1. Introduction
Vehicle electrification, the elegant solution to the issues of fossil fuel use reduction and CO
2 emissions arising from the growing dependency on internal combustion engine (ICE) vehicles, has been the topic of a significant body of literature [
1]. From a customer perspective, both high charging time and the lack of charging points constitute the main challenges that currently limit the adoption of electric vehicles [
2]. Off-board and on-board schemes can be utilized for electric vehicle (EV) charging. The former offers a high power transfer capability, albeit at a high installation cost, whereas the latter can be directly tied to a single-phase or three-phase grid; however, restricted power transfer capability is an obvious drawback [
3]. To overcome the aforementioned demerits of on-board battery chargers (OBCs), emerging integrated battery chargers that exploit the drivetrain elements for the battery charging process have been proposed [
4]. The separate charging units are, therefore, omitted.
The most commonly used EV traction machines are induction motors (IMs) and permanent magnet synchronous machines (PMSMs), with either three-phase or multiphase configurations [
5]. Multiphase-based EV drives are of particular interest due to their higher degrees of freedom that ensure zero average torque production during the charging process. Furthermore, multiphase machines offer a variety of advantages, such as lower converter rating per-phase, inherent fault tolerance, and reduced heat sink prerequisites [
6]. On the contrary, a more complicated converter and controller are required. Various nine-phase [
7,
8], six-phase [
9,
10], and five-phase [
11] integrated chargers have been investigated in the literature. The published topologies are based on either induction or PM motors. Amongst the PM machines, the surface-mounted PM (SPM) and interior PM (IPM) machines are preferably deployed in EVs [
12].
When designing an electrical machine for EV applications, the main criteria, in addition to cost, are maximum torque density, minimum losses, low torque ripple, and constant power speed range (CPSR) [
13]. In this regard, fractional slot concentrated winding (FSCW) layouts have shown promising performance owing to their high slot fill factor (particularly when the segmented structure is adopted), short end turns (i.e., curtail copper losses in end windings), low cogging torque, and flux-weakening capability [
14]. Nevertheless, considerable rotor losses and parasitic effects (e.g., audible noise and undesired vibrations) are evident due to the inherent space harmonics that constitute the main drawbacks of most FSCW configurations. Considerable work has therefore been reported aiming to mitigate these demerits [
15,
16]. Performance-wise, PM machines equipped with a FSCW correspond to a substantial improvement in torque/power densities, while flux-weakening capability and fault-tolerance capability are significantly enhanced, particularly when multiphase configurations are recruited [
17,
18].
Furthermore, the torque performance (i.e., the average torque production and torque ripple) and core losses are significantly affected by the design parameters of the employed propulsion motor such as the slot opening width and PM width-to-pole pitch ratio [
19,
20]. The reduction in parasitic torque ripple and core losses is beneficial in the application of integrated OBCs as the resulting heat from core losses and the inevitable vibration and noise from the torque ripple could be mitigated [
21]. Despite the fact that numerous publications have presented possible methods of reducing cogging torque, torque ripple, and core losses in the motoring mode of operation [
19,
20,
21], a concept satisfying all of the aforementioned requirements under this emerging EV charging process has not been conceived so far.
From the EV charging perspective, various slot/pole combinations based on six-phase layouts have been considered in the available literature as viable candidates, in order to guarantee a nullified torque production under the charging mode [
22,
23]. According to the extensive analysis carried out as in Metwly et al. [
3], an asymmetrical six-phase 12-slot/10-pole configuration has shown better performance with regard to minimizing eddy current rotor losses under both the motoring and charging modes of operation when compared with its dual three-phase counterpart.
Thermal analysis, electromagnetic analysis, and mechanical modeling constitute the main processes undergone during the design of electric machines. Various well-known numerical techniques (e.g., 2-D and 3-D finite element (FE) models) and analytical approaches have been introduced in the literature [
24,
25]. Analytical models are broadly categorized into the lateral force (LF) method, complex Schwarz Christoffel (SC) transformation, and the subdomain (SD) model [
26]. From a modeling perspective, numerical techniques are most accurate, albeit with an expensive computational burden. On the other hand, the analytical magnetic equivalent circuit (MEC) approach is highly preferred as a means to predict the electromagnetic parameters in the early design stage because it saves substantial time [
27]. The MEC model represents the machine with a magnetic reluctance network that depends on machine geometrical parameters and the nonlinear characteristics of the assigned magnetic material. Surely, the discretization level greatly affects the accuracy of the MEC model. Furthermore, it is necessary to assure that the air gap reluctance paths vary with the rotation of the employed machine, which complicates the MEC [
28]. The MEC model for an SPM machine has been primarily introduced as in Qu et al. [
29].
This paper provides a thorough analysis of a six-phase 12-slot/10-pole integrated OBC using SPM machines with either asymmetrical six-phase or dual three-phase winding arrangements. The main contribution of this paper is to present the performance of the EV traction machine under the charging process, shedding light on the influence of various design parameters, namely the slot opening width and PM width-to-pole pitch ratio, on the torque ripple and core losses under both modes of operation. Initially, the machine geometrical dimensions are initialized as inputs to the efficient MEC model introduced as in Hemeida et al. [
28]. After that, the optimal solution can be selected based on the Pareto optimization technique according to the imposed selection criteria [
30]. Then, the variation in torque ripple and core losses is computed with respect to various slot openings and magnet widths. The optimal machine is then designated. Finally, the performance characteristics of the selected SPM machine are compared using the analytical model and finite element (FE) analysis to verify the analytical model outputs. This paper is limited to SPM machines as the optimization problem will invoke more parameters in the case of IPM machines, which will be the target for future studies.
2. Operating Principle of Six-Phase Charger
The vehicle-to-grid (V2G) concept depicts the connection between EVs and the grid to enable bidirectional power flow [
31,
32]. Bidirectional chargers underpin power flow control from the grid-to-vehicle (G2V), vehicle-to-home (V2H), external load (V2L), or vehicle-to-grid (V2G) [
31,
32].
A typical six-phase integrated OBC configuration is depicted in
Figure 1. It consists of powertrain elements, namely a six-phase traction machine and an inverter, as well as a battery tied to a DC–DC converter to control the DC link voltage. The DC link voltage is maintained at 600 V through boost operation [
33]. This study investigates two possible six-phase winding topologies, namely, dual three-phase (
) and asymmetrical six-phase (
) configurations, where
is the spatial phase angle between the two three-phase winding sets.
Figure 2 depicts the FSCW-based SPM winding layouts.
The proposed charger can easily switch between the propulsion and charging modes of operation with a simple hardware reconfiguration that is accomplished by switches
, as shown in
Figure 1a for the asymmetrical six-phase configuration. When the propulsion mode is initiated, the grid is disconnected, switch
is open, and switches
–
are closed. Stator three-phase winding groups are connected in series forming a single neutral point configuration, while each three-phase winding set is being fed from a separate three-phase inverter. Meanwhile, only switch
is needed in the case where the dual three-phase configuration is employed, as depicted by
Figure 1d. In that case, the two three-phase winding sets are connected in series forming an open-end winding configuration during propulsion mode.
In the charging mode, switch
is closed and switches
are open, and the grid is connected to the bidirectional converter after synchronization. For the asymmetrical six-phase layout, the grid line currents are shared by the two three-phase winding sets using a different phase sequence order (e.g., grid phases
,
, and
are connected to the far end of the first set, phases
,
, and
, respectively; however, the phase sequence of the second three-phase set when connected to the grid is
,
, and
). Therefore, the field produced by the first winding group opposes the field produced by the second group [
10]. This nullifies the total torque-producing magnetizing flux component, and hence, the torque production will be zero. For both dual three-phase and asymmetrical six-phase topologies, zero average torque production is guaranteed with a low torque ripple component. It should be noted that
and
for the dual three-phase and asymmetrical six-phase arrangements, respectively, in the charging mode of operation. Moreover, the connection of windings will be
-
,
-
, and
-
for the dual three-phase machine. Unity power factor operation at the grid side can also be ensured by controlling the direct current component of the three-phase grid currents at the charging current level, while the quadrature current is set to zero. The machine windings are utilized for grid current filtering [
34].
The magnetomotive force (MMF) spectra produced in the propulsion mode are shown in
Figure 3, where the torque-producing component
is inherently accompanied with the dominant slot harmonic
, where
is the harmonic order. Clearly, the asymmetrical configuration will suppress all sub-harmonics under the propulsion mode, yielding a notable reduction in the rotor eddy losses, as depicted in
Figure 3b. The torque-producing component,
, is nullified under the charging mode, as shown in
Figure 4. Therefore, zero average torque production during the charging process is ensured.
4. Torque Ripple and Core Losses Reduction
Performance-wise, it is required to minimize the torque ripple (peak-to-peak) magnitude in order to lower vibrations and noise in SPM machines. The main cause of torque ripple—besides inevitable slot harmonics—are the MMF space harmonic components, which are more dominant in the case of FSCW-based PM machines. Furthermore, reduction in the core losses (e.g., stator and rotor core losses) is highly preferred to avoid thermal demagnetization. The PM loss is an important loss component in FSCW-based PM machines; however, the estimation of this component is challenging in MEC modeling. Therefore, the estimation of the PM loss component on the basis of the MEC model is postponed for future work.
In this section, the two winding configurations are assessed under both charging and propulsion modes of operation by considering the effect of slot opening width
and PM width-to-pole pitch ratio
on the average torque, torque ripple, maximum PM magnetic field intensity, and core losses.
Table 4 reveals the variation range and the initial value of the two design parameters. Moreover, the enhanced machine that corresponds to optimized design parameters is selected based on the Pareto optimization technique, presented in the previous section.
4.1. Effect of Slot Opening Width
The design trade-off between the average torque and torque ripple has been investigated by changing the slot opening ratio
from 0.05 to 0.49. The slot opening has a considerable impact on the average and torque ripple components under both operational modes, as shown in
Figure 7. Taking the asymmetrical six-phase machine as an illustrative example, the average torque notably decreases from 176.3 to 142.4 Nm at slot opening ratios of 0.05 and 0.49, respectively, in the motoring mode, while the torque ripple varies from 10.3 to 18.2 Nm at the same ratios. In the charging mode, a considerable increase in the torque ripple from 9 to 20 Nm can be observed in
Figure 7d. It can be noted that the maximum average torque and minimum torque ripple cannot be achieved at the same slot opening width. The same conclusion can be considered for the dual three-phase machine.
Figure 7 indicates the superiority of the asymmetrical configuration over the dual three-phase one under the motoring mode, whereas a substantial decrease in the torque ripple is obtained through employing the dual three-phase configuration during the charging process, as illustrated in
Figure 7d. For neodymium (NdFeB) magnets, the demagnetization occurs at 2000 kA/m at the low temperature of 20 °C at 1100 kA/m at an operating temperature of 60 °C.
Figure 7e depicts the variation in the PM magnetic field intensity with the slot opening ratio in the propulsion mode. The variation in the PM magnetic field intensity in the charging mode is presented in
Figure 7f. From the PM demagnetization perspective, both arrangements offer good performance in the propulsion; however, the PM demagnetization risk increases in the charging.
Figure 8 shows the variation in stator and rotor core losses at various slot opening ratios with either dual three-phase or asymmetrical six-phase layouts under the propulsion and charging modes of operation. Under propulsion, the wider the slot opening width, the higher the rotor core loss. However, a dramatic reduction in the stator core loss can be observed with the increase in the slot opening ratio. Taking the dual three-phase configuration as an illustrative example, the rotor core loss is 7.6 W at a slot opening ratio of 0.05 compared to 52.3 W at a ratio of 0.49. On the contrary, the stator core loss is reduced by 48.8%. During charging, the variation in the slot opening width has a modest effect on the rotor core loss; however, the stator core loss decreases from 15.8 to 3.2 W at slot opening ratios of 0.05 and 0.49, respectively, as shown in
Figure 9. In the charging mode, the dual three-phase-based topology is better than the asymmetrical six-phase-based one as the corresponding core losses are far lower at all slot opening widths.
4.2. Effect of PM Width-to-Pole Pitch Ratio
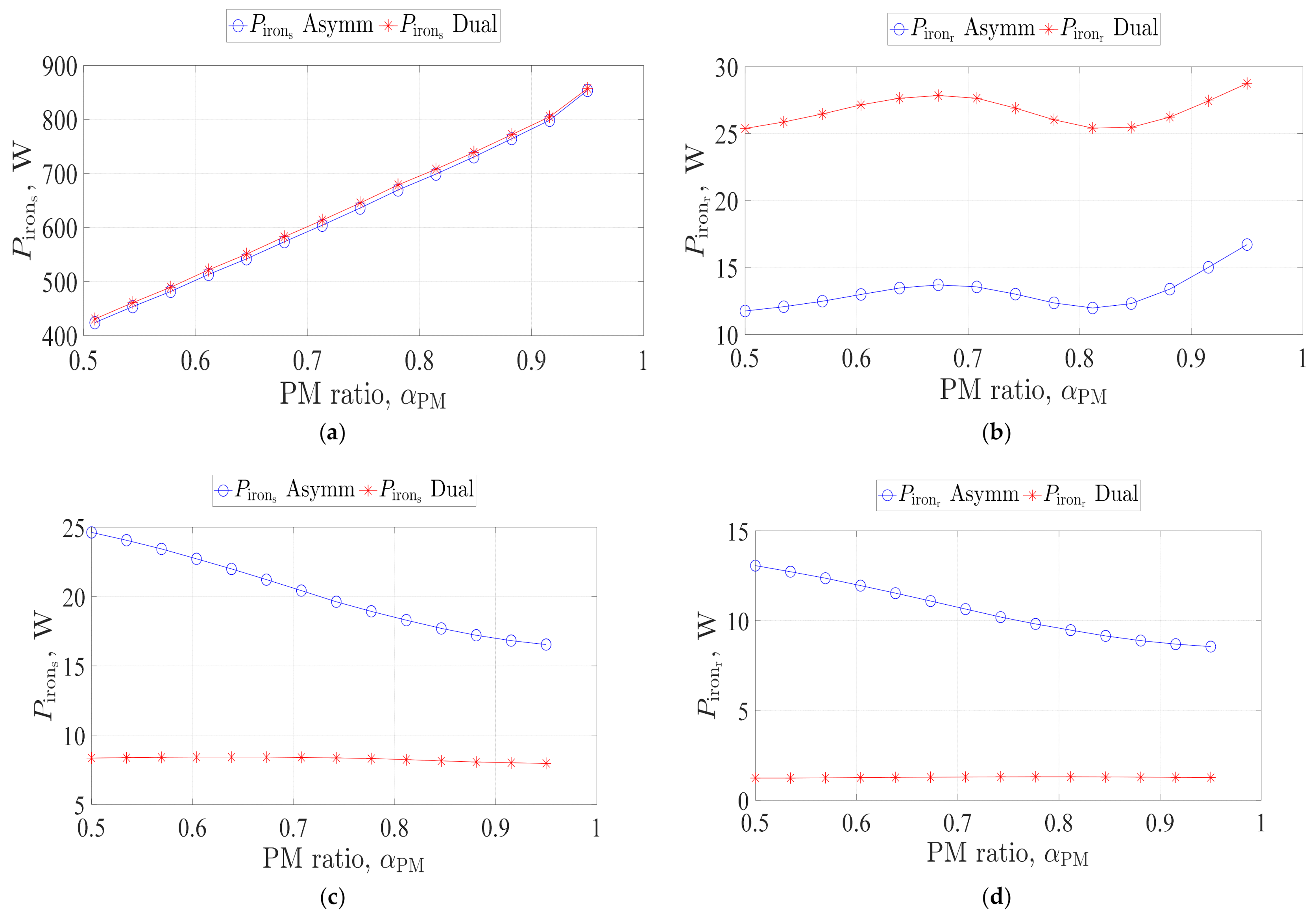
The PM width-to-pole pitch ratio,
, has a substantial effect on the average torque, torque ripple, and PM magnetic field intensity, as illustrated in
Figure 9. In the propulsion mode, the average torque is proportional to
for the two winding configurations. Taking the dual three-phase configuration as an illustrative example, the average torque is 137.6 and 170.1 at
= 0.51 and 0.95, respectively. In that case, the torque ripple varies from 18.7 to 11.9 Nm, as shown in
Figure 8b. In the charging mode, a slight change in the torque ripple with respect to the PM ratio can be noticed for the dual three-phase configuration, as shown in
Figure 8d. Nevertheless, the torque ripple varies considerably between 15.5 Nm at
= 0.5 and 9.8 Nm at
= 0.95 when the asymmetrical six-phase topology is utilized. This reveals the superiority of the dual three-phase configuration under the charging mode of operation. A considerable change in the PM magnetic field intensity with the PM ratio can be seen in
Figure 8e,f, respectively, under the propulsion and charging modes of operation.
By increasing
, the core losses increase proportionally for both winding layouts under the propulsion mode, as shown in
Figure 10. In the charging mode, for the dual three-phase configuration, the core losses can be considered constant. Meanwhile, a considerable change in the core losses with respect to various PM magnet width-to-pole pitch ratios can be noticed in the case where the asymmetrical six-phase layout is employed. For instance, the stator core loss reaches 24.6 W at
= 0.5 compared to 16.5 W at
= 0.95. Similarly, the higher the PM magnet ratio, the lower the rotor core loss. It can be noted that the core losses are considerably low for the dual three-phase-based topology when compared with the asymmetrical six-phase-based one, as shown in
Figure 10c,d.
4.3. Optimal Machine Selection
It is now possible to define the best design parameters at which the optimum trade-off between the average torque, torque ripple, and core losses can be achieved under various operational modes based on the Pareto optimization technique. The cost values of the Pareto technique constitute the average torque
, the torque ripple
, and the rotor core loss
in the propulsion mode; correspondingly, they are the torque ripple
, the stator core loss
, and the rotor core loss
under the charging mode. The optimization results for the PM machine employing both the asymmetrical six-phase and the dual three-phase winding arrangements are depicted in
Figure 11 and
Figure 12, respectively. The optimal point (highlighted in green) is efficiently achieved according to the optimum trade-off between the various objectives. The optimal design and machine parameters for the asymmetrical winding configuration are listed in
Table 5. In the following section, the results of the MEC-based analytical model will be validated using FE analysis. The same optimized design values (i.e.,
= 0.15 and
= 0.88) are used for comparison between the asymmetrical six-phase and dual three-phase winding layouts.
5. Finite Element Validation
In this section, the optimal machine with the optimized slot opening ratio (
= 0.15), as well as optimum PM width-to-pole pitch ratio (
= 0.88), has been validated using the ANSYS software (V19, ANSYS Inc., Canonsburg, PA, USA). The optimal machine with the two different winding configurations has been assessed under both motoring and charging operational modes using the design parameters outlined in
Table 3 considering the new values of slot opening and PM width-to-pole pitch ratios.
Table 6 reveals the differences between the analytical and FE models with respect to the average torque production, the peak-to-peak torque ripple, rms phase voltage, and core losses.
An absolute agreement between both models with respect to the developed torque and full-load phase voltage has been highlighted in
Figure 13 and
Figure 14, respectively, for the dual three-phase and asymmetrical six-phase configurations under the motoring mode.
Figure 15 depicts that the average torque is nullified under the charging, which is a basic necessity of the integrated OBCs. In the charging process, a similarity between the FE model and the analytical one for the full-load voltage is shown in
Figure 16, and both asymmetrical six-phase and dual three-phase configurations are assessed.
Furthermore, the electromagnetic forces are computed using the Maxwell stress tensor defined in [
38]. The
x and
y force components
and
, respectively, are derived from the radial and circumferential forces
and
, respectively. These components are deduced from the radial and circumferential flux densities
and
, respectively. The equations describing
and
are:
where
is the vacuum permeability. The
and
components are computed by integrating the projection of
and
on the
x and
y directions. The integration is done over an enclosed surface in the average air gap radius (
. The projection can be expressed as in (9):
where
is the circumferential angle.
Figure 17a,b show the force computations in the charging mode from the FE and the analytical model for the asymmetrical and dual three-phase machines, respectively. The comparison shows a good correspondence between both models for the dual three-phase machine.
In addition, the dual three-phase machine gives forces in the kilonewton range. This can lead to a reduction in the lifetime and may cause eccentricity in the long run. Hence, this affects the machine performance. However, for the asymmetric machine, the forces are low, up to 2.5 N. This means that the machine can exhibit a much higher loading without a reduction in the rotor or bearing lifetime.
Furthermore, efficiency maps for both optimal asymmetrical six-phase and dual three-phase winding layouts are presented in
Figure 18. Both winding arrangements offer high efficiency at various loading points.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}