
Path Selection for the Inspection Robot by m-Generalized q-Neutrosophic PROMETHEE Approach




Abstract
:
1. Introduction
2. Path Selection for the Autonomous Inspection Robot
2.1. Route Assessment Strategy
2.2. PROMETHEE-MGQNS method
2.2.1. The Preliminaries of the m-Generalized q-Neutrosophic Set
2.2.2. The m-Generalized q-Neutrosophic PROMETHEE
- The decision matrix is constructed from the elements, where each element represents the criterion value, relative to the alternative.
- 2.
- The decision matrix is then normalized by applying vector normalization approach. The result of this step is a normalized decision matrix , with the elements calculated as follows:
- 3.
- Next, the neutrosophic conversion of the decision matrix is conducted by applying the standard modification rates [39]. After this step, the elements of the decision matrix are modeled as the m-generalized q-neutrosophic form of . Here, correspond to the truth, indeterminacy and falsity membership functions, which follow the condition of .
- 4.
- Alternatives (in this case—candidate routes ) are ranked by comparing between all pairs of and , and the aggregated preference index is calculated by:
- 5.
- Then, the calculation of the positive and the negative outranking flows is conducted by the following equations:
- 6.
- The net flow value is measured to determine the final rank of an alternative:
- 7.
- The deneutrosophication of the net flow value is completed by calculating the score value for each route by applying the following equation:
- 8.
- The final interpretation of the PROMETHEE-mGqNS results is conducted. The ranking of the alternatives with the positive score value is taken as is, while the best alternatives for the negative score values have the smallest score value.
3. Case Study: Results and Discussion
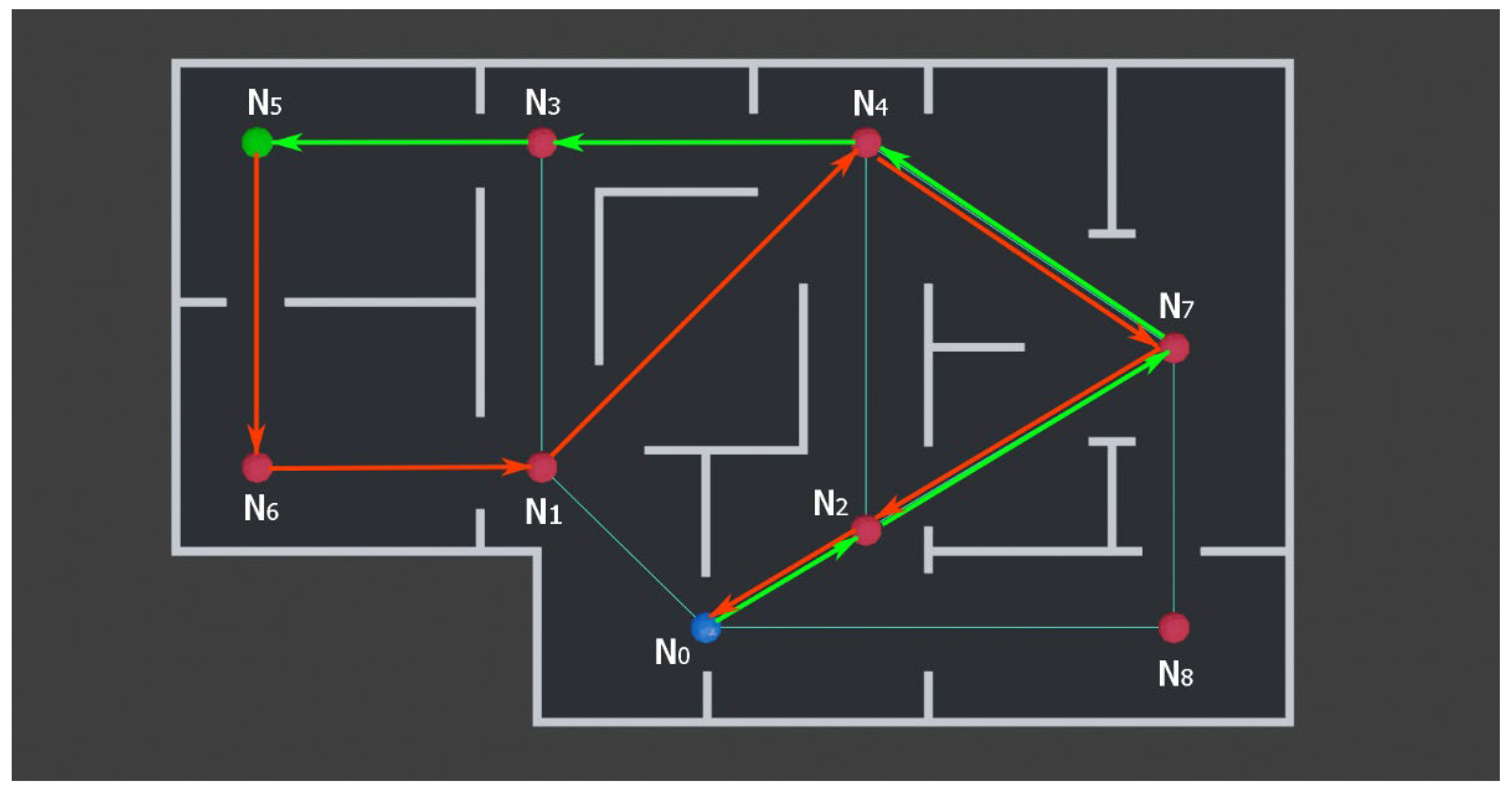
- Scenario 1: setting the node priority vector to and the node crowding vector computes the route to the target node, and route to the robot starting position. In this scenario, it can be observed that all of the prioritized nodes are visited by the monitoring robot. Additionally, node is avoided while moving to the target, and node is avoided while moving back to the starting position. Thus, it can be reasoned that the proposed strategy can balance the route optimization requirements of avoiding multiple crowded nodes, while also increasing the number of monitored areas along the way, showcasing the stability of the proposed strategy.
- Scenario 2: setting the node priority and the crowding vector values to zero computes the same path to the target node and back to the robot control station and . In this scenario, the node priority and node crowding criteria values are not considered when selecting the optimal route. Therefore, the decision-making strategy optimizes the three remaining criteria: the sum of node idleness, the ratio between the computed route and the shortest route, and the number of charging stations along the planned route. As the shortest routes between the and are and , and the sum of idleness is also zero, the route with an additional robot charging station is prioritized.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fragapane, G.; de Koster, R.; Sgarbossa, F.; Strandhagen, J.O. Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda. Eur. J. Oper. Res. 2021, 294, 405–426. [Google Scholar] [CrossRef]
- Menendez, O.; Auat Cheein, F.A.; Perez, M.; Kouro, S. Robotics in Power Systems: Enabling a More Reliable and Safe Grid. IEEE Ind. Electron. Mag. 2017, 11, 22–34. [Google Scholar] [CrossRef]
- Patle, B.K.; Babu, L.G.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Dugarjav, B.; Lee, S.-G.; Kim, D.; Kim, J.H.; Chong, N.Y. Scan matching online cell decomposition for coverage path planning in an unknown environment. Int. J. Precis. Eng. Manuf. 2013, 14, 1551–1558. [Google Scholar] [CrossRef]
- Gonzalez, R.; Kloetzer, M.; Mahulea, C. Comparative study of trajectories resulted from cell decomposition path planning approaches. In Proceedings of the 2017 21st International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2017; pp. 49–54. [Google Scholar]
- Gill, M.A.C.; Zomaya, A.Y. A cell decomposition-based collision avoidance algorithm for robot manipulators. Cybern. Syst. 1998, 29, 113–135. [Google Scholar] [CrossRef]
- Lulu, L.; Elnagar, A. A comparative study between visibility-based roadmap path planning algorithms. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3263–3268. [Google Scholar]
- Garrido, S.; Moreno, L.; Abderrahim, M.; Martin, F. Path Planning for Mobile Robot Navigation using Voronoi Diagram and Fast Marching. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2376–2381. [Google Scholar]
- Ge, S.S.; Cui, Y.J. Dynamic motion planning for mobile robots using potential field method. Auton. Robots 2002, 13, 207–222. [Google Scholar] [CrossRef]
- Sfeir, J.; Saad, M.; Saliah-Hassane, H. An improved Artificial Potential Field approach to real-time mobile robot path planning in an unknown environment. In Proceedings of the ROSE 2011-IEEE International Symposium on Robotic and Sensors Environments, Montreal, QC, Canada, 17–18 September 2011; pp. 208–213. [Google Scholar]
- Kang, X.; Yue, Y.; Li, D.; Maple, C. Genetic algorithm based solution to dead-end problems in robot navigation. Int. J. Comput. Appl. Technol. 2011, 41, 177–184. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Fast Genetic Algorithm Path Planner for Fixed-Wing Military UAV Using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Moustris, G.P.; Tzafestas, S.G. Switching fuzzy tracking control for mobile robots under curvature constraints. Control Eng. Pract. 2011, 19, 45–53. [Google Scholar] [CrossRef]
- Kareem Jaradat, M.A.; Al-Rousan, M.; Quadan, L. Reinforcement based mobile robot navigation in dynamic environment. Robot. Comput. Integr. Manuf. 2011, 27, 135–149. [Google Scholar] [CrossRef]
- Castillo, O.; Neyoy, H.; Soria, J.; Melin, P.; Valdez, F. A new approach for dynamic fuzzy logic parameter tuning in Ant Colony Optimization and its application in fuzzy control of a mobile robot. Appl. Soft Comput. 2015, 28, 150–159. [Google Scholar] [CrossRef]
- Lin, K.-P.; Hung, K.-C. An efficient fuzzy weighted average algorithm for the military UAV selecting under group decision-making. Knowl.-Based Syst. 2011, 24, 877–889. [Google Scholar] [CrossRef]
- Ibraheem, I.K.; Ajeil, F.H. Path Planning of an autonomous Mobile Robot using Swarm Based Optimization Techniques. Al-Khwarizmi Eng. J. 2016, 12, 12–25. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Sahib, M.A.; Humaidi, A.J. Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm. Appl. Soft Comput. 2020, 89, 106076. [Google Scholar] [CrossRef] [Green Version]
- Ajeil, F.H.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments. Sensors 2020, 20, 1880. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ajeil, F.H.; Ibraheem, I.K.; Humaidi, A.J.; Khan, Z.H. A novel path planning algorithm for mobile robot in dynamic environments using modified bat swarm optimization. J. Eng. 2021, 2021, 37–48. [Google Scholar] [CrossRef]
- Ulutaş, A.; Stanujkic, D.; Karabasevic, D.; Popovic, G.; Zavadskas, E.K.; Smarandache, F.; Brauers, W.K. Developing of a Novel Integrated MCDM MULTIMOOSRAL Approach for Supplier Selection. Informatica 2021, 32, 145–161. [Google Scholar] [CrossRef]
- Bausys, R.; Cavallaro, F.; Semenas, R. Application of Sustainability Principles for Harsh Environment Exploration by Autonomous Robot. Sustainability 2019, 11, 2518. [Google Scholar] [CrossRef] [Green Version]
- Karaşan, A.; Kahraman, C. Selection of the Most Appropriate Renewable Energy Alternatives by Using a Novel Interval-Valued Neutrosophic ELECTRE I Method. Informatica 2020, 31, 225–248. [Google Scholar] [CrossRef] [Green Version]
- Yazdani, M.; Wen, Z.; Liao, H.; Banaitis, A.; Turskis, Z. A grey combined compromise solution (CoCoSo-G) method for supplier selection in construction management. J. Civ. Eng. Manag. 2019, 25, 858–874. [Google Scholar] [CrossRef] [Green Version]
- Ulutaş, A.; Karabasevic, D.; Popovic, G.; Stanujkic, D.; Nguyen, P.T.; Karaköy, Ç. Development of a Novel Integrated CCSD-ITARA-MARCOS Decision-Making Approach for Stackers Selection in a Logistics System. Mathematics 2020, 8, 1672. [Google Scholar] [CrossRef]
- Wang, S.; Wei, G.; Lu, J.; Wu, J.; Wei, C.; Chen, X. GRP and CRITIC method for probabilistic uncertain linguistic MAGDM and its application to site selection of hospital constructions. Soft Comput. 2021, 15p. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Atanassov, K.T. Intuitionistic fuzzy sets. Fuzzy Sets Syst. 1986, 20, 87–96. [Google Scholar] [CrossRef]
- Garg, H.; Rani, D. An efficient intuitionistic fuzzy MULTIMOORA approach based on novel aggregation operators for the assessment of solid waste management techniques. Appl Intell. 2021, 34. [Google Scholar] [CrossRef]
- Yager, R.R. Generalized Orthopair Fuzzy Sets. IEEE Trans. Fuzzy Syst. 2017, 25, 1222–1230. [Google Scholar] [CrossRef]
- Smarandache, F. Neutrosophic Set is a Generalization of Intuitionistic Fuzzy Set, Inconsistent Intuitionistic Fuzzy Set (Picture Fuzzy Set, Ternary Fuzzy Set), Pythagorean Fuzzy Set (Atanassov’s Intuitionistic Fuzzy Set of second type), q-Rung Orthopair Fuzzy Set, Spherical Fuzzy Set, and n-HyperSpherical Fuzzy Set, while Neutrosophication is a Generalization of Regret Theory. Grey System Theory, and Three-Ways Decision (revisited). J. New Theory 2019, 29, 1–35. [Google Scholar]
- Zavadskas, E.K.; Bausys, R.; Lescauskiene, I.; Omran, J. M-generalised q-neutrosophic MULTIMOORA for Decision Making. Stud. Inform. Control 2020, 29, 389–398. [Google Scholar] [CrossRef]
- Bausys, R.; Lescauskienė, I.; Semenas, R. Participant trustworthiness analysis in the game-based urban planning processes by PROMETHEE-mGqNN approach. J. Civ. Eng. Manag. 2021, 27, 427–440. [Google Scholar] [CrossRef]
- Semenas, R.; Bausys, R.; Zavadskas, E.K. A Novel Environment Exploration Strategy by m-generalised q-neutrosophic WASPAS. Stud. Inform. Control 2021, 30, 19–28. [Google Scholar] [CrossRef]
- Portugal, D.; Rocha, R.P. Multi-robot patrolling algorithms: Examining performance and scalability. Adv. Robot. 2013, 27, 325–336. [Google Scholar] [CrossRef]
- Roa-Borbolla, A.G.; Marin-Hernandez, A.; Rechy-Ramirez, E.J.; Vazquez-Leal, H. Priority exploration by mobile robots for search and rescue situations. In Proceedings of the 2017 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 8–10 November 2017; pp. 1–6. [Google Scholar]
- Juliá, M.; Gil, A.; Reinoso, O. A comparison of path planning strategies for autonomous exploration and mapping of unknown environments. Auton. Robots 2012, 33, 427–444. [Google Scholar] [CrossRef]
- Saha, A.; Smarandache, F.; Baidya, J.; Dutta, D. MADM Using m-Generalized q-Neutrosophic Sets. Neutrosophic Sets Syst. 2020, 35, 252–268. [Google Scholar]
- Zavadskas, E.K.; Bausys, R.; Juodagalviene, B.; Garnyte-Sapranaviciene, I. Model for residential house element and material selection by neutrosophic MULTIMOORA method. Eng. Appl. Artif. Intell. 2017, 64, 315–324. [Google Scholar] [CrossRef] [Green Version]
- Menendez, E.; Victores, J.G.; Montero, R.; Martínez, S.; Balaguer, C. Tunnel structural inspection and assessment using an autonomous robotic system. Autom. Constr. 2018, 87, 117–126. [Google Scholar] [CrossRef]
- Chandrawati, T.B.; Ratna, A.A.P.; Sari, R.F. Path Selection using Fuzzy Weight Aggregated Sum Product Assessment. Int. J. Comput. Commun. Control 2020, 15, 1–19. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criterion | Name | Optimum | Weight |
|---|---|---|---|
| The total number of workers at the planned route. | Min | 0.35 | |
| The sum of node priority. | Max | 0.18 | |
| The sum of node idleness. | Min | 0.15 | |
| The ratio between the assessed route length and the shortest possible route. | Min | 0.23 | |
| The number of charging stations along the planned route. | Max | 0.09 |
| R | ||
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| 11 | ||
| 12 | ||
| 13 | ||
| 14 | ||
| 15 | ||
| 16 | ||
| 17 | ||
| 18 | ||
| 19 |
| R | |||||
|---|---|---|---|---|---|
| 2 | 1.5 | 0 | 1 | 0 | |
| 2 | 1.6 | 0 | 1.539 | 0 | |
| 1 | 0.8 | 0 | 1 | 1 | |
| 2 | 2.1 | 0 | 1.998 | 1 | |
| 1 | 1.4 | 0 | 1.954 | 1 | |
| 2 | 2.1 | 0 | 2.179 | 1 | |
| 1 | 1.5 | 0 | 1.408 | 0 | |
| 3 | 2.7 | 0 | 2.361 | 1 | |
| 2 | 2 | 0 | 2.359 | 2 | |
| 3 | 2.7 | 0 | 2.584 | 2 | |
| 2 | 2.1 | 0 | 1.813 | 1 | |
| 5 | 2.7 | 0 | 3.048 | 1 | |
| 4 | 2 | 0 | 3.045 | 2 | |
| 5 | 2.7 | 0 | 3.271 | 2 | |
| 4 | 2.1 | 0 | 2.499 | 1 | |
| 5 | 2.2 | 0 | 2.602 | 1 | |
| 4 | 1.5 | 0 | 2.6 | 2 | |
| 5 | 2.2 | 0 | 2.825 | 2 | |
| 4 | 1.6 | 0 | 2.054 | 1 |
| R | |||||
|---|---|---|---|---|---|
| 2 | 1.3 | 60 | 1 | 0 | |
| 2 | 1.9 | 120 | 1.998 | 0 | |
| 5 | 2.5 | 150 | 3.048 | 1 | |
| 3 | 2.5 | 150 | 2.361 | 1 | |
| 5 | 2 | 130 | 2.602 | 1 | |
| 2 | 1.4 | 100 | 1.539 | 0 | |
| 1 | 1.3 | 120 | 1.408 | 0 | |
| 4 | 1.9 | 150 | 2.499 | 1 | |
| 2 | 1.9 | 150 | 1.813 | 1 | |
| 4 | 1.4 | 130 | 2.054 | 1 | |
| 1 | 0.6 | 10 | 1 | 1 | |
| 2 | 1.9 | 120 | 2.179 | 1 | |
| 5 | 2.5 | 150 | 3.271 | 2 | |
| 3 | 2.5 | 150 | 2.584 | 2 | |
| 5 | 2 | 130 | 2.825 | 2 | |
| 1 | 1.2 | 70 | 1.954 | 1 | |
| 4 | 1.8 | 100 | 3.045 | 2 | |
| 2 | 1.8 | 100 | 2.359 | 2 | |
| 4 | 1.3 | 80 | 2.6 | 2 |
| Rank | Rank | ||
|---|---|---|---|
| 0.00146 | 10 | 0.0021 | 6 |
| 0.0018 | 7 | 0.005 | 3 |
| 0.0006 | 11 | −0.0003 | 15 |
| 0.00147 | 9 | 0.0002 | 10 |
| 0.002 | 6 | −0.0197 | 19 |
| 0.0318 | 3 | 0.0018 | 7 |
| 0.0015 | 8 | 0.0009 | 8 |
| 0.045 | 2 | −0.0152 | 18 |
| 0.0069 | 4 | 0.0003 | 9 |
| 0.0063 | 5 | −0.0019 | 16 |
| 0.061 | 1 | 0.0024 | 5 |
| −0.00002 | 13 | 0.0223 | 2 |
| −0.0042 | 17 | −0.00002 | 13 |
| −0 | 12 | 0.0001 | 11 |
| −0.0086 | 18 | −0.0023 | 17 |
| −0.0201 | 19 | 0.0031 | 4 |
| −0.0022 | 14 | −0.0001 | 14 |
| −0.0023 | 15 | 0.0524 | 1 |
| −0.0035 | 16 | −0 | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bausys, R.; Zavadskas, E.K.; Semenas, R. Path Selection for the Inspection Robot by m-Generalized q-Neutrosophic PROMETHEE Approach. Energies 2022, 15, 223. https://doi.org/10.3390/en15010223
Bausys R, Zavadskas EK, Semenas R. Path Selection for the Inspection Robot by m-Generalized q-Neutrosophic PROMETHEE Approach. Energies. 2022; 15(1):223. https://doi.org/10.3390/en15010223
Chicago/Turabian StyleBausys, Romualdas, Edmundas Kazimieras Zavadskas, and Rokas Semenas. 2022. "Path Selection for the Inspection Robot by m-Generalized q-Neutrosophic PROMETHEE Approach" Energies 15, no. 1: 223. https://doi.org/10.3390/en15010223
APA StyleBausys, R., Zavadskas, E. K., & Semenas, R. (2022). Path Selection for the Inspection Robot by m-Generalized q-Neutrosophic PROMETHEE Approach. Energies, 15(1), 223. https://doi.org/10.3390/en15010223