
Refined 1D–3D Coupling for High-Frequency Forced Vibration Analysis in Hydraulic Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Governing Equations and the Coupling Method
2.1. 1D MOC Model
2.2. 3D CFD Model
- 1.
- Update mesh and obtain the mesh motion velocity at the current time step;
- 2.
- Solve the continuity Equation (11) to update the density;
- 3.
- Construct and discretize the momentum Equation (12) to obtain Equation (13);
- 4.
- Solve the discretized momentum Equation (14) to derive the predicted velocity;
- 5.
- Construct and solve the pressure Equation (18);
- 6.
- Correct the velocity by Equation (14);
- 7.
- Resolve continuity Equation (11) and update the density;
- 8.
- If the maximum inner iteration of PIMPLE is reached, go to the next step; otherwise, go to step 5;
- 9.
- If the maximum outer iteration of PIMPLE is reached, go to the next step; otherwise, go to step 3;
- 10.
- Enter the next time step.
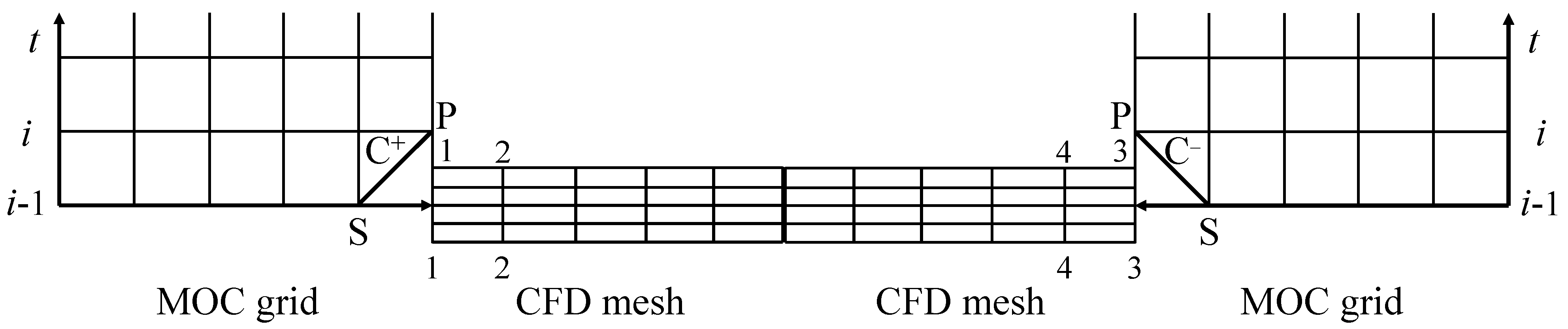
2.3. 1D–3D Coupling Interface
- 1.
- Carry out the 1D MOC part simulation;
- 2.
- Carry out the 3D CFD part simulation;
- 3.
- Derive the values of pressure and velocity at the coupling interface at the next time step by the variables at the current time step;
- 4.
- Enter next time step.
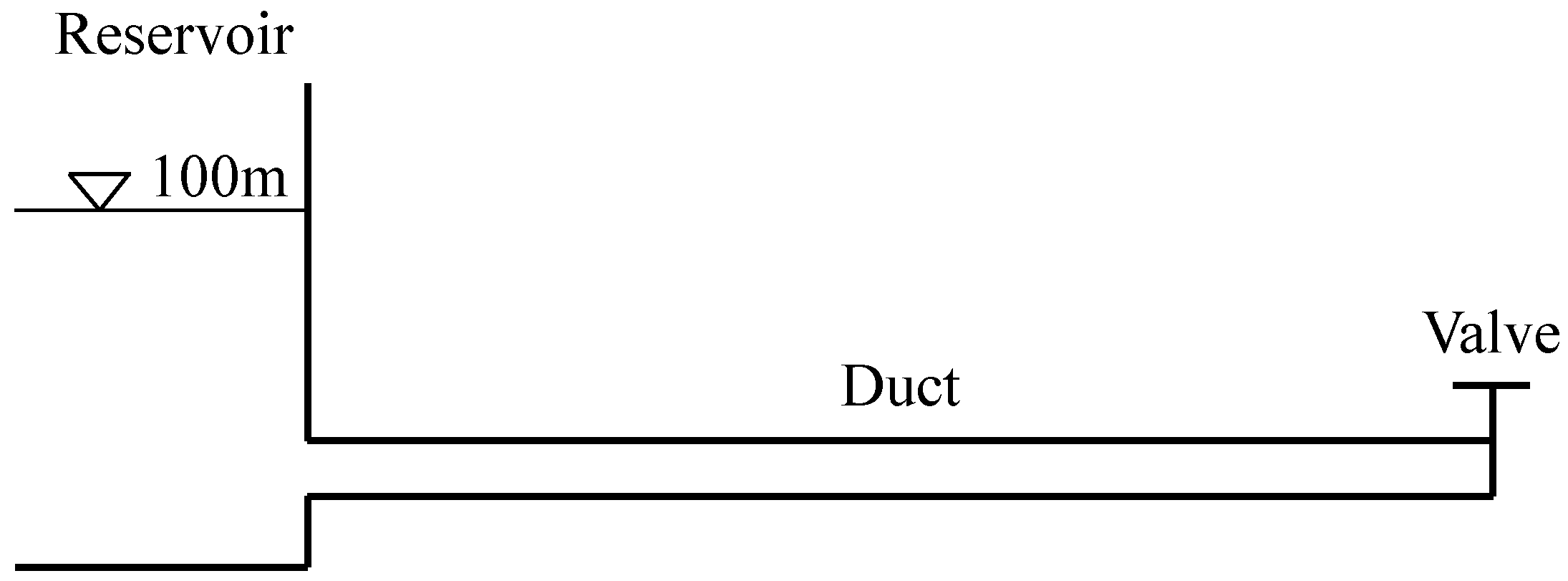
3. Validation of the Established Model
3.1. 1D–3D Coupling Validation
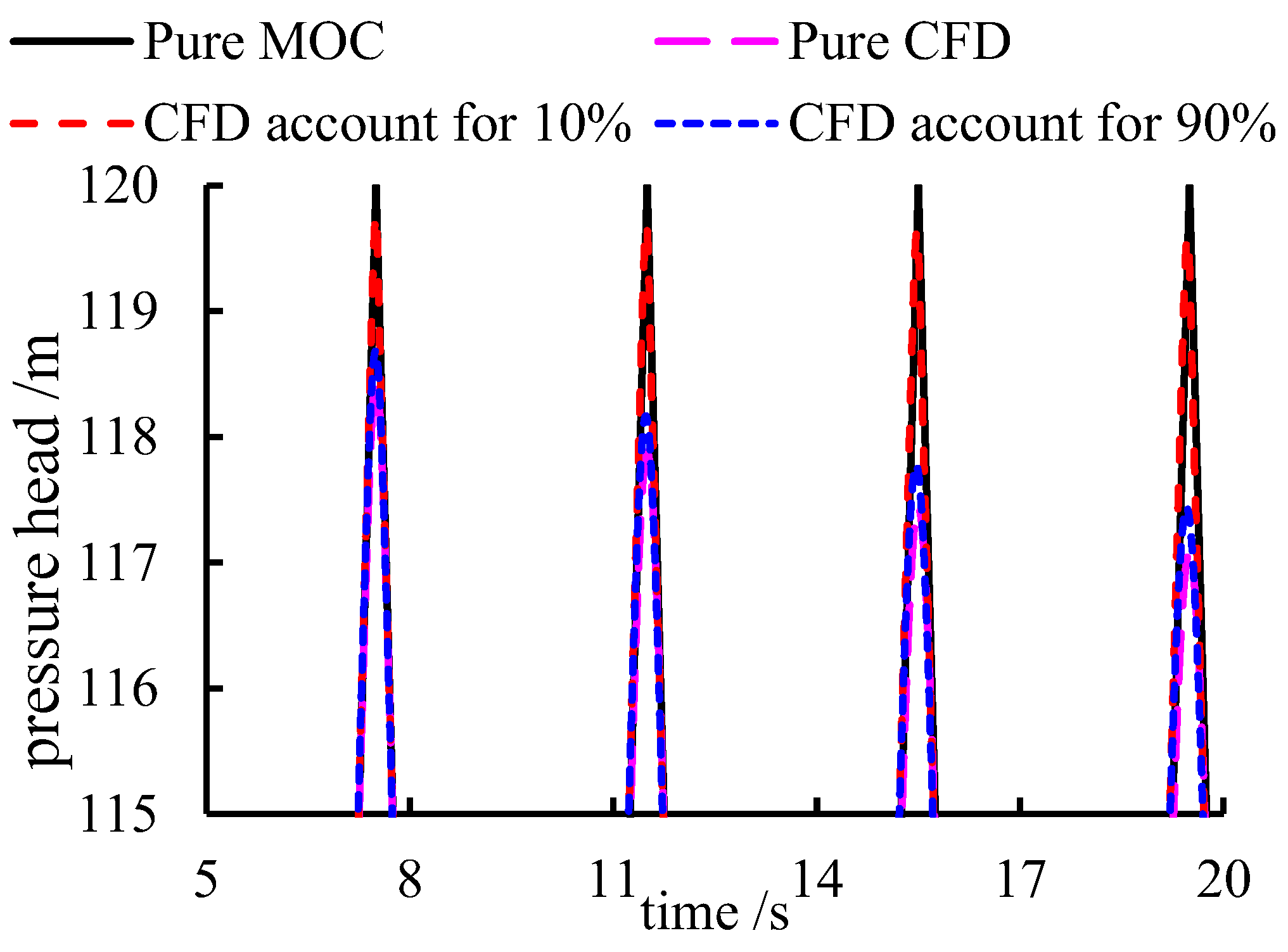
- a.
- Pure CFD.
- b.
- Pure MOC.
- c.
- The length of the CFD part takes 10% of the total length of the duct.
- d.
- The length of the CFD part takes 90% of the total length of the duct.
3.1.1. Discharge Linearly Increases at the Valve
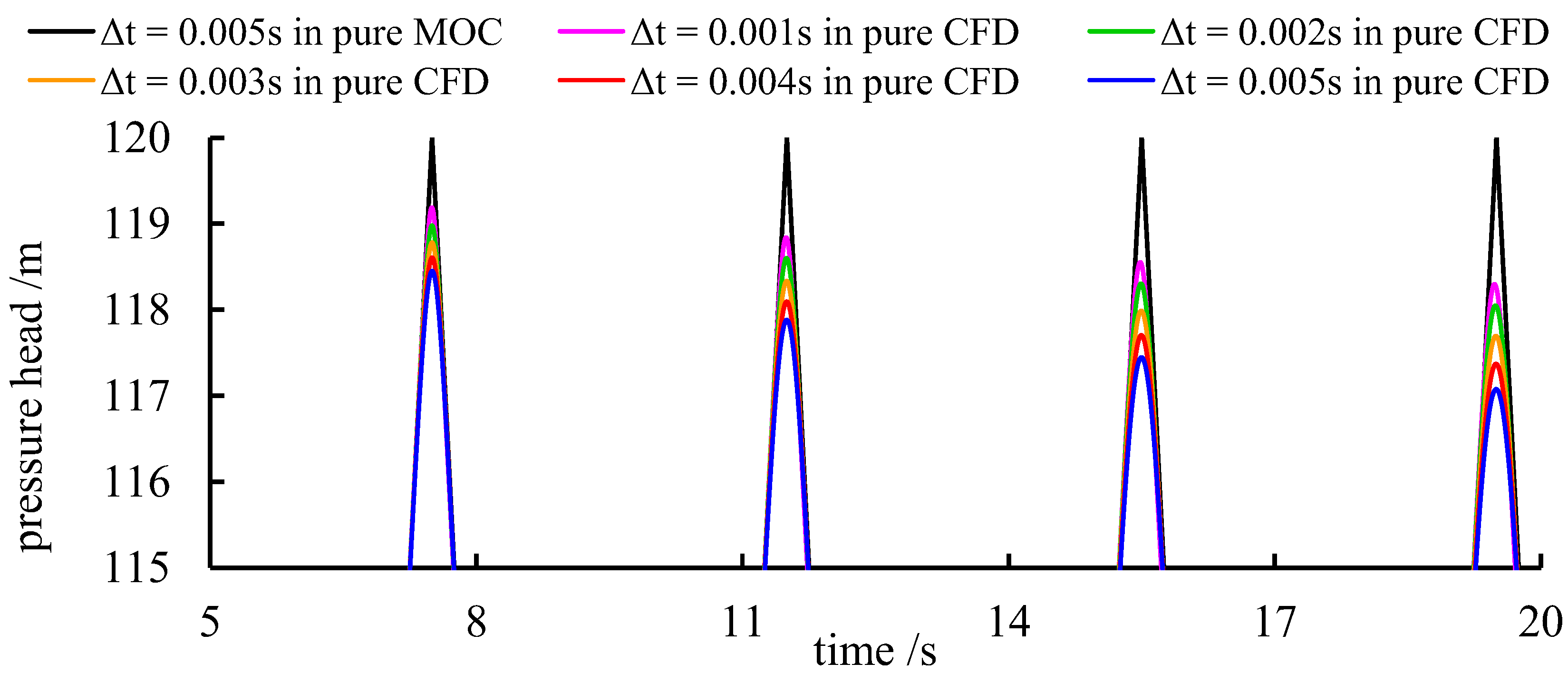
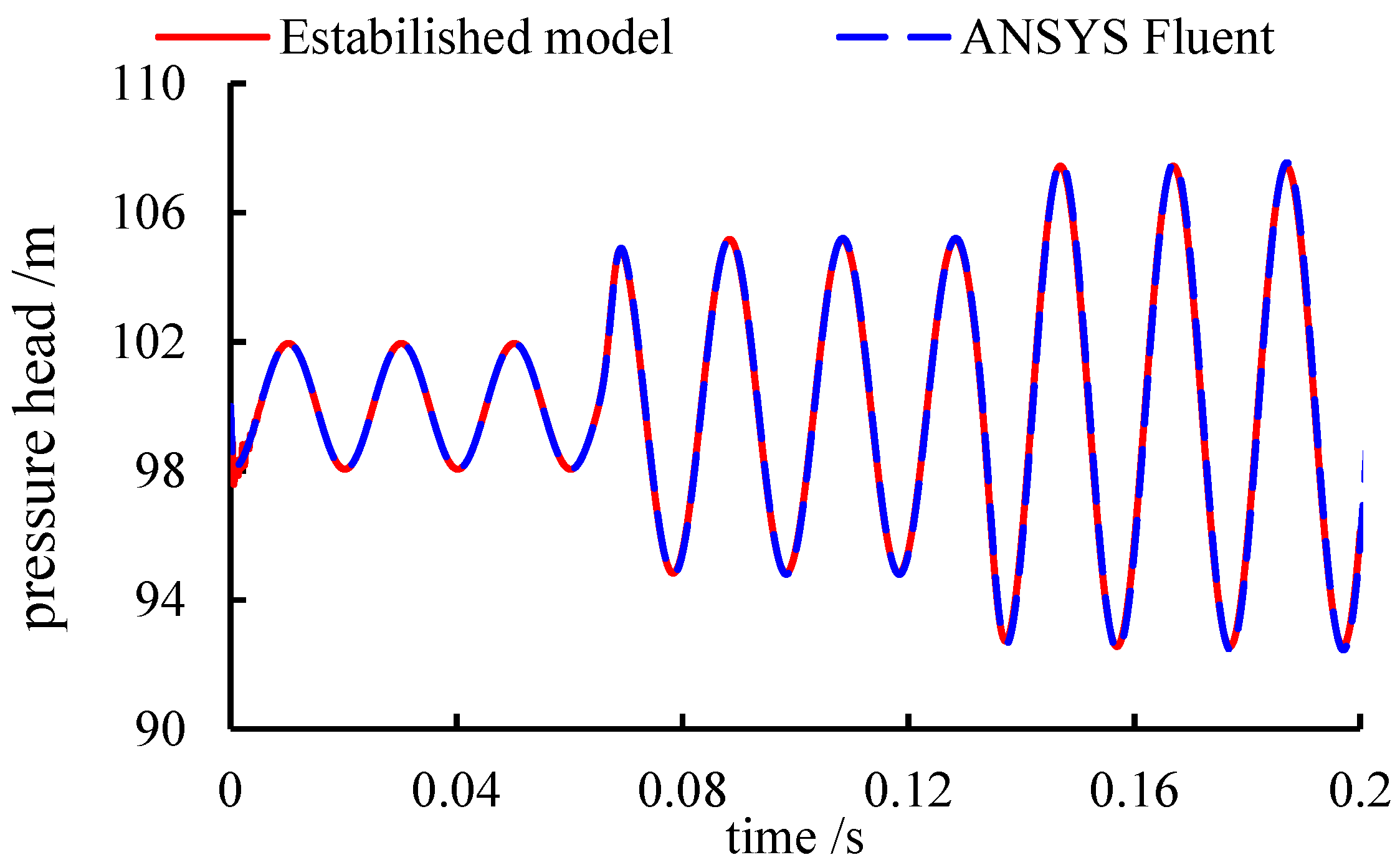
3.1.2. Pressure Oscillation at the Valve
3.2. Dynamic Mesh Validation
4. Forced Vibration Analysis
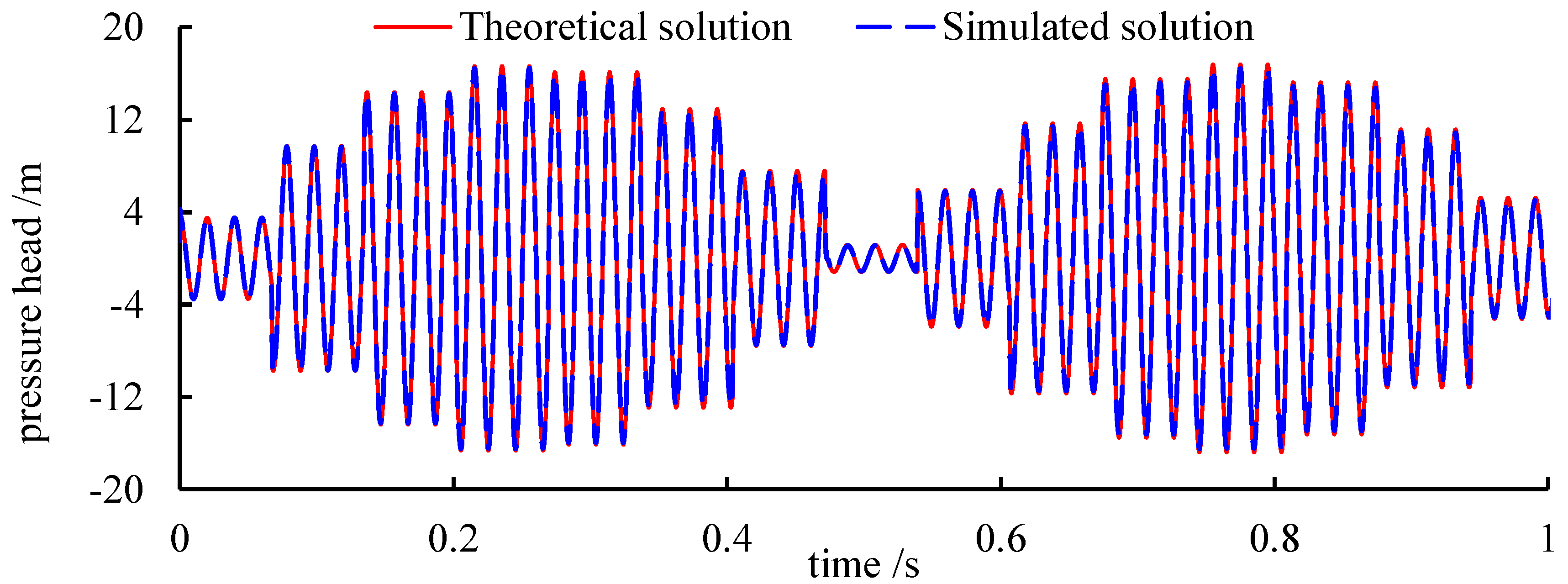
4.1. Pressure Oscillation Induced by Wall Vibration
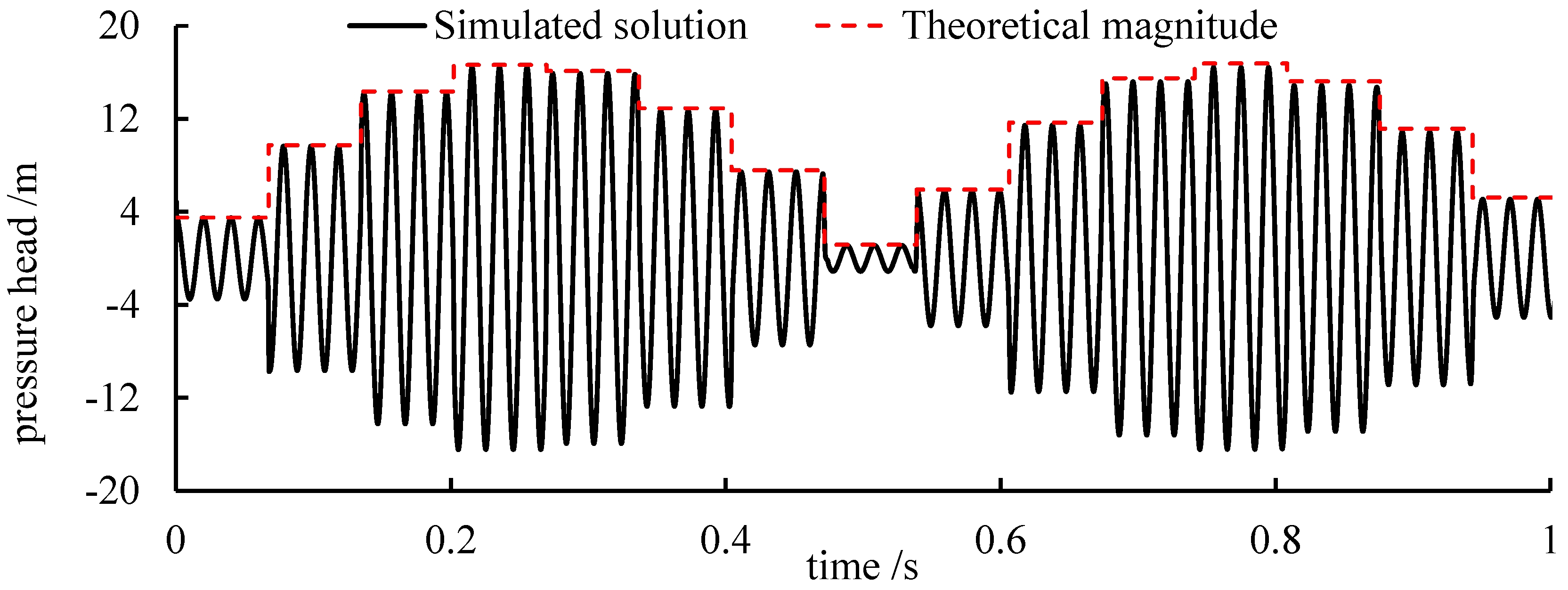
4.2. Magnitude of the Pressure Fluctuation
5. Conclusions
- (1)
- The established 1D–3D coupling model could comparably precisely simulate the dynamic process of the pressure oscillation and propagation in the pipe system, overcoming the overdetermined problem in the traditional 1D method. The established model is applicable to forced vibration analysis in the hydraulic system.
- (2)
- The magnitude of the original pressure oscillation could be enlarged several times by the reflected waves. Additionally, the coupling method of 1D–3D could accurately consider the influence of the reflected waves with comparatively low computational resources required.
- (3)
- The pressure oscillation in the hydraulic system satisfies the independence principle. Additionally, the exhibit pressure fluctuation is the multiple superpositions of the traveling and the standing waves.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AC | Adjacent Coupling. |
| CFD | Computational Fluid Dynamics. |
| FVM | Finite Volume Method. |
| HFPF | High-Frequency Pressure Fluctuation. |
| MOC | Method of Characteristics. |
| POC | Partly Overlapped Coupling. |
| RDRS | Reservoir–Duct–Reservoir System. |
| RDVS | Reservoir–Duct–Valve System. |
| Nomenclature | |
| Cross-sectional area of the pipe, [m2]. | |
| Minimum cross-sectional area of the pipe during the pipe vibration, [m2]. | |
| , | Diagonal and off diagonal coefficients in discrete momentum equation; []. |
| Water hammer velocity, [m/s]. | |
| Frequency, [Hz]. | |
| Operator in the decoupling of pressure and velocity, [m/s]. | |
| Pressure head, [m]. | |
| Gravity acceleration, [m/s2]. | |
| Bulk modulus, [kg/(m·s2)]. | |
| Length of the pipe, [m]. | |
| Pressure, [pa]. | |
| Magnitude of the pressure oscillation, [pa]. | |
| Discharge, [m3/s]. | |
| Source term in the discrete momentum equation, [kg/(m2·s2)]. | |
| Displacement of the walls of the pipe, [m]. | |
| Vibration amplitude of the walls of the pipe, [m]. | |
| Time coordinate, [s]. | |
| Three-dimensional fluid velocity, [m/s]. | |
| Velocity of the moving mesh, [m/s]. | |
| One-dimensional fluid velocity, [m/s]. | |
| Space coordinate, [m]. | |
| Density, [kg/m3]. | |
| Dynamic viscosity, [kg/(m·s)]. | |
| Angular frequency, [rad/s]. | |
| Space step, [m]. | |
| Time step, [s]. | |
References
- Favrel, A.; Müller, A.; Landry, C.; Yamamoto, K.; Avellan, F. Study of the vortex-induced pressure excitation source in a Francis turbine draft tube by particle image velocimetry. Exp. Fluids 2015, 56, 215. [Google Scholar] [CrossRef]
- Trivedia, C.; Gandhi, B.K.; Cervantes, M.J.; Dahlhaug, O.G. Experimental investigations of a model Francis turbine during shutdown at synchronous speed. Renew. Energy 2015, 83, 828–836. [Google Scholar] [CrossRef]
- Qian, Z.D.; Yang, J.D.; Huai, W.X. Numerical simulation and analysis of pressure pulsation in Francis hydraulic turbine with air admission. J. Hydrodyn. 2007, 19, 467–472. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, Q.; Kong, X. Wavelet-based pressure analysis for hydraulic pump health diagnosis. Trans. ASAE 2003, 46, 969–976. [Google Scholar]
- Yang, Y.; Zhou, L.; Shi, W.D.; He, Z.; Han, Y.; Xiao, Y. Interstage difference of pressure pulsation in a three-stage electrical submersible pump. J. Pet. Sci. Eng. 2021, 196, 107653. [Google Scholar] [CrossRef]
- Yang, S.S.; Kong, F.Y.; Qu, X.Y.; Jiang, W.-M. Influence of blade number on the performance and pressure pulsations in a pump used as a turbine. J. Fluids Eng.-Trans. ASME 2012, 134, 124503. [Google Scholar] [CrossRef]
- Kirschner, O.; Ruprecht, A.; Gode, E.; Riedelbauch, S. Experimental Investigation of Pressure Fluctuations Caused by a Vortex Rope in a Draft Tube. In Proceedings of the 26th IAHR Symposium on Hydraulic Machinery and Systems, Tsinghua University, Beijing, China, 19–23 August 2012. [Google Scholar]
- Valentín, D.; Presas, A.; Egusquiza, E.; Valero, C.; Egusquiza, M.; Bossio, M. Power swing generated in Francis turbines by part load and overload instabilities. Energies 2017, 10, 2124. [Google Scholar] [CrossRef] [Green Version]
- Hasmatuchi, V.; Farhat, M.; Roth, S.; Botero, F.; Avellan, F. Experimental evidence of rotating stall in a pump-turbine at off-design conditions in generating mode. J. Fluids Eng.-Trans. ASME 2011, 133, 051104. [Google Scholar] [CrossRef]
- Zhang, X.X.; Cheng, Y.G.; Xia, L.S.; Yang, J.D.; Qian, Z.D. Looping dynamic characteristics of a pump-turbine in the s-shaped region during runaway. J. Fluids Eng.-Trans. ASME 2016, 138, 091102. [Google Scholar] [CrossRef]
- Zhou, J.X.; Cai, F.L.; Wang, Y. New elastic model of pipe flow for stability analysis of the governor-turbine-hydraulic system. J. Hydraul. Eng.-ASCE 2011, 137, 1238–1247. [Google Scholar] [CrossRef]
- Suo, L.S.; Wylie, E.B. Impulse response method for frequency-dependent pipeline transients. J. Hydraul. Eng. 1989, 111, 478–483. [Google Scholar] [CrossRef]
- Suo, L.S.; Wylie, E.B. Hydraulic transients in rock-bored tunnels. J. Hydraul. Eng. 1990, 116, 196–210. [Google Scholar] [CrossRef]
- Ruchonnet, N. Multiscale Computational Methodology Applied to Hydroacoustic Resonance in Cavitating Pipe Flow. Ph.D. Thesis, Swiss federal Institute of Technology in Lausanne, Lausanne, Switzerland, 2010. [Google Scholar]
- Wylie, E.B.; Streeter, V.L.; Suo, L.S. Fluid Transients in Systems; Prentice-Hall: New York, NY, USA, 1993. [Google Scholar]
- Morris, D. Linear Control Systems Engineering; Tsinghua University Press: Beijing, China, 2005. [Google Scholar]
- Yan, W.J.; Yang, J.B.; Zhao, Z.G.; Yang, J.D.; Yang, W.J. Global matrix method for frequency-domain stability analysis of hydropower generating system. J. Clean. Prod. 2022, 333, 130097. [Google Scholar] [CrossRef]
- Yang, X.W.; Lian, J.J.; Wang, H.J.; Luo, L.W. Study on the forced vibration induced by the high-frequency pipe vibration. J. Hydroelectr. Eng. 2022, 6, 102–111. [Google Scholar]
- Zhou, J.X. Vibration Characteristics and Stability Analysis of Hydropower Station with Long Water Conveyance System; China Water & Power Press: Beijing, China, 2011. (In Chinese) [Google Scholar]
- Orczyk, J.J.; Barczak, A.; Costa-Faidella, J.; Kajikawa, Y. Cross laminar traveling components of field potentials due to volume conduction of non-traveling neuronal activity in macaque sensory cortices. J. Neurosci. 2021, 41, 7578–7590. [Google Scholar] [CrossRef]
- Sturzebecher, D.; Nitsche, W. Active cancellation of tollmien-schlichting instabilities on a wing using multi-channel sensor actuator systems. Int. J. Heat Fluid Flow 2003, 24, 572–583. [Google Scholar] [CrossRef]
- Li, Y.B.; Ren, Y.K.; Liu, W.Y.; Chen, X.M.; Tao, Y.; Jiang, H.Y. On controlling the flow behavior driven by induction electrohydrodynamics in microfluidic channels. Electrophoresis 2017, 38, 983–995. [Google Scholar] [CrossRef]
- Semerci, D.S.; Yavuz, T.I. Increasing Efficiency of an Existing Francis Turbine by Rehabilitation Process. In Proceedings of the 5th IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016. [Google Scholar]
- Tiwari, G.; Kumar, J.; Prasad, V.; Patel, V.K. Utility of CFD in the design and performance analysis of hydraulic turbines—A review. Energy Rep. 2020, 6, 2410–2429. [Google Scholar] [CrossRef]
- Oh, H.W.; Yoon, E.S. Application of computational fluid dynamics to performance analysis of a francis hydraulic turbine. Proc. Inst. Mech. Eng. Part A 2007, 221, 583–590. [Google Scholar] [CrossRef]
- Fu, X.L.; Li, D.Y.; Wang, H.J.; Li, Z.G.; Zhao, Q.; Wei, X.Z. One- and three-dimensional coupling flow simulations of pumped-storage power stations with complex long-distance water conveyance pipeline system. J. Clean. Prod. 2021, 315, 128228. [Google Scholar] [CrossRef]
- Kong, K.J.; Jung, S.H.; Jeong, T.Y.; Koh, D.K. 1D-3D coupling algorithm for unsteady gas flow analysis in pipe systems. J. Mech. Sci. Technol. 2019, 33, 4521–4528. [Google Scholar] [CrossRef]
- Liu, D.M.; Zhang, X.X.; Yang, Z.Y.; Liu, K.; Cheng, Y.G. Evaluating the pressure fluctuations during load rejection of two pump-turbines in a prototype pumped-storage system by using 1d-3d coupled simulation. Renew. Energy 2021, 171, 1276–1289. [Google Scholar] [CrossRef]
- Toti, A.; Vierendeels, J.; Belloni, F. Coupled system thermal-hydraulic/CFD analysis of a protected loss of flow transient in the MYRRHA reactor. Ann. Nucl. Energy 2018, 118, 199–211. [Google Scholar] [CrossRef]
- Zhang, H.; Guo, J.; Lu, J.; Niu, J.; Li, F.; Xu, Y. The comparison between nonlinear and linear preconditioning JFNK method for transient neutronics/thermal-hydraulics coupling problem. Ann. Nucl. Energy 2019, 132, 257–368. [Google Scholar] [CrossRef]
- Gui, X.; Wong, L.N.Y. A 3D fully thermo–hydro–mechanical coupling model for saturated poroelastic medium. Comput. Methods Appl. Mech. Eng. 2022, 394, 114939. [Google Scholar]
- Yang, S.; Chen, X.; Wu, D.Z.; Yan, P. Dynamic analysis of the pump system based on MOC-CFD coupled method. Ann. Nucl. Energy 2015, 78, 60–69. [Google Scholar] [CrossRef]
- Wu, D.Z.; Yang, S.; Wu, P.; Wang, L. MOC-CFD coupled approach for the analysis of the fluid dynamic interaction between water hammer and pump. J. Hydraul. Eng. 2015, 141, 06015003. [Google Scholar] [CrossRef]
- Ruprecht, A.; Helmrich, T.; Aschenbrennert, T.; Scherer, T. Simulation of vortex rope in a turbine draft tube. In Proceedings of the 21st IAHR Symposium on Hydraulic Machinery and Systems, Lausanne, Switzerland, 9–12 September 2002. [Google Scholar]
- Ruprecht, A.; Helmrich, T. Simulation of the water hammer in a hydro power plant caused by draft tube surge. In Proceedings of the 4th ASME/JSME Joint Fluids Engineering Conference, Honolulu, HI, USA, 6–10 July 2003. [Google Scholar]
- Zhang, X.X.; Cheng, Y.G. Simulation of hydraulic transients in hydropower systems using the 1-D–3-D coupling approach. J. Hydrodyn. 2012, 24, 595–604. [Google Scholar] [CrossRef]
- Wang, C.; Nilsson, H.; Yang, J.D.; Petit, O. 1D–3D coupling for hydraulic system transient simulations. Comput. Phys. Commun. 2017, 210, 1–9. [Google Scholar] [CrossRef]
- Politano, M.; Odgaard, A.J.; Klecan, W. Case study: Numerical evaluation of hydraulic transients in a combined sewer overflow tunnel system. J. Hydraul. Eng. 2007, 133, 1103–1110. [Google Scholar] [CrossRef]
- Jasak, H. Error Analysis and Estimation for the Finite Volume Method with Applications to Fluid Flows. Ph.D. Thesis, Imperial College London, London, UK, 1996. [Google Scholar]
- Moukalled, F.; Mangani, L.; Darwish, M. The Finite Volume Method in Computational Fluid; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Ansys Inc. Ansys Fluent User’s Guide; Ansys Inc.: Canonsburg, PA, USA, 2020. [Google Scholar]
- Open FOAM Foundation Ltd. Open FOAM User Guide; Open FOAM Foundation Ltd.: London, UK, 2020. [Google Scholar]
- Ansys Inc. Ansys Fluent Theory Guide; Ansys Inc.: Canonsburg, PA, USA, 2020. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Ye, Y.; Zhang, X.; Yang, X.; Wang, H. Refined 1D–3D Coupling for High-Frequency Forced Vibration Analysis in Hydraulic Systems. Energies 2022, 15, 6051. https://doi.org/10.3390/en15166051
Zhou X, Ye Y, Zhang X, Yang X, Wang H. Refined 1D–3D Coupling for High-Frequency Forced Vibration Analysis in Hydraulic Systems. Energies. 2022; 15(16):6051. https://doi.org/10.3390/en15166051
Chicago/Turabian StyleZhou, Xijun, Yongjin Ye, Xianyu Zhang, Xiuwei Yang, and Haijun Wang. 2022. "Refined 1D–3D Coupling for High-Frequency Forced Vibration Analysis in Hydraulic Systems" Energies 15, no. 16: 6051. https://doi.org/10.3390/en15166051