
Analysis of Control Strategies Based on Virtual Inertia for the Improvement of Frequency Stability in an Islanded Grid with Wind Generators and Battery Energy Storage Systems




Abstract
:1. Introduction
2. Methodology
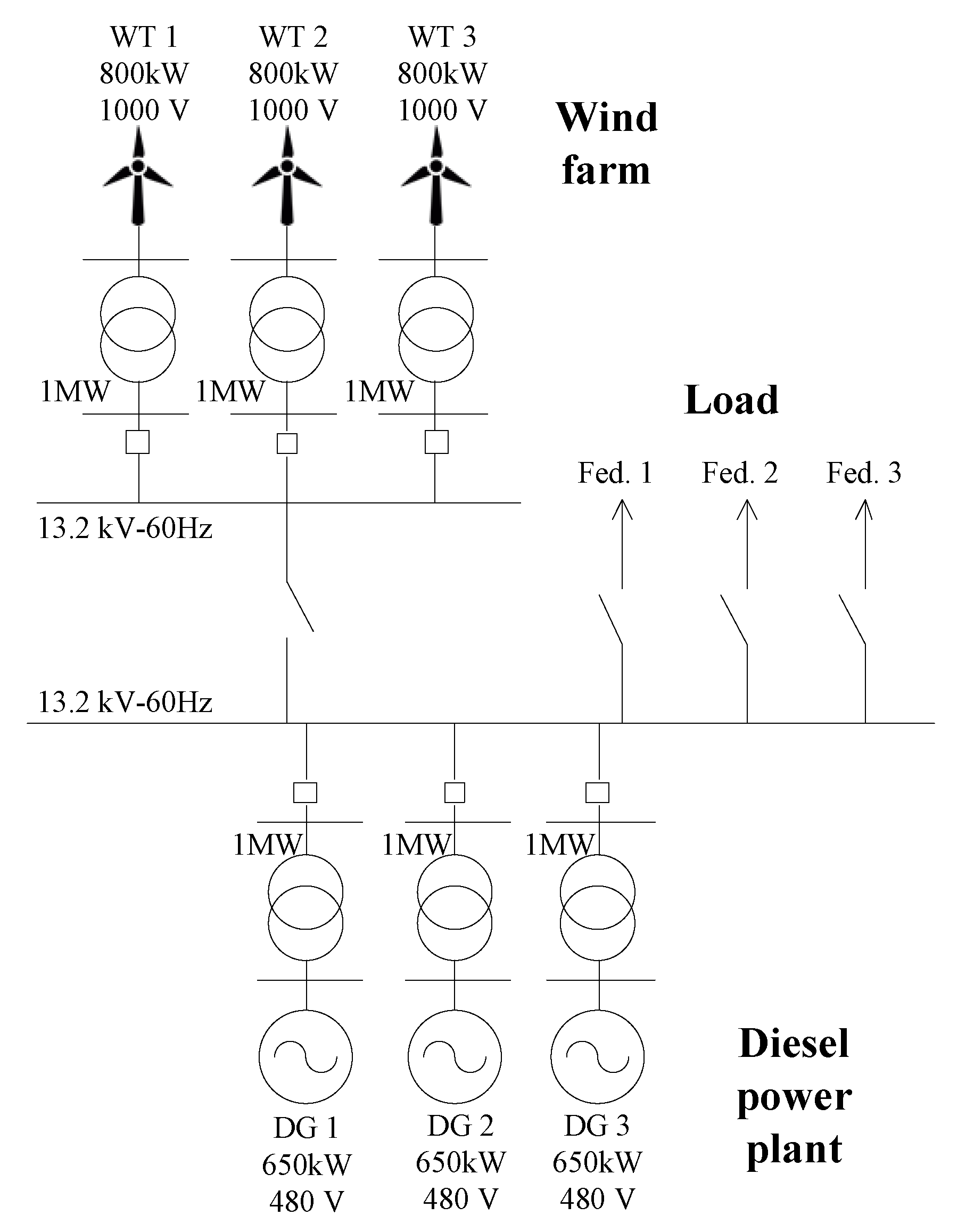
2.1. System Description
2.2. System Modeling
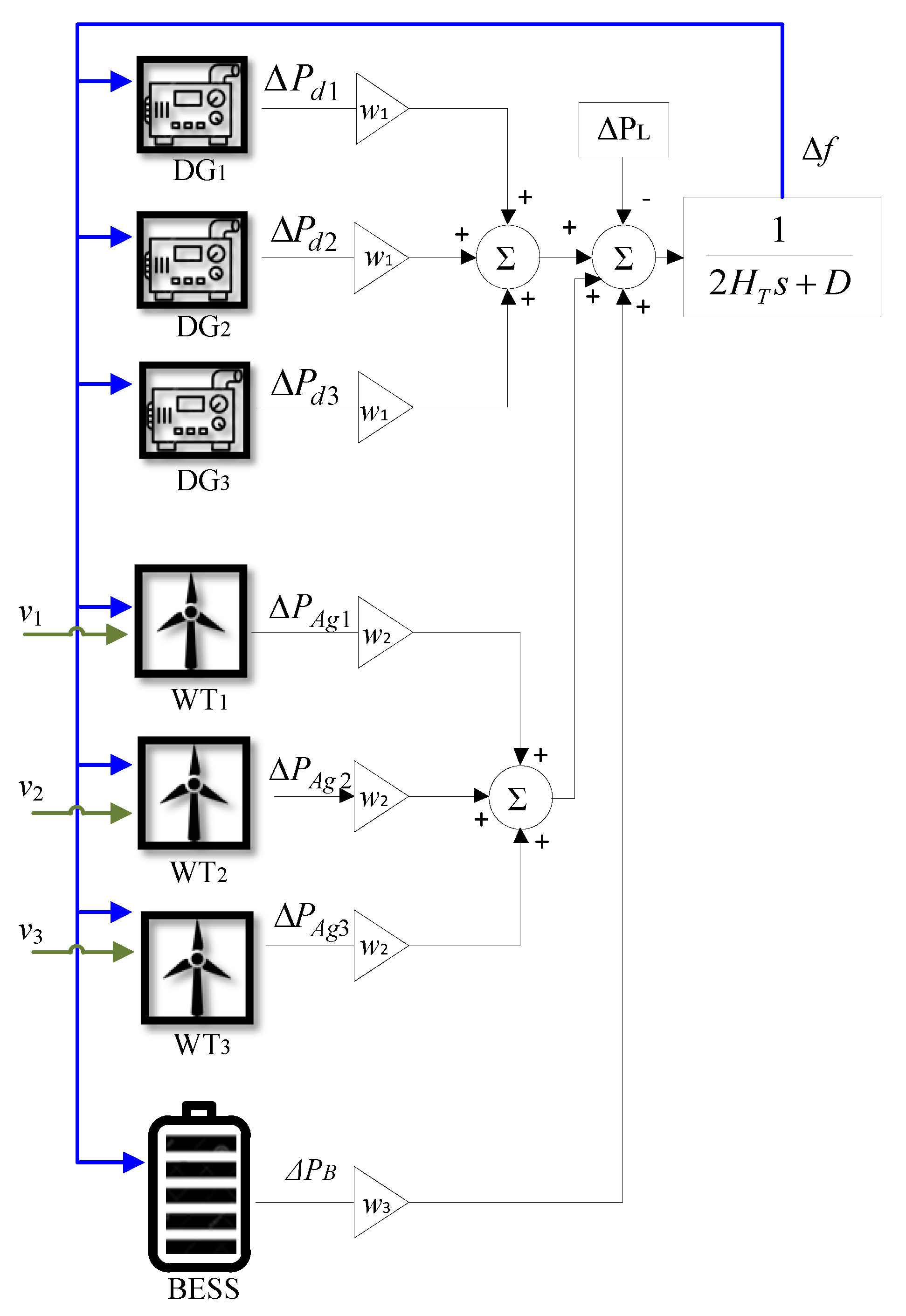
- ΔPL is the deviation in the value of the load that the system experiences in per unit. It will be negative if the charge decreases and positive when the opposite happens.
- ΔPdn represents the power compensation contribution generated by each diesel generator to contribute to the recovery of the system frequency.
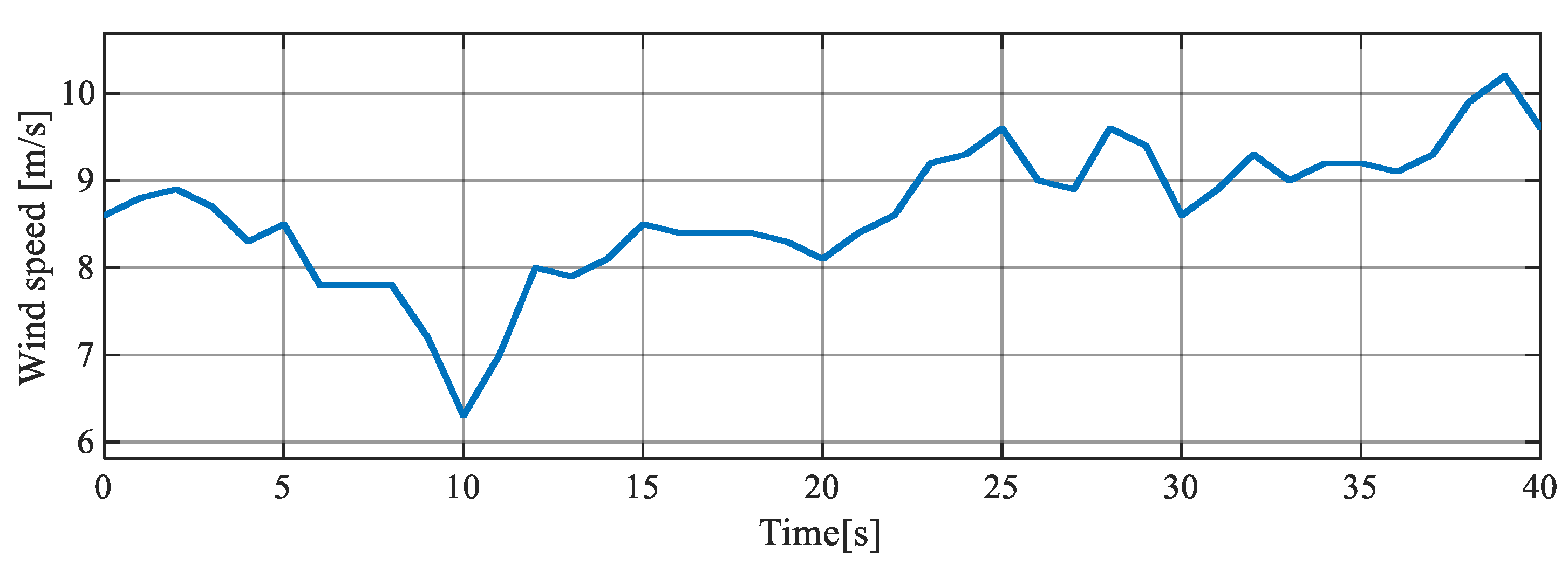
- vn represents the incident wind speed at each wind turbine.
- wi is the participation factor of each generation unit, both in the frequency support of the system and in the coverage of demand. In per unit values, this factor is defined as the relationship between the installed capacity of each generation unit and the base power considered for the analysis. For example, in this study the installed power of diesel power plants has been taken (Sbase = 3 × 0.813 MVA = 2.439 MVA), with which the participation factors are: w1 = 0.813/2.439 = 1/3 [pu], w2 = 0.8/2.439 = 0.328 [pu].
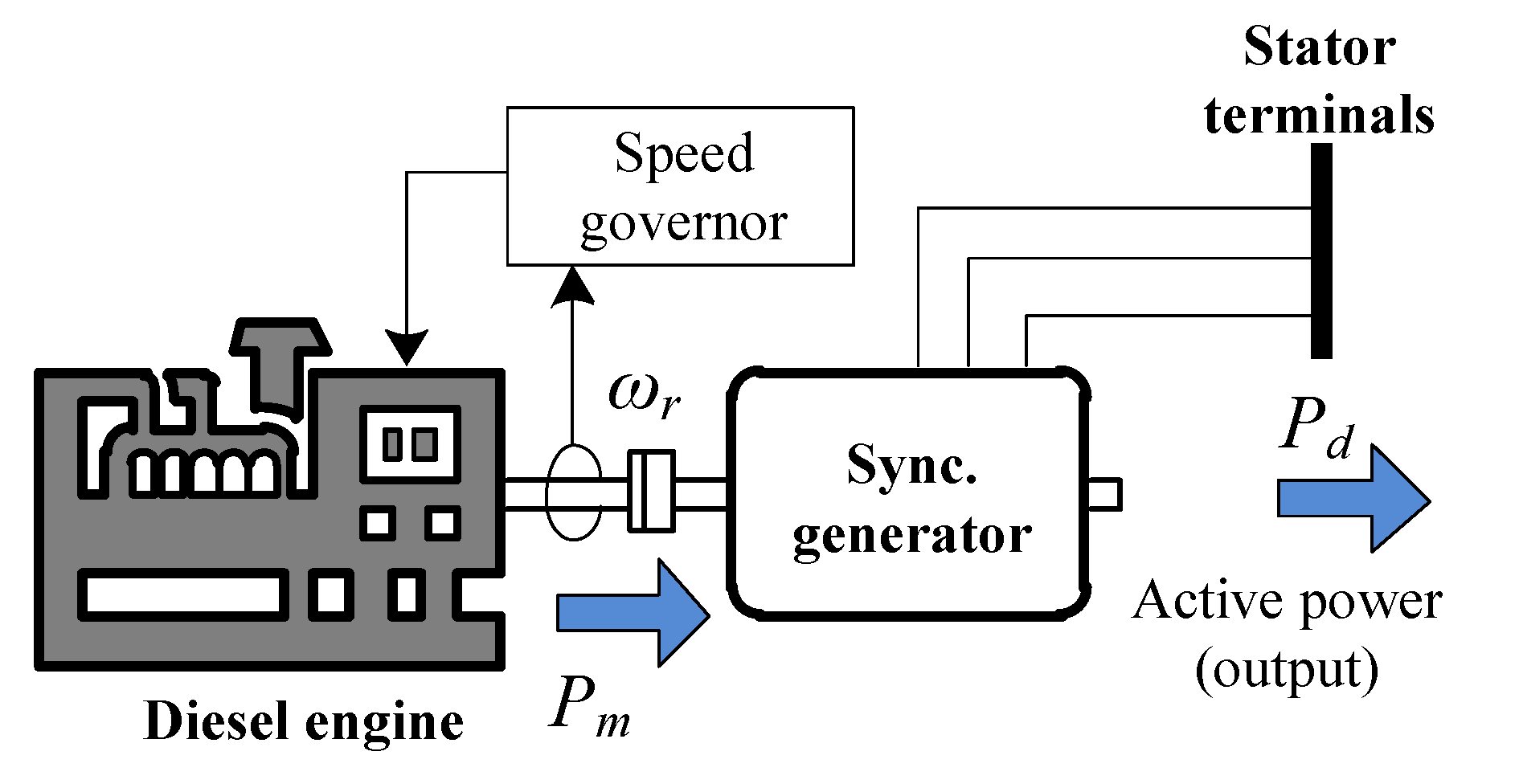
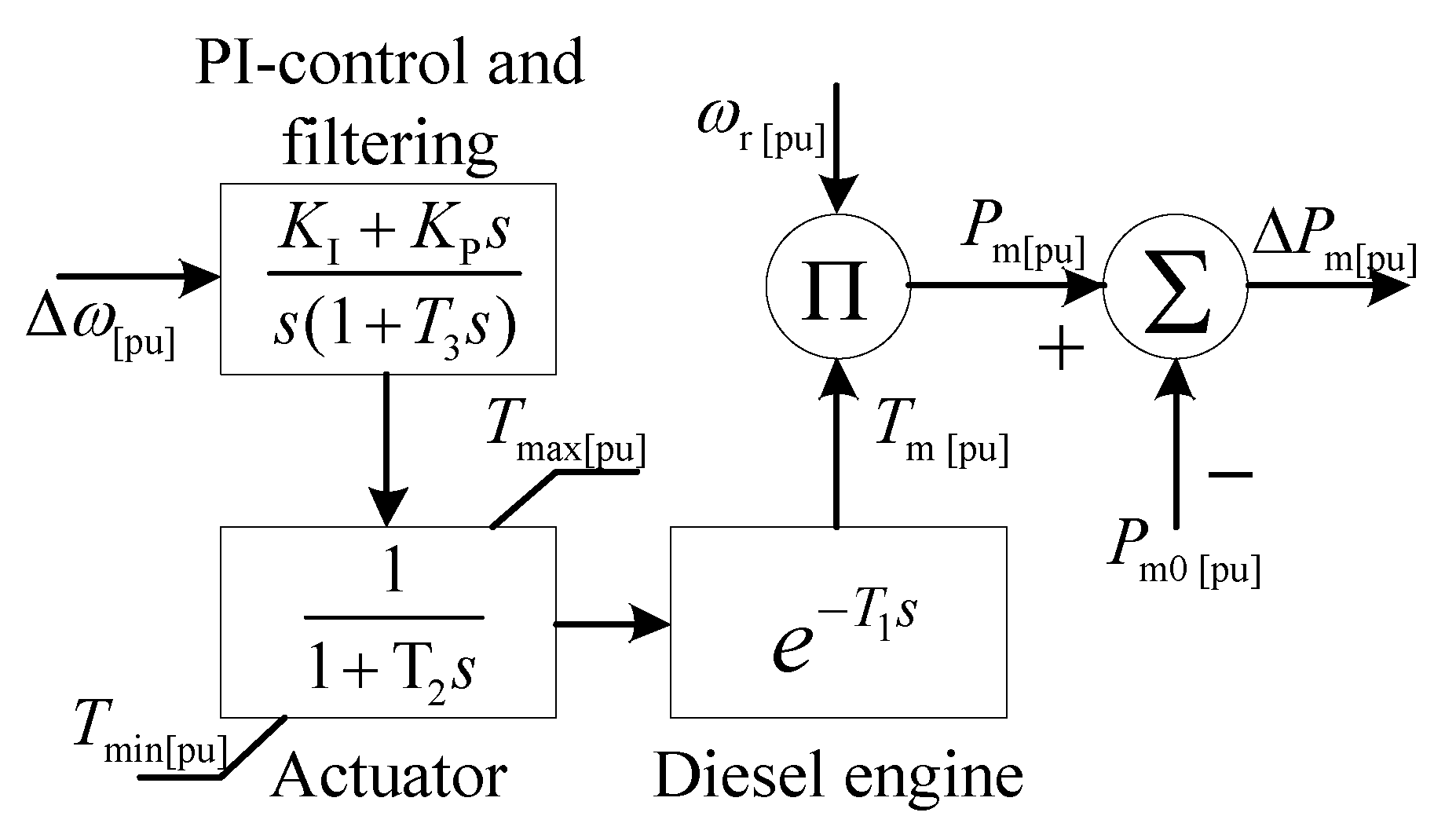
2.2.1. Diesel Power Plant
- ωr is the angular velocity of the generator.
- Tmax and Tmin are the mechanical torque limits, Tm, that are input to the actuator.
- ΔPm represents the deviation of the mechanical power compared to a pre-established initial value, Pm0.
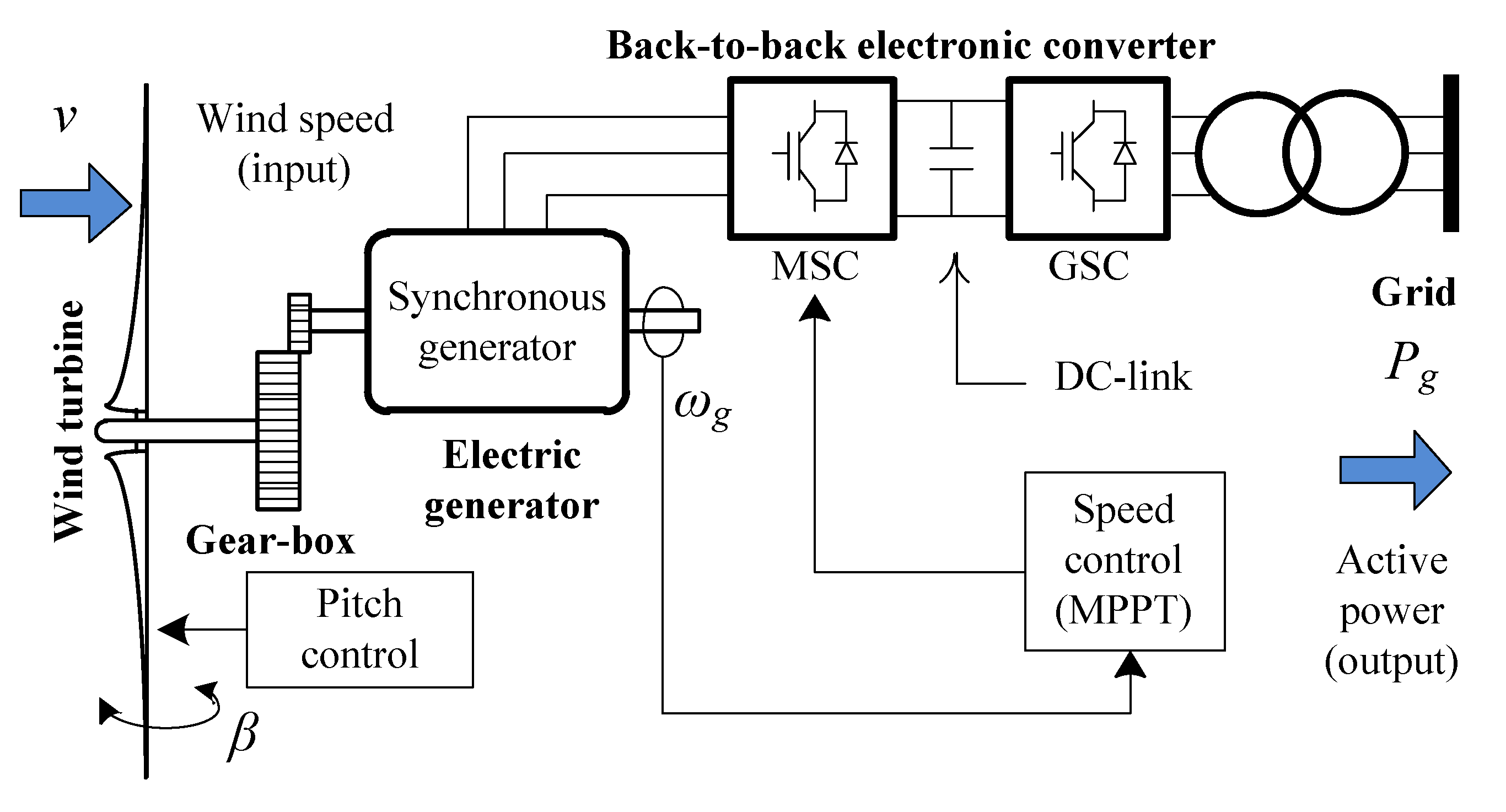
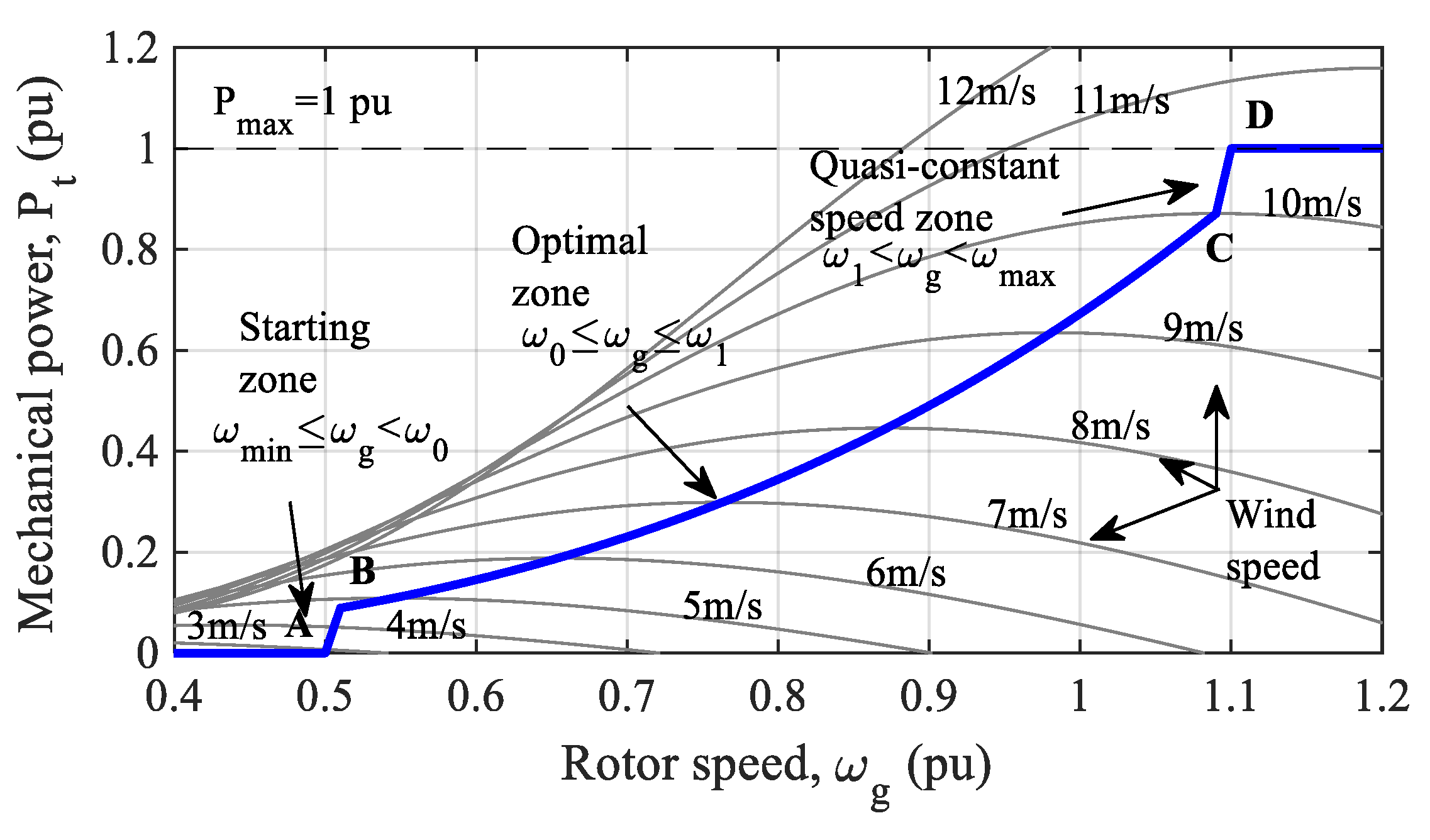
2.2.2. Wind Power Plant
- Popt = Optimum power delivered by the wind turbine.
- ρ = Air density (kg/m3).
- R = Turbine blade radius (m).
- Cp,max = Maximum power coefficient.
- λopt = Optimal specific or relative turbine speed.
- v = wind speed.
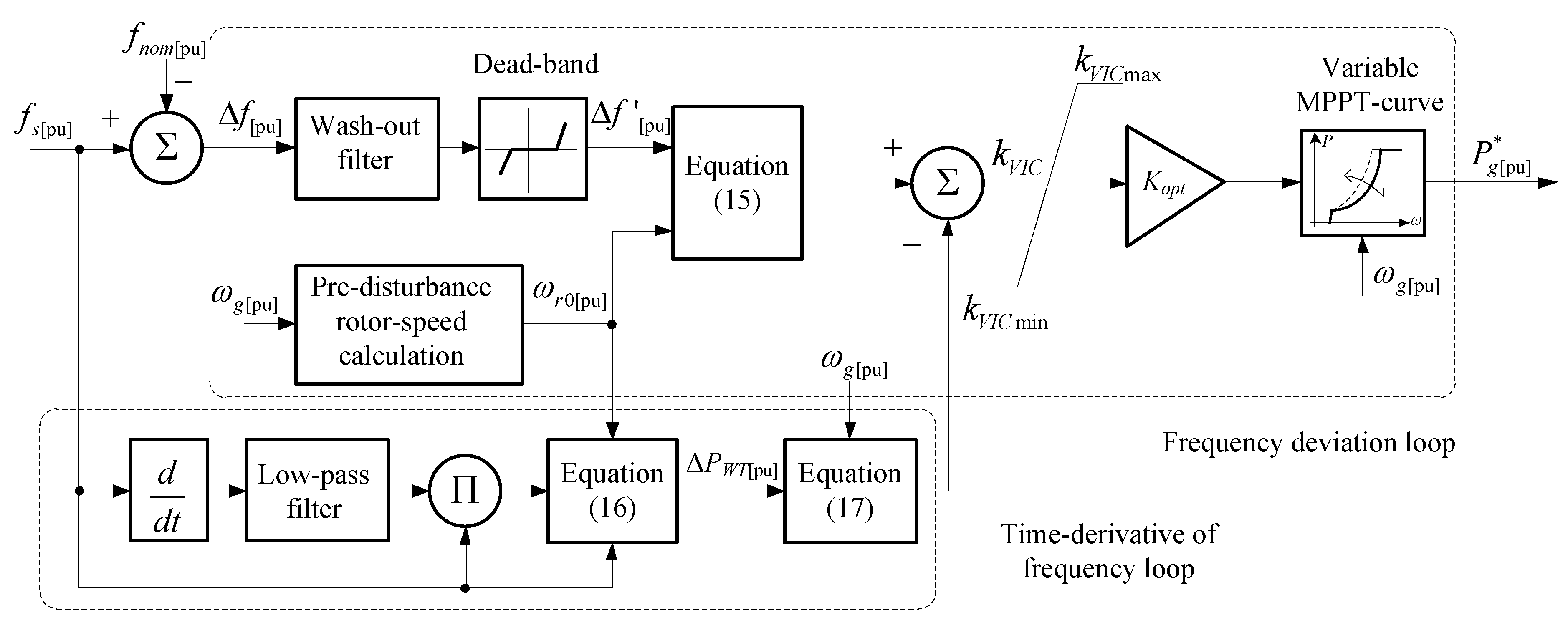
- = initial angular velocity of the rotor.
- = virtual inertia coefficient.
- = power delivered by the wind turbine due to the change in rotor speed, which can be defined as:
- WVIR = weighting factor, defined as the ratio of the kinetic energy developed by the wind turbine to the maximum kinetic energy that it can store, as follows:
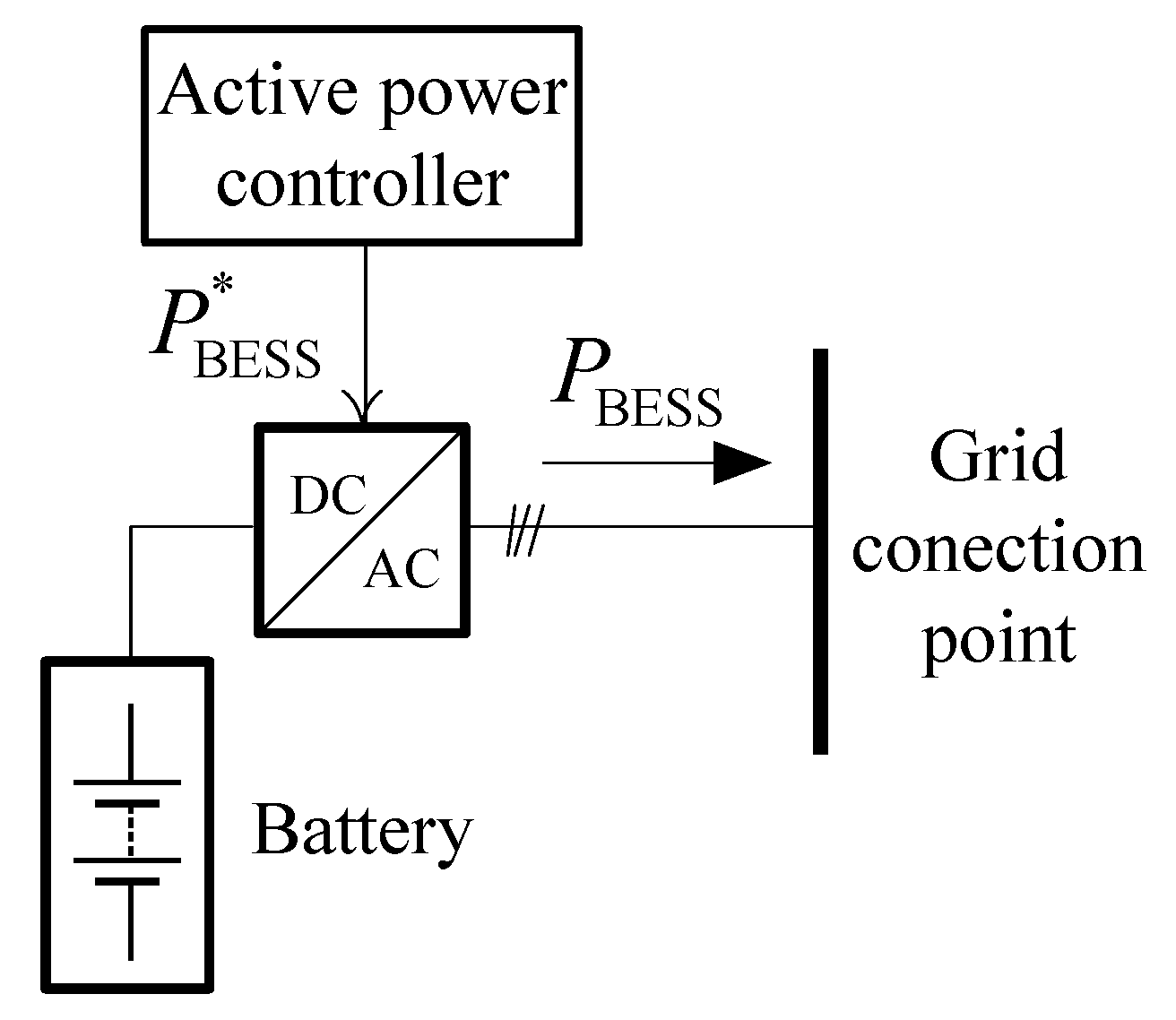
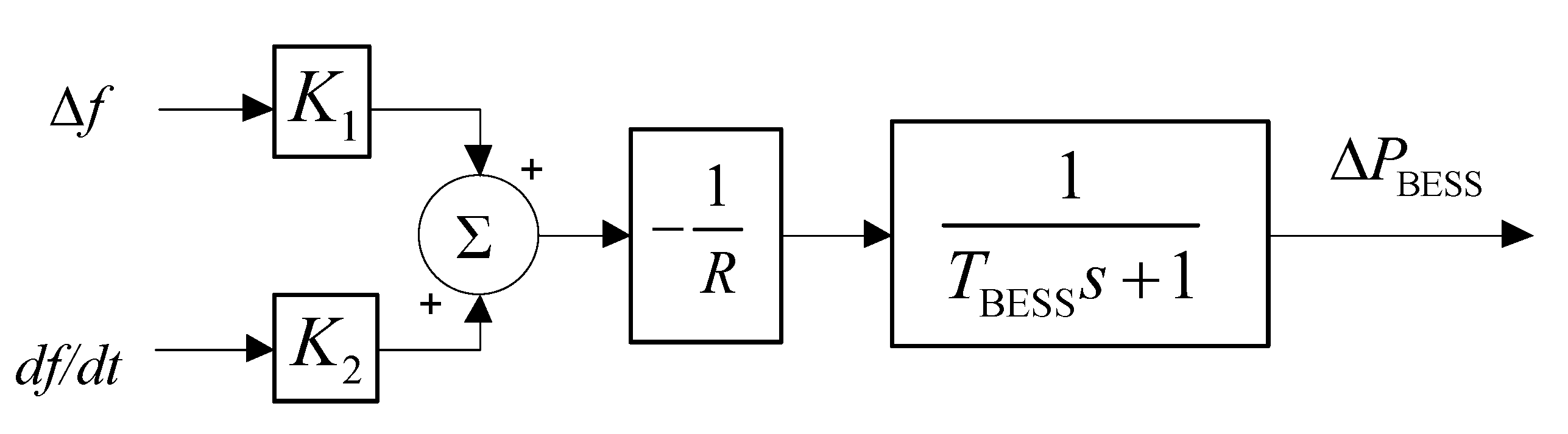
2.2.3. Battery Energy Storage System
3. Results and Discussion
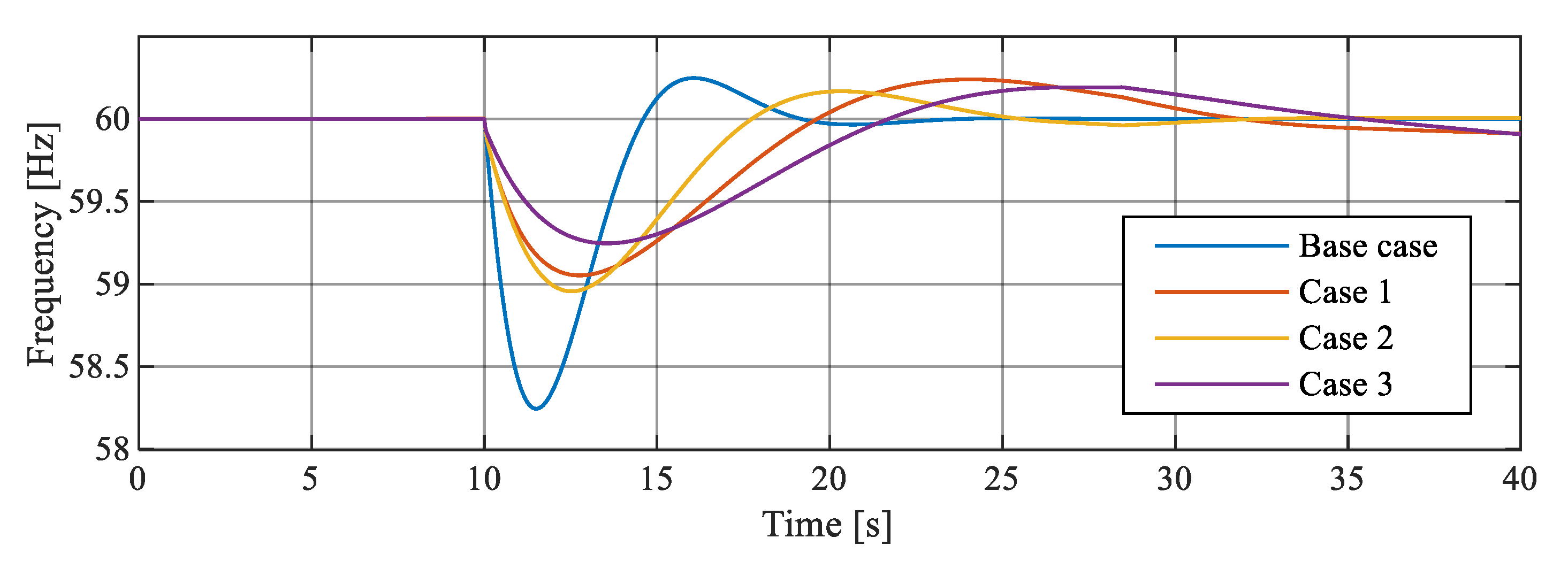
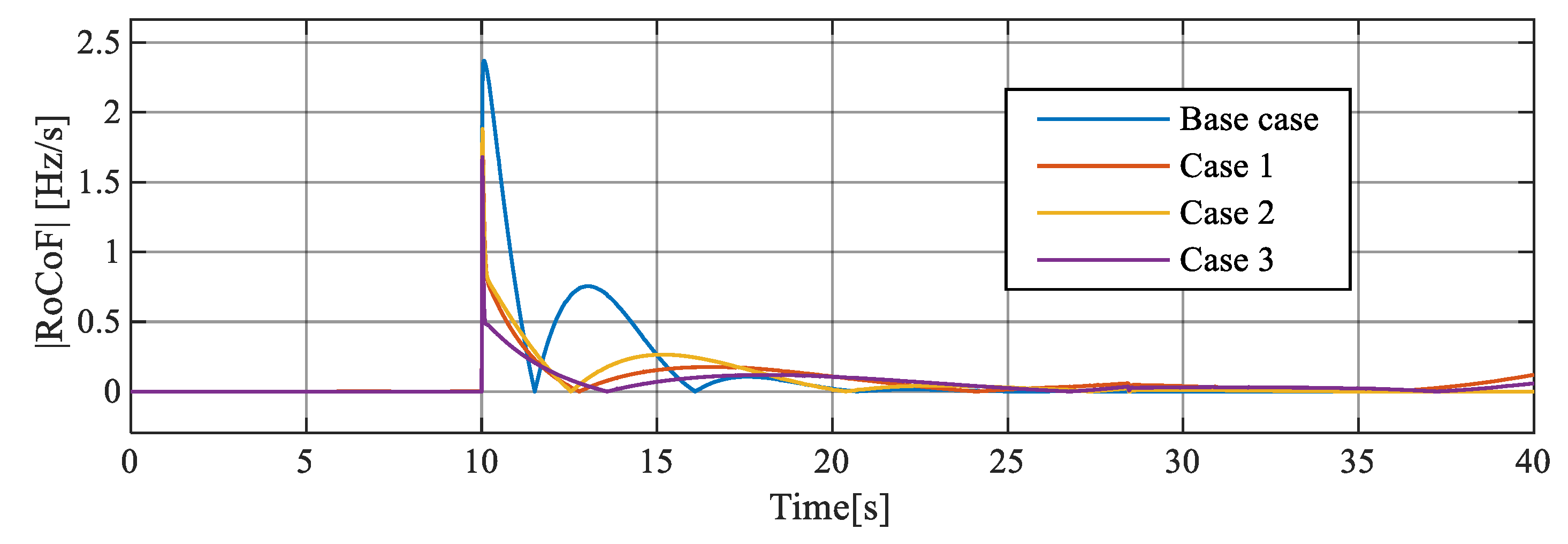
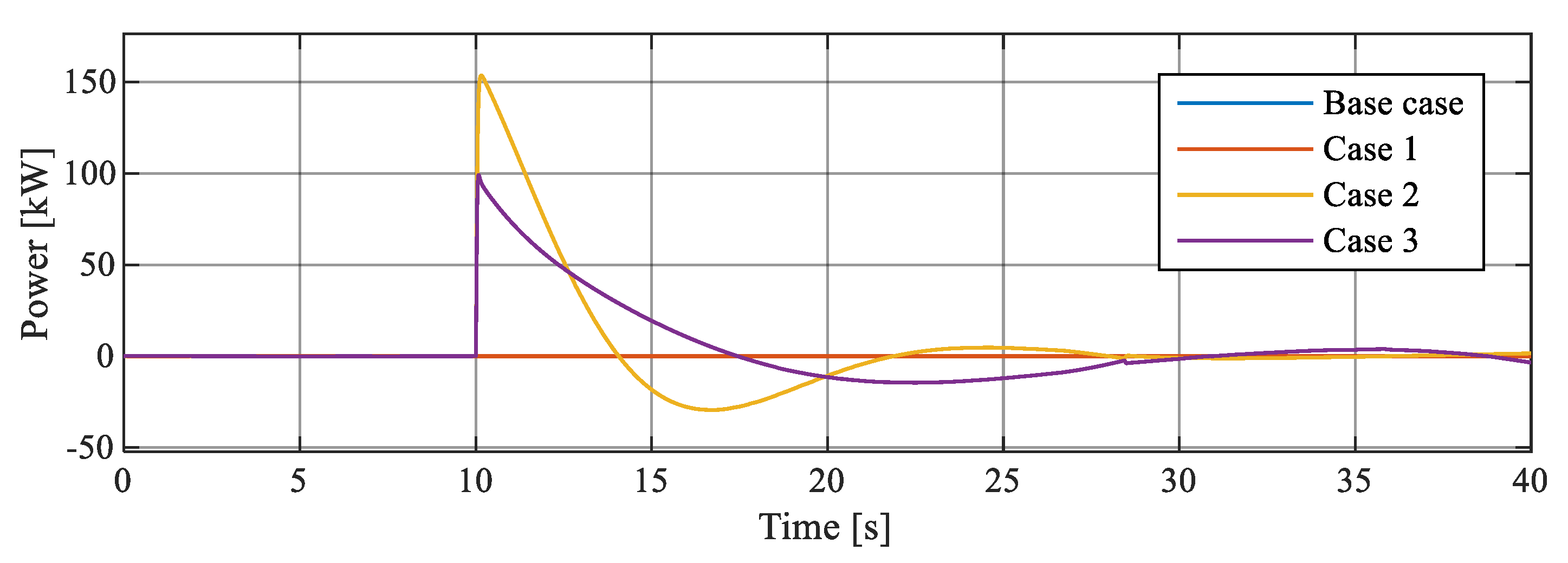
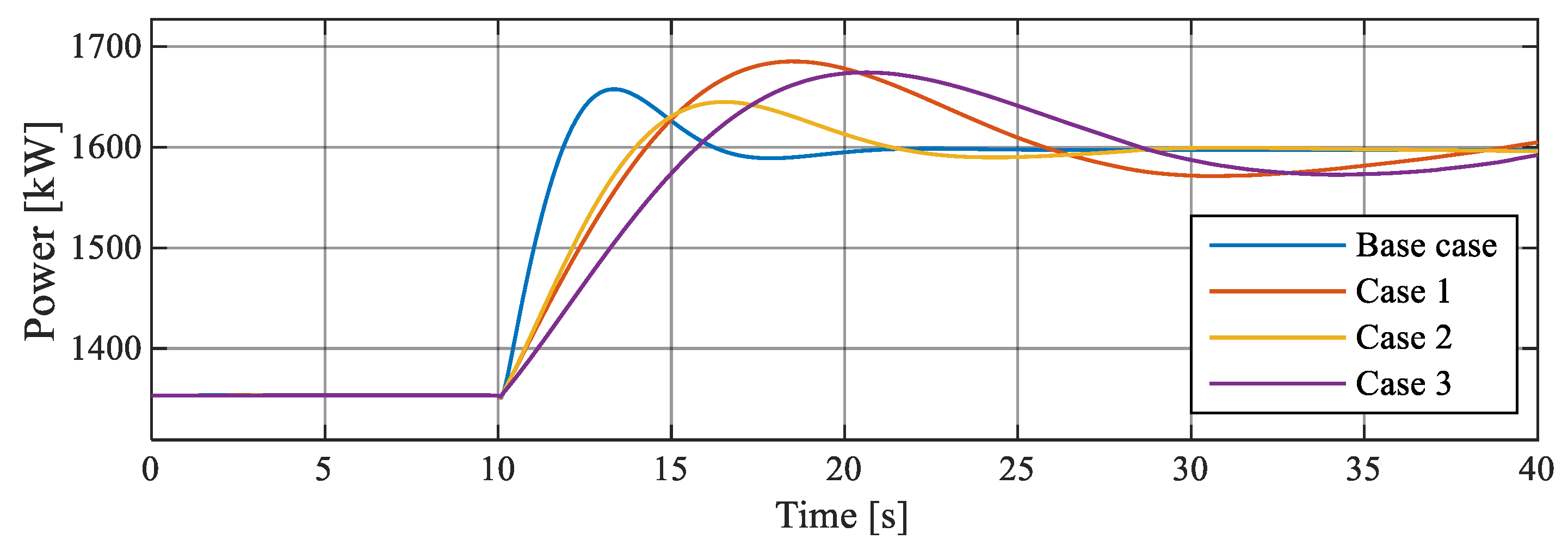
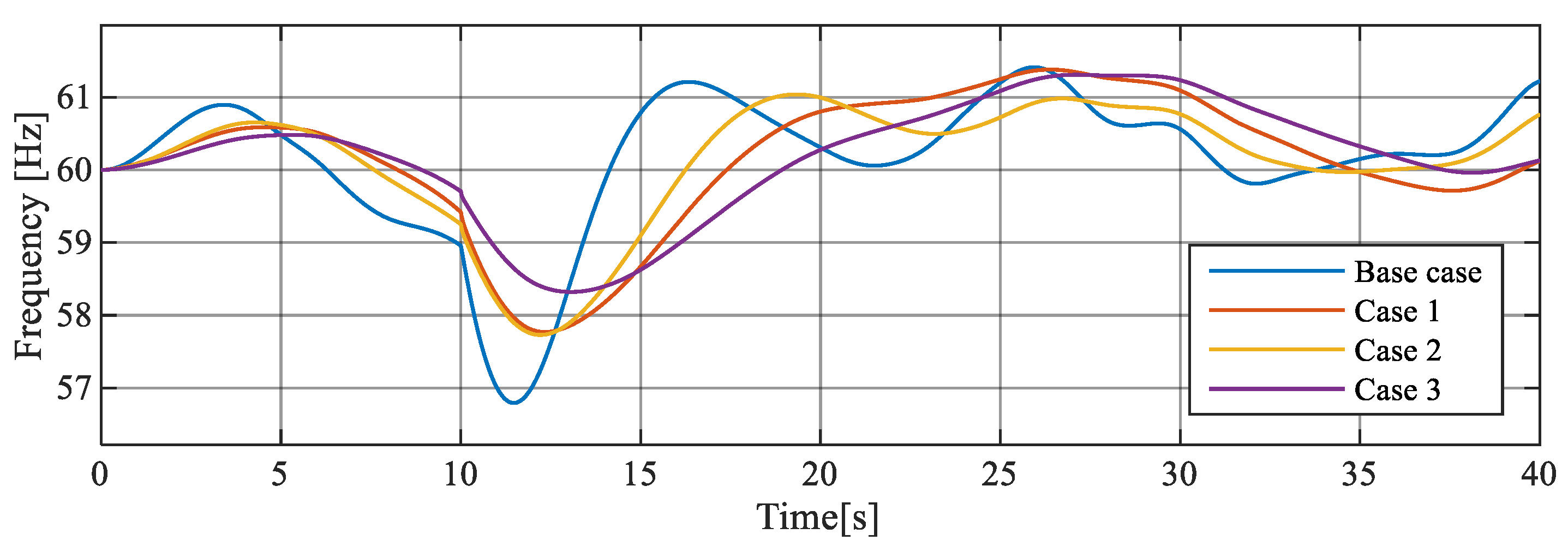
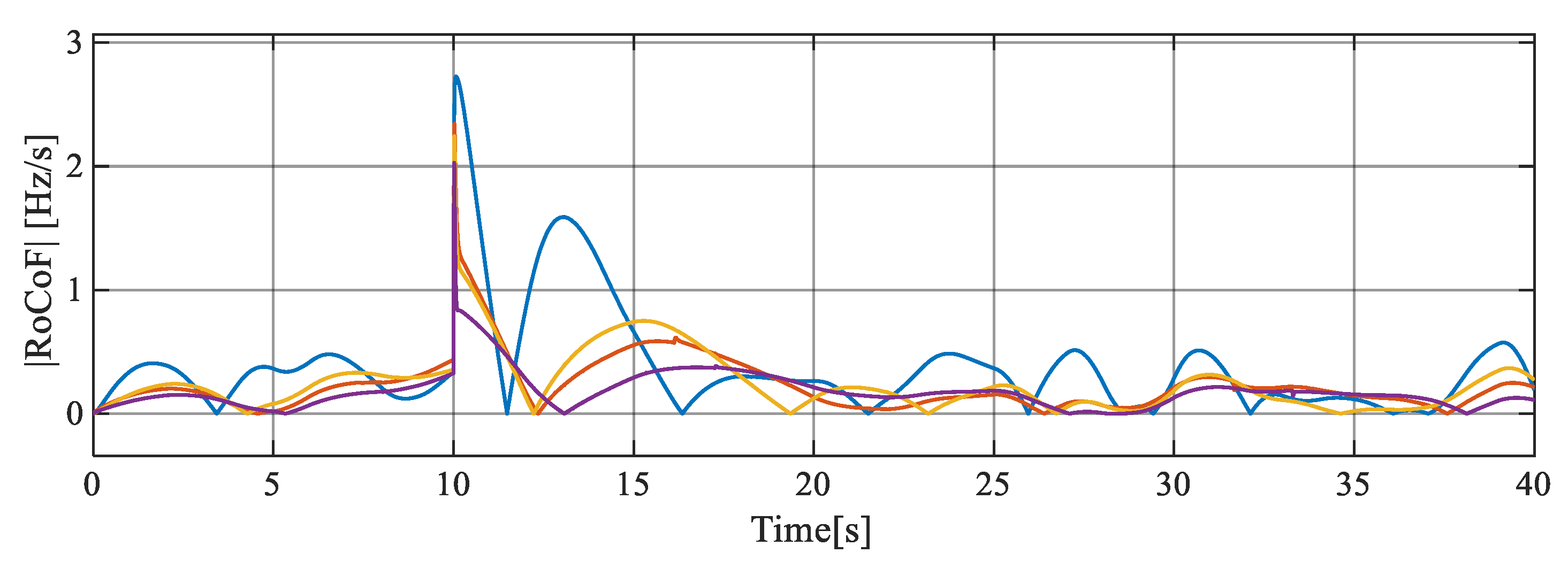
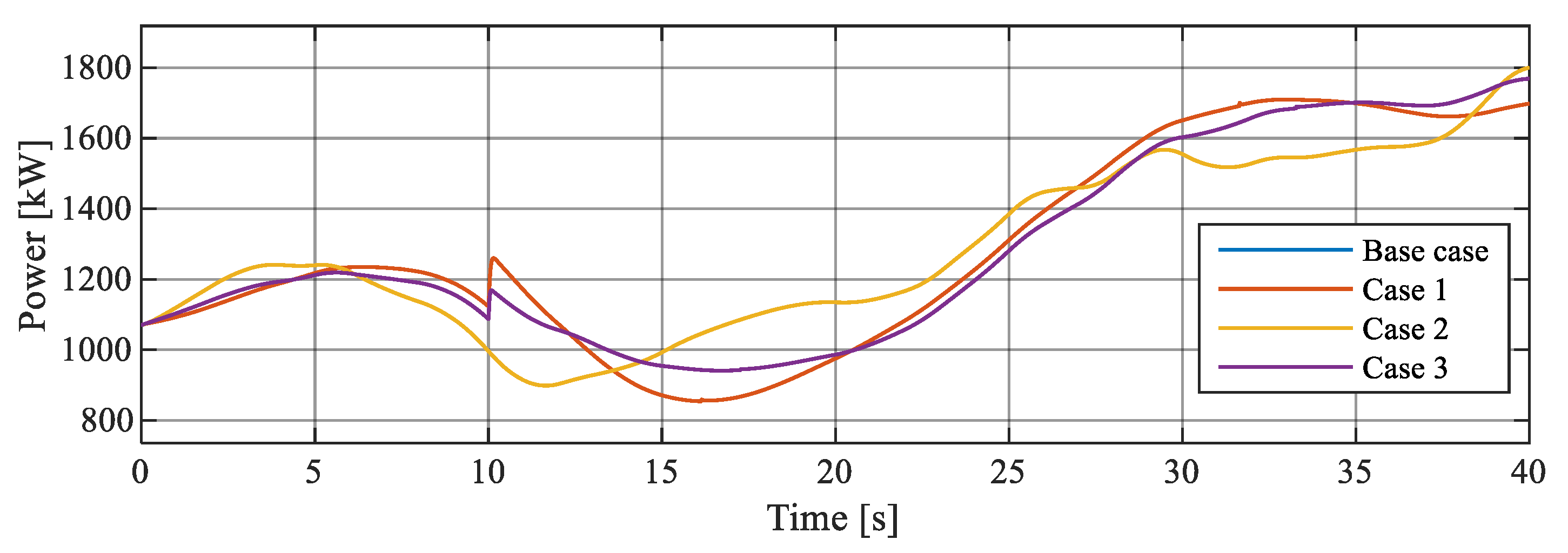
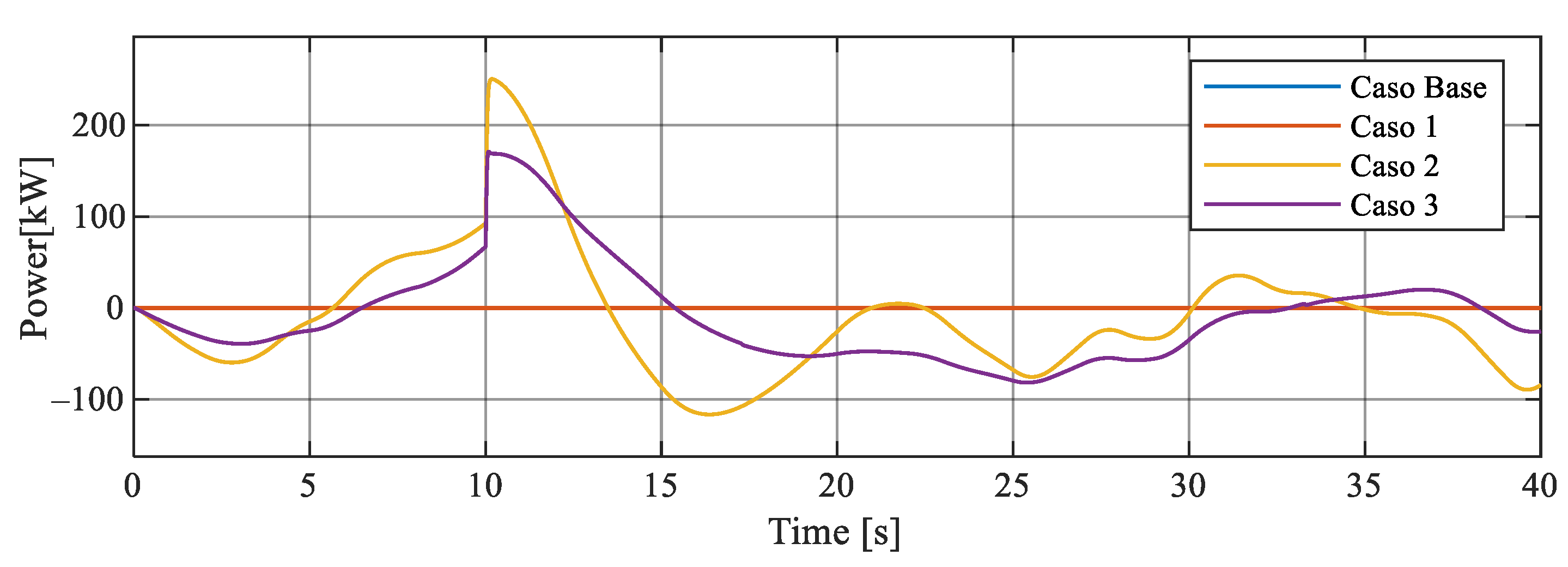
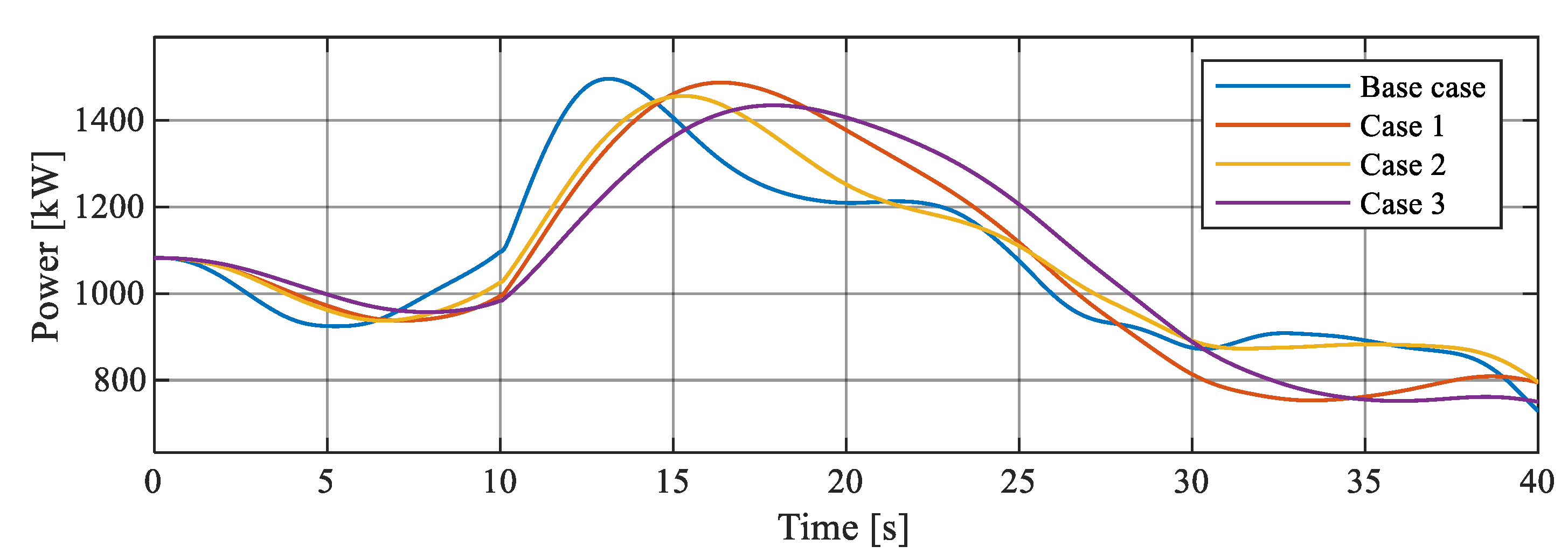
- Base case: Frequency control performed only by operating diesel synchronous generation.
- Case 1: Frequency control performed by the diesel generation in cooperation with the virtual inertia control implemented in the wind turbines.
- Case 2: Frequency control carried out by the diesel generation together with the BESS using the emulated inertia control.
- Case 3: Frequency control carried out by the diesel generation together with the combined action of the wind turbines and the BESS in the provision of inertial response.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value and Unit |
|---|---|
| Rated active power | 650 kW |
| Rated apparent power | 813 kVA |
| Frequency | 60 Hz |
| Number of poles | 6 |
| Synchronous speed | 1200 rpm |
| Motor-generator inertia constant (3 × 813 kVA base) | 0.4208 s |
Appendix B
Appendix C
| Parameter | Symbol | Value and Units |
|---|---|---|
| Rated power (base power) | PAG,base | 800 kW |
| Maximum/minimum generator power | Pg,max/Pg,min | 1 pu/0.04 p.u. |
| Maximum/minimum electromagnetic torque | Tem.max/Tem.min | 0.91 pu/0.08 p.u. |
| Wind speed at Pg = 0.8712 p.u. | v | 10 m/s |
| Air density | ρ | 1.225 kg/m3 |
| Turbine effective radius | R | 29.5 m |
| Maximum pitch angle rate | (dβ/dt) max | 10°/s |
| Turbine-generator inertia constant | HAG | 4.18 s |
| Generator and converter time constant: | τC | 20 ms |
| Blade pitch servo time constant | τP | 0.3 s |
| Pitch controller gains | KPpc/KIpc | 150/25 |
| Speed controller gains | KPsc/KIsc | 3/80 |
Appendix D
References
- Liu, C.; Cai, G. Power-oscillation evaluation in power systems with high penetration of renewable power generation based on network virtual inertia. IET Renew. Power Gener. 2019, 13, 138–145. [Google Scholar] [CrossRef]
- IEA International Energy Agency Renewable Power Report. Available online: https://www.iea.org/reports/renewable-power (accessed on 13 January 2021).
- Fernández-Guillamón, A.; Martínez-Lucas, G.; Molina-García, Á.; Sarasua, J.I. Hybrid Wind-PV frequency control strategy under variable weather conditions in isolated power systems. Sustainability 2020, 12, 7750. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control, 2nd ed.; EPRI, Ed.; McGraw-Hill: New York, NY, USA, 1994; ISBN 0-07-035958-X. [Google Scholar]
- Blackstone, B.; Hicks, C.; Gonzalez, O.; Baghzouz, Y. Improved islanded operation of a diesel generator—PV microgrid with advanced inverter. IEEE Int. Symp. Ind. Electron. 2017, 4026, 123–127. [Google Scholar] [CrossRef]
- Nastasi, B.; Mazzoni, S.; Groppi, D.; Romagnoli, A.; Astiaso Garcia, D. Solar power-to-gas application to an island energy system. Renew. Energy 2021, 164, 1005–1016. [Google Scholar] [CrossRef]
- Martínez-Lucas, G.; Sarasúa, J.I.; Pérez-Díaz, J.I.; Martínez, S.; Ochoa, D. Analysis of the implementation of the primary and/or inertial frequency control in variable speed wind turbines in an isolated power system with high renewable penetration. Case study: El hierro power system. Electronics 2020, 9, 901. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.; Hansen, T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Dawei, Z.; Minhui, Q.; Ma, J.; Dajun, J.; Maosheng, D.; Xiang, L. A Decentralized frequency regulation strategy of PV Power Plant based on droop control. China Int. Conf. Electr. Distrib. 2018, 1824–1828. [Google Scholar] [CrossRef]
- Yang, M.; Wang, C.; Hu, Y.; Liu, Z.; Yan, C.; He, S. Load Frequency Control of Photovoltaic Generation-Integrated Multi-Area Interconnected Power Systems Based on Double Equivalent-Input-Disturbance Controllers. Energies 2020, 13, 6103. [Google Scholar] [CrossRef]
- Wang, X.; Xie, Z.; Chang, Y. Control of PMSG-Based Wind Turbine with Virtual Inertia. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; pp. 1302–1306. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Frequency dependent strategy for mitigating wind power fluctuations of a doubly-fed induction generator wind turbine based on virtual inertia control and blade pitch angle regulation. Renew. Energy 2018, 128, 108–124. [Google Scholar] [CrossRef]
- Kumar, A.V.P.; Parimi, A.M.; Rao, K.U. A comparative analysis of Load Frequency Control Strategy of a Voltage Source Inverter for a stand-alone PV-Wind hybrid system. In Proceedings of the 2016 IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 4–6 March 2016. [Google Scholar] [CrossRef]
- Alhejaj, S.M.; Gonzalez-Longatt, F.M. Impact of inertia emulation control of grid-scale BESS on power system frequency response. In Proceedings of the 2016 International Conference for Students on Applied Engineering (ICSAE), Newcastle upon Tyne, UK, 20–21 October 2016. [Google Scholar] [CrossRef] [Green Version]
- Zecchino, A.; Yuan, Z.; Sossan, F.; Cherkaoui, R.; Paolone, M. Optimal provision of concurrent primary frequency and local voltage control from a BESS considering variable capability curves: Modelling and experimental assessment. Electr. Power Syst. Res. 2021, 190, 106643. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-García, Á. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef] [Green Version]
- Yap, K.Y.; Sarimuthu, C.R.; Lim, J.M.Y. Virtual inertia-based inverters for mitigating frequency instability in grid-connected renewable energy system: A Review. Appl. Sci. 2019, 9, 5300. [Google Scholar] [CrossRef] [Green Version]
- Pourbeik, P.; Petter, J.K. Modeling and validation of battery energy storage systems using simple generic models for power system stability studies. Cigre Sci. Eng. 2017, 9, 63–72. [Google Scholar]
- Mongird, K.; Viswanathan, V.; Balducci, P.; Alam, J.; Fotedar, V.; Koritarov, V.; Hadjerioua, B. Energy Storage Technology and Cost Characterization Report. Dep. Energy 2019. [Google Scholar] [CrossRef]
- Efthymiou, V.; Yianni, C.; Georghiou, G. Economic viability of battery energy storage for the provision of frequency regulation service. J. Power Technol. 2018, 98, 403. [Google Scholar]
- Ochoa, D.; Martinez, S. Fast-Frequency Response Provided by DFIG-Wind Turbines and its Impact on the Grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Jin, X.; Xie, Z.; Zhang, X.; Niu, L.; Gao, X. A Control Strategy for DFIG-Based Wind Turbines Based on the Fulfilment of Virtual Inertia. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Krishan, O.; Sathans. Frequency regulation in a standalone wind-diesel hybrid power system using pitch-angle controller. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; Volume 2016, pp. 1148–1152.
- Siniscalchi-Minna, S.; Bianchi, F.D.; De-Prada-Gil, M.; Ocampo-Martinez, C. A wind farm control strategy for power reserve maximization. Renew. Energy 2019, 131, 37–44. [Google Scholar] [CrossRef]
- Aziz, A.; Oo, A.T.; Stojcevski, A. Analysis of frequency sensitive wind plant penetration effect on load frequency control of hybrid power system. Int. J. Electr. Power Energy Syst. 2018, 99, 603–617. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Proposals for enhancing frequency control in weak and isolated power systems: Application to the wind-diesel power system of San Cristobal Island-Ecuador. Energies 2018, 11, 910. [Google Scholar] [CrossRef] [Green Version]
- Guizzo, E. Wind power in paradise. IEEE Spectr. 2008, 45, 38–45. [Google Scholar] [CrossRef]
- Benalcazar, P.; Suski, A.; Nski, J.K. Optimal Sizing and Scheduling of Hybrid Energy Systems: The Cases of Morona Santiago and the Galapagos Islands. Energies 2020, 13, 3933. [Google Scholar] [CrossRef]
- CONELEC Despacho y Operacion, Regulacion 006/00. Available online: https://www.regulacionelectrica.gob.ec/wp-content/uploads/downloads/2015/10/ProcedimientosDespacho.pdf (accessed on 16 July 2020).
- Ochoa, D.; Martinez, S. Frequency control issues in power systems: The effect of high share of wind energy. IEEE Lat. Am. Trans. 2018, 16, 1934–1944. [Google Scholar] [CrossRef]
- Willis, J.R. Modeling of emergency diesel generators in an 800 megawatt nuclear power plant. IEEE Trans. Energy Convers. 1993, 8, 433–441. [Google Scholar] [CrossRef]
- Mexis, I.; Todeschini, G. Battery energy storage systems in the United Kingdom: A review of current state-of-the-art and future applications. Energies 2020, 13, 3616. [Google Scholar] [CrossRef]
- Arsoy, A.; Liu, Y.; Johnson, B.K.; Ribeiro, P.F.; Crow, M.L. Energy storage systems for advanced power applications. Proc. IEEE 2002, 89, 1744–1756. [Google Scholar] [CrossRef]
- Kim, Y.J. Experimental study of battery energy storage systems participating in grid frequency regulation. Proc. IEEE Power Eng. Soc. Transm. Distrib. Conf. 2016, 2016, 1–5. [Google Scholar] [CrossRef]
- Toma, L.; Sanduleac, M.; Baltac, S.A.; Arrigo, F.; Mazza, A.; Bompard, E.; Musa, A.; Monti, A. On the virtual inertia provision by BESS in low inertia power systems. In Proceedings of the 2018 IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018. [Google Scholar] [CrossRef] [Green Version]


| Range (Hz) | Relay Operate Time |
|---|---|
| 57.5–62 | Instantaneous |
| 57.5–58 or 61.5–62 | <10 s |
| 58–59 or 61–61.5 | <20 s |
| 59–61 | Unlimited |
| Case | 1 | 2 | 3 |
|---|---|---|---|
| Overfrequency | 39.88 | 39.29 | 55.36 |
| Subfrequency | 44.89 | 40.91 | 57.39 |
| Case | 1 | 2 | 3 |
|---|---|---|---|
| Overfrequency | 22.92 | 27.08 | 47.92 |
| Subfrequency | 22.92 | 27.08 | 47.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pazmiño, I.; Martinez, S.; Ochoa, D. Analysis of Control Strategies Based on Virtual Inertia for the Improvement of Frequency Stability in an Islanded Grid with Wind Generators and Battery Energy Storage Systems. Energies 2021, 14, 698. https://doi.org/10.3390/en14030698
Pazmiño I, Martinez S, Ochoa D. Analysis of Control Strategies Based on Virtual Inertia for the Improvement of Frequency Stability in an Islanded Grid with Wind Generators and Battery Energy Storage Systems. Energies. 2021; 14(3):698. https://doi.org/10.3390/en14030698
Chicago/Turabian StylePazmiño, Iván, Sergio Martinez, and Danny Ochoa. 2021. "Analysis of Control Strategies Based on Virtual Inertia for the Improvement of Frequency Stability in an Islanded Grid with Wind Generators and Battery Energy Storage Systems" Energies 14, no. 3: 698. https://doi.org/10.3390/en14030698
APA StylePazmiño, I., Martinez, S., & Ochoa, D. (2021). Analysis of Control Strategies Based on Virtual Inertia for the Improvement of Frequency Stability in an Islanded Grid with Wind Generators and Battery Energy Storage Systems. Energies, 14(3), 698. https://doi.org/10.3390/en14030698