
Frequency Stabilization of AC Microgrid Clusters: An Efficient Fractional Order Supercapacitor Controller Approach

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
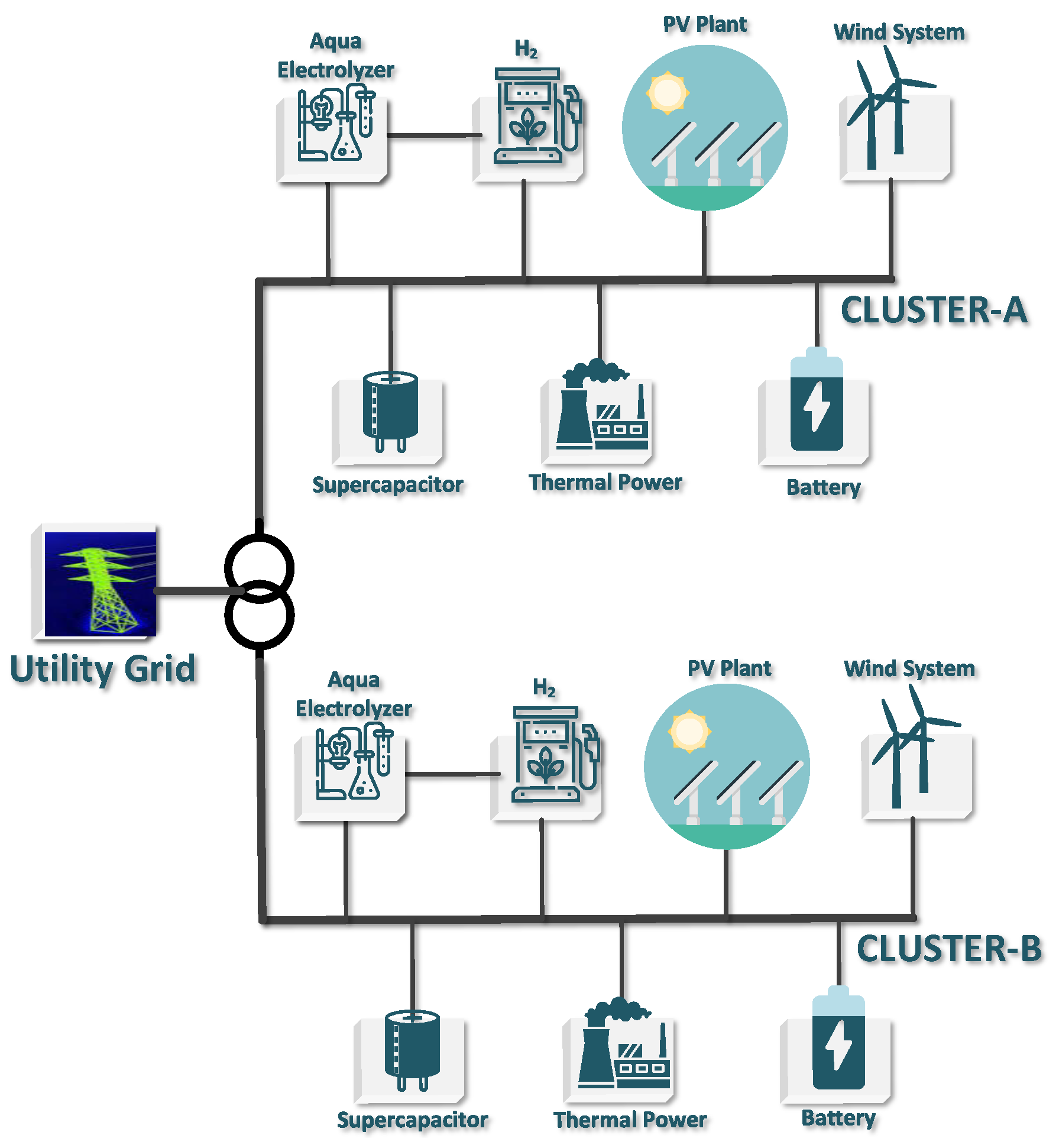
2. Conceptual Microgrid Cluster with Renewable Energy
- Direct solar irradiance conversion efficiency
- Total area of the panels
- Irradiation of the sun
- Weather temperature
3. Small Signal Modeling of Microgrid Clusters
3.1. Aqua Electrolysers
3.2. Diesel Engines
3.3. Batteries
3.4. Fuel Cells
3.5. Wind Power
3.6. Solar PV
3.7. Solar Thermal Power Plant
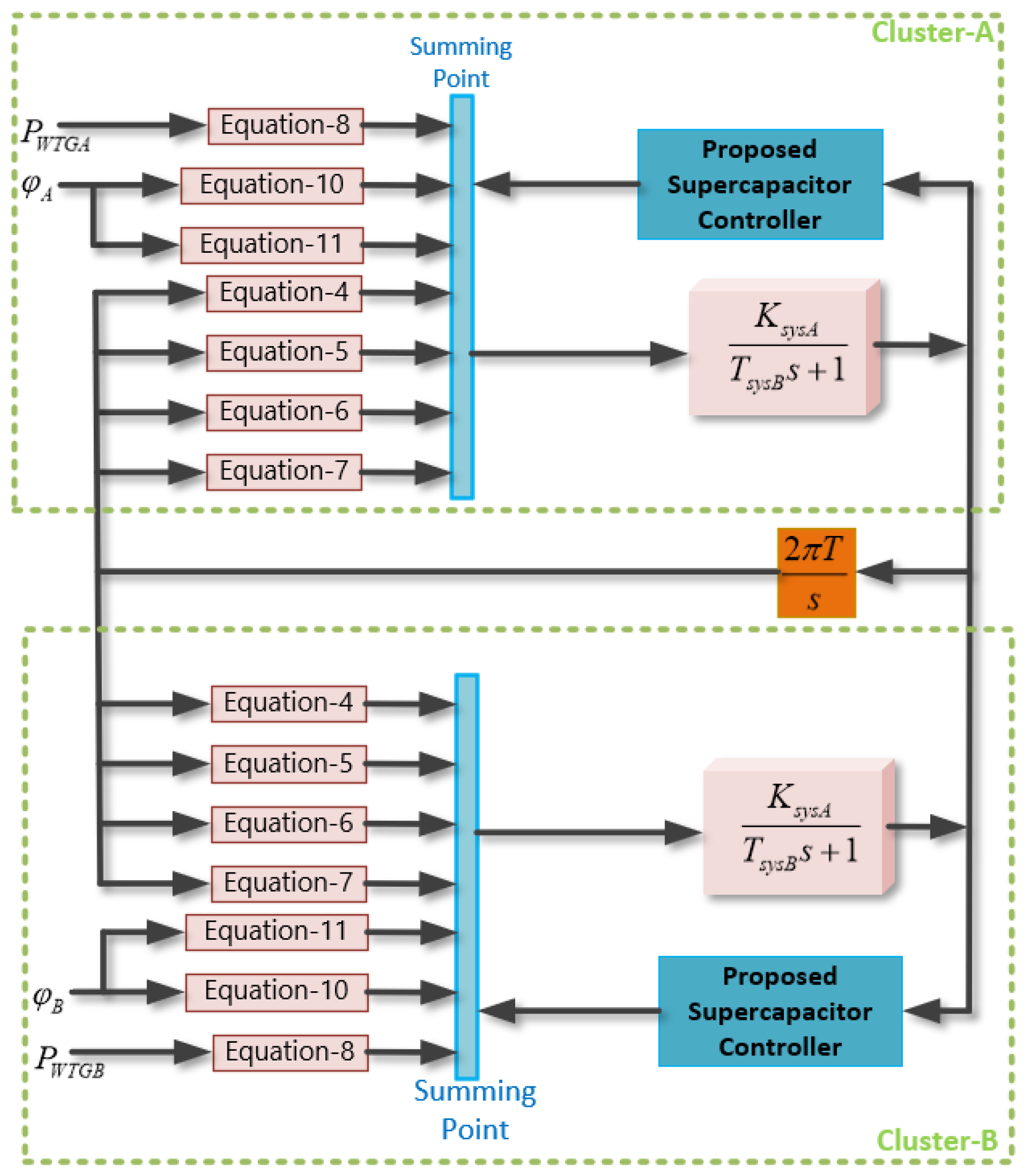
3.8. Integrated Small-Signal Modeling
4. Fractional Order Supercapacitor Controller
4.1. Supercapacitor
4.2. Controller Design
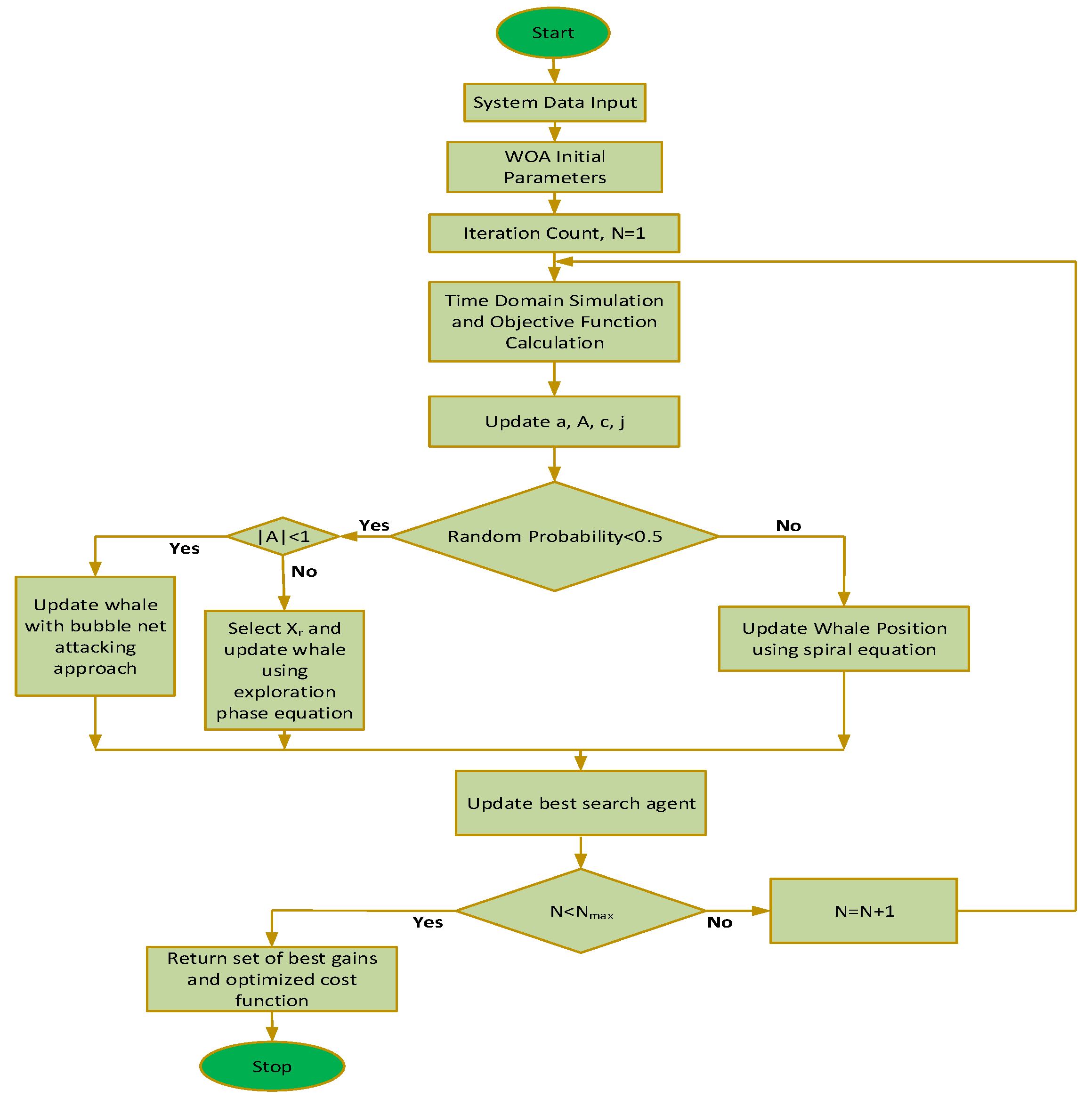
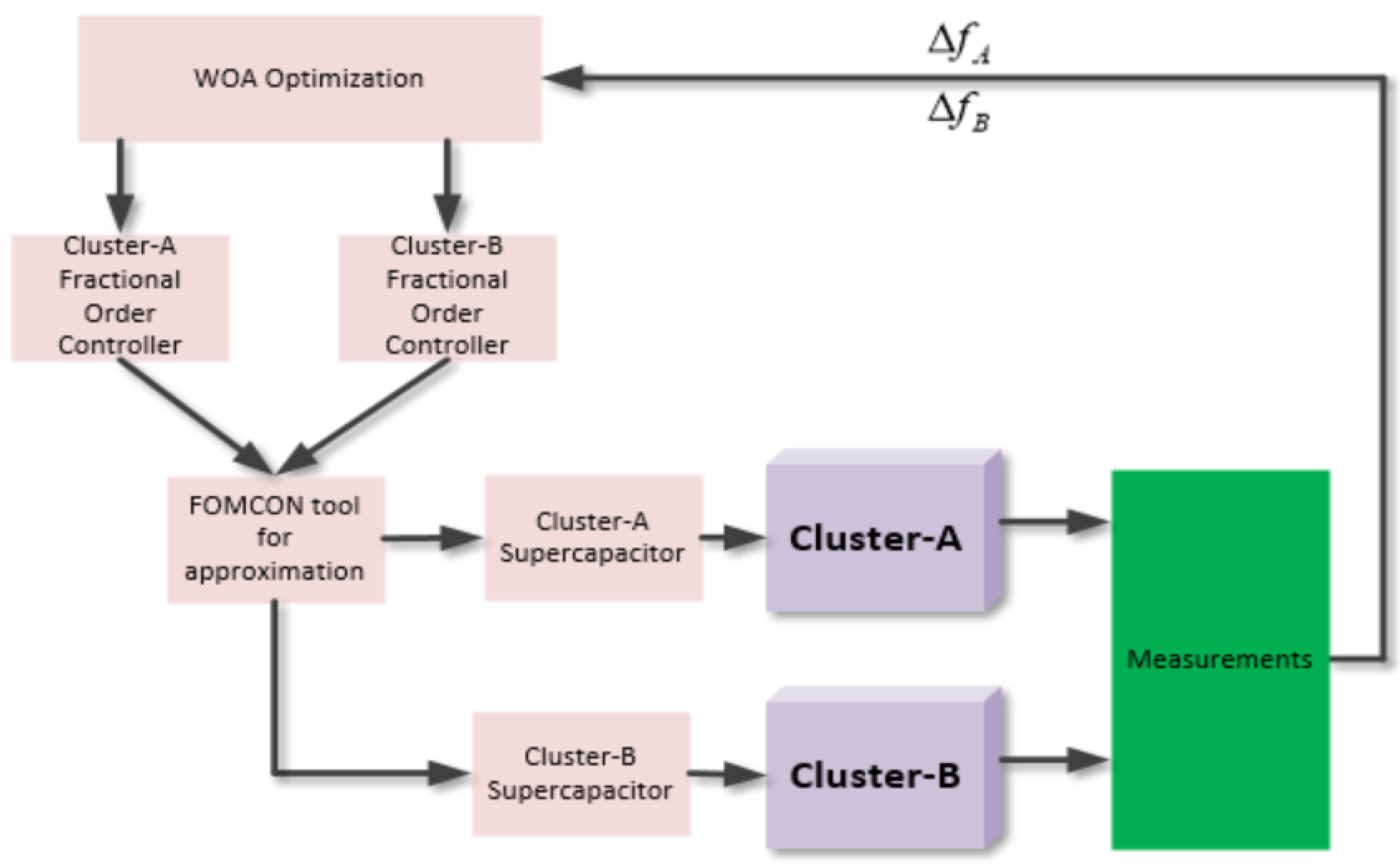
4.3. Controller Parameter Tuning Approach
- The adaptive exploration and exploitation mechanism of WOA guarantees the global solution
- Unlike traditional methods such as PSO, DE, and HS, WOA is not sensitive to the initial solution(s), which may have a significant impact on their convergence and performance
- It is easily applicable due to its gradient-free nature
- It is easy to implement and flexible, making it ideal for a wide range of problem types and environments
- Less time is required compared to many algorithms
- It is easy to use and provides accurate results
4.3.1. Prey Encirclement
4.3.2. Bubble-Net Feeding
4.3.3. Searching for Prey
4.3.4. Sensitivity and Stability Analysis of the Controller
5. Results and Discussion
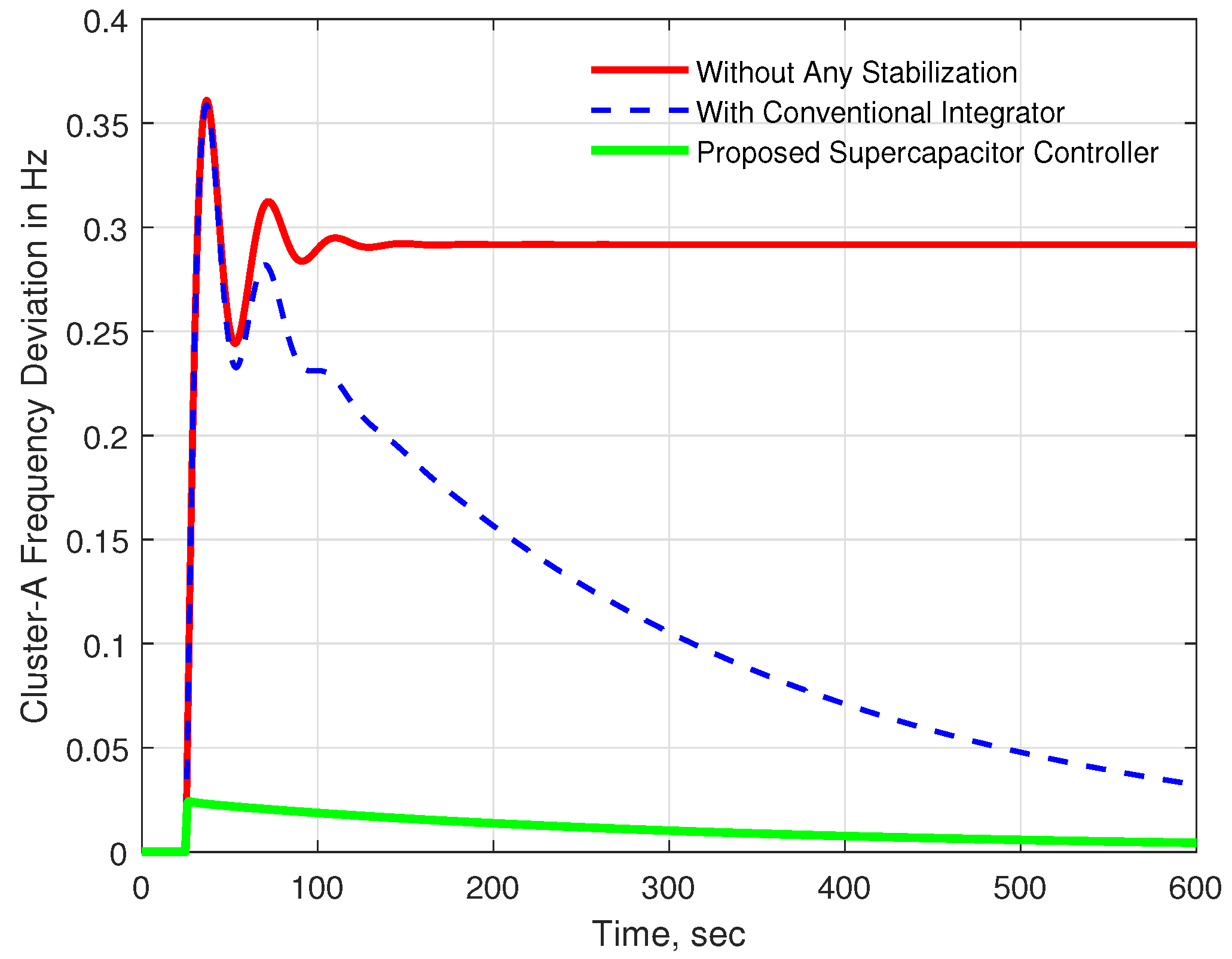
5.1. Cluster A Small Load Disturbances
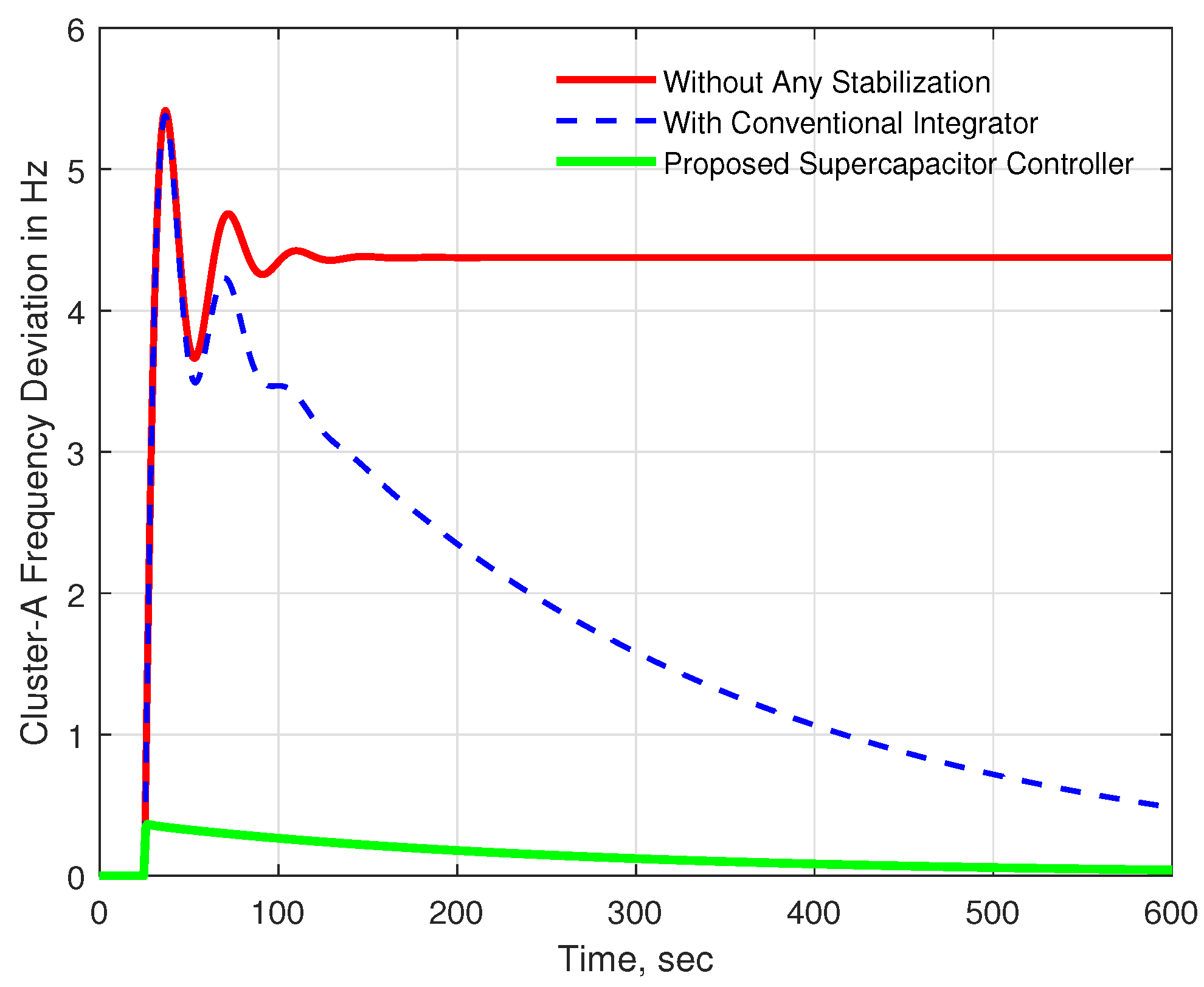
5.2. Cluster A Large Load Disturbances
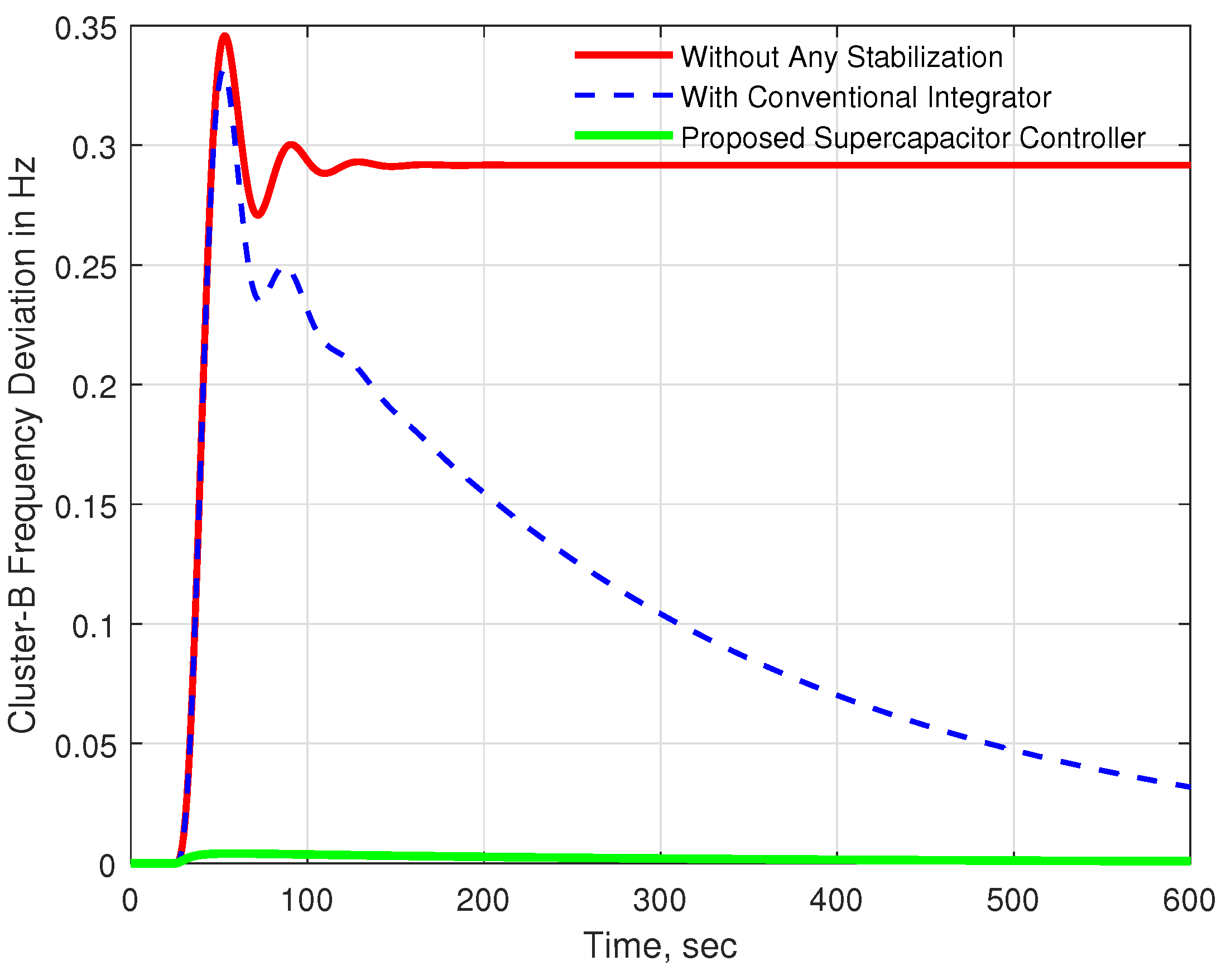
5.3. Cluster B Small Load Disturbances
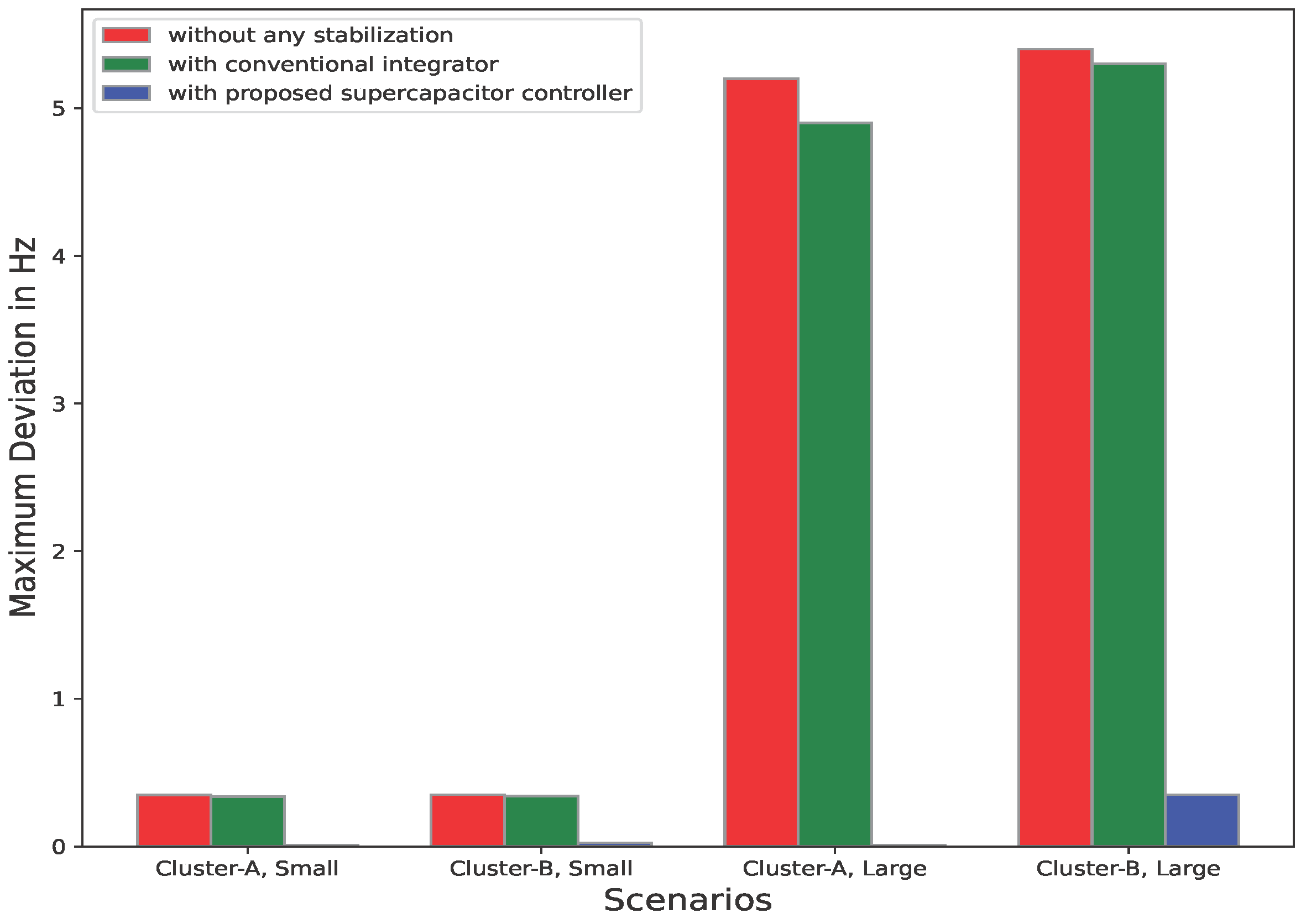
5.4. Comparison with Existing Approaches
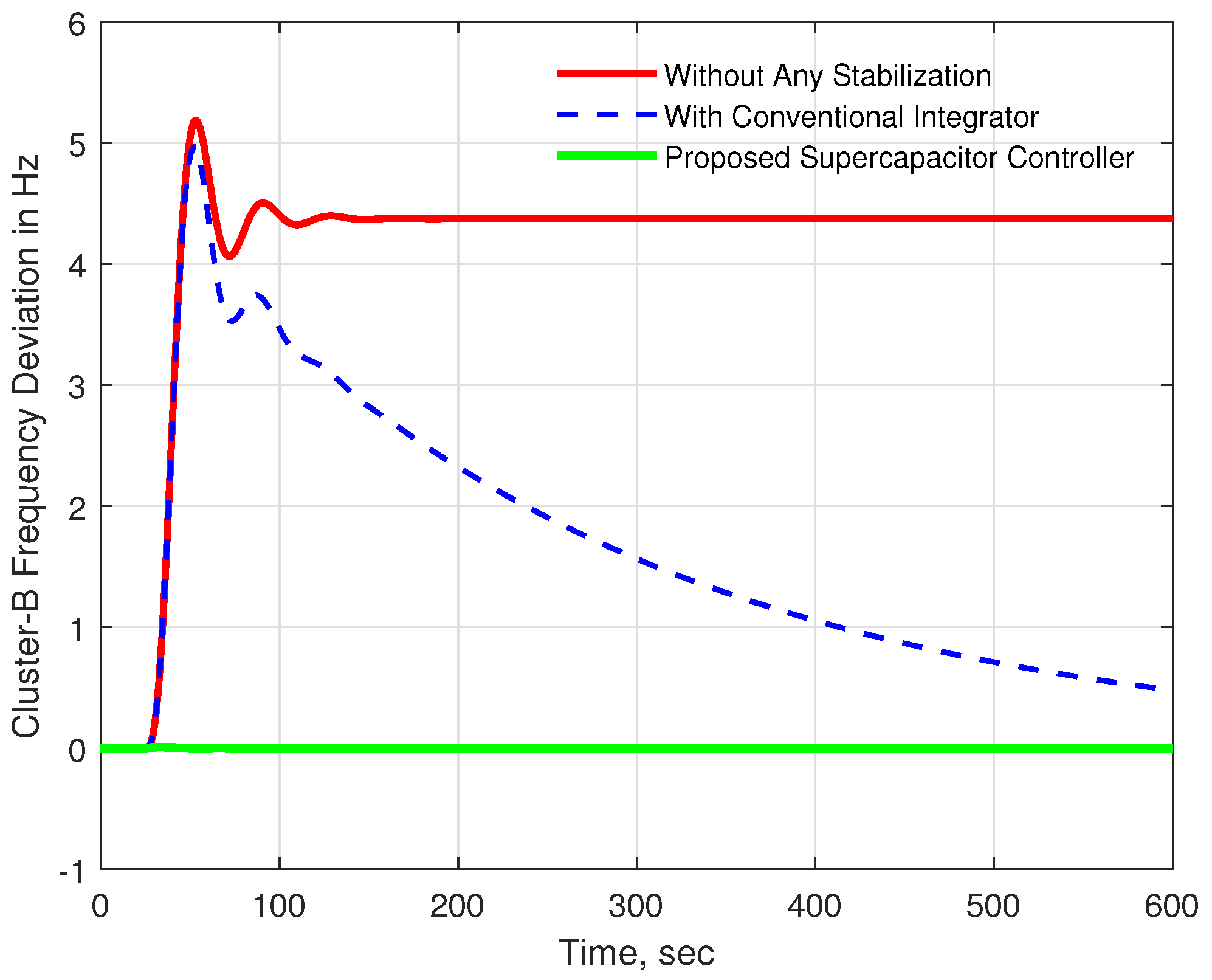
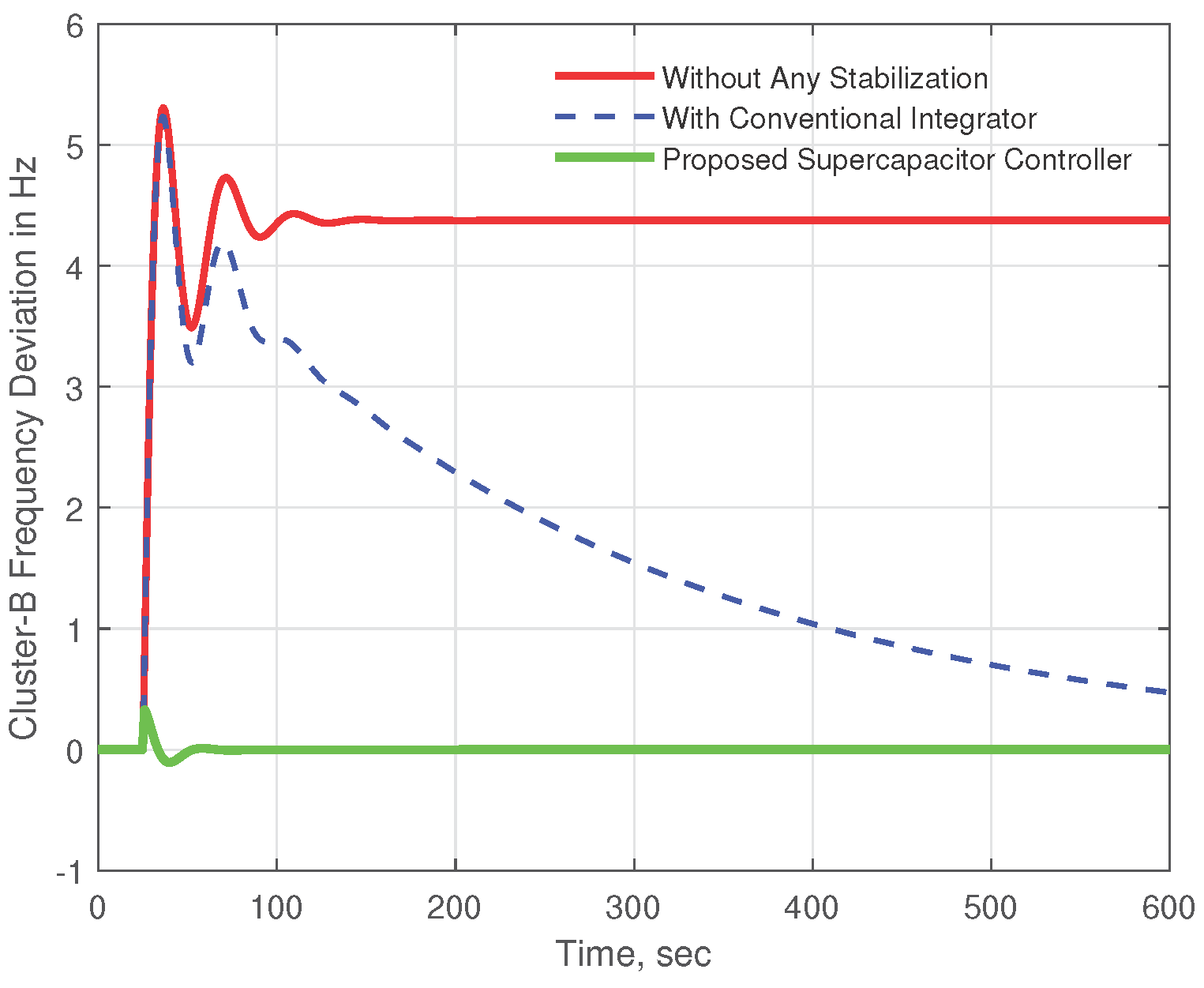
5.5. Cluster B Large Disturbance
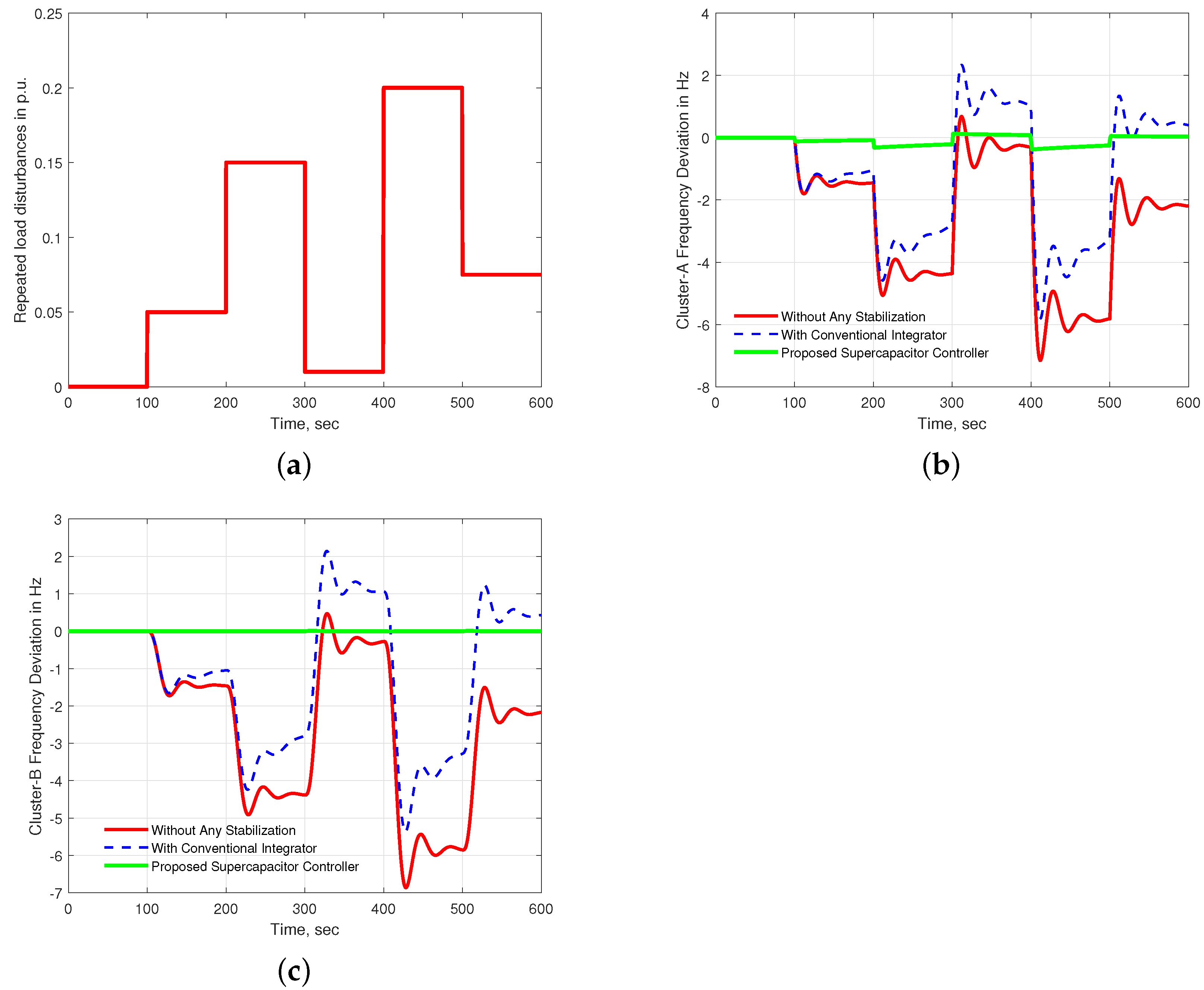
5.6. Repeated Load Disturbances
5.7. Renewable Energy Variation Disturbances
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alam, M.S.; Al-Ismail, F.S.; Salem, A.; Abido, M.A. High-Level Penetration of Renewable Energy Sources Into Grid Utility: Challenges and Solutions. IEEE Access 2020, 8, 190277–190299. [Google Scholar] [CrossRef]
- Khaki, B.; Kiliç, H.; Yilmaz, M.; Shafie-Khah, M.; Lotfi, M.; Catalão, J.P. Active Fault Tolerant Control of Grid-Connected DER: Diagnosis and Reconfiguration. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 4127–4132. [Google Scholar]
- Ali, A.O.; Elmarghany, M.R.; Abdelsalam, M.M.; Sabry, M.N.; Hamed, A.M. Closed-loop home energy management system with renewable energy sources in a smart grid: A comprehensive review. J. Energy Storage 2022, 50, 104609. [Google Scholar] [CrossRef]
- Alam, M.S.; Al-Ismail, F.S.; Abido, M.A. Power management and state of charge restoration of direct current microgrid with improved voltage-shifting controller. J. Energy Storage 2021, 44, 103253. [Google Scholar] [CrossRef]
- Saxena, P.; Singh, N.; Pandey, A.K. Enhancing the dynamic performance of microgrid using derivative controlled solar and energy storage based virtual inertia system. J. Energy Storage 2020, 31, 101613. [Google Scholar] [CrossRef]
- Ma, H.; Chowdhury, B. Working towards frequency regulation with wind plants: Combined control approaches. IET Renew. Power Gener. 2010, 4, 308–316. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T. A new intelligent online fuzzy tuning approach for multi-area load frequency control: Self Adaptive Modified Bat Algorithm. Int. J. Electr. Power Energy Syst. 2015, 71, 254–261. [Google Scholar] [CrossRef]
- Kiliç, H.; Khaki, B.; Gumuş, B.; Yilmaz, M.; Asker, M.E. Stability Analysis of Islanded Microgrid with EVs. In Proceedings of the 2018 Smart Grid Conference (SGC), Sanandaj, Iran, 28–29 November 2018; pp. 1–5. [Google Scholar]
- Rai, A.; Das, D.K. The development of a fuzzy tilt integral derivative controller based on the sailfish optimizer to solve load frequency control in a microgrid, incorporating energy storage systems. J. Energy Storage 2022, 48, 103887. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; ur Rehman, H.; Masood, A.; Rizvi, S.A.A.; Salman, S. Aggregated electric vehicle-to-grid for primary frequency control in a microgrid—A review. In Proceedings of the 2018 IEEE 2nd International Electrical and Energy Conference (CIEEC), Beijing, China, 4–7 November 2018; pp. 563–568. [Google Scholar]
- Iqbal, S.; Xin, A.; Jan, M.U.; Salman, S.; Zaki, A.U.M.; Rehman, H.U.; Shinwari, M.F.; Abdelbaky, M.A. V2G strategy for primary frequency control of an industrial microgrid considering the charging station operator. Electronics 2020, 9, 549. [Google Scholar] [CrossRef] [Green Version]
- Jan, M.U.; Xin, A.; Abdelbaky, M.A.; Rehman, H.U.; Iqbal, S. Adaptive and fuzzy PI controllers design for frequency regulation of isolated microgrid integrated with electric vehicles. IEEE Access 2020, 8, 87621–87632. [Google Scholar] [CrossRef]
- Kim, J.; Guerrero, J.M.; Rodriguez, P.; Teodorescu, R.; Nam, K. Mode adaptive droop control with virtual output impedances for an inverter-based flexible AC microgrid. IEEE Trans. Power Electron. 2010, 26, 689–701. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A. An adaptive feedforward compensation for stability enhancement in droop-controlled inverter-based microgrids. IEEE trans. Power Deliv. 2011, 26, 1764–1773. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, M.; Shahzad, S.; Muqeet, H.A.; Shahzad, M.; Hussain, M.M. Load Frequency Control (LFC) Strategies in Renewable Energy-Based Hybrid Power Systems: A Review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Ming, G.; Geng, J.; Liu, J.; Chen, Y.; Yuan, K.; Zhang, K. Load Frequency Robust Control Considering Intermittent Characteristics of Demand-Side Resources. Energies 2022, 15, 4370. [Google Scholar] [CrossRef]
- Buraimoh, E.; Aluko, A.O.; Oni, O.E.; Davidson, I.E. Decentralized Virtual Impedance-Conventional Droop Control for Power Sharing for Inverter-Based Distributed Energy Resources of a Microgrid. Energies 2022, 15, 4439. [Google Scholar] [CrossRef]
- Wang, S.; Lu, L.; Han, X.; Ouyang, M.; Feng, X. Virtual-battery based droop control and energy storage system size optimization of a DC microgrid for electric vehicle fast charging station. Appl. Energy 2020, 259, 114146. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Nguyen, P.L.; Ma, Z.; Sheng, W. Self-synchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2013, 29, 617–630. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.C. Small-signal modeling and parameters design for virtual synchronous generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Fathi, A.; Shafiee, Q.; Bevrani, H. Robust frequency control of microgrids using an extended virtual synchronous generator. IEEE Trans. Power Syst. 2018, 33, 6289–6297. [Google Scholar] [CrossRef]
- Tan, K.T.; Peng, X.; So, P.L.; Chu, Y.C.; Chen, M.Z. Centralized control for parallel operation of distributed generation inverters in microgrids. IEEE Trans. Smart Grid 2012, 3, 1977–1987. [Google Scholar] [CrossRef] [Green Version]
- Mehrizi-Sani, A.; Iravani, R. Potential-function based control of a microgrid in islanded and grid-connected modes. IEEE Trans. Power Syst. 2010, 25, 1883–1891. [Google Scholar] [CrossRef]
- Qian, T.; Liu, Y.; Zhang, W.; Tang, W.; Shahidehpour, M. Event-triggered updating method in centralized and distributed secondary controls for islanded microgrid restoration. IEEE Trans. Smart Grid 2019, 11, 1387–1395. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust frequency control in an islanded microgrid: H-infinity and mu-synthesis approaches. IEEE Trans. Smart Grid 2015, 7, 706–717. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids—A novel approach. IEEE Trans. Power Electron. 2013, 29, 1018–1031. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Stefanović, Č.; Dragičević, T.; Popovski, P.; Vasquez, J.C.; Guerrero, J.M. Robust networked control scheme for distributed secondary control of islanded microgrids. IEEE Trans. Ind. Electron. 2013, 61, 5363–5374. [Google Scholar] [CrossRef] [Green Version]
- Khayat, Y.; Heydari, R.; Naderi, M.; Dragicevic, T.; Shafiee, Q.; Fathi, M.; Bevrani, H.; Blaabjerg, F. Decentralized frequency control of AC microgrids: An estimation-based consensus approach. IEEE J. Emerg. Select. Top. Power Electron. 2020, 9, 5183–5191. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Mitani, Y.; Phunpeng, V. Applying Virtual Inertia Control Topology to SMES System for Frequency Stability Improvement of Low-Inertia Microgrids Driven by High Renewables. Energies 2019, 12, 3902. [Google Scholar] [CrossRef] [Green Version]
- Gomez, L.A.; Grilo, A.P.; Salles, M.B.C.; Sguarezi Filho, A.J. Combined Control of DFIG-Based Wind Turbine and Battery Energy Storage System for Frequency Response in Microgrids. Energies 2020, 13, 894. [Google Scholar] [CrossRef] [Green Version]
- Kikusato, H.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hashimoto, J.; Otani, K.; Ikeda, N.; Komuro, I.; Yokoi, H.; Takahashi, K. Flywheel energy storage system based microgrid controller design and PHIL testing. Energy Rep. 2022, 8, 470–475. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-order systems and PIλDμ controllers. IEEE Trans. Autom. Control. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Li, H.; Luo, Y.; Chen, Y. A fractional order proportional and derivative (FOPD) motion controller: Tuning rule and experiments. IEEE Trans. Control Syst. Technol. 2009, 18, 516–520. [Google Scholar] [CrossRef]
- Komathi, C.; Umamaheswari, M. Design of Gray Wolf Optimizer Algorithm-Based Fractional Order PI Controller for Power Factor Correction in SMPS Applications. IEEE Trans. Power Electron. 2019, 35, 2100–2118. [Google Scholar] [CrossRef]
- Kesarkar, A.A.; Selvaganesan, N. Tuning of optimal fractional-order PID controller using an artificial bee colony algorithm. Syst. Sci. Control Eng. 2015, 3, 99–105. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.S.; Abido, M.A.Y.; Hussein, A.E.D.; El-Amin, I. Fault Ride through Capability Augmentation of a DFIG-Based Wind Integrated VSC-HVDC System with Non-Superconducting Fault Current Limiter. Sustainability 2019, 11, 1232. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.S.; Abido, M.A.Y.; El-Amin, I. Fault current limiters in power systems: A Comprehensive Review. Energies 2018, 11, 1025. [Google Scholar] [CrossRef] [Green Version]
- Anderson, P.; Bose, A. Stability simulation of wind turbine systems. IEEE Trans. Power Appar. Syst. 1983, 102, 3791–3795. [Google Scholar] [CrossRef]
- Celikel, R.; Yilmaz, M.; Gundogdu, A. A voltage scanning-based MPPT method for PV power systems under complex partial shading conditions. Renew. Energy 2022, 184, 361–373. [Google Scholar] [CrossRef]
- Ray, P.; Mohanty, S.; Kishor, N. Small-signal analysis of autonomous hybrid distributed generation systems in presence of ultracapacitor and tie-line operation. J. Electr. Eng. 2010, 61, 205. [Google Scholar] [CrossRef] [Green Version]
- Barsali, S.; Ceraolo, M. Dynamical models of lead-acid batteries: Implementation issues. IEEE Trans. Energy Convers. 2002, 17, 16–23. [Google Scholar] [CrossRef]
- Garakani, M.A.; Bellani, S.; Pellegrini, V.; Oropesa-Nuñez, R.; Castillo, A.E.D.R.; Abouali, S.; Najafi, L.; Martín-García, B.; Ansaldo, A.; Bondavalli, P.; et al. Scalable spray-coated graphene-based electrodes for high-power electrochemical double-layer capacitors operating over a wide range of temperature. Energy Storage Mater. 2020, 34, 1–11. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Leontaritis, I.; Billings, S.A. Input-output parametric models for non-linear systems part I: Deterministic non-linear systems. Int. J. Control 1985, 41, 303–328. [Google Scholar] [CrossRef]
- Tepljakov, A.; Vunder, V.; Petlenkov, E.; Nakshatharan, S.S.; Punning, A.; Kaparin, V.; Belikov, J.; Aabloo, A. Fractional-order modeling and control of ionic polymer-metal composite actuator. Smart Mater. Struct. 2019, 28, 084008. [Google Scholar] [CrossRef]
- Mirjalili, S.; Dong, J.S.; Lewis, A. Nature-Inspired Optimizers; Springer: Cham, Switzerland, 2020; pp. 69–85. [Google Scholar]
- Alam, M.; Alotaibi, M.A.; Alam, M.A.; Hossain, M.; Shafiullah, M.; Al-Ismail, F.S.; Rashid, M.; Ur, M.; Abido, M.A. High-Level Renewable Energy Integrated System Frequency Control with SMES-Based Optimized Fractional Order Controller. Electronics 2021, 10, 511. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Yadav, M.; Patel, H.K.G. Sensitivity analysis of IMC-PID controller with smith predictor using different filters. In Proceedings of the 2020 IEEE 17th India Council International Conference (INDICON), New Delhi, India, 11–13 December 2020; pp. 1–6. [Google Scholar]
- Srinivasan, V.; Sukavanam, N. Sensitivity analysis of nonlinear fractional order control systems with state delay. Int. J. Comput. Math. 2016, 93, 160–178. [Google Scholar] [CrossRef]
- Hamamci, S.E. An algorithm for stabilization of fractional-order time delay systems using fractional-order PID controllers. IEEE Trans. Autom. Control 2007, 52, 1964–1969. [Google Scholar] [CrossRef]
- Fathy, A.; Yousri, D.; Rezk, H.; Thanikanti, S.B.; Hasanien, H.M. A Robust Fractional-Order PID Controller Based Load Frequency Control Using Modified Hunger Games Search Optimizer. Energies 2022, 15, 361. [Google Scholar] [CrossRef]
- Magdy, G.; Bakeer, A.; Nour, M.; Petlenkov, E. A new virtual synchronous generator design based on the SMES system for frequency stability of low-inertia power grids. Energies 2020, 13, 5641. [Google Scholar] [CrossRef]
- Alam, M.S.; Al-Ismail, F.S.; Abido, M.A. PV/wind-integrated low-inertia system frequency control: PSO-optimized fractional-order PI-based SMES approach. Sustainability 2021, 13, 7622. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value | |
|---|---|---|
| Cluster-A | Cluster-B | |
| Time constant of solar PV system (s) | 1.8 | 1.7 |
| Gain of solar PV system | 1.0 | 0.9 |
| Time constant of wind system (s) | 1.5 | 1.4 |
| Gain of of wind system | 1.0 | 1.2 |
| System gain | 120 | 110 |
| System time constant (s) | 20 | 18 |
| Time constant of solar thermal system (s) | 1.8 | 1.95 |
| Gain of solar thermal system | 1.7 | 1.6 |
| Time constant of diesel generator (s) | 2.0 | 2.22 |
| Gain of solar diesel generator | 0.0033 | 0.004 |
| Time constant of aqua electrolyser (s) | 0.50 | 0.55 |
| Gain of aqua electrolyser | −0.0020 | −0.0022 |
| Time constant of fuel cell (s) | 4.00 | 4.55 |
| Gain of fuel cell | −0.010 | −0.011 |
| Time constant of supercapacitor (s) | 0.100 | 0.122 |
| Gain of supercapacitor | −0.0033 | −0.0040 |
| Optimized proportional gain of controller (s) | 0.1067 | 0.0100 |
| Optimized integral gain of controller (s) | 1.9309 | 10.000 |
| Optimized integral order of controller (s) | 1.2 | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alam, M.S.; Almehizia, A.A.; Al-Ismail, F.S.; Hossain, M.A.; Islam, M.A.; Shafiullah, M.; Ullah, A. Frequency Stabilization of AC Microgrid Clusters: An Efficient Fractional Order Supercapacitor Controller Approach. Energies 2022, 15, 5179. https://doi.org/10.3390/en15145179
Alam MS, Almehizia AA, Al-Ismail FS, Hossain MA, Islam MA, Shafiullah M, Ullah A. Frequency Stabilization of AC Microgrid Clusters: An Efficient Fractional Order Supercapacitor Controller Approach. Energies. 2022; 15(14):5179. https://doi.org/10.3390/en15145179
Chicago/Turabian StyleAlam, Md. Shafiul, Abdullah A. Almehizia, Fahad Saleh Al-Ismail, Md. Alamgir Hossain, Muhammad Azharul Islam, Md. Shafiullah, and Aasim Ullah. 2022. "Frequency Stabilization of AC Microgrid Clusters: An Efficient Fractional Order Supercapacitor Controller Approach" Energies 15, no. 14: 5179. https://doi.org/10.3390/en15145179
APA StyleAlam, M. S., Almehizia, A. A., Al-Ismail, F. S., Hossain, M. A., Islam, M. A., Shafiullah, M., & Ullah, A. (2022). Frequency Stabilization of AC Microgrid Clusters: An Efficient Fractional Order Supercapacitor Controller Approach. Energies, 15(14), 5179. https://doi.org/10.3390/en15145179