
In-Depth Assessment and Optimized Actuation Method of a Novel Solar-Driven Thermomechanical Actuator via Shape Memory Alloy




Abstract
:1. Introduction
2. Materials and Methods
2.1. Solar-Driven Thermomechanical SMA Actuator Design
2.2. Solar-Driven Thermomechanical SMA Actuator Fabrication
2.3. Force and Displacement Assessment Platform
2.3.1. Mechanical Setup for the Assessment Platform
2.3.2. Electrical Setup
2.3.3. Experimental Criteria
2.3.4. Software Setup
3. Results and Discussion
3.1. Force and Displacement Assessment
3.1.1. Force Analysis
3.1.2. Displacement Assessment
3.2. Thermomechanical SMA Actuator
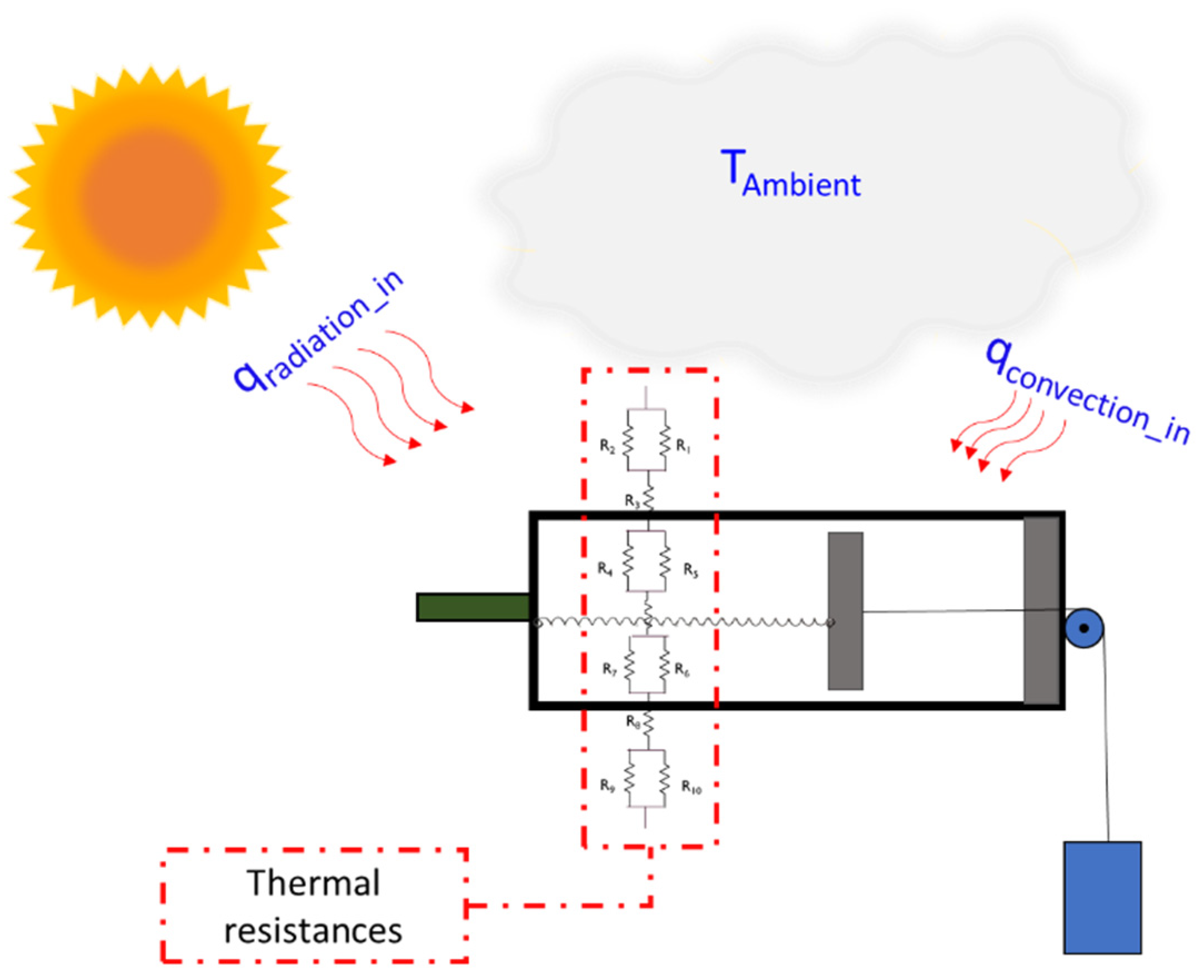
3.2.1. Analytical-Based Model
3.2.2. Numerical-Based Result
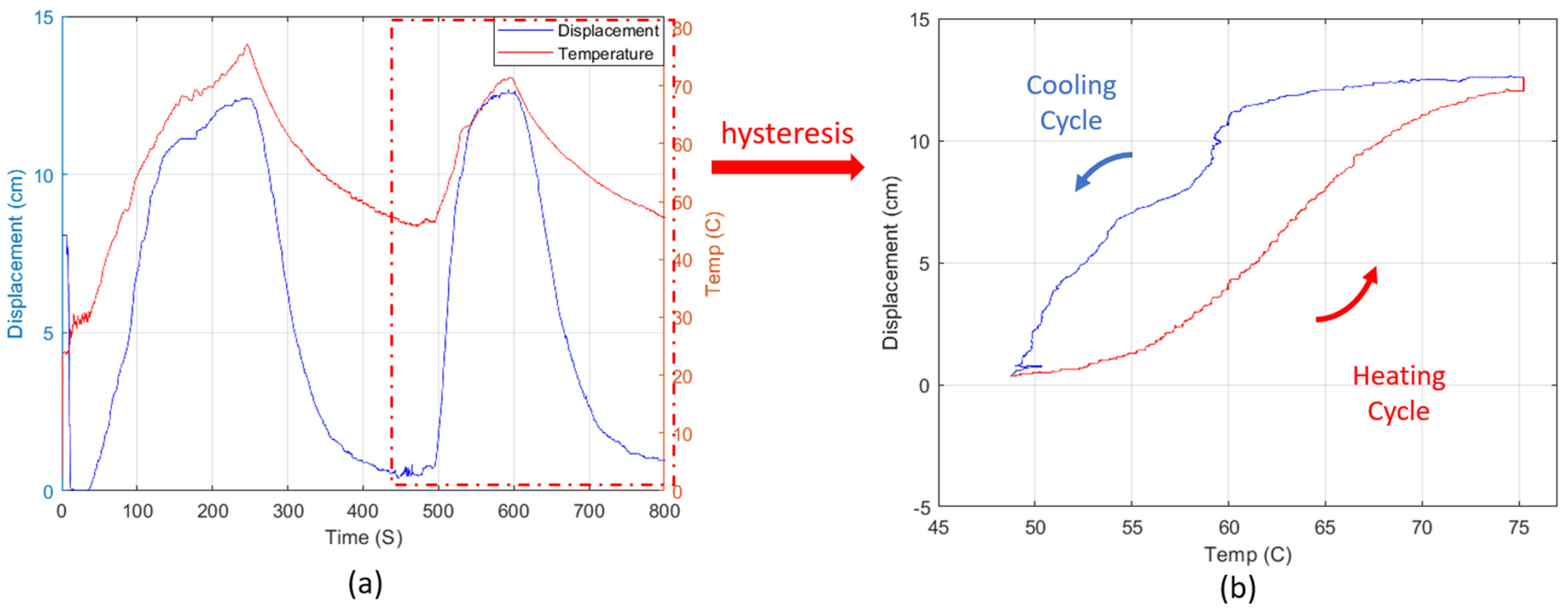
3.2.3. Experimental-Based Result
4. Conclusions and Future Work
- The numerical simulation showed that the maximum, minimum, mean, median, range, and standard deviation temperatures were 62.1, 13.5 39.7, 40.0, 48.5, and 10.8 °C, respectively, throughout the year.
- The numerical simulation also showed that most of the days have temperature variations of 19 °C, which means that the activation and deactivation would occur smoothly. Additionally, it can also be observed that minimum days have a temperature variation of 14 °C, which is also acceptable for activation and deactivation of the actuator.
- The experimental results showed that the push and pull force of the actuation mechanism was 152.3 and 151.1 N, respectively, where the forces exceeded the anticipated force by 21.23% and 17.62%, accordingly.
- The experimental results showed that the displacement of the actuation mechanism was 127 mm, where the displacement fell behind the anticipated displacement by 2.31%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| MENA | Middle East and North Africa |
| SMA | Shape Memory Alloy |
| SHC | Solar Heat Collector |
| KSA | Kingdom of Saudi Arabia |
| PV | Photovoltaic |
| PVT | Photovoltaic Thermal |
| SME | Shape Memory Effect |
| NiTiNOL | Nickel -Titanium-based alloy |
| FPC | Flat Plate Collector |
| CAD | Computer-aided Design |
| 1D | one-dimensional |
| 3D | three-dimensional |
| CFD | Computational Fluid Dynamics |
| As | Austenite starting temperature |
| Af | Austenite finish temperature |
| Ms | Martensite start temperature |
| Mf | Martensite finish temperature |
| Max | Maximum |
| Min | Minimum |
| Symbols | |
| F | Force |
| SCCN | Spring’ constants |
| FHN | force hot NiTiNOL springs |
| FBias | Force Bias load |
| FCN | Force cold NiTiNOL |
| q | Amount of heat transferred (W/m2) |
| T | Temperature (OC) |
| R | Thermal resistance (OC /W) |
| L | Distance (m) |
| K | Thermal conductivity (W/(m⋅K)) |
| h | Heat transfer coefficient (W/(m²·K)) |
| Subscript | |
| conv | Convection |
| rad | Radiation |
| amb | Ambient |
| G | Glass |
| SMA | Shape Memory Alloy |
| In | Input |
| Out | Output |
References
- Soummane, S.; Ghersi, F. Projecting Saudi sectoral electricity demand in 2030 using a computable general equilibrium model. Energy Strat. Rev. 2022, 39, 100787. [Google Scholar] [CrossRef]
- Collins, L. ‘We Will Be Pioneering’: Saudi Arabia Reveals 50% Renewables Goal by 2030, but Is that Realistic? Available online: https://www.rechargenews.com/energy-transition/we-will-be-pioneering-saudi-arabia-reveals-50-renewables-goal-by-2030-but-is-that-realistic-/2-1-954094 (accessed on 2 April 2022).
- Almadani, I.K.; Osman, I.S.; Hariri, N.G.; Saleem, M.; Hassanain, N.A. Investigating the Effects of Solar Tracking Systems on Thermal Profile of Photovoltaic Modules. Int. J. Renew. Energy Res. 2021, 11, 1561–1569. [Google Scholar] [CrossRef]
- Al Zohbi, G.; AlAmri, F.G. Current situation of renewable energy in Saudi Arabia: Opportunities and challenges. J. Sustain. Dev. 2020, 13, 98. [Google Scholar] [CrossRef]
- Wu, X.; Guo, J.; Ji, X.; Chen, G. Energy use in world economy from household-consumption-based perspective. Energy Policy 2019, 127, 287–298. [Google Scholar] [CrossRef]
- Amran, Y.A.; Amran, Y.M.; Alyousef, R.; Alabduljabbar, H. Renewable and sustainable energy production in Saudi Arabia according to Saudi Vision 2030; Current status and future prospects. J. Clean. Prod. 2020, 247, 119602. [Google Scholar] [CrossRef]
- Kannan, N.; Vakeesan, D. Solar energy for future world—A review. Renew. Sustain. Energy Rev. 2016, 62, 1092–1105. [Google Scholar] [CrossRef]
- Seme, S.; Štumberger, B.; Hadžiselimović, M.; Sredenšek, K. Solar photovoltaic tracking systems for electricity generation: A review. Energies 2020, 13, 4224. [Google Scholar] [CrossRef]
- Hariri, N.G.; AlMutawa, M.A.; Osman, I.S.; AlMadani, I.K.; Almahdi, A.M.; Ali, S. Experimental Investigation of Azimuth- and Sensor-Based Control Strategies for a PV Solar Tracking Application. Appl. Sci. 2022, 12, 4758. [Google Scholar] [CrossRef]
- Soumya, C.; Deepanraj, B.; Ranjitha, J. A review on solar photovoltaic systems and its application in electricity generation. AIP Conf. Proc. 2021, 2396, 020011. [Google Scholar]
- Ahmed, F.E.; Hashaikeh, R.; Hilal, N. Solar powered desalination–Technology, energy and future outlook. Desalination 2019, 453, 54–76. [Google Scholar] [CrossRef] [Green Version]
- Dincer, I.; Dost, S. A perspective on thermal energy storage systems for solar energy applications. Int. J. Energy Res. 1996, 20, 547–557. [Google Scholar] [CrossRef]
- Cheng, L. A Study of Small Solar Thermal Power Generation Device Based on Shape Memory Alloy. In Proceedings of the 2017 5th International Conference on Frontiers of Manufacturing Science and Measuring Technology (FMSMT 2017), Taiyuan, China, 24–25 June 2017; pp. 192–197. [Google Scholar]
- Ölander, A. An electrochemical investigation of solid cadmium-gold alloys. J. Am. Chem. Soc. 1932, 54, 3819–3833. [Google Scholar] [CrossRef]
- Dora, T.R.K.; Dora, N.; Srinivas, G.; Mazumdar, R. Thermal analysis and numerical simulation of Pulley-Belt driven type NiTiNOL heat engine. Therm. Sci. Eng. Prog. 2021, 21, 100757. [Google Scholar] [CrossRef]
- Vernon, L.B.; Vernon, H.M. Process of Manufacturing Articles of Thermoplastic Synthetic Resins. U.S. Patent 2,234,993, 18 March 1941. [Google Scholar]
- Huang, W. On the selection of shape memory alloys for actuators. Mater. Des. 2002, 23, 11–19. [Google Scholar] [CrossRef]
- Wongweerayoot, E.; Srituravanich, W.; Pimpin, A. Fabrication and characterization of nitinol-copper shape memory alloy bimorph actuators. J. Mater. Eng. Perform. 2015, 24, 635–643. [Google Scholar] [CrossRef]
- Yuan, H.; Fauroux, J.C.; Chapelle, F.; Balandraud, X. A review of rotary actuators based on shape memory alloys. J. Intell. Mater. Syst. Struct. 2017, 28, 1863–1885. [Google Scholar] [CrossRef] [Green Version]
- Yi, H. Simulation of shape memory alloy (SMA)-bias spring actuation for self-shaping architecture: Investigation of parametric sensitivity. Materials 2020, 13, 2485. [Google Scholar] [CrossRef] [PubMed]
- Rajagopalan, R.; Petruska, A.J.; Howard, D. A Bi-State Shape Memory Material Composite Soft Actuator. Actuators 2022, 11, 86. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Patra, S.; Sinha, S.; Chanda, A. Development and Finite Element Implementation of a Simple Constitutive Model to Address Superelasticity and Hysteresis of Nitinol. In Proceedings of the International Conference on Mechanical Engineering, Kolkata, India, 4–6 January 2018; pp. 171–187. [Google Scholar]
- Costanza, G.; Tata, M.E. Shape memory alloys for aerospace, recent developments, and new applications: A short review. Materials 2020, 13, 1856. [Google Scholar] [CrossRef] [Green Version]
- Kheirikhah, M.M.; Rabiee, S.; Edalat, M.E. A review of shape memory alloy actuators in robotics. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2010; pp. 206–217. [Google Scholar]
- Hu, K.; Rabenorosoa, K.; Ouisse, M. A Review of SMA-Based Actuators for Bidirectional Rotational Motion: Application to Origami Robots. Front. Robot. AI 2021, 8, 678486. [Google Scholar] [CrossRef] [PubMed]
- Nespoli, A.; Besseghini, S.; Pittaccio, S.; Villa, E.; Viscuso, S. The high potential of shape memory alloys in developing miniature mechanical devices: A review on shape memory alloy mini-actuators. Sens. Actuators A Phys. 2010, 158, 149–160. [Google Scholar] [CrossRef]
- Hariri, N.; Riofrio, J.; Shin, M. Experimental Study of Nitinol Wire Arrangements as Servo-Biomimetics for Facial Muscles. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 13–19 November 2015; p. V003T003A003. [Google Scholar]
- Cho, D.; Park, J.; Kim, J. Automatic actuation of the anti-freezing system using SMA coil springs. Metals 2021, 11, 1424. [Google Scholar] [CrossRef]
- Hariri, N. A Study of a Scissor-like Lift Manipulator for the Actuation Mechanism of a Self Cleaning System Using Shape Memory Alloy. In Proceedings of the 2021 6th International Conference on Smart and Sustainable Technologies (SpliTech), Bol and Split, Croatia, 8–11 September 2021; pp. 1–6. [Google Scholar]
- Riad, A.; Zohra, M.B.; Alhamany, A.; Mansouri, M. Bio-sun tracker engineering self-driven by thermo-mechanical actuator for photovoltaic solar systems. Case Stud. Therm. Eng. 2020, 21, 100709. [Google Scholar] [CrossRef]
- Doroudchi, A.; Zakerzadeh, M.R.; Baghani, M. Developing a fast response SMA-actuated rotary actuator: Modeling and experimental validation. Meccanica 2018, 53, 305–317. [Google Scholar] [CrossRef]
- Degeratu, S.; Rotaru, P.; Manolea, G.; Manolea, H.; Rotaru, A. Thermal characteristics of Ni–Ti SMA (shape memory alloy) actuators. J. Therm. Anal. 2009, 97, 695–700. [Google Scholar] [CrossRef]
- Song, S.-H.; Lee, J.-Y.; Rodrigue, H.; Choi, I.-S.; Kang, Y.J.; Ahn, S.-H. 35 Hz shape memory alloy actuator with bending-twisting mode. Sci. Rep. 2016, 6, 21118. [Google Scholar] [CrossRef]
- Dauksher, R.; Patterson, Z.; Majidi, C. Characterization and Analysis of a Flexural Shape Memory Alloy Actuator. Actuators 2021, 10, 202. [Google Scholar] [CrossRef]
- Zhang, C.; Yu, Y.; Wang, Y.; Zhou, M. Takagi–Sugeno Fuzzy Neural Network Hysteresis Modeling for Magnetic Shape Memory Alloy Actuator Based on Modified Bacteria Foraging Algorithm. Int. J. Fuzzy Syst. 2020, 22, 1314–1329. [Google Scholar] [CrossRef]
- Copaci, D.-S.; Blanco, D.; Martin-Clemente, A.; Moreno, L. Flexible shape memory alloy actuators for soft robotics: Modelling and control. Int. J. Adv. Robot. Syst. 2020, 17. [Google Scholar] [CrossRef]
- Formentini, M.; Lenci, S. An innovative building envelope (kinetic façade) with Shape Memory Alloys used as actuators and sensors. Autom. Constr. 2018, 85, 220–231. [Google Scholar] [CrossRef]
- Hariri, N. A novel dust mitigation technology solution of a self-cleaning method for a PV module capable of harnessing reject heat using shape memory alloy. Case Stud. Therm. Eng. 2022, 32, 101894. [Google Scholar] [CrossRef]
- Suman, S.; Khan, M.K.; Pathak, M. Performance enhancement of solar collectors—A review. Renew. Sustain. Energy Rev. 2015, 49, 192–210. [Google Scholar] [CrossRef] [Green Version]
- Lupu, A.; Homutescu, V.; Balanescu, D.; Popescu, A. Efficiency of solar collectors—A review. IOP Conf. Ser. Mater. Sci. Eng. 2018, 444, 082015. [Google Scholar] [CrossRef]
- Tian, Y.; Zhao, C. A review of solar collectors and thermal energy storage in solar thermal applications. Appl. Energy 2012, 104, 538–553. [Google Scholar] [CrossRef] [Green Version]
- Marčič, S.; Kovačič-Lukman, R.; Virtič, P. Hybrid system solar collectors-heat pumps for domestic water heating. Therm. Sci. 2019, 23, 3675–3685. [Google Scholar] [CrossRef]
- Oztop, H.F.; Bayrak, F.; Hepbasli, A. Energetic and exergetic aspects of solar air heating (solar collector) systems. Renew. Sustain. Energy Rev. 2013, 21, 59–83. [Google Scholar] [CrossRef]
- Ahmad, S.H.A.; Saidur, R.; Mahbubul, I.; Al-Sulaiman, F. Optical properties of various nanofluids used in solar collector: A review. Renew. Sustain. Energy Rev. 2017, 73, 1014–1030. [Google Scholar] [CrossRef]
- Lamrani, B.; Kuznik, F.; Draoui, A. Thermal performance of a coupled solar parabolic trough collector latent heat storage unit for solar water heating in large buildings. Renew. Energy 2020, 162, 411–426. [Google Scholar] [CrossRef]
- Chen, C.; Diao, Y.; Zhao, Y.; Wang, Z.; Liang, L.; Wang, T.; Zhu, T.; Ma, C. Thermal performance of a closed collector–storage solar air heating system with latent thermal storage: An experimental study. Energy 2020, 202, 117764. [Google Scholar] [CrossRef]
- Mehrpooya, M.; Hemmatabady, H.; Ahmadi, M.H. Optimization of performance of Combined Solar Collector-Geothermal Heat Pump Systems to supply thermal load needed for heating greenhouses. Energy Convers. Manag. 2015, 97, 382–392. [Google Scholar] [CrossRef]
- Osman, I.S.; Hariri, N.G. Thermal Investigation and Optimized Design of a Novel Solar Self-Driven Thermomechanical Actuator. Sustainability 2022, 14, 5078. [Google Scholar] [CrossRef]
- Alqurashi, M.M.; Altuwirqi, R.M.; Ganash, E.A.; Umar, A. Thermal Profile of a Low-Concentrator Photovoltaic: A COMSOL Simulation. Int. J. Photoenergy 2020, 2020, 8814572. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Command | Rising Time (s) | Overshoot (%) | Peak Time (s) | Settling Time (s) |
|---|---|---|---|---|
| 300 | 2.7 | 7 | 2.91 | 5.6 |
| 600 | 3.92 | 5.6 | 4.2 | 7.3 |
| 900 | 5.12 | 3.5 | 5.32 | 7.7 |
| 1200 | 6.83 | 1.2 | 7 | 9.5 |
| 1500 | 8.9 | 0.7 | 9 | 11.5 |
| Fstroke | Weight of Bias Load for a Single Stoke (kg) | Weight of Bias Load for FCN (kg) | Total Weight of Bias Load (kg) | Fbias | Fbias + Fstroke | Number of NiTi Springs Required |
|---|---|---|---|---|---|---|
| 130 N | 13 | 15 | 28 | 274.7 N | 404.7 N | 28 |
| Command | Rising Time (s) | Overshoot (%) | Peak Time (s) | Settling Time (s) |
|---|---|---|---|---|
| 15 | 4.2 | 6 | 4.7 | 7.5 |
| 30 | 2.3 | 0 | 2.3 | 8.3 |
| 45 | 2.4 | 0 | 4.2 | 4.2 |
| 60 | 2.9 | 0 | 5.5 | 5.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almadani, I.K.; Osman, I.S.; Hariri, N.G. In-Depth Assessment and Optimized Actuation Method of a Novel Solar-Driven Thermomechanical Actuator via Shape Memory Alloy. Energies 2022, 15, 3807. https://doi.org/10.3390/en15103807
Almadani IK, Osman IS, Hariri NG. In-Depth Assessment and Optimized Actuation Method of a Novel Solar-Driven Thermomechanical Actuator via Shape Memory Alloy. Energies. 2022; 15(10):3807. https://doi.org/10.3390/en15103807
Chicago/Turabian StyleAlmadani, Ibrahim Khalil, Ibrahim Sufian Osman, and Nasir Ghazi Hariri. 2022. "In-Depth Assessment and Optimized Actuation Method of a Novel Solar-Driven Thermomechanical Actuator via Shape Memory Alloy" Energies 15, no. 10: 3807. https://doi.org/10.3390/en15103807