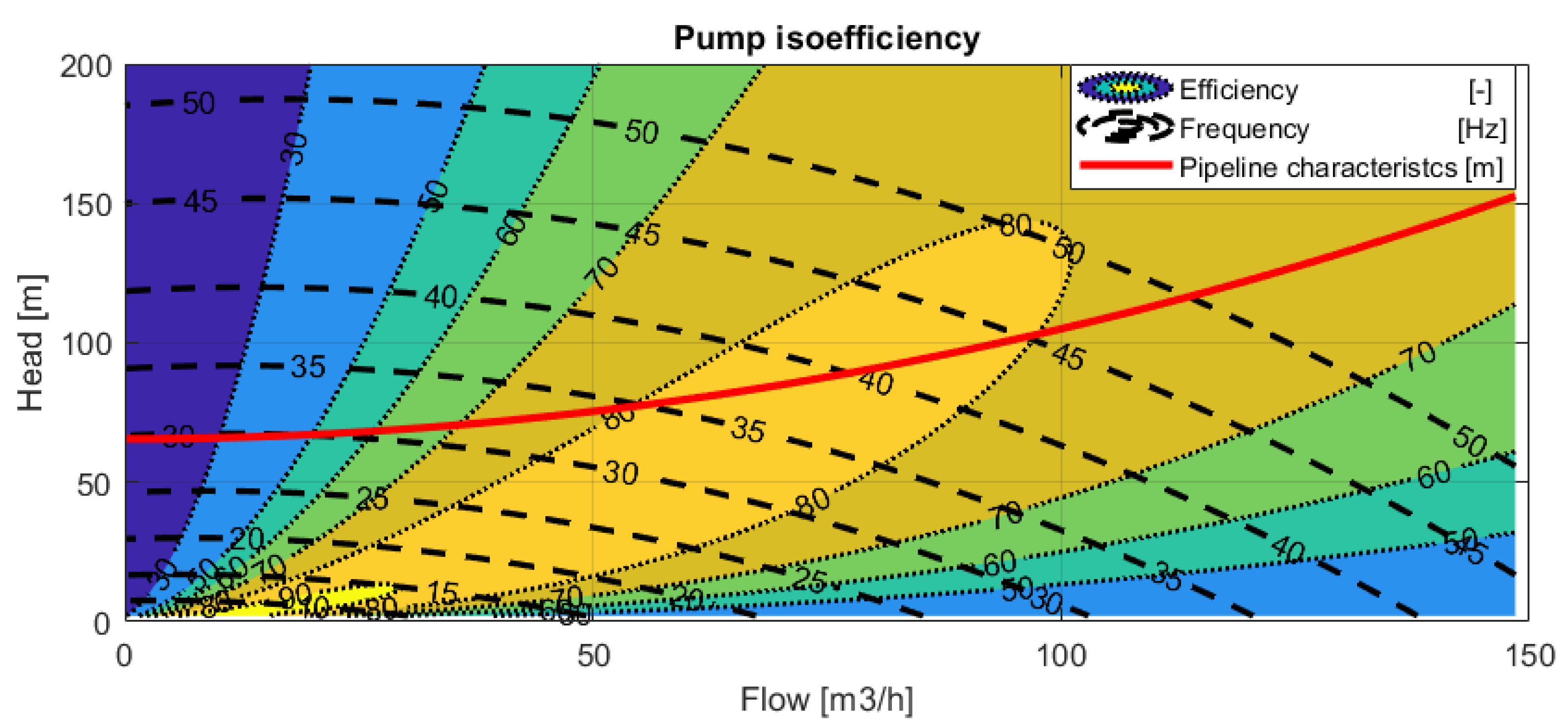
2.2.2. Variable Speed Centrifugal Pump
2.2.3. Water Distribution and Irrigation System
3. Control Strategy
3.1. General System Controller
3.2. WECS Controller
3.2.1. DFIG Rotor Side Controller
3.2.2. DFIG Grid Side Controller
3.2.3. WT Generator Torque Controller
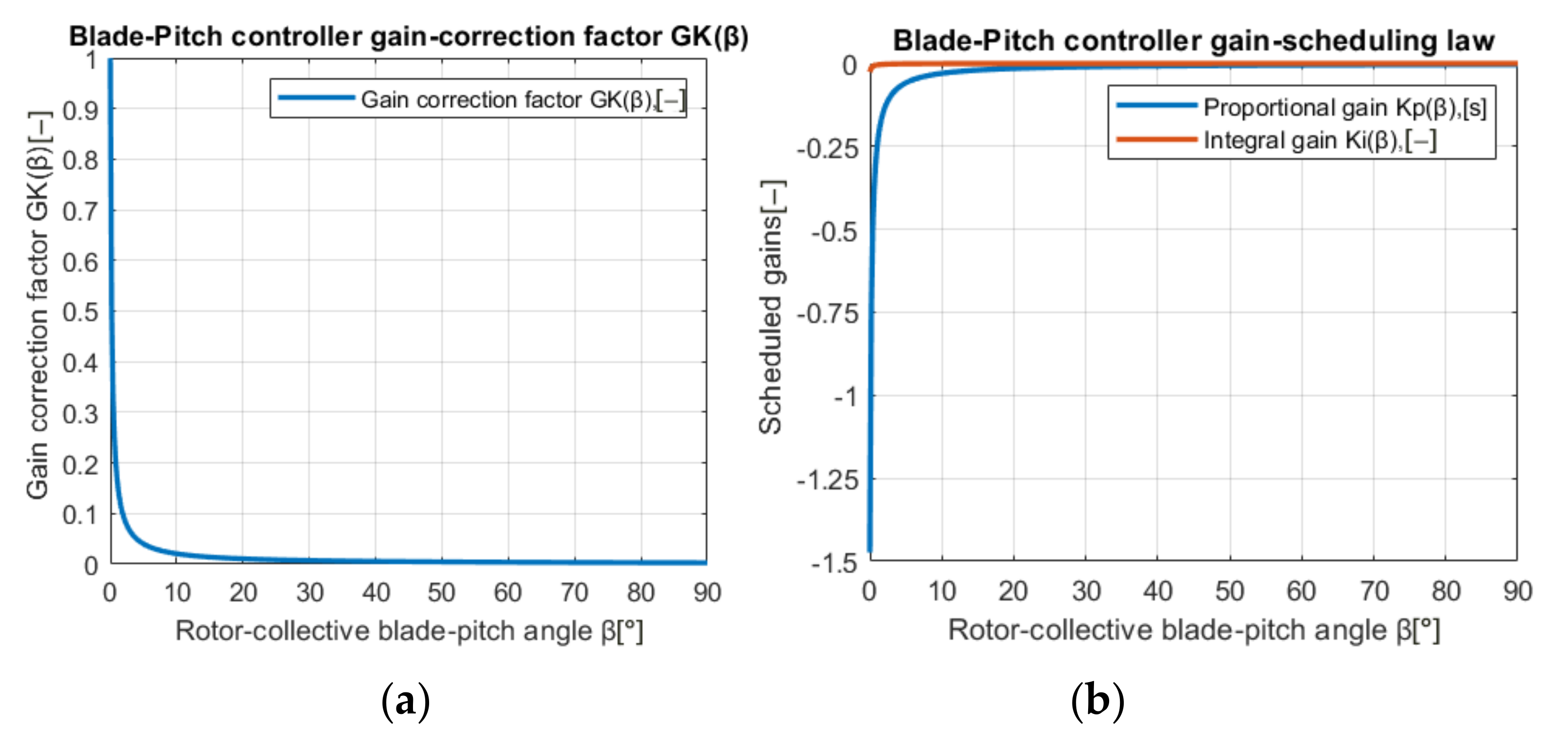
3.2.4. WT Blade Pitch Controller
3.3. Pumping System Controller
3.3.1. IM Controller
3.3.2. Pump Speed Controller
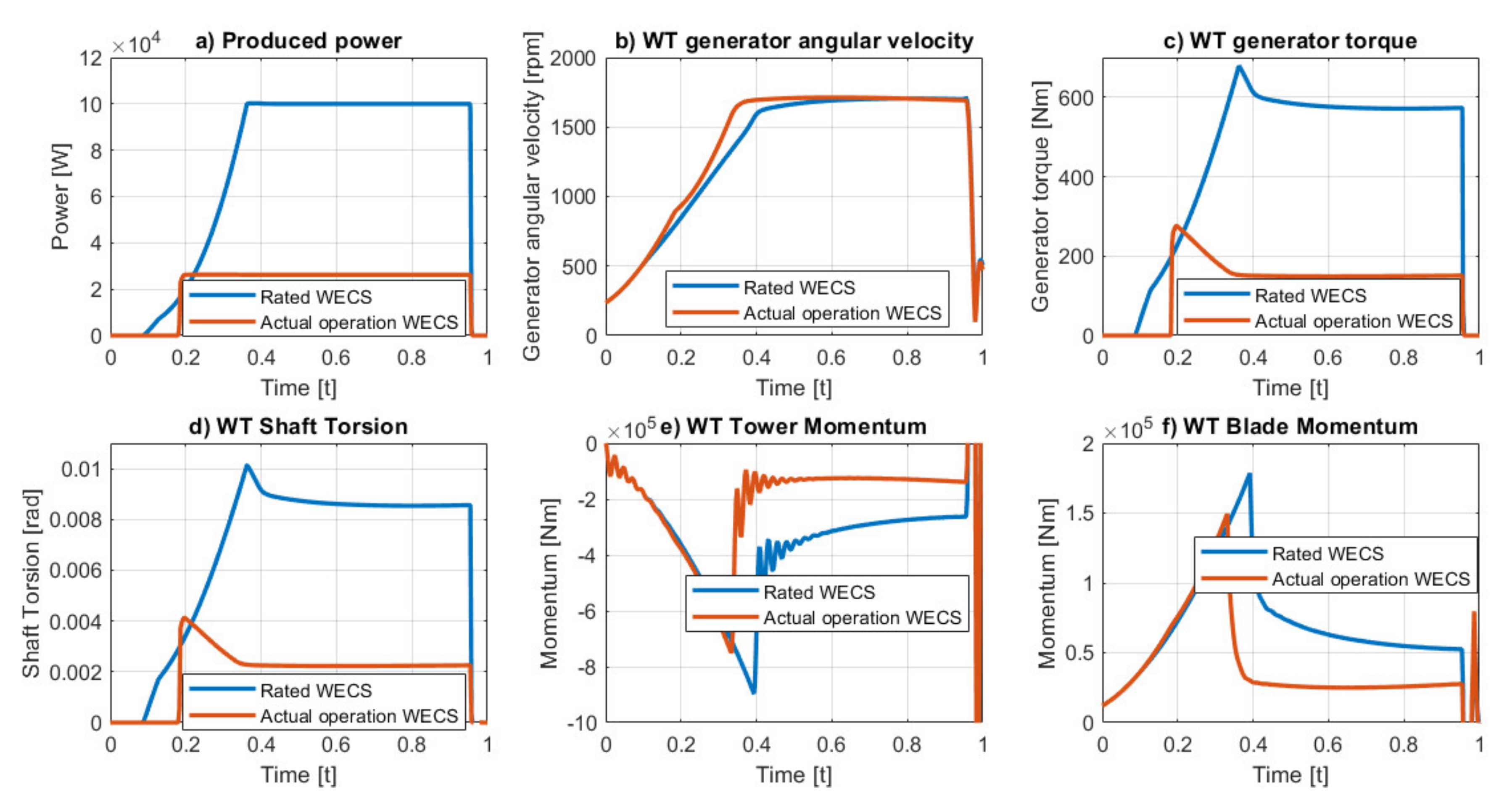
4. Simulation Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Notation | Parameter Description | Value |
|---|---|---|---|
| WECS WT | v | Wind speed in front of the WT rotor | 4 to 26 [m/s] |
| vrot | Average wind speed acting on the WT rotor | 4 to 26 [m/s] | |
| vcut.in | Cut-in wind speed in front of the WT rotor | 5 [m/s] | |
| vrated | Rated wind speed in front of the WT rotor | 13 [m/s] | |
| vcut.out | Cut out wind speed in front of the WT rotor | 25 [m/s] | |
| v | Wind speed in front of the WT rotor | 4 to 26 [m/s] | |
| WT rotor tip speed ratio | 3.923 [rad/s] | ||
| R | WT rotor radius | 10.5 [m] | |
| Nominal WT rotor angular velocity | 4.857 [rad/s] | ||
| Nominal WT rotor torque | 20,588 [N·m] | ||
| Average air density over the WT rotor | 1.2231 [kg/m3] | ||
| Power coefficient lookup table [27] | [-] | ||
| Thrust coefficient lookup table [27] | [-] | ||
| Nominal blade pitching angle | 0 [°] | ||
| WT hub height | 38 [m] | ||
| WECS Drive Train | WT rotor inertia | 115,762 [kg·m2] | |
| WT low-speed shaft spring constant | 2,208,535 [N·m/rad] | ||
| WT low-speed shaft damping constant | 15,820 [kg/s] | ||
| N | Gear ratio | 33 [-] | |
| WECS DFIG | DFIG inertia | 10.682 [kg·m2] | |
| DFIG poles | 4 [-] | ||
| udfig | DFIG stator/rotor turns ratio | 1 [-] | |
| fdfig | DFIG rated frequency | 50 [Hz] | |
| Vdfig | DFIG rated voltage | 400 [V] | |
| Idfig | DFIG rated current | 145 [A] | |
| DFIG rated angular velocity | 1500 [rpm] | ||
| Rdfig.S | DFIG stator resistance | 0.08 [Ω] | |
| Rdfig.R | DFIG rotor resistance | 0.008 [Ω] | |
| Ldfig.m | DFIG magnetizing induction | 0.007 [H] | |
| Ldfig.R | DFIG rotor inductance | 0.074 [H] | |
| Ldfig.S | DFIG stator inductance | 0.074 [H] | |
| Vbus | DC bus voltage referred to the DFIG stator | 690 [V] | |
| Pwecs | DFIG rated power | 100 [kW] | |
| WECS Tower | mwecs | WECS mass | 21 [tons] |
| Tower height | 35 [m] | ||
| Tower damping ratio | 0.08 [-] | ||
| Tower first eigenfrequency | 0.35 [Hz] | ||
| WECS Pitch Actuator | τβ | Pitch actuator time constant | 0.1 [s] |
| λβ | Pitch actuator delay | 0.1 [s] | |
| Kβ | Proportional gain of the Pitch regulator | 10 [-] | |
| βref | Pitch angle reference | 0 [°] | |
| PS IM | IM rated power | 51 [kW] | |
| IM poles | 2 [-] | ||
| uIM | IM stator/rotor turns ratio | 1 [-] | |
| fdfig | IM rated frequency | 50 [Hz] | |
| Vdfig | IM rated voltage | 400 [V] | |
| Idfig | IM rated current | 101 [A] | |
| IM rated angular velocity | 2910 [rpm] | ||
| Rim.s | IM stator resistance | 0.095 [Ω] | |
| Rim.r | IM rotor resistance | 0.063 [Ω] | |
| Lim.m | IM magnetizing induction | 0.032 [H] | |
| Lim.r | IM rotor inductance | 0.034 [H] | |
| Lim.s | IM stator inductance | 0.034 [H] | |
| PS Centrifugal Pump | Pdem | Nominal power demanded by PS to WECS | 32.357 [kW] |
| Pps | Nominal PS power | 26.2 [kW] | |
| Pump nominal angular velocity | 2400 [rpm] | ||
| A | Pump characteristic curve 1st coefficient | 185.212 [m] | |
| B | Pump characteristic curve 2nd coefficient | 0.261 [h/m2] | |
| C | Pump characteristic curve 3rd coefficient | −0.008 [h2/m5] | |
| D | Pump efficiency curve 1st coefficient | 1.8274 [h/m3] | |
| E | Pump efficiency curve 2nd coefficient | −0.0104 [h2/m6] | |
| H0 | Nominal pump operating head | 87.312 [m] | |
| Q0 | Nominal pump operating flow | 86.56 [m3/h] | |
| η0 | Nominal pump efficiency | 0.81 [-] | |
| k | Head loss coefficient | 0.00395 [h2/m5] | |
| Hg | Static head | 80.5 [m] |
| Local Controller | Notation | Parameter Description | Value |
|---|---|---|---|
| WECS DFIG rotor side controller | kpr | P gain of the DFIG rotor side regulator | 0.0635 [-] |
| kir | I gain of the DFIG rotor side regulator | 0.635 [-] | |
| WECS DFIG grid side controller | kpg | P gain of the DFIG grid side regulator | 0.002 [-] |
| kig | I gain of the DFIG grid side regulator | −0.002 [-] | |
| WECS WT generator torque controller | Optimal generator constant | 0.0314 [-] | |
| 1st linear coefficient Equations (1) and (2) region | 8.34 [-] | ||
| 2nd linear coefficient Equations (1) and (2) region | −393.174 [-] | ||
| 1st linear coefficient Equations (2) and (3) region | 34.823 [-] | ||
| 2nd linear coefficient Equations (2) and (3) region | −4889.242 [-] | ||
| WECS WT blade pitch controller | Kpwecs | Pitch controller P gain at the rated point | −0.7395 [-] |
| Kiwec | Pitch controller I gain at the rated point | −0.0129 [-] | |
| PS IM controller | kpps1 | P gain of the PS IM controller | 120 [-] |
| kips1 | I gain of the PS IM controller | 12,000 [-] | |
| PS Pump speed controller | kpps2 | P gain of the PS pump speed controller | 1 [-] |
| kips2 | I gain of the PS pump speed controller | 1.2 [-] |
References
- Stoyanov, L.; Bachev, I.; Zarkov, Z.; Lazarov, V.; Notton, G. Multivariate Analysis of a Wind–PV-Based Water Pumping Hybrid System for Irrigation Purposes. Energies 2021, 14, 3231. [Google Scholar] [CrossRef]
- Ursachi, A.; Bordeasu, D. Smart Grid Simulator, World Academy of Science, Engineering and Technology. Int. J. Civ. Archit. Sci. Eng. 2014, 8, 488–491. [Google Scholar] [CrossRef]
- Ronad, B.F.; Jangamshetti, S.H. Optimal cost analysis of wind-solar hybrid system powered AC and DC irrigation pumps using HOMER. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; Volume 5, pp. 1038–1042. [Google Scholar] [CrossRef]
- Sarasúa, J.I.; Martínez-Lucas, G.; Platero, C.A.; Sánchez-Fernández, J.Á. Dual Frequency Regulation in Pumping Mode in a Wind–Hydro Isolated System. Energies 2018, 11, 2865. [Google Scholar] [CrossRef] [Green Version]
- Jamii, J.; Mimouni, F. Model of wind turbine-pumped storage hydro plant. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Li, H.; Zheng, C.; Lv, S.; Liu, S.; Huo, C. Research on optimal capacity of wind power based on coordination with pumped storage power. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 1214–1218. [Google Scholar] [CrossRef]
- Ouchbel, T.; Zouggar, S.; Elhafyani, M.L.; Seddik, M.; Oukili, M.; Aziz, A.; Kadda, F.Z. Power maximization of an asynchronous wind turbine with a variable speed feeding a centrifugal pump. Energy Convers. Manag. 2014, 78, 976–984. [Google Scholar] [CrossRef]
- Barara, M.; Bennassar, A.; Abbou, A.; Akherraz, M.; Bossoufi, B. Advanced Control of Wind Electric Pumping System for Isolated Areas Application. Int. J. Power Electron. Drive Syst. 2014, 4, 567–577. [Google Scholar] [CrossRef]
- Zeddini, M.A.; Pusca, R.; Sakly, A.; Mimouni, M.F. MPPT control of Wind Pumping Plant Using Induction Generator. In Proceedings of the 14th International conference on Sciences and Techniques of Automatic Control & Computer Engineering STA, Sousse, Tunisia, 20–22 December 2013; pp. 438–442. [Google Scholar]
- Harrouz, A.; Dahbi, A.; Harrouz, O.; Benatiallah, A. Control of wind turbine based of PMSG connected to water pumping system in South of Algeria. In Proceedings of the 3rd International Symposium on Environmental Friendly Energies and Applications (EFEA), Paris, France, 19–21 November 2014; pp. 22–25. [Google Scholar] [CrossRef]
- Hammerum, H. A Fatigue Approach to Wind Turbine Control; Technical University of Denmark: Kongens Lyngby, Denmark, 2006; pp. 5–22. [Google Scholar]
- Hammerum, H.; Brath, P.; Poulsen, N.K. A fatigue approach to wind turbine control. J. Phys. Conf. Ser. 2007, 75, 012081. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Wang, L.; Li, H. Experiments and Simulation on a Late-Model Wind-Motor Hybrid Pumping Unit. Energies 2020, 13, 994. [Google Scholar] [CrossRef] [Green Version]
- Grunnet, J.D.; Soltani, M.N.; Knudsen, T.; Kragelund, M.N.; Bak, T. Aeolus Toolbox for Dynamics Wind Farm Model, Simulation and Control. In Proceedings of the European Wind Energy Conference and Exhibition, EWEC 2010: Conference Proceedings, Warszawa, Poland, 20–23 April 2010; pp. 3119–3129. [Google Scholar]
- Abad, G.; López, J.; Rodríguez, M.A.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 155–238. [Google Scholar]
- Haţiegan, C.; Chioncel1, C.P.; Răduca, E.; Popescu, C.; Pădureanu, I.; Jurcu, M.R.; Bordeaşu, D.; Trocaru, S.; Dilertea, F.; Bădescu, O.; et al. Determining the operating performance through electrical measurements of a hydro generator. IOP Conf. Ser. Mater. Sci. Eng. 2017, 163, 012031. [Google Scholar] [CrossRef] [Green Version]
- Abu-Rub, H.; Malinowski, M.; Al-Haddad, K. Power Electronics for Renewable Energy Systems, Transportation and Industrial Applications; IEEE Press and John Wiley & Sons Ltd.: Chichester, UK, 2014; pp. 277–356. [Google Scholar]
- Janevska, G.; Bitola, R.M. Mathematical Modeling of Pump System. Electron. Int. Interdiscip. Conf. 2013, 2, 455–458. [Google Scholar]
- Yang, Z.; Soleiman, K.; Løhndorf, B. Energy Efficient Pump Control for an Offshore Oil Processing System. IFAC Proc. Vol. 2012, 45, 257–262. [Google Scholar] [CrossRef] [Green Version]
- Sârbu, I.; Borza, I. Energetic optimization of water pumping in distribution systems. Period. Polytech. Ser. Mech. Eng. 1998, 42, 141–152. [Google Scholar]
- White, F.M. Chapter 11 Turbomachinery. In Fluid Mechanics, 7th ed.; McGraw-Hill: New York, NY, USA, 2011; pp. 776–777. [Google Scholar]
- Caprari, Submersible Electric Pump E8P95/7ZC+MAC870-8V Technical Data Sheet. 2019. Available online: https://ipump.caprarinet.net/ (accessed on 9 October 2021).
- Li, W.; Ji, L.; Shi, W.; Zhou, L.; Chang, H.; Agarwal, R.K. Expansion of High Efficiency Region of Wind Energy Centrifugal Pump Based on Factorial Experiment Design and Computational Fluid Dynamics. Energies 2020, 13, 483. [Google Scholar] [CrossRef] [Green Version]
- Abad, G. Power Electronics and Electric Drives for Traction Applications; John Wiley & Sons: Chichester, UK, 2017; pp. 37–98, 149–185. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009; pp. 17–27.
- Sul, S. Control of Electric Machine Drive Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 92–96, 236–243. [Google Scholar]
- Fuhrländer, F.L. Fuhrländer FL 100 kW Wind Turbine Technical Data Sheet. 2021. Available online: https://en.wind-turbine-models.com/turbines/279-fuhrlaender-fl-100-astos/ (accessed on 9 October 2021).




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bordeașu, D.; Proștean, O.; Hatiegan, C. Contributions to Modeling, Simulation and Controlling of a Pumping System Powered by a Wind Energy Conversion System. Energies 2021, 14, 7696. https://doi.org/10.3390/en14227696
Bordeașu D, Proștean O, Hatiegan C. Contributions to Modeling, Simulation and Controlling of a Pumping System Powered by a Wind Energy Conversion System. Energies. 2021; 14(22):7696. https://doi.org/10.3390/en14227696
Chicago/Turabian StyleBordeașu, Dorin, Octavian Proștean, and Cornel Hatiegan. 2021. "Contributions to Modeling, Simulation and Controlling of a Pumping System Powered by a Wind Energy Conversion System" Energies 14, no. 22: 7696. https://doi.org/10.3390/en14227696