1. Introduction
Wireless power transfer (WPT) has become a major technology in modern automation applications because it provides less installation workload, greater flexibility and mobility, and at the same time eliminates the wear and tear of power supply cables [
1]. Static wireless charging and wired charging also have problems such as frequent charging, short cruising range, large battery consumption and high cost [
2,
3]. In this context, dynamic wireless power supply technology emerged. The inductive wireless power supply technology uses the principle of electromagnetic induction to transmit the electric energy in the track to the receiving coil, then charge the battery or directly power the motor. Therefore, the electrical equipment can be equipped with a small number of battery packs, and the power supply becomes safer and more convenient.
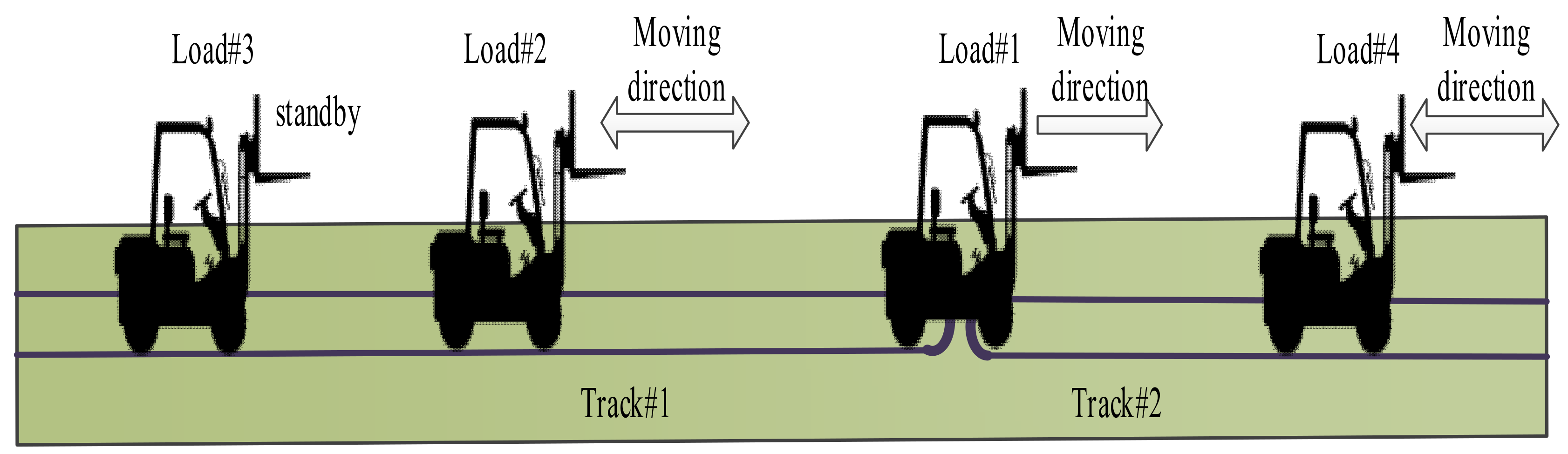
Figure 1 is a typical wireless power supply system.
In principle, each WPT system combines two magnetically coupled parts, primary and secondary, similar to a conventional transformer. The primary part consists of a track power supply and track cable (Litz wire) [
4]. The pick-up (secondary), can move with respect to the track [
5,
6]. Stable DC power is generated by the DC-DC controller to supply power to motors or other loads.
At present, the research of inductive dynamic wireless power supply technology in line inspection, Automated Guided Vehicle (AGV), electric vehicles and other equipment has gradually matured. The University of Auckland in New Zealand and the German Kangwen Company jointly developed the world’s first wireless charging bus with a power of 30 KW. At the same time, they also developed a 100 KW wireless power train prototype with a train track of 400 m [
7]. In 2009, KAIST successfully developed the first generation of on-line electric vehicles (OLEVs), using E-core power rails, with a transmission distance of 1 cm and an efficiency of 80% [
8,
9]. By 2015, the sixth generation of OLEVs was proposed, which could reduce the commercialization of infrastructure costs and increase the interoperability between dynamic electric vehicle charging and static wireless charging [
10]. Ref. [
11] applied the Inductive Coupled Power Transfer (ICPT) system to the railroad system, and output voltage and current of the pickup were measured, and then successfully made the high-speed train run at a speed of 10 km/h. In order to design a high-power online wireless power transfer system, a new design methodology for a series–series (SS)-tuned resonant, large air gap (7 cm), 300-kW, online wireless power transfer system especially for a train application is proposed [
12].
For the characteristic analysis of the multiload ICPT system, a dynamic model for a bidirectional ICPT system with multiple loads or pick-ups is proposed in [
13]. To demonstrate the versatility of the proposed model, frequency domain analysis has been presented and a power controller has been designed for a 1.5 kW bidirectional ICPT system with three pick-ups. In [
14], the problem of wireless power transmission to multi-load is focused on. To solve this problem, the team proposed the use of repeaters, which can place some loads diagonally on the transmitter. However, this method is not suitable for track transmission. The research team of Harbin Institute of Technology in China focused on the stable working conditions of the multiload wireless power transmission system, and used simulation analysis to verify the correctness of the conclusions obtained [
15]. The research team of Chongqing University analyzed the multiload mode of the electric vehicle wireless power supply system, focusing on the influence of the number of loads on the stability of the system, and obtained the boundary conditions of the number of loads [
16].
In the above domestic and foreign research on dynamic wireless power transmission and multiload wireless power transmission, most of them are studying how to model the system and analyze the structure and transmission characteristics of the system. In the research of multiload systems, it is more focused on the stability of the system and the number of loads. In a multiload system, since the motion state of each load may be different, what impact this dynamic change of load will have on the system, and what effect one load change will have on other loads, these issues need to be studied. Therefore, the goal of this article is to analyze how the output characteristics of the system and other loads will change during the dynamic process of load changes, and design a control circuit based on this change to ensure the stability of the load power supply process.
The following is the structure of this paper. The second part introduces the stable operating conditions of the multiload system. According to the conditions, the (inductance-double capacitances-series) LCC-S compensation circuit is selected, and the principle of the induction wireless power system is analyzed. Then, the formulas of output variables such as the primary rail current and output voltage are derived, and the value range of the series compensation inductor is analyzed.
Section 3 analyzes several different working states when the system supplies power to multiple loads, and establishes a simulation model to analyze the change of the working state of the primary side system and the change of load output characteristics when the mutual inductance or resistance changes. In the fourth part, the secondary side control is used to realize the stable output of the load and enhance the mutual independence between the loads.
Section 5 establishes an experimental platform to verify the analysis of the dynamic process. The sixth part is the summary of this article.
2. Analysis of Output Characteristics of Multiload ICPT System
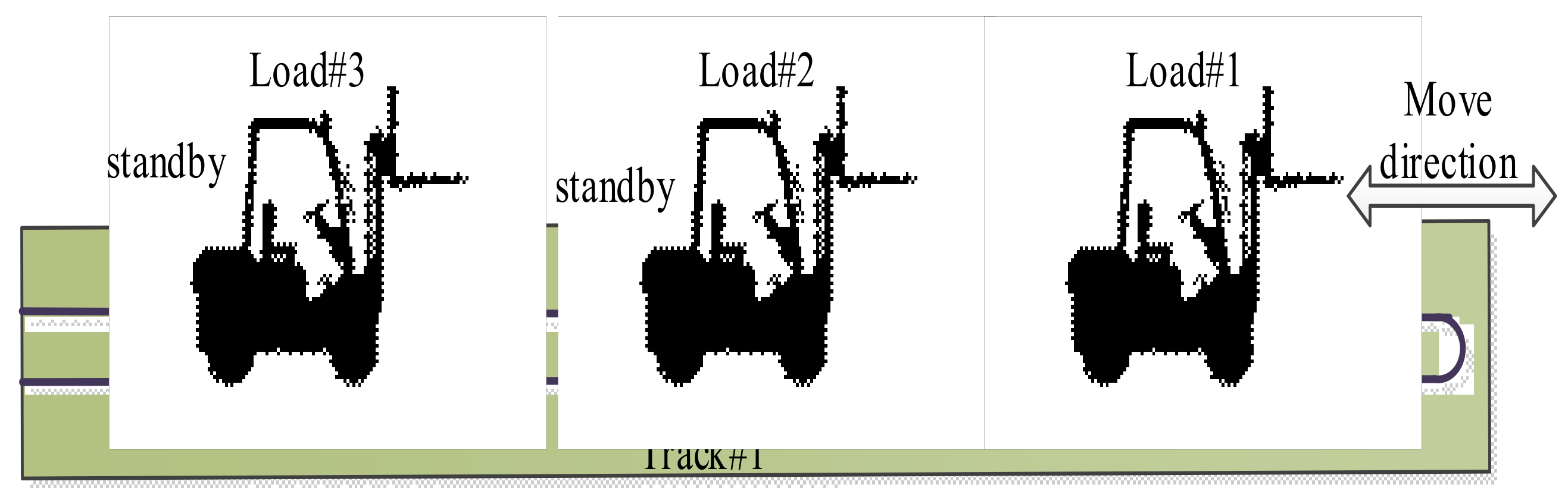
In practical applications, the system needs to supply power to multiple loads at the same time, such as supplying power to logistics vehicles, forklifts, etc. During the movement of these loads, since the receiving coil is installed at the bottom of the trolley and will be displaced with the movement of the trolley, the position between the receiving coil and the transmitting track will inevitably change. In the process of supplying power to the motor, its equivalent load will change with the change of speed, that is, the randomness of load switching and other variables will affect the operation of the system. Therefore, the conditions for the stable operation of the multi-load dynamic wireless power system are as follows: when any load in the system changes, the output of the other loads and the operation of the primary side system are not affected—that is, the loads are mutually independent.
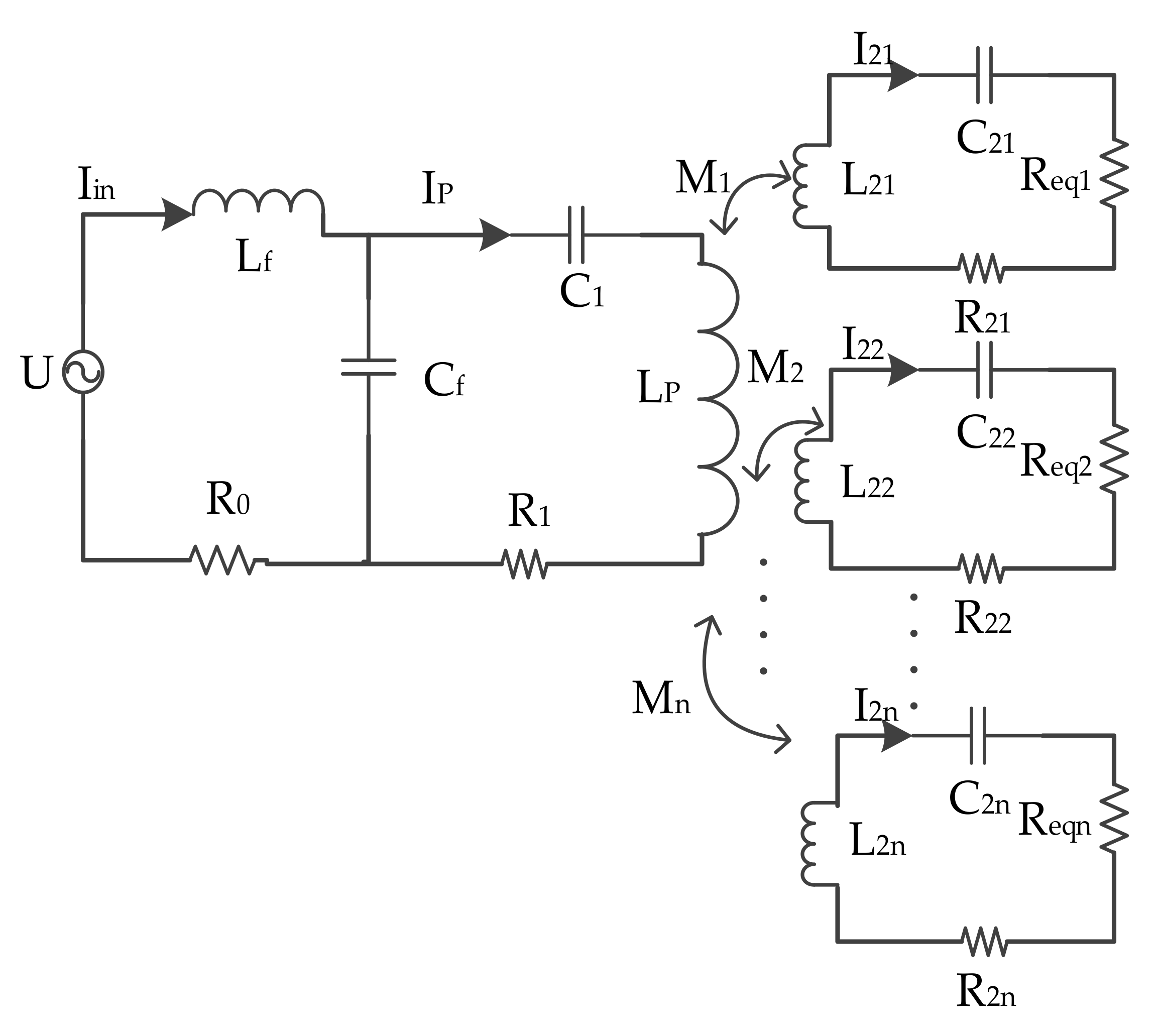
Since the development of wireless power supply technology, there are four basic resonance compensation networks and compound resonance compensation networks such as LCC-S. The most commonly used of the four basic compensation networks is the series-series (SS) structure. It is easy to realize matching capacitance in the SS structure. However, in a multiload system, if the transmitter adopts a series compensation structure, the track current cannot achieve a constant current. The LCC structure can achieve constant current output at the transmitter without considering the internal resistance of the coil, and does not need to add a control device. Therefore, this paper adopts the LCC-S type compensation network, and the equivalent circuit model of the system is shown in
Figure 2. Among them,
Lf,
Cf and
C1 are the compensation inductance and compensation capacitance of the LCC compensation network at the transmitter.
Lp,
L2i (i = 1, 2, ...) are the self-inductance of the track and the receiving coil.
C2i (i = 1, 2, ...) is the series compensation capacitance of each receiving coil.
U is a high-frequency AC power source, which is converted from a DC power source through an inverter.
Mi is the mutual inductance between each receiving coil and the track.
R0,
R1,
R2i are the self-resistance of
Lf,
Lp and
L2i, respectively.
Reqi is the equivalent resistance of the load.
In
Figure 2, the impedance of each load receiving end can be expressed as:
In order to enable the system to transmit more energy and work in a high-efficiency section, the working frequency of each secondary side should be the same as that of the primary side system—that is, the working frequency of the system should meet the following formula:
At this time, the reflected impedance of the primary side system is the sum of the reflected impedance of each secondary side:
Therefore, the input impedance of the primary side can be expressed as:
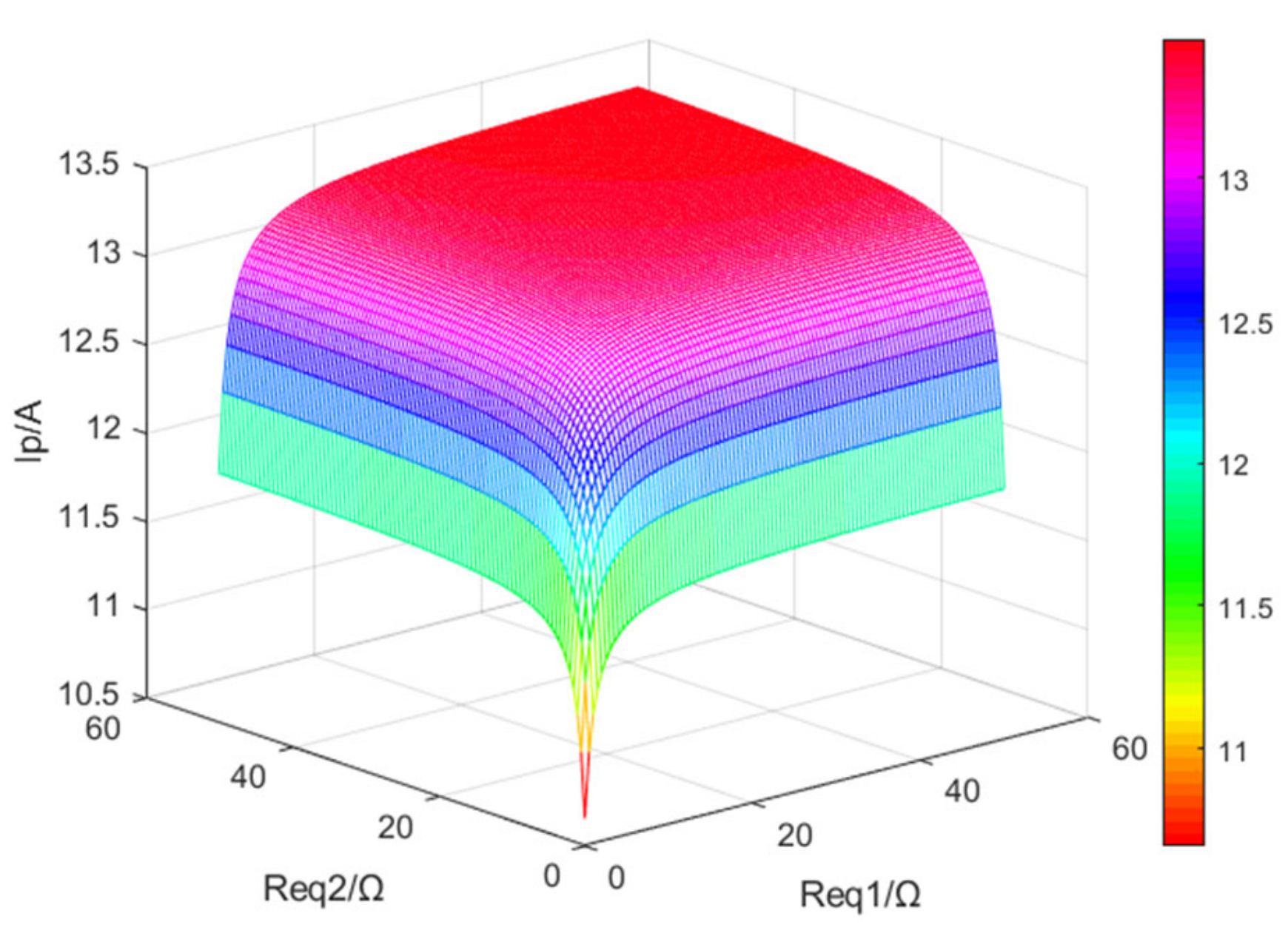
From Kirchhoff’s voltage equation, the track current and the output voltage at the load are:
It can be seen from Equations (5) and (6) that when the input voltage of the system is constant, the track current and the output voltage of each load are related to the series compensation inductance
Lf, the mutual inductance of the load and its equivalent impedance. We will analyze the impact of the load in the
Section 3. This part only analyzes the value of the series compensation inductor. For the value analysis of the series inductance
Lf, we will start with the transmission power
PoutΣ and efficiency
η. First, let
Lf = α ×
Lp (0 < α < 1), then the total output power of the multiload system is (assume that the coupling coefficient
ki between each receiving coil and the transmitting track is the same and the maximum value
kmax):
Let
, the total output and transmission efficiency of the system can be simplified as:
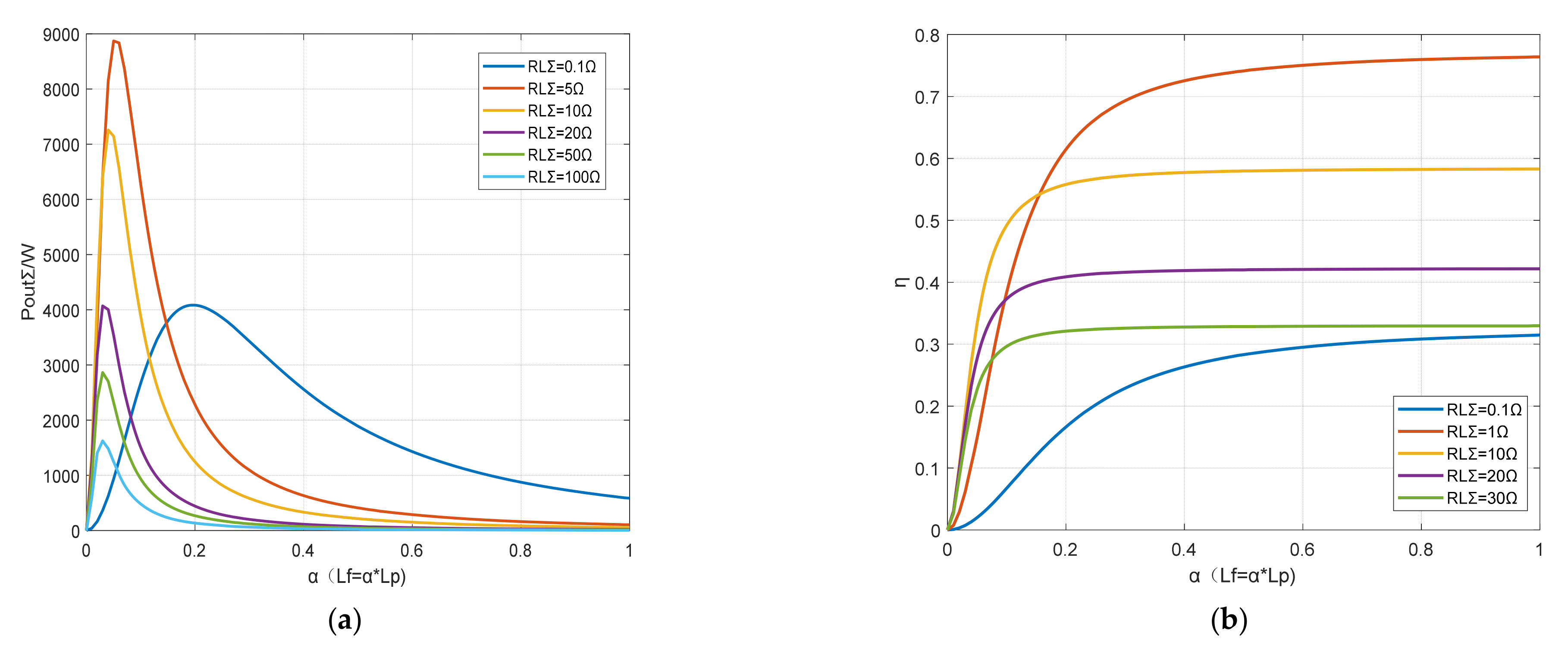
From Equations (8) and (9), plot the output power and efficiency curves with α in MATLAB, as shown in
Figure 3a,b. It can be seen from the
Figure 3a that with the increase in the load resistance, the maximum value of the output power is taken to be around α = 0.05. When
RLΣ = 0.1 Ω, the maximum value of
PoutΣ is around α = 0.1, so in terms of output power, the smaller the value of α, the better. However,
Figure 3b shows that when α < 0.2, the efficiency is low regardless of the value of
RLΣ. It is worth mentioning that when the value of
RLΣ is very small, the efficiency is also very low, as shown in the blue curve in
Figure 3b. In summary, in order to improve the transmission efficiency of the system and meet the transmission power, αa should be taken as around 0.2—that is,
Lf should be taken as around 0.2 ×
LP.
4. Multi-Load Wireless Power Supply System Based on Secondary Side Control
From the above dynamic process analysis, the output voltage of each load is not only related to the change of its own load resistance, but also related to the change of other loads on the same track. During the movement, in order to ensure the stability of the load output voltage, it is usually necessary to add a control circuit in the wireless power supply system.
The common voltage stabilization control strategies are the primary side control, secondary side control and overall control. The primary side control is mainly used to make the track current constant by changing the input voltage, but this method cannot make the output voltage of the load constant when the mutual inductance of the load changes. At this time, a secondary side control needs to be added to form an overall control.
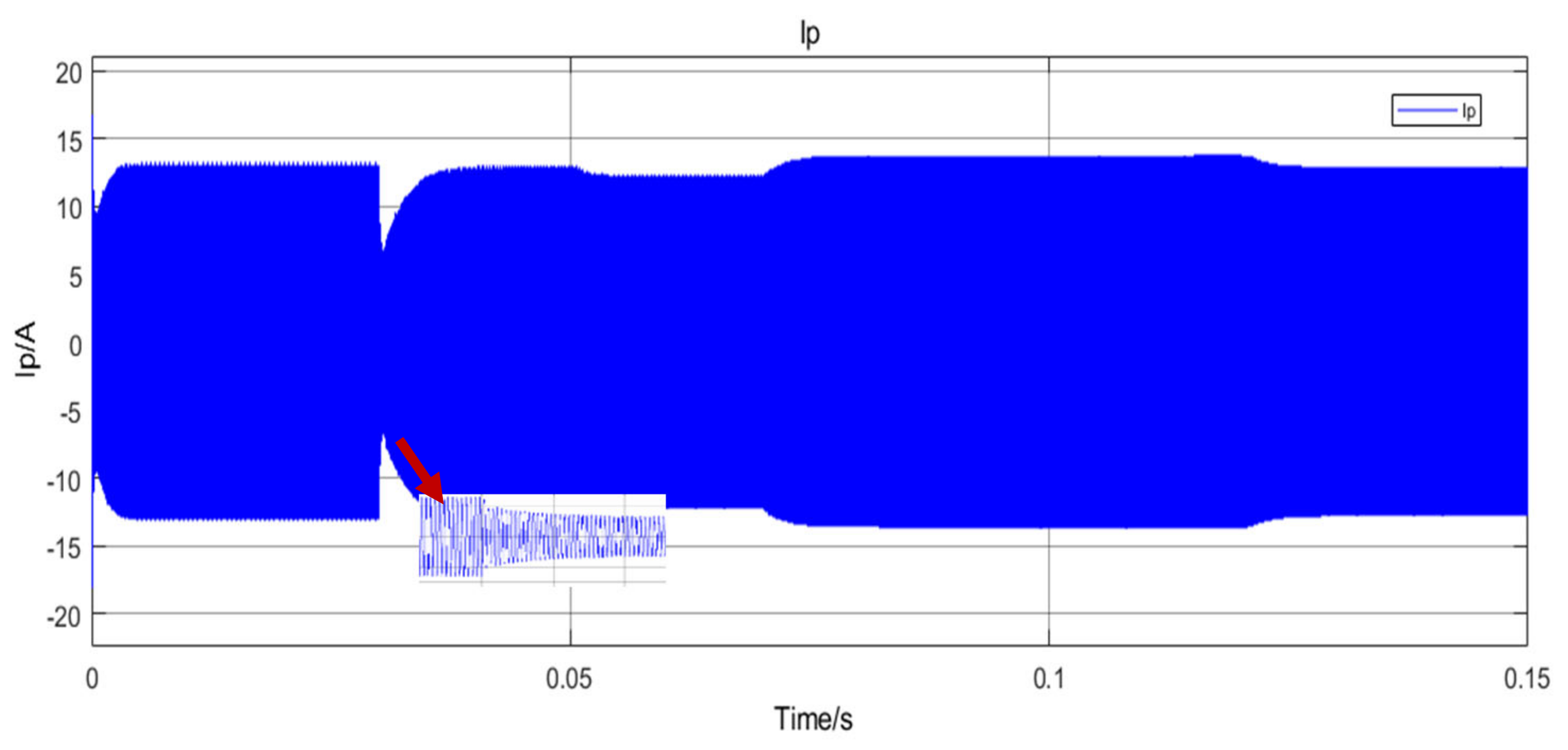
From the above analysis, the independence of each load on the secondary side is affected by the track current; so as long as the track current does not change, the load independency can be eliminated. However, it can be seen from
Figure 12 that when the load starts, the track current
Ip will drop, causing
UL1 to fluctuate downward, but from a general point of view, the increase or decrease in the track current
Ip is small when the load resistance changes. Therefore, this paper ignores the track current changes when designing the control circuit, and only considers adding a control circuit on the load side. A Buck converter is added after each rectifier circuit to achieve the purpose of constant voltage output by adjusting the duty cycle of the switch. The structure diagram of the secondary side circuit based on the Buck converter is shown in
Figure 13. The uncontrollable rectifier is connected to the load through the Buck converter.
There are many ways to control the Buck changer. In [
17], the PID and sliding mode control methods are used, respectively, and the two methods are compared. In the Simulink simulation, the response speed of the PID algorithm is 0.005 s, while the sliding mode control is only 0.001 s, so this papaer adopts the PWM sliding mode control method to realize the control to Buck converter.
In the process of wireless power supply, changes in load and mutual inductance will change the output voltage. In order to make the output voltage constant, the control strategy shown in
Figure 13 is designed. First set the load constant output voltage
ULre, and detect the actual output voltage
UL of the load, Then calculate the error
x1 between the output voltage and the reference voltage, that is,
x1=
ULre −
UL. At the same time, the error rate and integral are sent to PWMSMC together to calculate and adjust the output PWM duty cycle. The design process of PWMSMC is as follows:
Define the error variable
x1 of the output voltage:
Output voltage error rate of change
x2 and its integral
x3:
According to the working state of the switch tube
SW, the working of the Buck circuit can be divided into two modes. When
u = 1,
SW is turned on and
D is turned off, and the power supply charges the inductor
L, the capacitor
C and the load
Req. At this time, the inductor current
iL increases. When
u = 0,
SW turns off and
D turns on, inductor
L and capacitor
C discharge to load
Req, and
iL decreases [
18]. It can be seen that the circuit works in current continuous mode (CCM), and its state space equation is as follows:
To ensure the existence of the sliding mode state of the Buck converter, should be satisfied, where S is the sliding mode surface function—that is, α1, α2, and α3 are the sliding coefficients.
(1)
, at this time the switching function
u = 1.
(2)
, at this time the switching function
u = 0.
Synthesize Equations (14) and (15) to obtain simplified existence conditions:
Among them
,
,
. Finally, the equivalent control function Equation (16) is transformed into the duty cycle d. Among them
, the following relationship between the control signal and the ramp signal
is obtained. This formula can be used in the actual realization of PWMSMC, which is:
And .
To prove the stability of the above sliding mode control, the Lyapunov function is constructed as follows:
Derivation of Equation (18) to obtain the following equation:
From the above process, , and , so . According to the Lyapunov stability theory, the controller is progressively stable.
In order to verify the performance of the controller, a simulation model was built in Simulink to simulate the change of load
Req. The parameters of the wireless power supply system are shown in
Table 1.
According to the constant voltage control strategy, the duty cycle generated by PWMSMC is used to adjust the load output voltage value to the reference output voltage value.
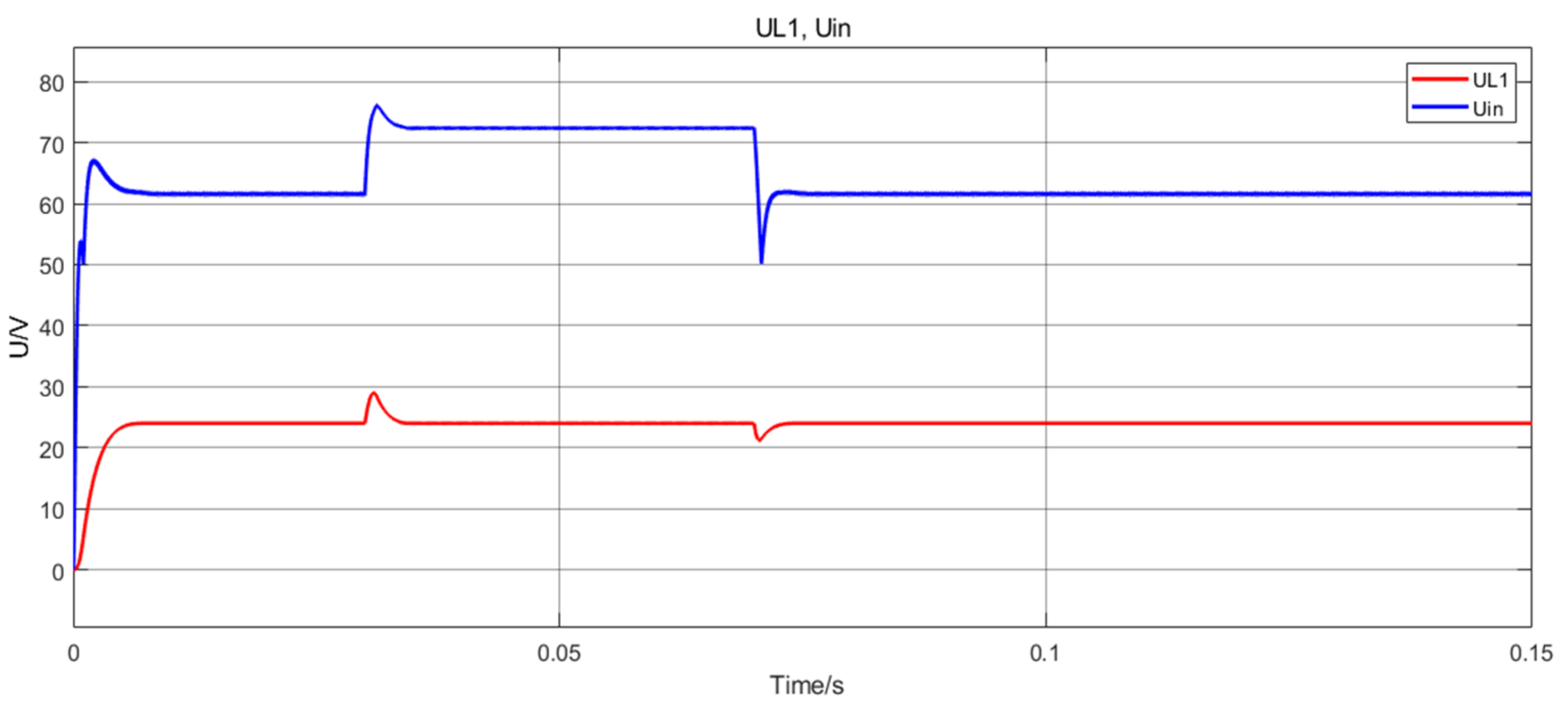
Figure 14 is a waveform diagram of the output voltage
UL1 of load #1 and the input voltage
Uin of the Buck circuit in the single-load system.
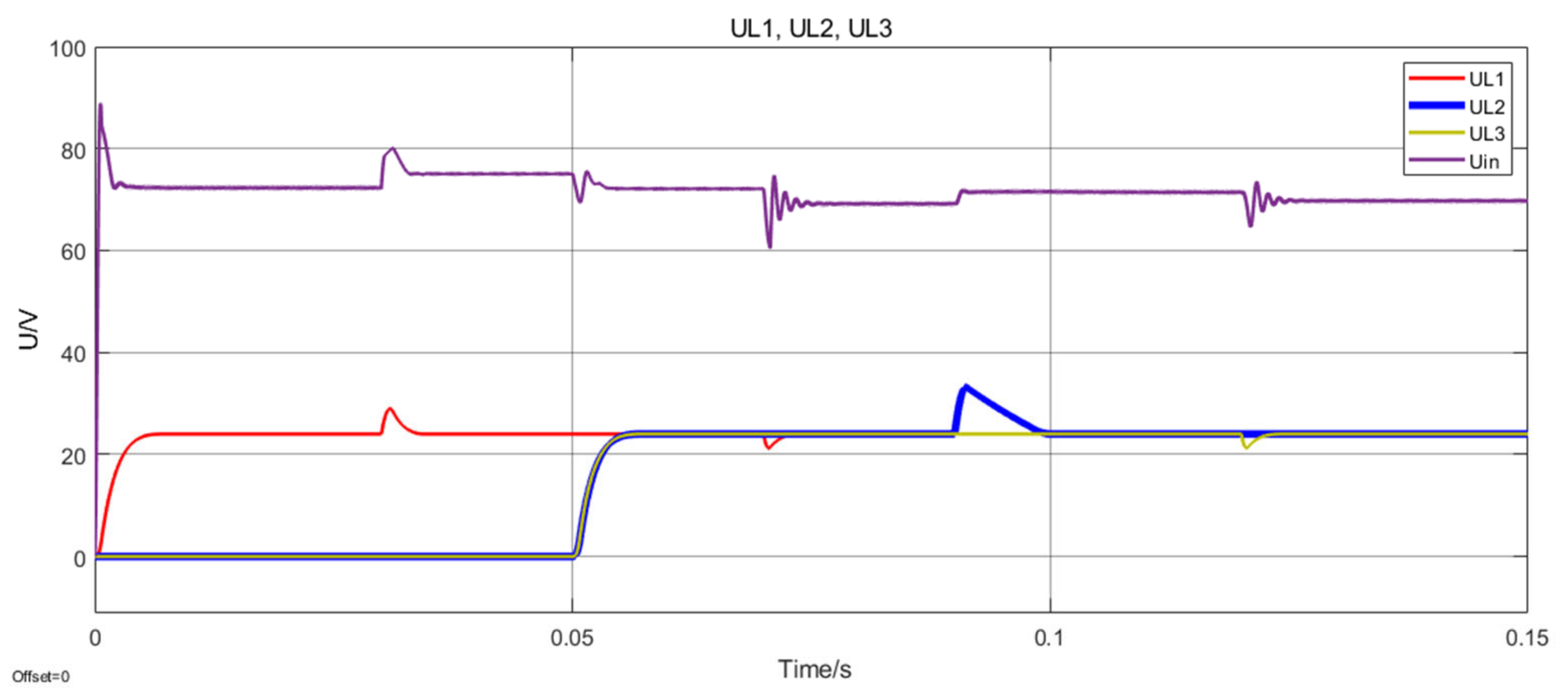
Figure 15 is a waveform diagram of the output voltage of each load and the input voltage
Uin of the Buck circuit in the three-load system. It can be seen from
Figure 14 that
Uin fluctuates due to the change of the resistance of load #1 at t = 0.03 s and t = 0.07 s. This is because the LCC-S system cannot maintain a constant voltage output due to the internal resistance of the inductor, but judging from the waveform of the output voltage
UL1 of load #1, t = 0~0.03 s, the resistance value of load #1
Req1 = 3 Ω, and the output voltage is the set reference voltage value of 24 V. When t = 0.03 s,
Req1 changes from 3 Ω to 10 Ω,
UL1 fluctuates upward, and returns to 24 V after 4 ms. When t = 0.07 s,
Req1 decreases from 10 Ω to 3 Ω,
UL1 fluctuates downwards, and stabilizes at 24 V after 2.7 ms. The results show that, in a single-load system, by controlling the change of Buck duty cycle by PWMSMC, a fast dynamic response and stable output voltage waveform can be obtained.
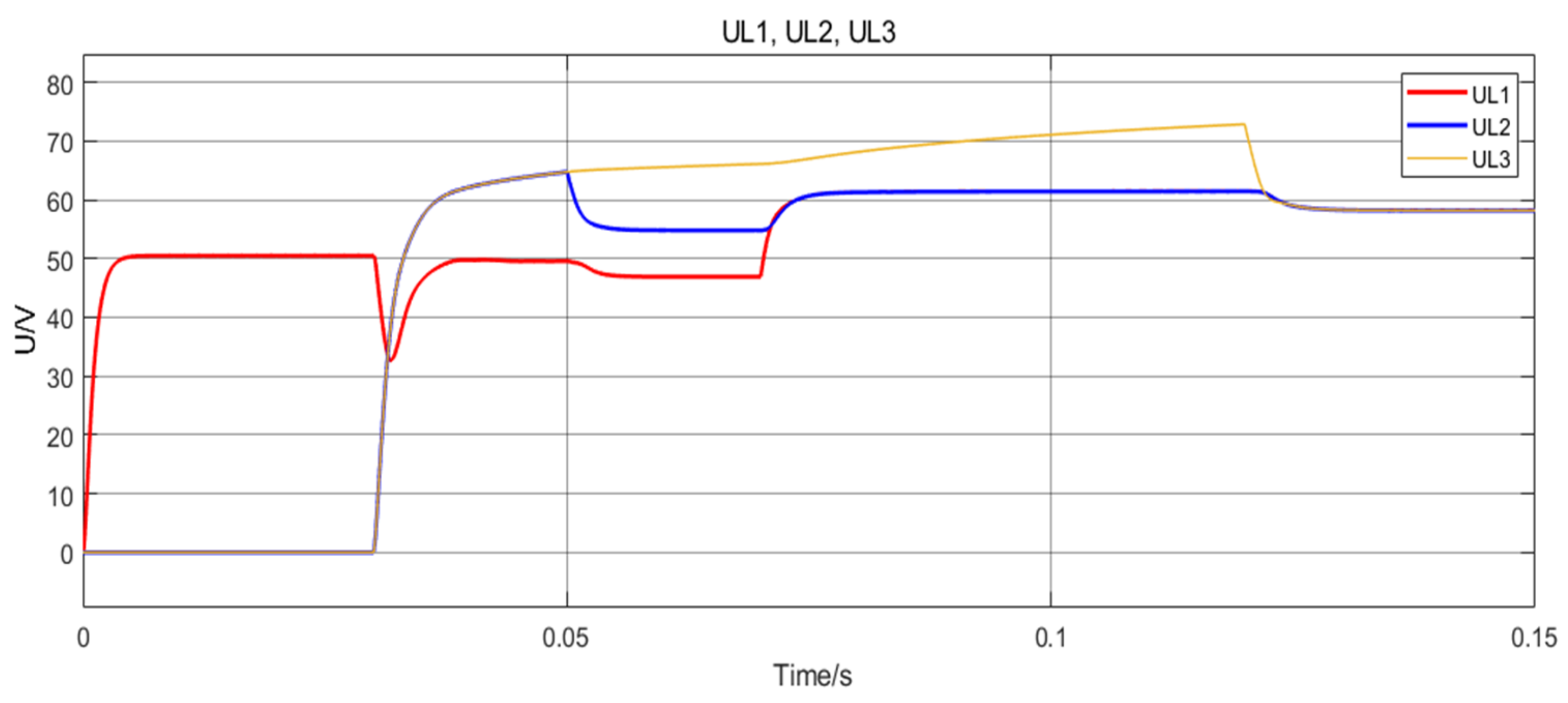
Figure 15 represents a three-load system. When t = 0.05 s, load #2 and load #3 start with
Req2 = 3 Ω and
Req2 = 10 Ω, respectively. At this time, it can be seen that the output voltage
UL1 of the load #1 has not fluctuated and has been maintained at 24 V. At t = 0.09 s, when the resistance of load #2 suddenly increases to 50 Ω, the voltage of load #1 and load #3 does not fluctuate. Therefore, it can be considered that the disturbance between each load has been completely eliminated, which solves the problem of affecting the output of other loads when multiple loads are started at the same time in the system. For load #2, when the resistance value increases greatly, the fluctuation time of
UL2 is about 9.8 ms, so the control system has faster instantaneous characteristics and meets the needs of the system’s dynamic stability.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}