
Control Performance Improvement of Hydro-Viscous Clutch Based on Fuzzy-PID Controller


Abstract
:1. Introduction
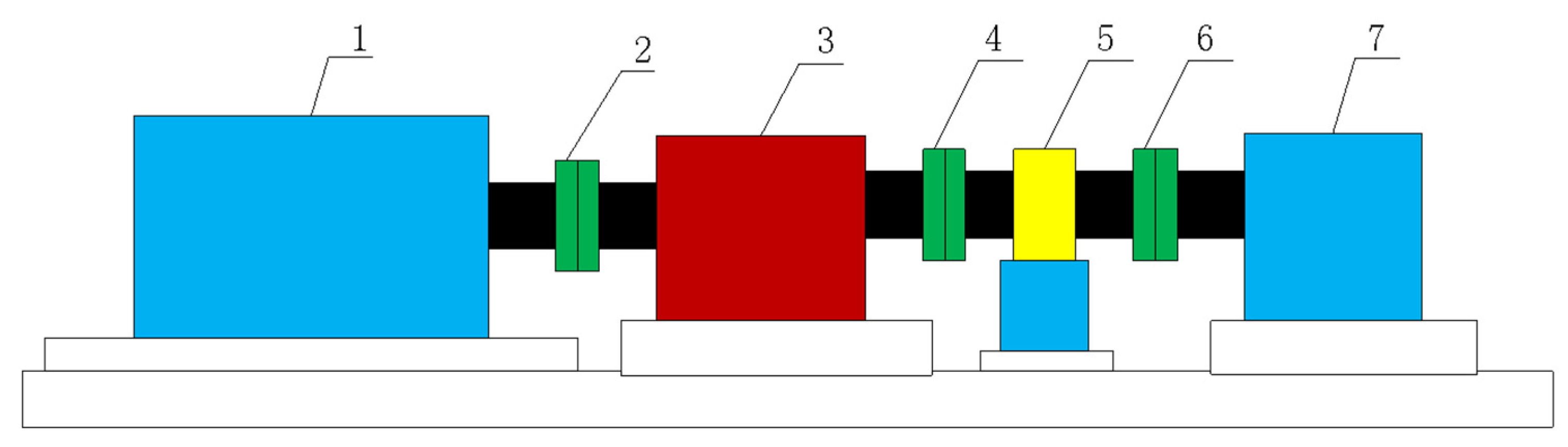
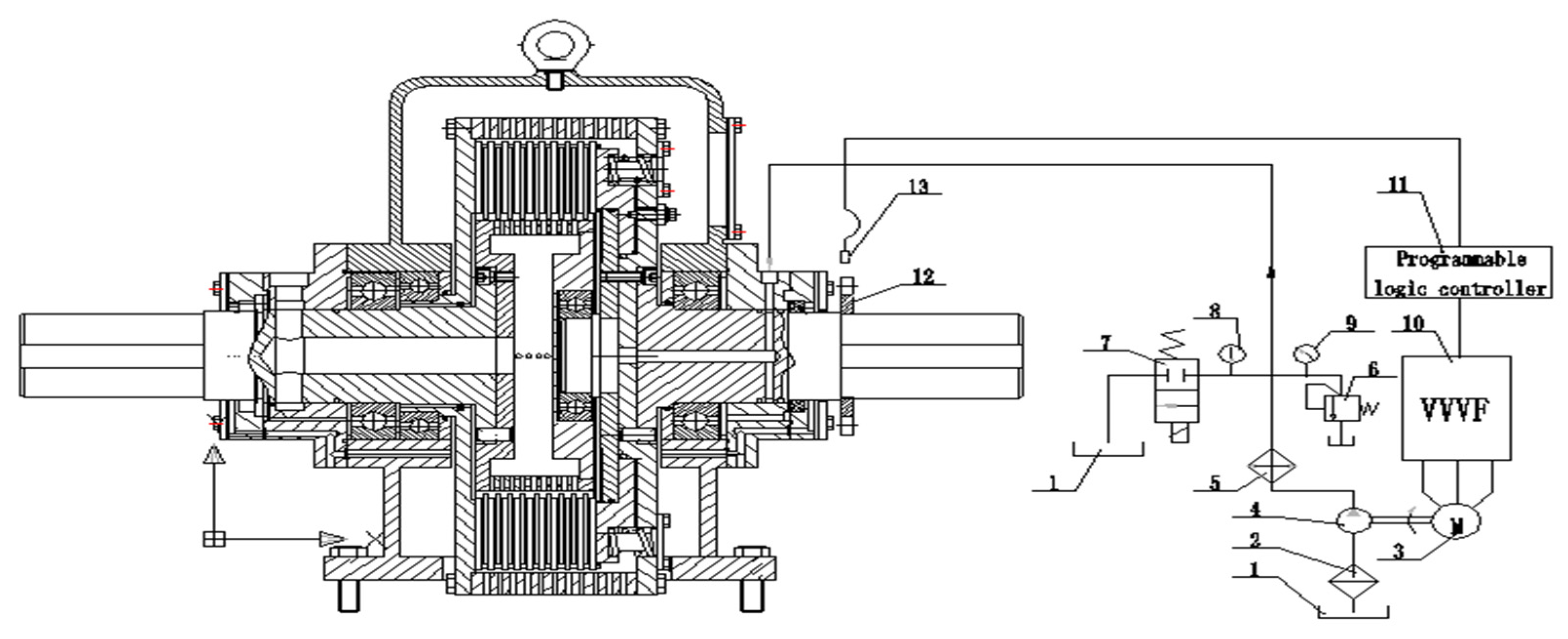
2. Overall and Detailed Design for HVC’s Control System
3. Modeling and Simulation of the Pump Control System of HVC
3.1. Frequency Converter
3.2. Gear Pump and the Cylinder of HVC
3.3. Gear Pump Motor
3.4. Modeling of HVC
3.5. Programmable Logic Controller
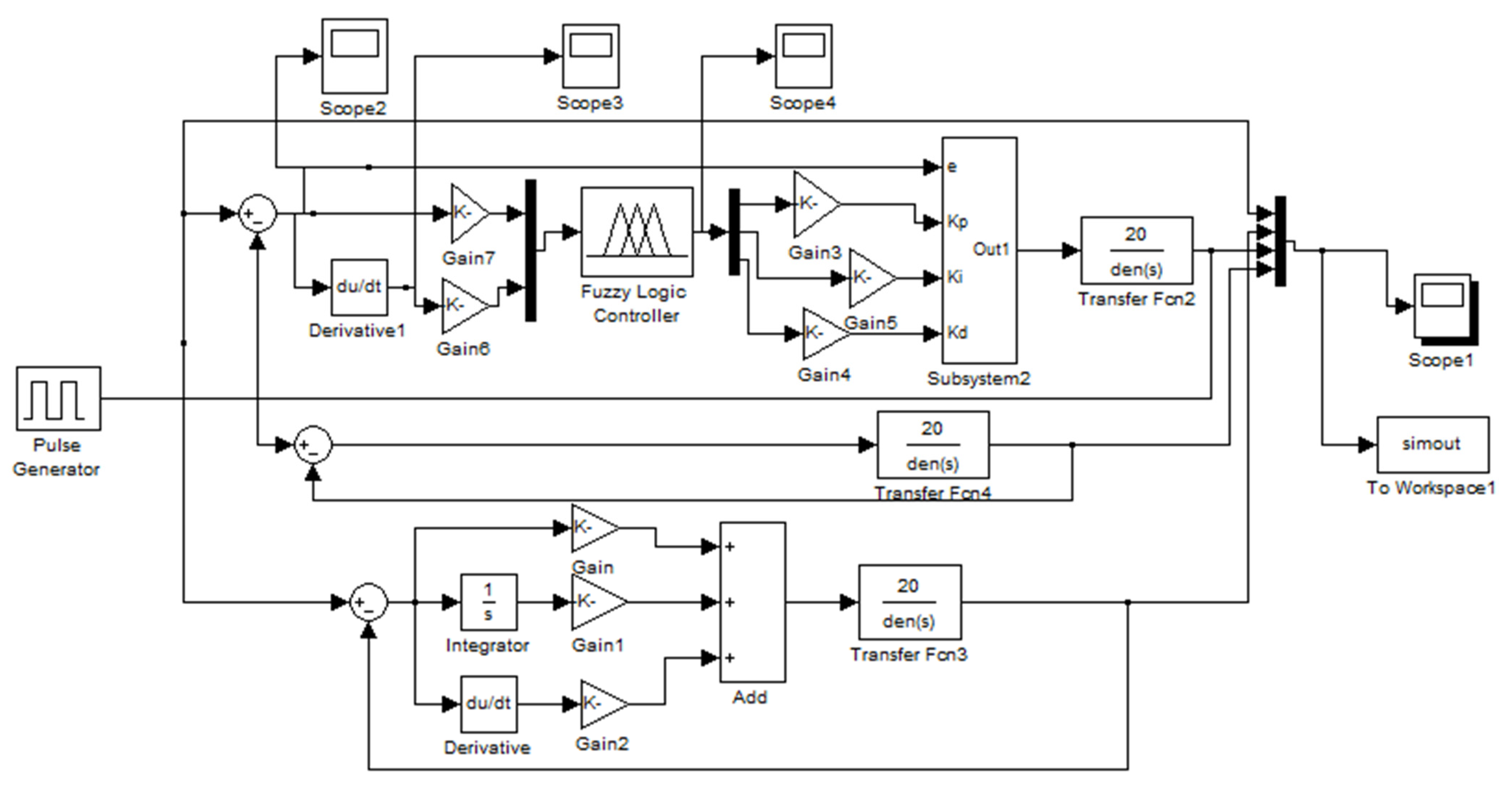
3.6. Simulation of the New System
4. Experiment Results
- (1)
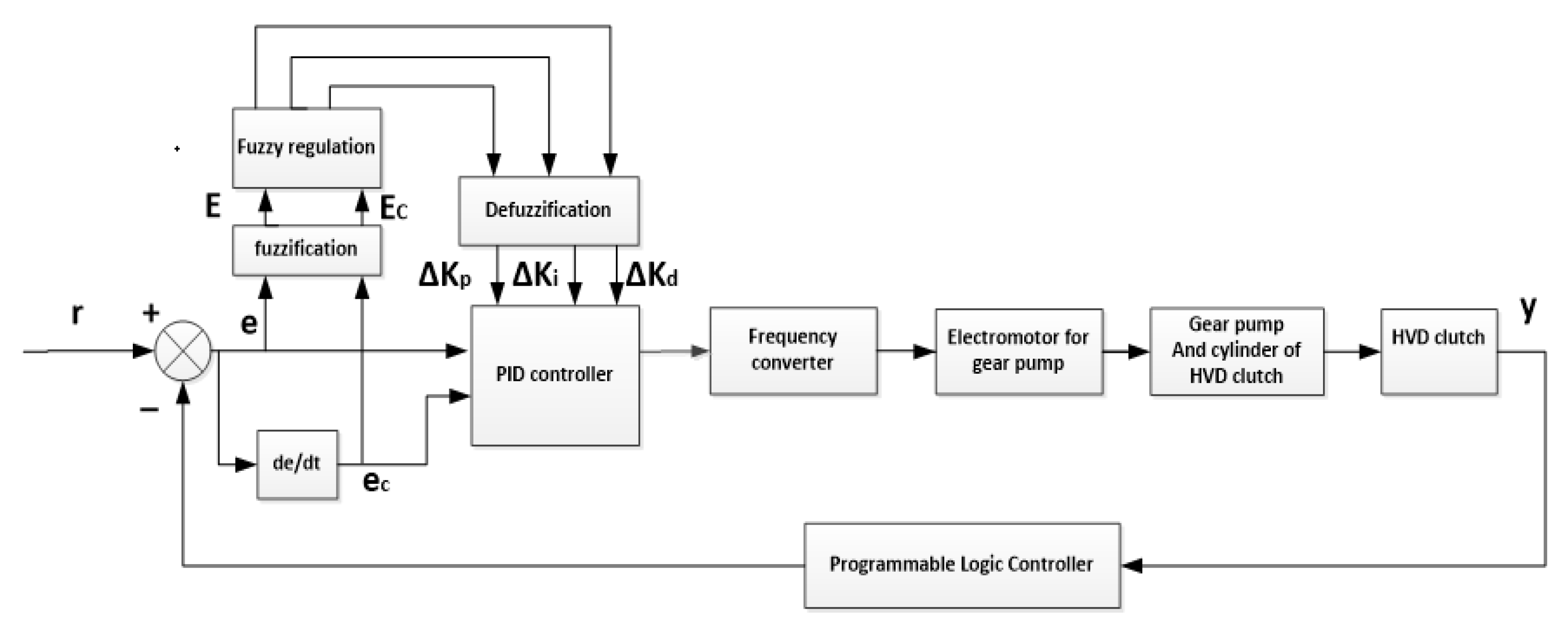
- Calculate the error “e” between the actual value of pipe pressure of waterworks and the feedback value. The real-time pipe pressure value can be obtained through the pressure transmitter, and then the error of pipe pressure can be obtained by comparing with the target pressure value of the waterworks.
- (2)
- Calculate the error change rate “de/dt”. The error is differentiated to calculate the change of error in an A/D sampling period.
- (3)
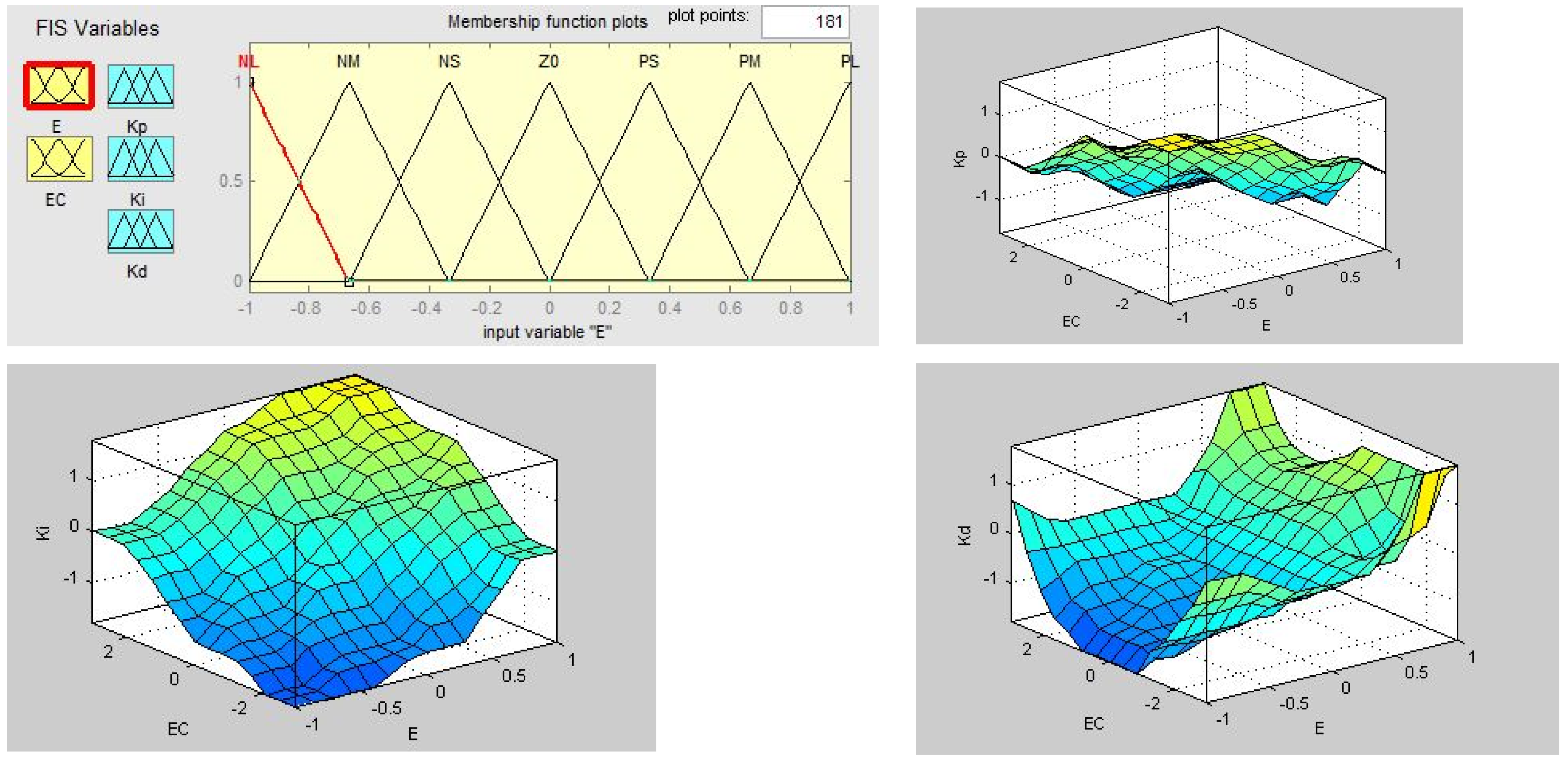
- Fuzzification of input. The obtained accurate error “e” and error change rate “ec” are fuzzed into fuzzy quantities.
- (4)
- Establish control rules. Establish the strategies required in the control with the knowledge of experts or the experience of field operators, as shown in Table 2.
- (5)
- Fuzzy inference. The fuzzy inference input variables E and EC are used as the inputs of the fuzzy inference part, and then the fuzzy inference is carried out by E, EC and the control rule R according to the inference synthesis rule to obtain the fuzzy control quantity U.
- (6)
- Defuzzification. In order to apply accurate control to the controlled object, the fuzzy control quantity must be transformed into an accurate quantity, that is, defuzzification.
- (7)
- Real time regulation of PID control parameters. After the fuzzy control quantity is transformed into an accurate quantity, the three control parameters Kp, Ki and Kd of PID are modified in real-time to make the control system reach the optimal control state.
- (8)
- Regulation of frequency converter output frequency. The three control parameters of PID are modified in real time to adjust the output frequency of frequency converter and make the oil pump motor of control oil circuit work at an appropriate frequency, so as to realize the regulation of the output speed of HVC.
- (9)
- Regulation of the pipe pressure of waterworks. By changing the working frequency of the oil pump motor in the control oil circuit, the output speed of the hydro-viscous clutch (i.e., the speed of the water pump) is changed to adjust the water supply, so as to realize the regulation of the pipe pressure of waterworks.
5. Conclusions
- (1)
- A new pump control system which is composed of a frequency converter, an-electric motor and a gear pump was used to replace the proportional relief valve for HVC, which can solve the blockage and dead-zone problem of the valve control system.
- (2)
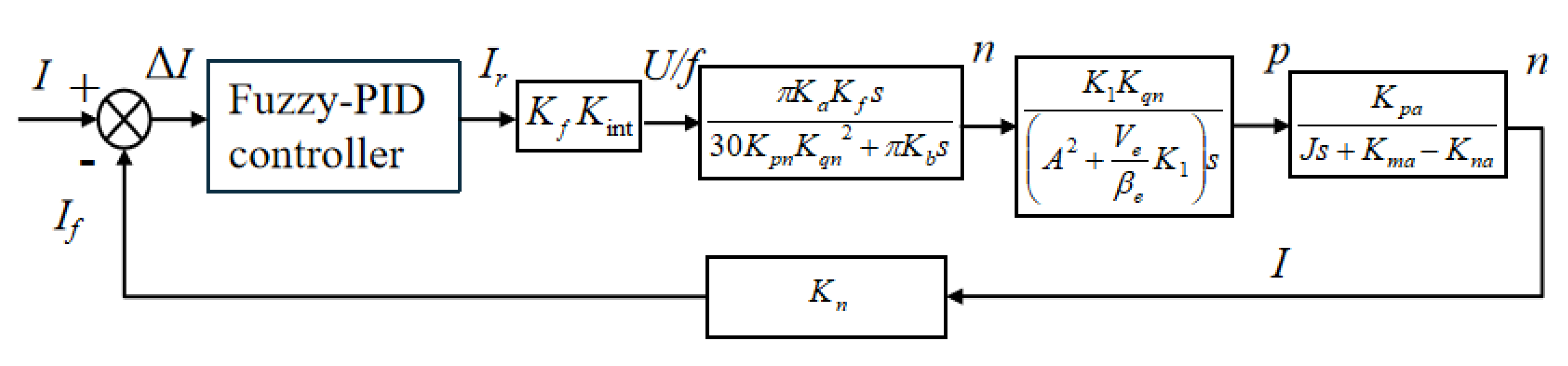
- A mathematical model of the pump control system was established, transfer function of which can be simplified to a second order system.
- (3)
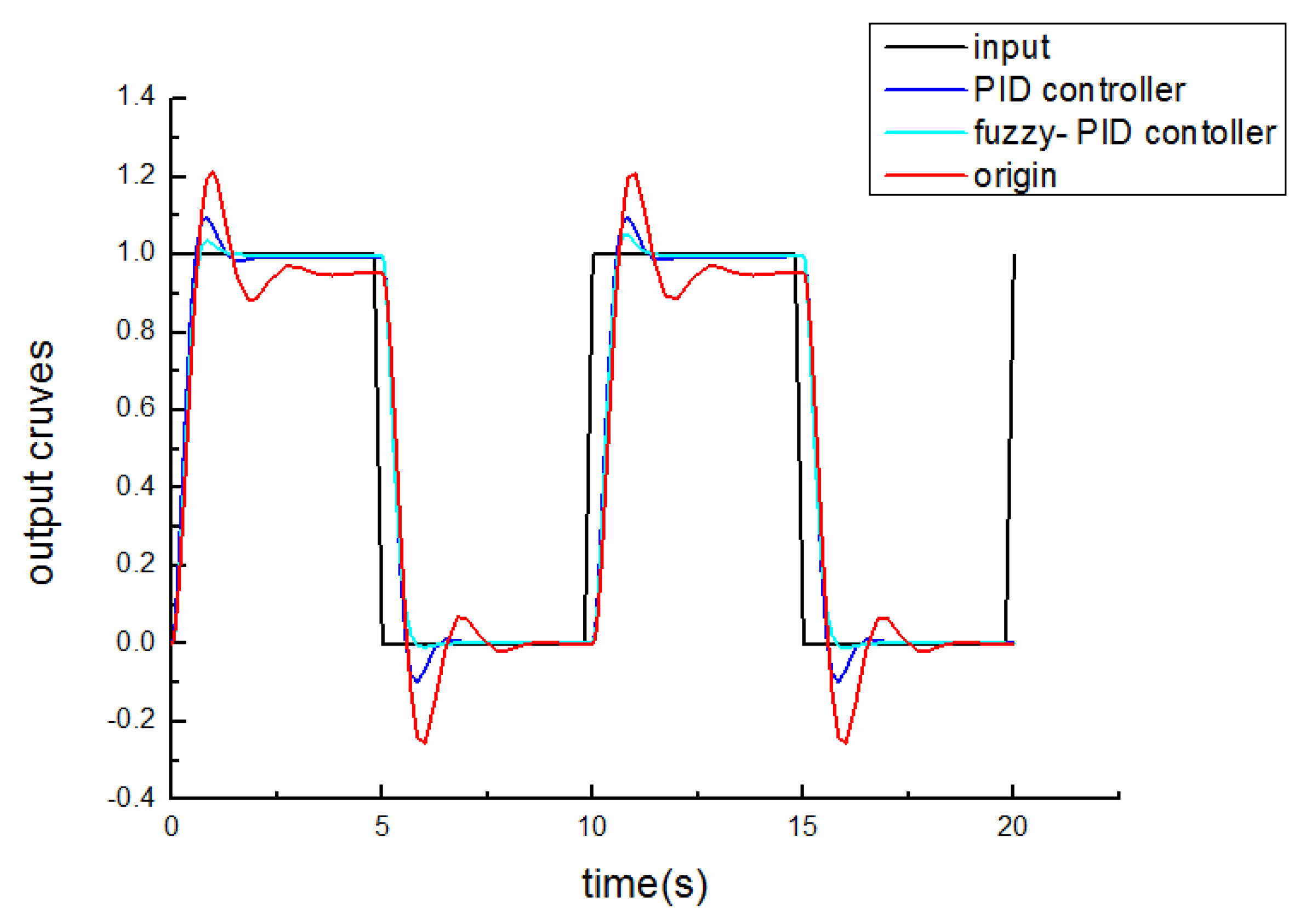
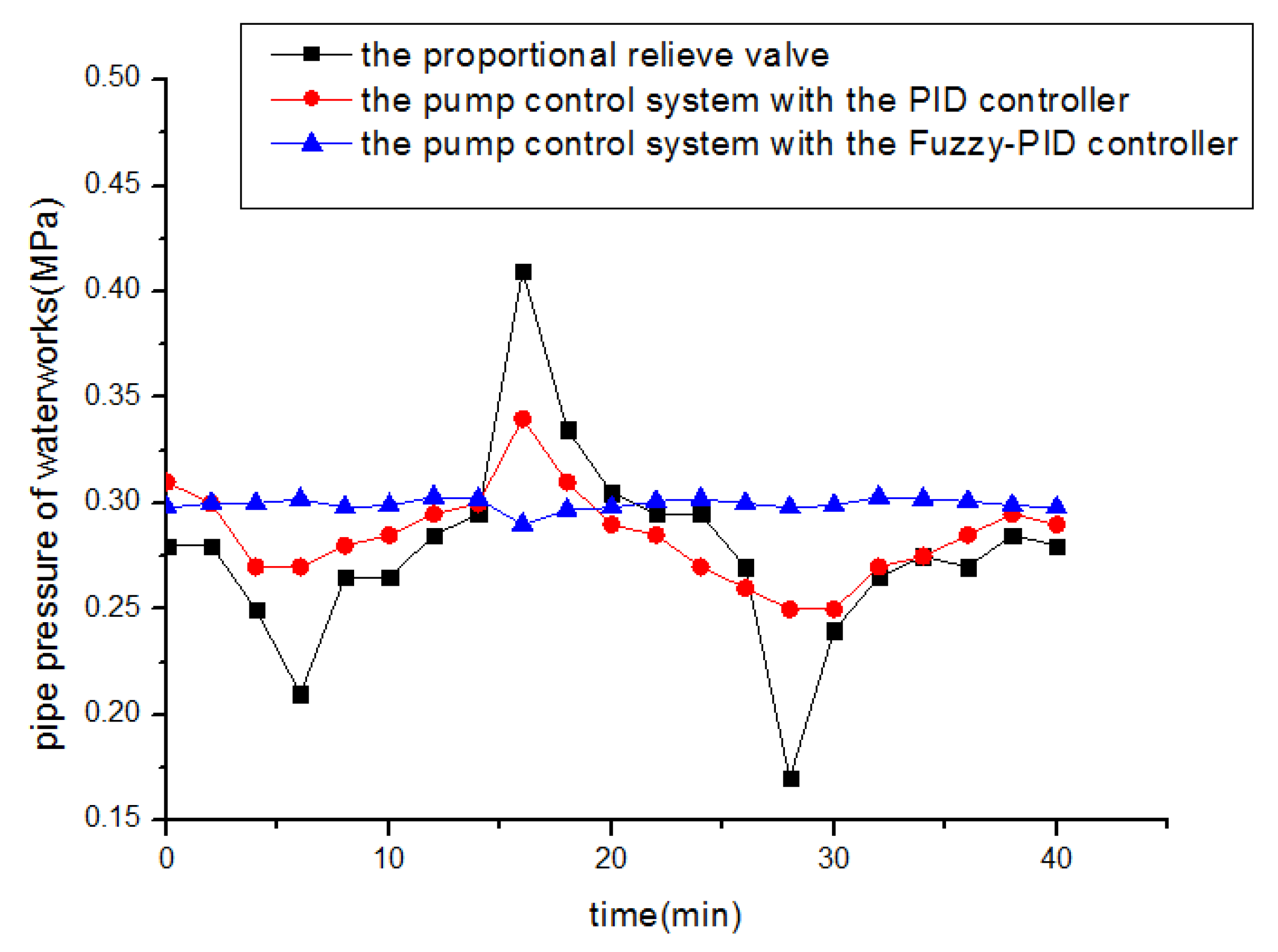
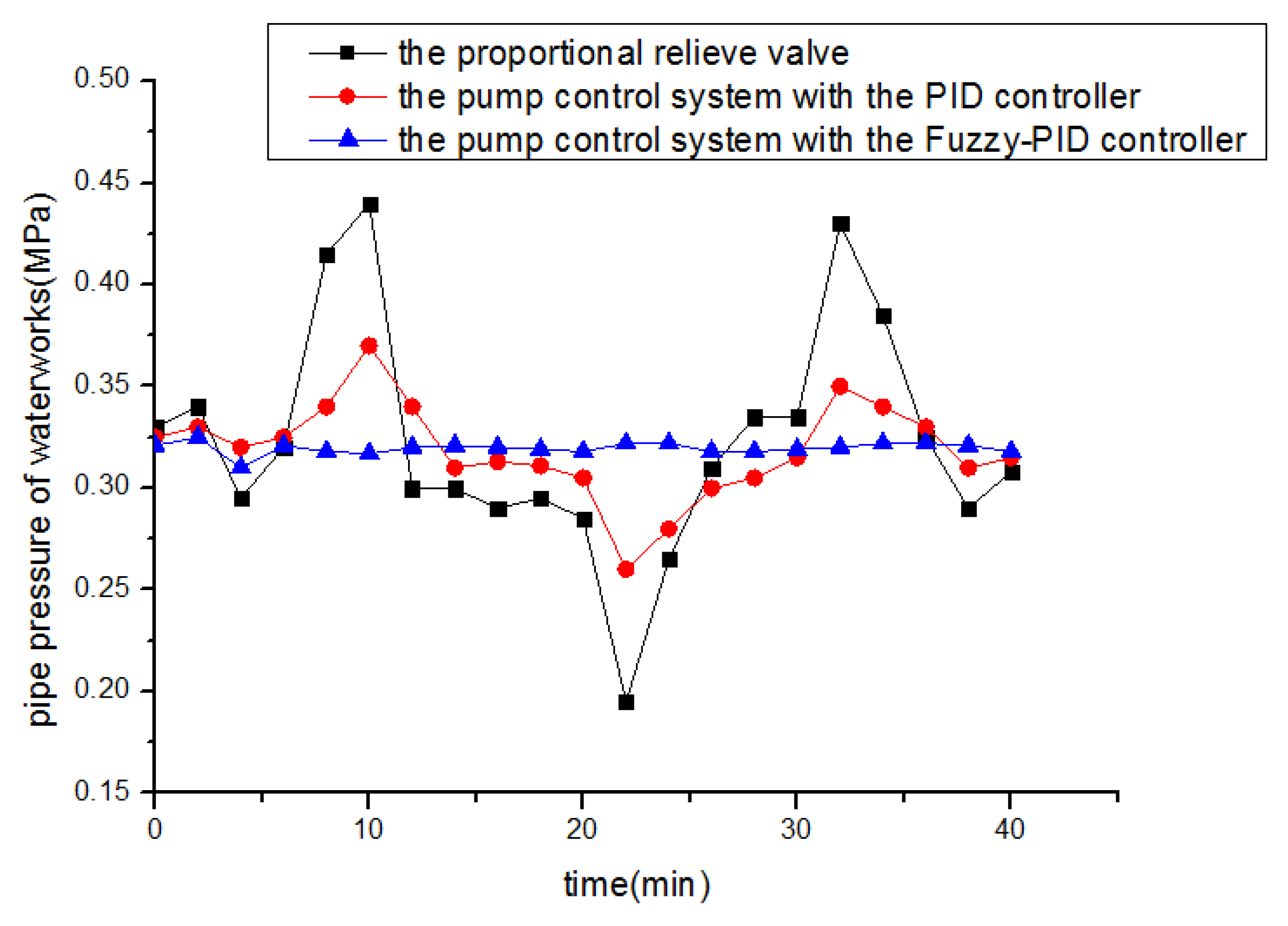
- In order to improve the performance of the new pump control system, a Fuzzy-PID controller was designed. The simulation results show that: compared with the conventional PID control, the Fuzzy-PID control method has a better tracking ability, a smaller overshoot, a shorter adjustment time and a stronger anti-interference ability. Therefore, the Fuzzy-PID control method is more suitable for HVC.
- (4)
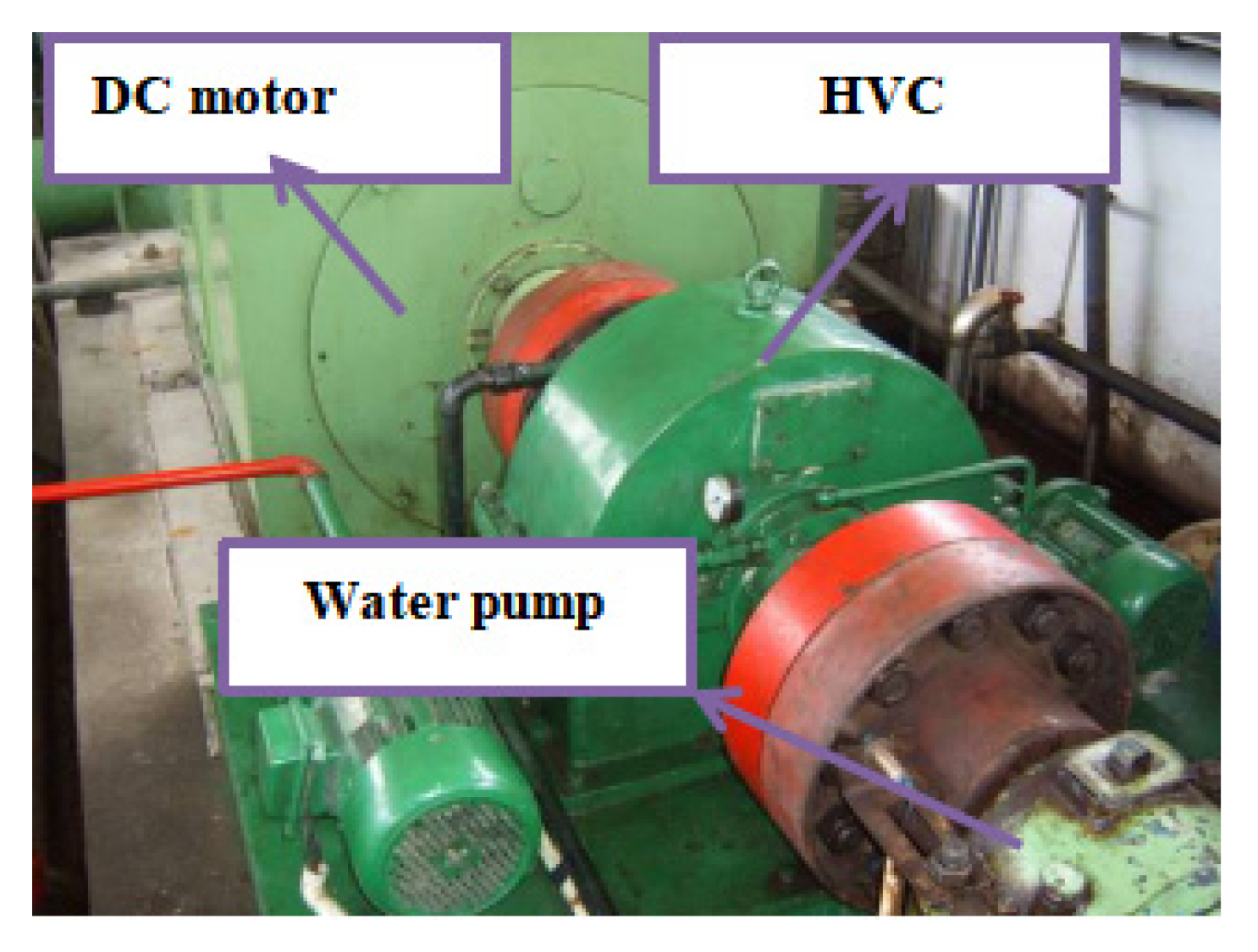
- To verify our theoretical analysis results, a relative industrial experiment was carried out and the tested data show that, by applying the pump control system of HVC based on the Fuzzy-PID controller, the speed fluctuation range of HVC is reduced to ±6π rad/min, the pressure fluctuation of distribution network is reduced to ±0.002 MPa, and the current consumed by DC motor decreased significantly from 28 to 11.9 A.
Author Contributions
Funding
Conflicts of Interest
References
- Meng, Q.R.; Hou, Y. Mechanism of hydro-viscous soft start of belt conveyor. J. China Univ. Min. Technol. 2008, 18, 459–465. [Google Scholar] [CrossRef]
- Hou, Y.F.; Xie, F.W. Control strategy of disc braking system for downward belt conveyor. Min. Sci. Technol. 2011, 21, 491–494. [Google Scholar] [CrossRef]
- Li, F.S. The Analysis of Several Typical Speed Control Systems for HVD. Shandong Inst. Electr. Power 2003, 1, 42–45. (In Chinese) [Google Scholar]
- Wei, C.G.; Zhao, J.X. Hydro-Viscous Transmission Technology; National Defence Industry Press: Beijing, China, 1996; pp. 47–50. [Google Scholar]
- Mikael, H. Optimizing the smoothness and temperatures of a wet clutch engagement through control of the normal force and drive torque ASME. J. Tribol. 2000, 122, 119–123. [Google Scholar]
- Huang, X.G.; Wei, C.G. Stability of oil Film and Out Put Speed of Hydroviscous Drive Affected by the Pressure of Control Oil. J. Beijing Inst. Technol. 2001, 10, 266–271. [Google Scholar]
- Wei, J.H.; Chen, N. Research on the soft start-up performance of hydro-viscous drive. J. Coal Sci. Eng. 2004, 10, 70–72. [Google Scholar]
- Ferreira, F.J.; Fong, J.A.; de Almeida, A.T. Eco-analysis of Variable Speed Drives for Flow Regulation in Pumping Systems. IEEE Trans. Ind. Electron. 2011, 58, 2117–2125. [Google Scholar] [CrossRef]
- Lamaddalena, N.; Khila, S. Energy saving with variable speed pumps in on-demand irrigation system. Irrig. Sci. 2012, 30, 157–166. [Google Scholar] [CrossRef]
- Mao, H.C.; Chung, C.C.; Chung, F.J. The high response and high efficiency velocity control of a hydraulic injection molding machine using a variable rotational speed electro-hydraulic pump-controlled system. Int. J. Adv. Manuf. Technol. 2009, 43, 841–851. [Google Scholar]
- Ding, H.G.; Zhao, J.Y. A New Method of Improving Low-Speed Performance of Variable Speed Hydraulic Systems: By Leaking Parallel Valve Control. Adv. Mech. Eng. 2014, 6, 1–10. [Google Scholar] [CrossRef]
- Zhao, J.Y.; Ding, H.G.; Han, G.Z.; Yang, H.F. A New method of Improving Comprehensive Performances of Variable Speed Pump Control Systems with Large power: Valve pump Parallel Variable Structure Control. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics, Harbin, China, 5–7 August 2015; pp. 187–193. [Google Scholar]
- Gong, G.; Wang, F.; Qin, Y.; Zhang, Y.; Sun, C.; Yang, H. The design of low cost valve-and-pump compounded pressure control system for the hydro viscous clutch. Mechatronics 2020, 65, 102310. [Google Scholar] [CrossRef]
- Qin, Y.; Gong, G.; Wang, F.; Sun, C. Research on pressure control strategy of hydraulic system of hydro-viscous variable speed clutch. J. Harbin Eng. Univ. 2020, 41, 1377–1383. [Google Scholar]
- Qin, Y.F.; Gong, G.G.; Wang, F.; Sun, C.C. Displacement controller design for piston of hydro-viscous clutch based on RBF neural network. Chin. J. Eng. Des. 2019, 26, 603–610. [Google Scholar]
- Qi, H.; Liu, S.; Yang, R.; Yu, Y. Research on new intelligent pump control based on sliding mode variable structure control. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 1239–1244. [Google Scholar]
- Jahmeerbacus, M.I. Flow Rate Regulation of a Variable Speed Driven Pumping System Using Fuzzy Logic. In Proceedings of the 4th International Conference on Electric Power and Energy Conversion Systems, Tokyo, Japan, 24–26 November 2015; pp. 1–6. [Google Scholar]
- Kastrevc, M.; Pusenjak, R. Fuzzy Pressure Control of Hydraulic System with Gear Pump Driven by Variable Speed Induction Electro-motor. Exp. Tech. 2005, 29, 57–62. [Google Scholar] [CrossRef]
- He, S.J.; Zhu, S.S.; Bai, Q. Fault’s analysis and improvement of hydro-viscous speed-regulation clutch used in constant pressure water supply. In Proceedings of the Fifth Session of the National Fluid Power Transmission and Control Conference and the 2008 Air Institute of Hydranlic and Pneumatic Conference of China, Beijing, China, 1 October 2008; pp. 66–70. [Google Scholar]
- Liao, X.P.; Gong, G.F.; Zhou, T.Y.; Wang, H. New design of the control system for hydro-viscous clutch. In Proceedings of the IEEE International Conference on Advances in Engineering and Technology Research, Unnao, India, 1–2 August 2015; pp. 1–4. [Google Scholar]
- Mao, H.C. A novel pitch control system for a wind turbine driven by a variable-speed pump-controlled hydraulic servo system. Mechatronics 2011, 21, 753–761. [Google Scholar]
- Ciotu, M.; Popescu, D.; Motocu, M. Analysis of Energy Efficiency by Replacing the Throttle Valve with Variable Speed Drive Condensate Pump from E.C. Turceni. In Proceedings of the 3rd International Symposium on Electrical and Electronics Engineering (ISEEE ‘10), Galați, Romania, 16–18 September 2010; IEEE: New York, NY, USA, 2010; pp. 293–297. [Google Scholar]
- Shen, H.K.; Jin, B.; Chen, Y. Study on energy-saving variable speed hydraulic control system. In Proceedings of the International Conference on Advanced Design and Manufacture, Harbin, China, 8–10 January 2006; pp. 806–811. [Google Scholar]
- Yuan, K.; Zhang, Y. The Application of VVVF in the Hydro viscous Dynamometer and Simulation Based on MATLAB. In Proceedings of the 3rd International Conference on Power Electronics and Intelligent Transportation System, Shenzhen, China, 13–14 November 2010; pp. 321–324. [Google Scholar]
- Malki, H.A.; Li, H.; Chen, G. New design and stability analysis of fuzzy proportional-derivative control systems. IEEE Trans. Fuzzy Syst. 1994, 2, 245–254. [Google Scholar] [CrossRef]
- Xie, F.W.; Hou, Y.F.; Xu, Z.P.; Zhao, R. Fuzzy-immune control strategy of a hydro-viscous soft start device of a belt conveyor. Min. Sci. Technol. 2009, 19, 544–548. [Google Scholar] [CrossRef]
- Meng, Q.R.; Hou, Y.F. Research of optimal fuzzy control of hydro-viscous drive soft starter of belt conveyor. China Min. Mag. 2007, 16, 63–65. [Google Scholar]
- Sun, C.C.; Gong, G.F.; Wang, F. Fuzzy control strategy for hydro-viscous clutch. In Proceedings of the 9th Fluid Power Transmission Control Conference of China (9th FPTC-2016), Hangzhou, China, 17–18 November 2016; pp. 883–887. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Rated power of HVD | 471 | KW |
| Rated torque of HVD | 6000 | N·m |
| Oil pressure | 0.2–2 | MPa |
| Rated power of DC motor | 355 | KW |
| Rated voltage of DC motor | 1000 | V |
| Flow of water pump | 2700 | m3/h |
| Lift of water pump | 39 | m |
| pressure of Pipe network | 0.29–0.34 | MPa |
| EC | NB | NM | NS | ZO | PS | PM | PB | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| E | ||||||||||||||||||||||
| NB | PB | NB | PS | PB | NB | NS | PM | NM | NB | PM | NM | NB | PS | NS | NB | ZO | ZO | NM | ZO | ZO | PS | |
| NM | PB | NB | PS | PB | NB | NS | PM | NM | NB | PS | NS | NM | PS | NS | NM | ZO | ZO | NS | NS | ZO | ZO | |
| NS | PM | NB | ZO | PM | NM | NS | PM | NS | NM | PS | NS | NM | ZO | ZO | NS | NS | PS | NS | NS | PS | ZO | |
| ZO | PM | NM | ZO | PM | NM | NS | PS | NS | NS | ZO | ZO | NS | NS | PS | NS | NM | PM | NS | NM | PM | ZO | |
| PS | PS | NM | ZO | PS | NS | ZO | ZO | ZO | ZO | NS | PS | ZO | NS | PS | ZO | NM | PM | ZO | NM | PB | ZO | |
| PM | PS | ZO | PB | ZO | ZO | NS | NS | PS | PS | NM | PS | PS | NM | PM | PS | NM | PB | PS | NB | PB | PB | |
| PB | ZO | ZO | PB | ZO | ZO | PM | NM | PS | PM | NM | PM | PM | NM | PM | PS | NB | PB | PS | NB | PB | PB | |
| Time | Frequency/Hz | Target Pressure/MPa | Rotational Speed of Water Pump/r/min | Current of DC Motor/A |
|---|---|---|---|---|
| 24:0–6 | 19 | 0.29 | 609–610 | 11.9 |
| 6–8:30 | 14 | 0.34 | 743–741 | 28 |
| 8:30–13 | 15 | 0.33 | 716–714 | 24 |
| 13–17:30 | 16 | 0.32 | 689–691 | 21 |
| 17:30–22 | 17 | 0.31 | 658–657 | 17.8 |
| 22–24:0 | 18 | 0.30 | 634–631 | 14.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, X.; Yang, S.; Hu, D.; Gong, G.; Peng, X. Control Performance Improvement of Hydro-Viscous Clutch Based on Fuzzy-PID Controller. Energies 2021, 14, 8282. https://doi.org/10.3390/en14248282
Liao X, Yang S, Hu D, Gong G, Peng X. Control Performance Improvement of Hydro-Viscous Clutch Based on Fuzzy-PID Controller. Energies. 2021; 14(24):8282. https://doi.org/10.3390/en14248282
Chicago/Turabian StyleLiao, Xiangping, Shuai Yang, Dong Hu, Guofang Gong, and Xiongbin Peng. 2021. "Control Performance Improvement of Hydro-Viscous Clutch Based on Fuzzy-PID Controller" Energies 14, no. 24: 8282. https://doi.org/10.3390/en14248282
APA StyleLiao, X., Yang, S., Hu, D., Gong, G., & Peng, X. (2021). Control Performance Improvement of Hydro-Viscous Clutch Based on Fuzzy-PID Controller. Energies, 14(24), 8282. https://doi.org/10.3390/en14248282